Изобретение относится к приборостроению, а именно к приборам для измерения скорости и направления - анемометрам, и предназначено для измерения скорости и направления перемещения воздушных масс в трехмерном пространстве.
Известен анемометр, содержащий закрепленный на выдвижной штанге первичный преобразователь, выполненный в виде шестилопастной крыльчатки, бесконтактный индуктивный переключатель и блок обработки данных, соединенный с первичным преобразователем спиральным проводником, размещенным в штанге. Возникающие при вращении крыльчатки электрические импульсы поступают к блоку обработки данных, где они преобразовываются в линейно-пропорциональное к частоте импульсов показание скорости течения (Анемометр / [Электронный ресурс]. - Режим доступа: http://granat-e.ru/apr_2.html (дата обращения: 22.01.2018)).
Основными недостатками описанного анемометра являются пониженная точность измерения, пониженные надежность и срок службы вследствие наличия подвижной механической части, в которой коэффициент скольжения оси крыльчатки может зависеть от времени и внешних условий. Кроме того, функциональные возможности известного устройства ограничены измерением вектора скорости только по одной координате.
Эти недостатки частично устраняются в акустическом анемометре, содержащем восемь пьезоэлектрических преобразователей, закрепленных на каркасе, выполненном в виде двух колец, расположенных во взаимно-ортогональных плоскостях, ориентированных вертикально, блок формирования сигнала, приема и обработки данных, к выводам которого подключены пьезоэлектрические преобразователи, и блок сбора информации. При этом на каждом кольце через равномерные промежутки закреплены четыре пьезоэлектрических преобразователя с пересечением осей симметрии в центре кольца, в сторону которого направлены рабочие поверхности пьезоэлектрических преобразователей, предназначенных для излучения и приема акустических колебаний. Анемометр предназначен для измерения трех ортогональных компонентов вектора скорости ветра и формирования информации о направлении и скорости ветра, соответствующих измеренным значениям времени прохождения акустических колебаний в четырех различных направлениях между парами пьезоэлектрических преобразователей (АМЯ2.702.092 РЭ Руководство по эксплуатации. Автономный переносной метеорологический комплекс для научных исследований в экспедиционных условиях «ЭКСМЕ-ТЕО-01». - Томск, 2007. - С. 7-12; патент RU 2319987, МПК G01W 1/02 (2006.01)).
Основным недостатком описанного устройства является низкая надежность работы вследствие сложной конструкции и большого числа датчиков.
Более простую конструкцию имеет акустический анемометр, содержащий три пары датчиков, связанных с блоком формирования и приема сигнала, подключенным к управляющему его работой и обрабатывающему результаты измерений микропроцессору. Три пары датчиков расположены на трех взаимно перпендикулярных осях, соответствующих декартовым координатам, что позволяет измерять скорость перемещения воздушных масс в трех взаимно перпендикулярных направлениях (Quaranta A Alberigi, Aprilesi G С, De Cicco G and Taroni A. A microprocessor based, three axes, ultrasonic anemometer / A Alberigi Quaranta. G С Aprilesi, G De Cicco, A Taroni // J. Phys. E: Sci. Instrum. - 1985. - Vol 18. - C. 384-387 / [Электронный ресурс]. - Режим доступа: http://iopscience.iop.org/article/10.1088/0022-3735/18/5/004/meta (дата обращения: 23.01.2018)).
Однако, наличие трех пар датчиков усложняет конструкцию устройства.
Наиболее близким по технической сущности к заявленному изобретению (прототипом) является ультразвуковой акустический анемометр, содержащий четыре пьезоэлектрических преобразователя для измерения трех ортогональных компонентов вектора скорости ветра, закрепленные на каркасе в вершинах основания и вершине призмы с основанием в виде равностороннего треугольника и подключенные к блоку формирования сигнала, приема и обработки данных, выход которого, в свою очередь, подключен ко входу блока сбора информации. При этом оси пьезоэлектрических преобразователей, которые перпендикулярны их поверхностям, излучающим или принимающим акустический сигнал, направлены в середину линии, опущенной из вершины призмы в центр ее основания. Таким образом, в частном случае, при выполнении призмы в форме тетраэдра, оси всех пьезоэлектрических преобразователей будут направлены в его центр. Анемометр формирует информацию о направлении и скорости ветра, соответствующую измеренным значениям времени прохождения ультразвуковых сигналов в трех различных направлениях (патент FR 2628216(А1), МПК G01P 13/02, G01P 5/18, G01P 5/24).
