Изобретение относится к области кораблевождения, а именно к способам и устройствам измерения скорости судна доплеровским методом.
Для повышения точности измерения скорости судна широко применяется схема «Янус» излучения зондирующих сигналов (ЗС) и приема эхо-сигналов (ЭС), отраженных от дна, по двум наклонным лучам, симметричным в вертикальной плоскости относительно вертикали и противоположно направленных в горизонтальной плоскости (фиг. 1).
На фиг. 1: V - скорость судна,  - угол между направлением вертикально вниз и направлением излучения.
- угол между направлением вертикально вниз и направлением излучения.
В основе схемы «Янус» лежит измерение доплеровской частоты ƒдоп как разности частот ЭС, отраженных от дна, полученных с двух направлений излучения ЗС:

где ƒЭС/нос, ƒЭС/корма - частоты эхо-сигналов, отраженных от дна и принимаемых по лучам, направленным под углом в нос и корму, соответственно. При отсутствии возмущений, обусловленных качкой и рысканием судна, ƒЭС/нос и ƒЭС/корма вычисляются по формулам [1]:

где
ƒЗС - частота ЗС;
с - скорость звука в воде.
Подставляя (2) в (1), получим:

Раскрывая скобки и выполняя очевидные преобразования, получим формулу для вычисления скорости судна [1, формула (2.8)]:

Как правило, на практике одновременно используются две схемы «Янус» во взаимно перпендикулярных направлениях, что позволяет определять две проекции скорости судна.
Одним из факторов, снижающих точность определения скорости судна доплеровским лагом, является вертикальное перемещение судна, обусловленное влиянием волнения для надводного судна либо рысканием по глубине для подводной лодки [1, 2].
Вертикальное перемещение судна в момент излучения зондирующего сигнала (ЗС) и приема эхо-сигнала (ЭС), отраженного от дна, приводит к дополнительным ошибкам измерения скорости, пропорциональным проекции скорости вертикального перемещения судна на направление излучения ЗС.
С учетом вертикального перемещения формулы (2) примут вид:
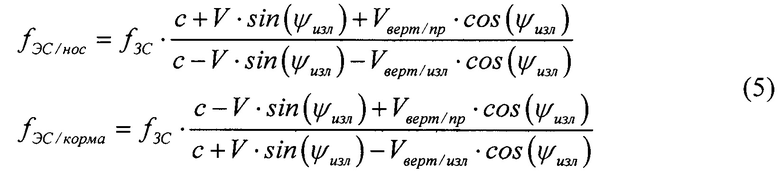
где Vверт/изл, Vверт/пр - скорости вертикального перемещения судна в момент излучения ЗС и приема ЭС, соответственно (положительная скорость соответствует перемещению вниз, отрицательная - вверх).
Подставляя (5) в (1), получим:

Раскрывая в (6) скобки и выполняя очевидные преобразования, получим формулу для вычисления скорости судна с учетом его вертикального перемещения:

Рассмотрим частный случай, когда скорости вертикального перемещения судна в момент излучения ЗС и приема ЭС равны по модулю, т.е. |Vверт/изл|=|Vверт/пр|:

Из формулы (8) следует, что при наличии вертикального перемещения судна к формуле (4) для вычисления скорости судна в отсутствии возмущений, добавляется еще одни сомножитель, основу которого составляет разность между единицей и отношением проекции скорости вертикального перемещения судна на направление излучения к скорости звука в воде. При разнонаправленном вертикальном перемещении судна в моменты излучения и приема сигнала этот сомножитель имеет первую степень, при однонаправленном - вторую.
Если при вычислении скорости судна не учитывать наличие его вертикального перемещения (т.е. применять формулу (4)), то при типовой скорости вертикального перемещения 2 м/с ошибка определения скорости судна составит 0,15% при разнонаправленном вертикальном перемещении судна в моменты излучения и приема сигнала и 0,25% при однонаправленном, что является достаточно большой величиной (например, при скорости судна 10 м/с ошибка будет равна 25 мм/с при типовой норме 10 мм/с). Отсюда следует вывод, что вертикальное перемещение судна при определении скорости судна доплеровским лагом необходимо учитывать.
В качестве прототипа выбран описанный в работе [1] способ измерения скорости судна доплеровским лагом, включающий одновременное излучение двух тональных зондирующих сигналов по двум наклонным симметричным в вертикальной плоскости относительно вертикального направления и разнонаправленным в горизонтальной плоскости лучам, формирование двух характеристик направленности для приема сигналов с направлений излучения, обнаружение в каждой сформированной характеристике направленности отраженного от дна эхо-сигнала и измерение его частоты, вычисление разности частот сигналов, измеренных на выходе двух сформированных характеристик направленности, с использованием которой по формуле (4) вычисление скорости судна. Блок схема способа-прототипа приведена на фиг. 2.
Решаемая задача предлагаемого способа - повышение качества кораблевождения.
Технический результат - повышение точности измерения скорости судна в условиях его вертикального перемещения.
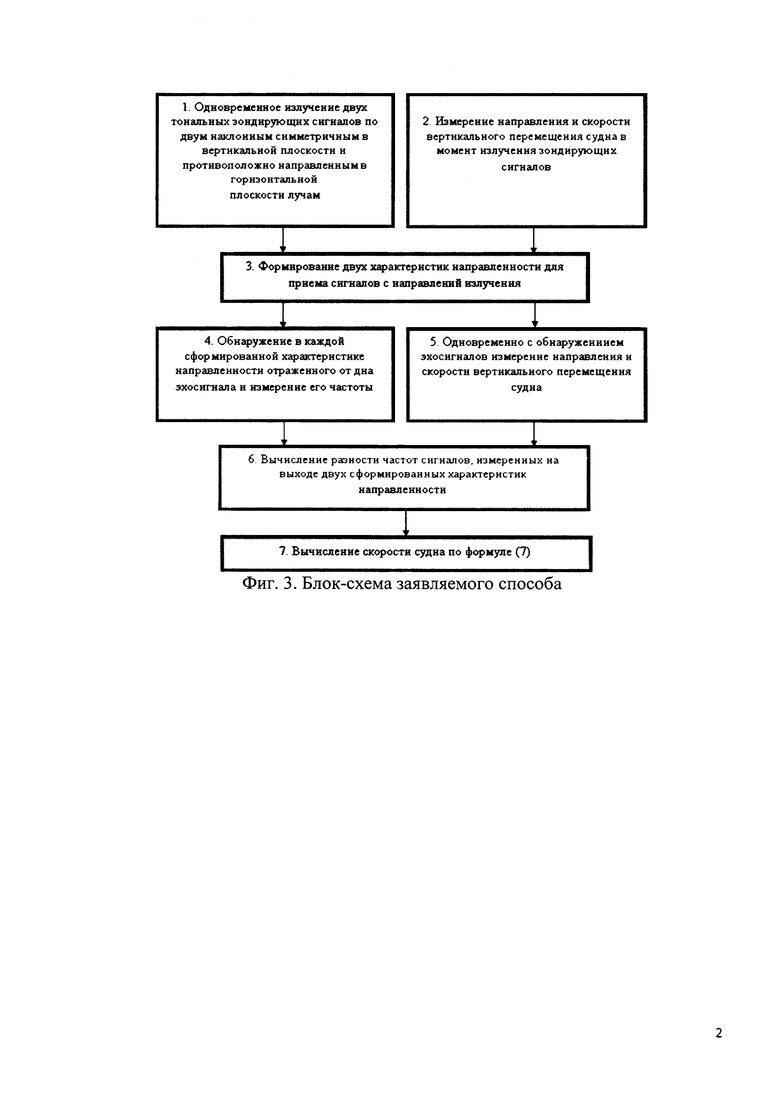
Указанный технический результат достигается тем, что дополнительно к способу-прототипу измеряют направление и скорость вертикального перемещения судна в моменты излучения зондирующих сигналов и обнаружения эхо-сигналов, которые учитывают при вычислении скорости судна по формуле (7).