Основным недостатком ультразвукового акустического анемометра является пониженная точность измерения скорости и направления перемещения воздушного потока вследствие низкой помехозащищенности, поскольку пересечение осей пьезоэлектрических преобразователей в центре призмы приводит к уменьшению интенсивности излучаемого и регистрируемого сигнала за счет того, что направление излучения и приема сигнала не совпадает с направлением максимума диаграммы направленности.
Техническая проблема, решение которой обеспечивается при осуществлении изобретения, заключается в создании ультразвукового акустического анемометра, позволяющего повысить точность измерения скорости и направления перемещения воздушного потока путем повышения интенсивности акустических сигналов, доходящих до воспринимающих их пьезоэлектрических преобразователей.
Решение этой технической проблемы достигается тем, что в ультразвуковом акустическом анемометре, содержащем пьезоэлектрические преобразователи, закрепленные на каркасе в вершинах призмы с основанием в виде равностороннего треугольника и подключенные к блоку формирования сигнала, приема и обработки данных, выход которого, в свою очередь, подключен ко входу блока сбора информации, при этом ось пьезоэлектрического преобразователя, закрепленного в вершине призмы, направлена в центр основания призмы, согласно изобретению оси пьезоэлектрических преобразователей, закрепленных в вершинах основания призмы, направлены в сторону пьезоэлектрического преобразователя, закрепленного в вершине призмы.
Повышение точности измерения скорости и направления перемещения воздушного потока объясняется тем, что оси расположенных в основании пирамиды пьезоэлектрических преобразователей смещены не в ее центр, а направлены в сторону пьезоэлектрического преобразователя, расположенного в вершине пирамиды, за счет чего повышается интенсивность акустических волн, испущенных ими и достигающих чувствительной поверхности этого пьезоэлектрического преобразователя. Аналогично, повышается и интенсивность акустических волн, излученных пьезоэлектрическими преобразователями, расположенных в вершинах основания пирамиды и достигающих чувствительной поверхности пьезоэлектрических преобразователей, расположенных в основании пирамиды. В результате за счет повышения интенсивности воспринимаемого пьезоэлектрическими преобразователями акустического сигнала повышается отношение сигнал/шум и уменьшается влияние других помех, которые могут воздействовать на пьезоэлектрические преобразователи. А это в свою очередь повышает точность определения времени прохождения акустической волны между пьезоэлектрическими преобразователями и в конечном итоге повышает точность измерения скорости и направления движения воздушных масс.
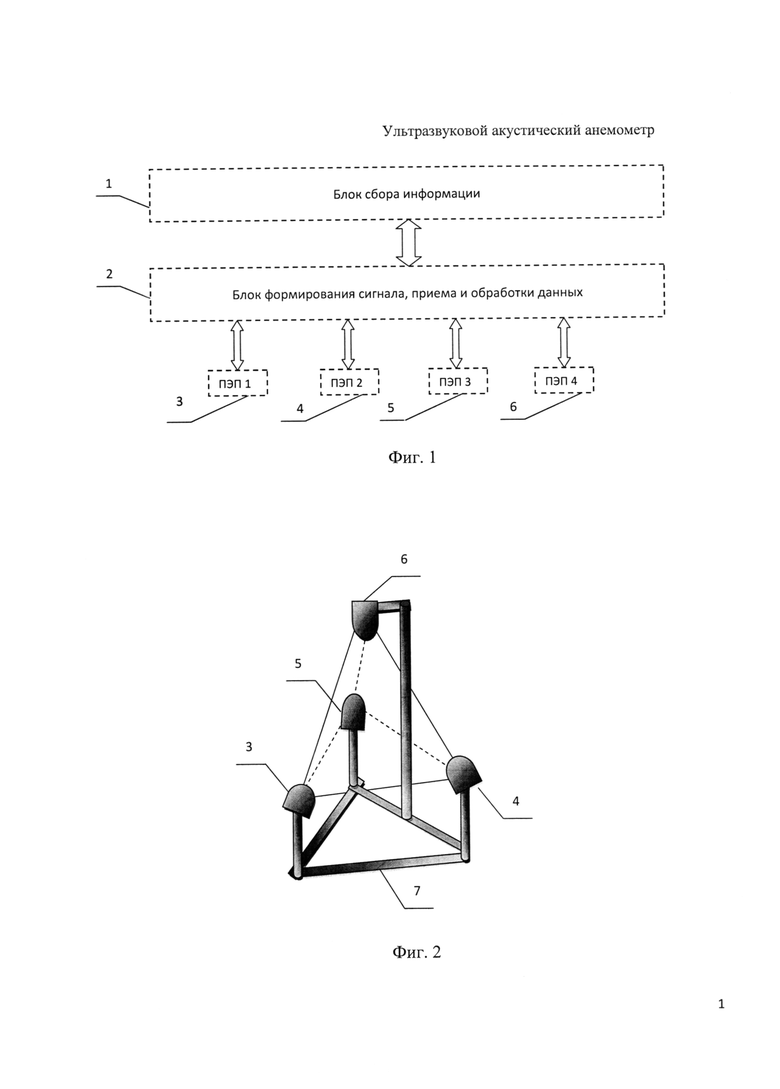
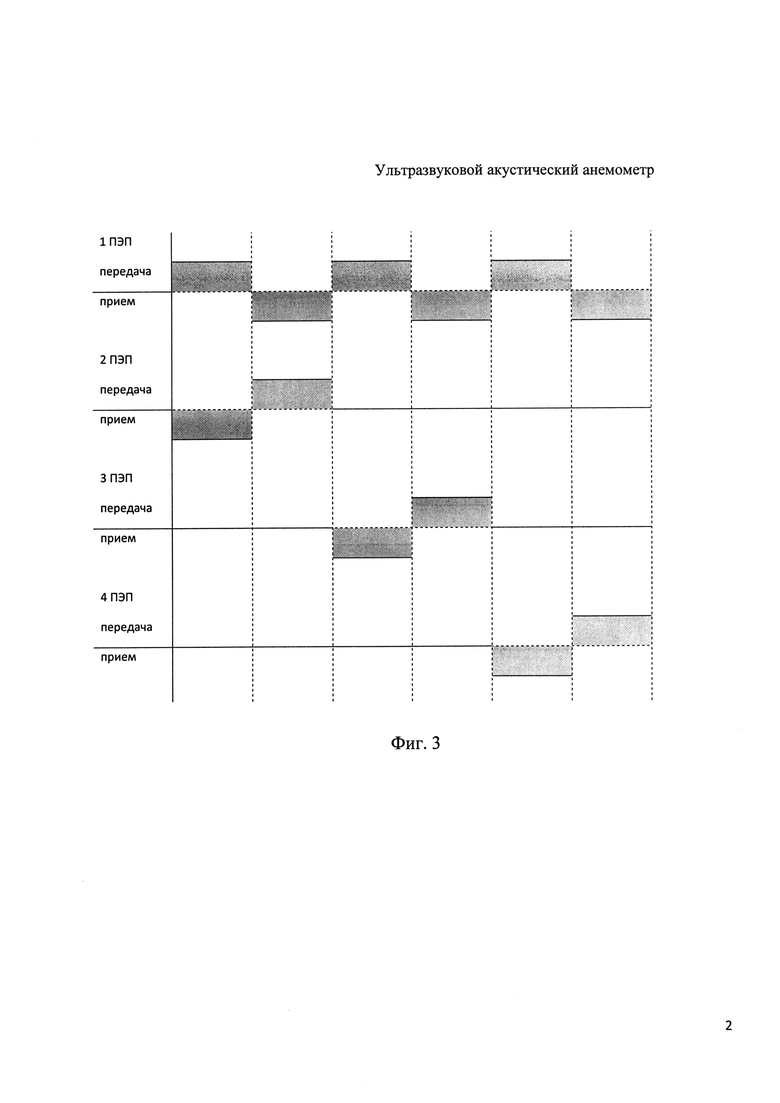
Предлагаемое изобретение поясняется чертежом, где на фиг. 1 представлена структурная схема ультразвукового акустического анемометра; на фиг. 2 изображено конструктивное исполнения крепления пьезоэлектрических преобразователей анемометра; на фиг. 3 приведена временная диаграмма работы пьезоэлектрических преобразователей.
Кроме того, на чертеже аббревиатурой ПЭП обозначены пьезоэлектрические преобразователи.