Как показано выше, реализация заявляемого способа при типовой скорости вертикального перемещения 2 м/с позволяет сократить ошибку определения скорости судна от 0,15% до 0,25% (например, при скорости судна 10 м/с повышение точности измерения скорости судна составит от 15 до 25 мм/с (при типовой норме точности измерения скорости судна 10 мм/с).
Таким образом, заявленный технический результат - повышение точности измерения скорости судна в условиях его вертикального перемещения - можно считать достигнутым.
Блок-схема реализации заявляемого способа приведена на фиг. 3.
Источники информации
1. Виноградов К.А., Кошкарев В.Н., Осюхин Б.А., Хребтов А.А. Абсолютные и относительные лаги. // Л.: Судостроение, 1990.
2. Богородский В.В. и др. Гидроакустическая техника исследования и освоения океана. // Л.: Гидрометиздат, 1984, 264 с.
3. Хребтов А.А., Виноградов К.А., Кошкарев В.Н., и др. Судовые измерители скорости. // Л.: Судостроение, 1978.
4. Виноградов К.А., Новиков И.А., Гидроакустические навигационные системы и средства. // Навигация и гидрография, 1999, №7.
5. Патент РФ №2439613. Гидроакустический доплеровский лаг с алгоритмом многоальтернативной фильтрации эхо-сигнала, основанным на использовании банка фильтров Калмана.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения скорости судна доплеровским лагом | 2018 |
|
RU2702696C1 |
| Способ измерения скорости судна доплеровским лагом | 2017 |
|
RU2665345C1 |
| Способ измерения скорости судна доплеровским лагом | 2017 |
|
RU2672464C1 |
| Способ измерения частоты эхосигнала в доплеровском лаге | 2017 |
|
RU2670714C9 |
| Способ измерения скорости судна доплеровским лагом | 2017 |
|
RU2655019C1 |
| Способ измерения скорости судна доплеровским лагом | 2017 |
|
RU2659710C1 |
| Акустический доплеровский способ профилирования течений в водной среде | 2024 |
|
RU2840131C1 |
| Лазерный судовой измеритель скорости | 2018 |
|
RU2689273C1 |
| Способ формирования характеристики направленности плоской, горизонтально расположенной многоэлементной излучающей антенны доплеровского лага | 2017 |
|
RU2655020C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |

Изобретение относится к области кораблевождения, а именно к способам и устройствам измерения абсолютной скорости судна. Достигаемый технический результат - повышение точности измерения скорости судна доплеровским лагом в условиях вертикального перемещения судна. Указанный технический результат достигается тем, что в доплеровском лаге, функционирующем по схеме "Янус", дополнительно измеряют направление и скорость вертикального перемещения судна в момент излучения зондирующих сигналов и в момент обнаружения эхо-сигналов, отраженных от дна, которые учитывают при вычислении скорости судна. 1 з.п. ф-лы, 3 ил.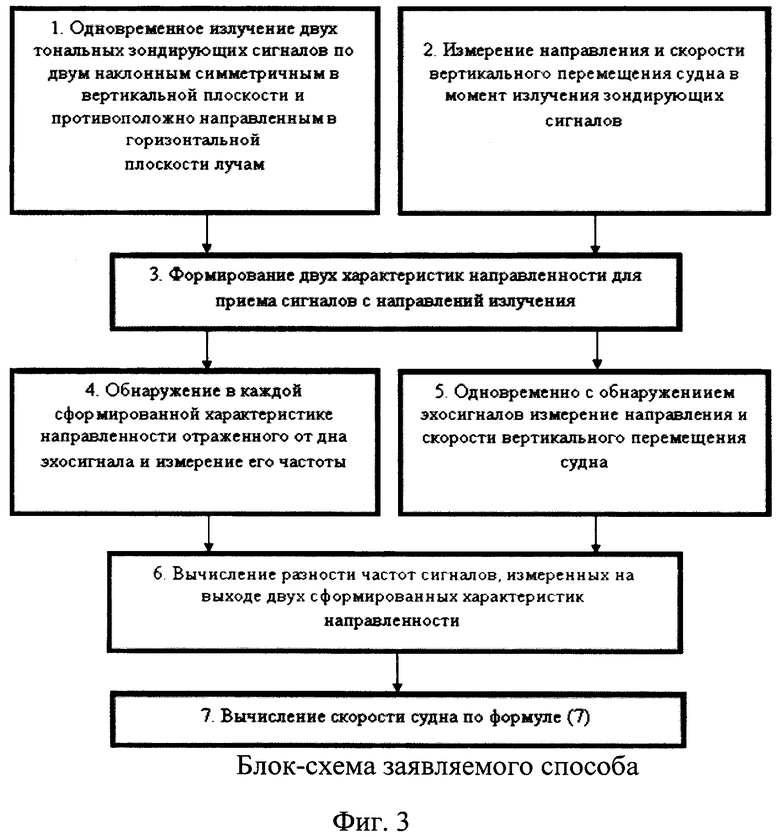
1. Способ измерения скорости судна доплеровским лагом, включающий одновременное излучение двух тональных зондирующих сигналов по двум наклонным лучам, симметричным в вертикальной плоскости относительно вертикального направления и противоположно направленным в горизонтальной плоскости, формирование двух характеристик направленности для приема сигналов с направлений излучения, обнаружение в каждой сформированной характеристике направленности отраженного от дна эхо-сигнала и измерение его частоты, вычисление разности частот сигналов, измеренных на выходе двух сформированных характеристик направленности, вычисление скорости судна с использованием вычисленной разности частот, отличающийся тем, что дополнительно измеряют направление и скорость вертикального перемещения судна в момент излучения зондирующих сигналов и в момент обнаружения эхо-сигналов, которые учитывают при вычислении скорости судна.
2. Способ по п. 1, отличающийся тем, что учет направления и скорости вертикального перемещения судна в момент излучения зондирующих сигналов и в момент обнаружения эхо-сигналов осуществляют по формуле
 ,
,
где
V - скорость судна, м/с;
ψизл - угол между направлением излучения/приема каждого луча и направлением вертикально вниз, град;
 - частота зондирующего сигнала, Гц;
- частота зондирующего сигнала, Гц;
 - разность частот эхо-сигналов, отраженных от дна, обнаруженных на выходе двух характеристик направленности, Гц;
- разность частот эхо-сигналов, отраженных от дна, обнаруженных на выходе двух характеристик направленности, Гц;
c - скорость звука в воде, м/с;
Vверт/изл, Vверт/пр - скорости вертикального перемещения судна в момент излучения зондирующих сигналов и в момент обнаружения эхо-сигналов, отраженных от дна, м/с (положительная скорость соответствует перемещению вниз, отрицательная - вверх).
| Способ образования вихревой воронки в верхнем бьефе гидротехнических сооружений | 1947 |
|
SU75062A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ СУДНА ОТНОСИТЕЛЬНО ДНА | 1992 |
|
RU2037847C1 |
| Устройство для придания блеска завитым целлюлозным волокнам | 1931 |
|
SU38959A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОЙ СКОРОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263329C1 |
| Устройство, сигнализирующее о поломке клапана иголки на Рашель машине | 1928 |
|
SU14680A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ СУДНА ОТНОСИТЕЛЬНО ДНА | 1992 |
|
RU2042152C1 |
| US 20170315234 A1, 02.11.2017 | |||
| WO 2017189740 A1, 02.11.2017. | |||