Ультразвуковой акустический анемометр содержит блок 1 сбора информации, блок 2 формирования сигнала, приема и обработки данных, пьезоэлектрические преобразователи 3 (ПЭП 1), 4 (ПЭП 2), 5 (ПЭП 3), 6 (ПЭП 4), закрепленные на каркасе 7 в вершинах основания и вершине призмы с основанием в виде равностороннего треугольника. Пьезоэлектрические преобразователи 3 (ПЭП 1), 4 (ПЭП 2), 5 (ПЭП 3), 6 (ПЭП 4) подключены к четырем группам выводов блока 2 формирования сигнала, приема и обработки данных, выход которого подключен ко входу блока 1 сбора информации. Все выводы блока 2 формирования сигнала, приема и обработки данных, подключенные к пьезоэлектрическим преобразователям 3 (ПЭП 1), 4 (ПЭП 2), 5 (ПЭП 3), 6 (ПЭП 4), могут выполнять функцию как входа, так и выхода, в зависимости от того, находится ли пьезоэлектрический преобразователь в режиме приема или излучения акустического сигнала. Если блок 1 сбора информации дополнительно выполняет функцию управляющего устройства, то линии связи между ним и блоком 2 формирования сигнала, приема и обработки данных могут также быть двунаправленными.
Ось пьезоэлектрического преобразователя 6 (ПЭП 4), закрепленного на каркасе 7 в вершине призмы, направлена в центр основания призмы. Оси пьезоэлектрических преобразователей 3 (ПЭП 1), 4 (ПЭП 2) и 5 (ПЭП 3), закрепленных на каркасе 7 в вершинах основания призмы, направлены в сторону пьезоэлектрического преобразователя 6 (ПЭП 4), закрепленного на каркасе 7 в вершине призмы.
Ультразвуковой акустический анемометр работает следующим образом.
Измерительный цикл начинается с того, что блок 2 формирования сигнала, приема и обработки данных формирует на выходе периодический электрический сигнал прямоугольной формы, который поступает на размещенный в вершине призмы пьезоэлектрический преобразователь 6 (ПЭП 4), ось излучения и приема акустических сигналов которого направлена в центр основания призмы. Оси трех остальных пьезоэлектрических преобразователей 3 (ПЭП 1), 4 (ПЭП 2), 5 (ПЭП 3), перпендикулярные плоскости излучения и приема колебаний, направлены в сторону пьезоэлектрического преобразователя 6 (ПЭП 4).
Пьезоэлектрический преобразователь 6 (ПЭП 4) преобразовывает поступающий на него от блока 2 формирования сигнала, приема и обработки данных электрический сигнал в акустические колебания ультразвуковой частоты. Акустическая волна достигает лежащие в основании призмы пьезоэлектрические преобразователи 3 (ПЭП 1), 4 (ПЭП 2), 5 (ПЭП 3). в том числе и пьезоэлектрический преобразователь 4 (ПЭП 2). Пьезоэлектрический преобразователь 4 (ПЭП 2) преобразовывает акустические колебания в электрический сигнал. Электрический сигнал поступает на вход блока 2 формирования сигнала, приема и обработки данных. При этом фиксируется и запоминается во внутренней памяти блока 2 формирования сигнала, приема и обработки данных время от начала излучения акустической волны пьезоэлектрическим преобразователем 6 (ПЭП 4) до ее достижения пьезоэлектрического преобразователя 4 (ПЭП 2). После регистрации этого времени блок 2 формирования сигнала, приема и обработки данных формирует на выходе периодический электрический сигнал ультразвуковой частоты прямоугольной формы, который поступает уже на пьезоэлектрический преобразователь 4 (ПЭП 2), переходящий в режим излучения акустических сигналов. Пьезоэлектрический преобразователь 4 (ПЭП 2) преобразовывает этот электрический сигнал в акустические колебания. Посланная им акустическая волна достигает пьезоэлектрического преобразователя 6 (ПЭП 4). При этом пьезоэлектрический преобразователь 6 (ПЭП 4) переводится блоком 2 формирования сигнала, приема и обработки данных в режим приема сигналов и преобразовывает доходящие до него акустические колебания в электрический сигнал. Зарегистрированный пьезоэлектрическим преобразователем 6 (ПЭП 4) посланный от пьезоэлектрического преобразователя 4 (ПЭП 2) акустический сигнал поступает на вход блока 2 формирования сигнала, приема и обработки данных, в котором фиксируется и запоминается во внутренней памяти блока 2 формирования сигнала, приема и передачи данных время от начала излучения акустической волны пьезоэлектрическим преобразователем 4 (ПЭП) 2 до ее достижения пьезоэлектрического преобразователя 6 (ПЭП 4).
Процесс формирования электрического сигнала, приема акустической волны и запоминания времени движения акустической волны от одного пьезоэлектрического преобразователя к другому пьезоэлектрическому преобразователю повторяется для пар пьезоэлектрический преобразователь 6 (ПЭП 4) и пьезоэлектрический преобразователь 5 (ПЭП 3), пьезоэлектрический преобразователь 6 (ПЭП 4) и пьезоэлектрический преобразователь 3 (ПЭП 1). Реализация таких процессов осуществима благодаря возможности пьезоэлектрического преобразователя работать как в режиме излучения, так и приема акустической волны, а каждого из подключенных к нему входов/выходов блока 2 формирования сигнала, приема и обработки данных как передавать, так и принимать электрические сигналы. В показанной на фиг. 3. временной диаграмме последовательность режимов работы пьезоэлектрического преобразователя задана так, что за время полного цикла именно пьезоэлектрический преобразователь 6 (ПЭП 4) всегда является общим для каждой из трех пар, что является обязательным условием.
После измерения всех времен прохождения акустической волны между парами пьезоэлектрических преобразователей полученная информация передается в блок 1 сбора информации, который осуществляет расчет компонентов вектора скорости через известные значения расстояний между пьезоэлектрическими преобразователями и полученные им в процессе измерения времена распространения акустической волны в прямом и обратном направлениях между парами пьезоэлектрических преобразователей и осуществляет переход от базиса, определяемого лучами, проходящими через центры излучающих и принимающих акустический сигнал поверхностей пьезоэлектрических преобразователей, то есть ребер призмы, к ортогональному базису, осуществляя тем самым расчет значений проекций вектора в декартовых координатах. При вычисляется также расчет и модулей вектора скорости как в трехмерном пространстве, так и в двумерном пространстве, плоскость которого совпадает с основанием призмы.
Для такого пересчета можно воспользоваться матрицей перехода от одного базиса к другому, используя соотношения, известные в линейной алгебре (Режим доступа: http://procmem.ru/page/matrica-perehoda).
Таким образом, использование предложенного устройства позволяет повысить точность измерения скорости и направления перемещения воздушного потока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Анемометр-термометр ультразвуковой и способ компенсации искажений воздушного потока, вносимых каркасом анемометра-термометра | 2022 |
|
RU2801963C1 |
| Способ обнаружения питтинговой коррозии | 2019 |
|
RU2714868C1 |
| СФЕРИЧЕСКАЯ ГИДРОАКУСТИЧЕСКАЯ АНТЕННА | 2012 |
|
RU2515133C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2137120C1 |
| СПОСОБ ИМИТАЦИИ ДЕФЕКТОВ ПРИ УЛЬТРАЗВУКОВОМ КОНТРОЛЕ ИЗДЕЛИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2278377C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ ПЬЕЗОЭЛЕКТРИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2581082C1 |
| ПРОДОЛЬНО-ПОПЕРЕЧНЫЙ СПОСОБ РЕАЛИЗАЦИИ ЭХОЛОКАЦИОННОГО МЕТОДА УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЯ ПО ВСЕМУ СЕЧЕНИЮ | 2014 |
|
RU2585304C1 |
| Способ определения толщины стенки трубопровода в зоне дефекта типа "потеря металла" на основе статистической стабилизации параметров сигнала по данным ультразвуковой секции WM | 2018 |
|
RU2687846C1 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ТОЛЩИНОМЕТРИИ С ВЫСОКИМ РАЗРЕШЕНИЕМ | 2014 |
|
RU2554323C1 |
| УЛЬТРАЗВУКОВОЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ КАЧЕСТВА МЕТАЛЛА ТРУБОПРОВОДОВ | 1992 |
|
RU2042946C1 |
Использование: для измерения скорости и направления перемещения воздушных масс в трехмерном пространстве. Сущность изобретения заключается в том, что пьезоэлектрические преобразователи ультразвукового акустического анемометра закреплены на каркасе в вершинах основания и вершине призмы с основанием в виде равностороннего треугольника и подключены к блоку формирования сигнала, приема и обработки данных, выход которого, в свою очередь, подключен к входу блока сбора информации. Ось пьезоэлектрического преобразователя, закрепленного в вершине призмы, направлена в центр основания призмы, а оси пьезоэлектрических преобразователей, закрепленных в вершинах основания призмы, направлены в сторону пьезоэлектрического преобразователя, закрепленного в вершине призмы. Технический результат: обеспечение возможности повышения точности измерения скорости и направления перемещения воздушного потока. 3 ил.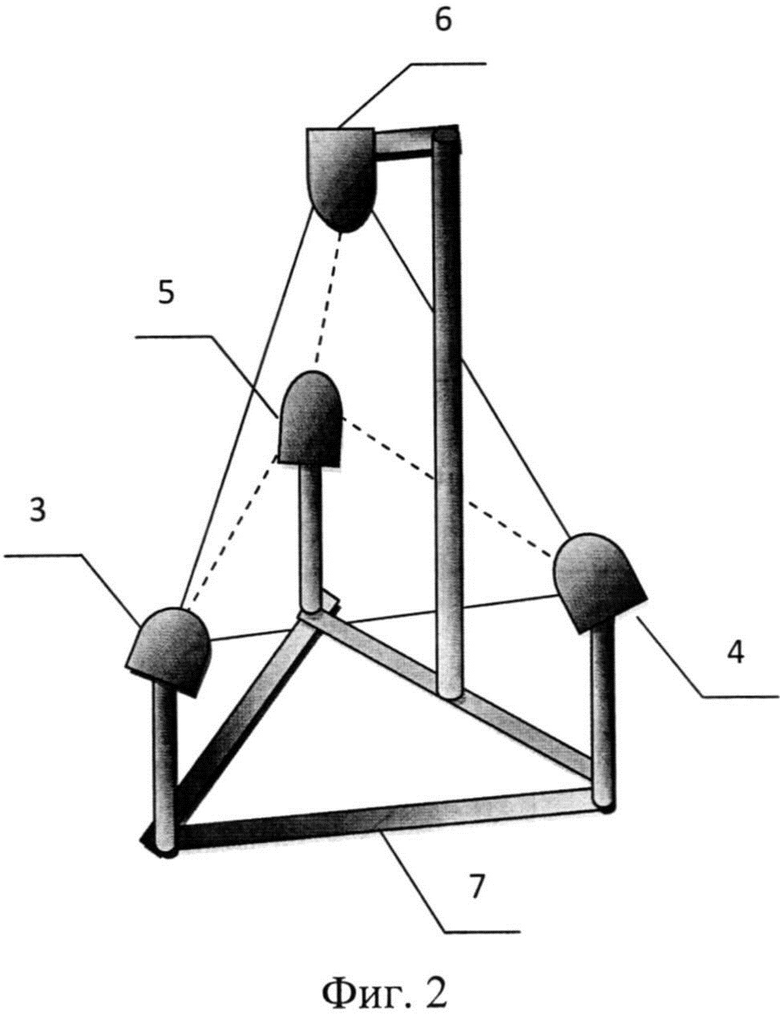
Ультразвуковой акустический анемометр, содержащий пьезоэлектрические преобразователи, закрепленные на каркасе в вершинах основания и вершине призмы с основанием в виде равностороннего треугольника и подключенные к блоку формирования сигнала, приема и обработки данных, выход которого, в свою очередь, подключен к входу блока сбора информации, при этом ось пьезоэлектрического преобразователя, закрепленного в вершине призмы, направлена в центр основания призмы, отличающийся тем, что оси пьезоэлектрических преобразователей, закрепленных в вершинах основания призмы, направлены в сторону пьезоэлектрического преобразователя, закрепленного в вершине призмы.
| Цифровой вычислительный синтезатор с частотной модуляцией | 2016 |
|
RU2628216C1 |
| ПРИБОР МЕТЕОРОЛОГИЧЕСКИЙ АВТОМАТИЗИРОВАННЫЙ | 2011 |
|
RU2466435C1 |
| Приспособление для обработки торцов корпусных деталей | 1961 |
|
SU147970A1 |
| Трехкомпонентный акустический анемометр | 1973 |
|
SU481837A1 |
| CN 204789618 U, 18.11.2015. | |||

