Область техники, к которой относится изобретение
Изобретение относится к технологии машиностроения, в частности к средствам для позиционирования объектов сложной формы в пространстве, и может быть использовано для сборки, контроля и измерений сложных пространственных конструкций, например, трубопроводов, ферм, стержневых конструкций и других составных изделий, требующих высокой точности позиционирования составных элементов.
Уровень техники
Из уровня техники известно большое количество средств для позиционирования объектов в пространстве.
В качестве наиболее близкого аналога выбрано известное средство позиционирования объектов в пространстве, раскрытое в патентном документе SU №1747866 (G01B 5/20, опубликовано 15.07.1992). Данное известное устройство содержит стойки, выполненные на базе стандартных штангрейсмусов. Устройство состоит из рамы основания с отверстиями на торцах и боковых стенках, базовых и концевых фиксаторов положения, а также подвижных вдоль рамы поперечных балок с опорными штангрейсмусами. Конструкция данного приспособления позволяет гибко и бесступенчато менять координаты узлов базирования с одновременным определением отклонений угловых и линейных координат элементов трубопровода. При работе элементы приспособления выставляются в соответствие с чертежом или шаблоном трубопровода, после чего на него устанавливается контролируемый трубопровод. Недостатком данного известного средства является высокая трудоемкость настройки приспособления. Кроме этого, в настоящее время, при переходе к безбумажным (цифровым) технологиям производства, применение шаблонов недопустимо.
Сущность изобретения
Задачей, на решение которой направлена настоящее изобретение, является создание средства, позволяющего позиционировать сложно-пространственные изделия или их компоненты с высокой точностью и производительностью.
В ходе решения данной задачи достигается совокупность технических результатов: уменьшение времени настройки устройства и собственно позиционирования; возможность исключить шаблоны для настройки устройства; повышение универсальности и расширение сферы применения; возможность автоматизации настройки и компьютеризации позиционирования.
Данная совокупность технических результатов достигается тем, что способ позиционирования объектов в пространстве состоит в том, что:
- в базовых отверстиях координатного стола устанавливают необходимое количество регулируемых стоек, удерживающих позиционируемый объект, при этом каждая из стоек содержит модули углового и/или прямолинейного перемещения, а также элемент для удержания объекта;
- устанавливают на каждом упомянутом модуле стойки метку, позволяющую определять ее положение в пространстве с помощью средств бесконтактных измерений;
- создают цифровой прототип потребного расположения в пространстве позиционируемого объекта, представляющий собой трехмерную пространственную модель, включающую модель самого объекта/объектов, стоек, координатного стола;
- используя упомянутый цифровой прототип выводят на экран визуальную информацию о потребном расположении позиционируемого объекта;
- определяют положение каждой упомянутой метки с помощью средств бесконтактных измерений;
- производят настройку положения каждого упомянутого модуля стойки, совмещая реальное положение каждой метки, установленной на модуле, с положением, заданным в цифровом прототипе. Совмещение производится с использованием бесконтактной системы измерения. Текущее и требуемое положение метки отображается для оператора на средстве визуализации, например, на дисплее, либо на экране очков дополненной реальности.
Указанная совокупность технических результатов достигается также тем, что система для позиционирования объектов в пространстве содержит:
- координатный стол с базовыми отверстиями для установки стоек, причем отверстия могут быть любой формы включая паз;
- основание с установленной в нем стойкой, при этом в основании размещается механизм прямолинейного перемещения стойки и фиксатор ее положения;
- по крайней мере, одну стойку, имеющую сменный элемент для удержания объекта, связанный со стойкой посредством, по крайней мере, одного соединительного модуля, выбранного из группы: модуль углового перемещения, модуль прямолинейного перемещения;
- каждый модуль выполнен с возможностью регулировки перемещения. При этом он может быть выполнен с возможностью как грубой так и точной регулировки перемещения, либо с возможностью только грубой либо только точной регулировки;
- на модулях установлены метки, позволяющие определять его положение в пространстве с помощью средств бесконтактных измерений. Метки могут быть установлены на каждом модуле или на отдельных выбранных оператором модулях;
- система снабжена средствами бесконтактных измерений положения каждого модуля и средствами визуализации, например, экраном, либо очками с встроенным дисплеем для визуализации информации о положении позиционируемого объекта.
Отличительной особенностью данного изобретения является то, что используются сменные модули прямолинейного и углового перемещений, способные соединяться между собой и с элементом для удержания объекта для образования устройства необходимой конфигурации. Размещенные на модулях метки позволяют определять их положение в пространстве и сравнивать его с положением соответствующих точек цифровой модели (прототипа) размещения в пространстве позиционируемого объекта.
Краткое описание фигур чертежей
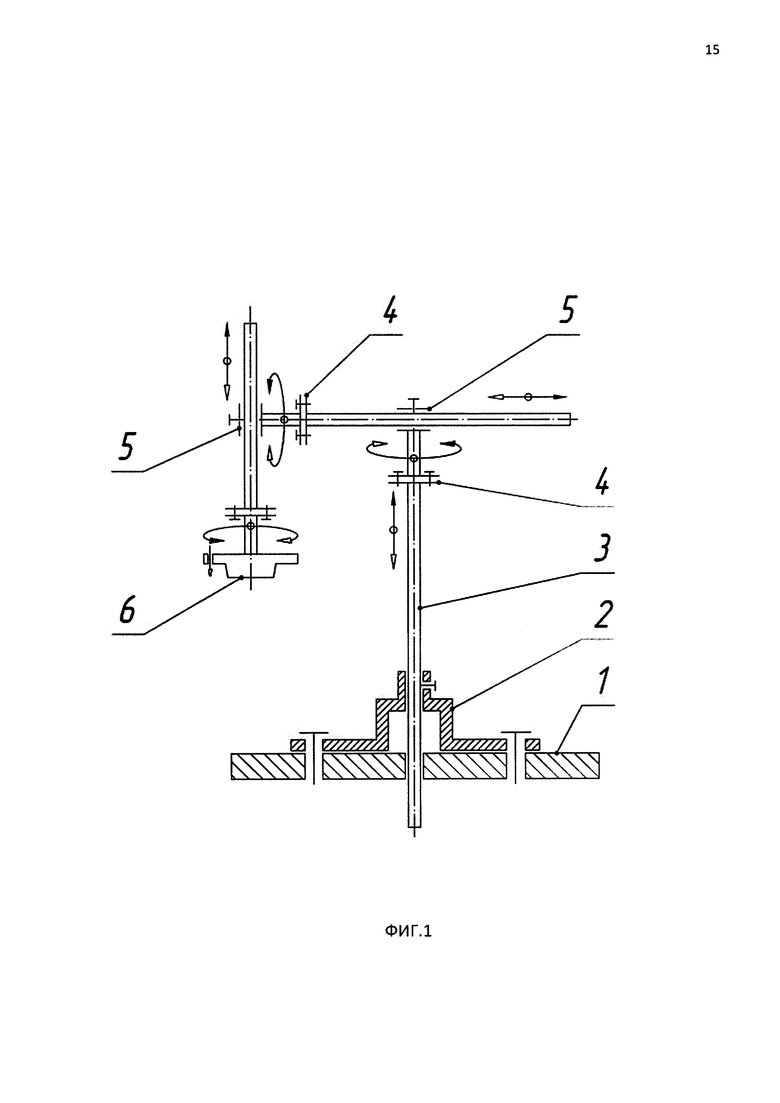
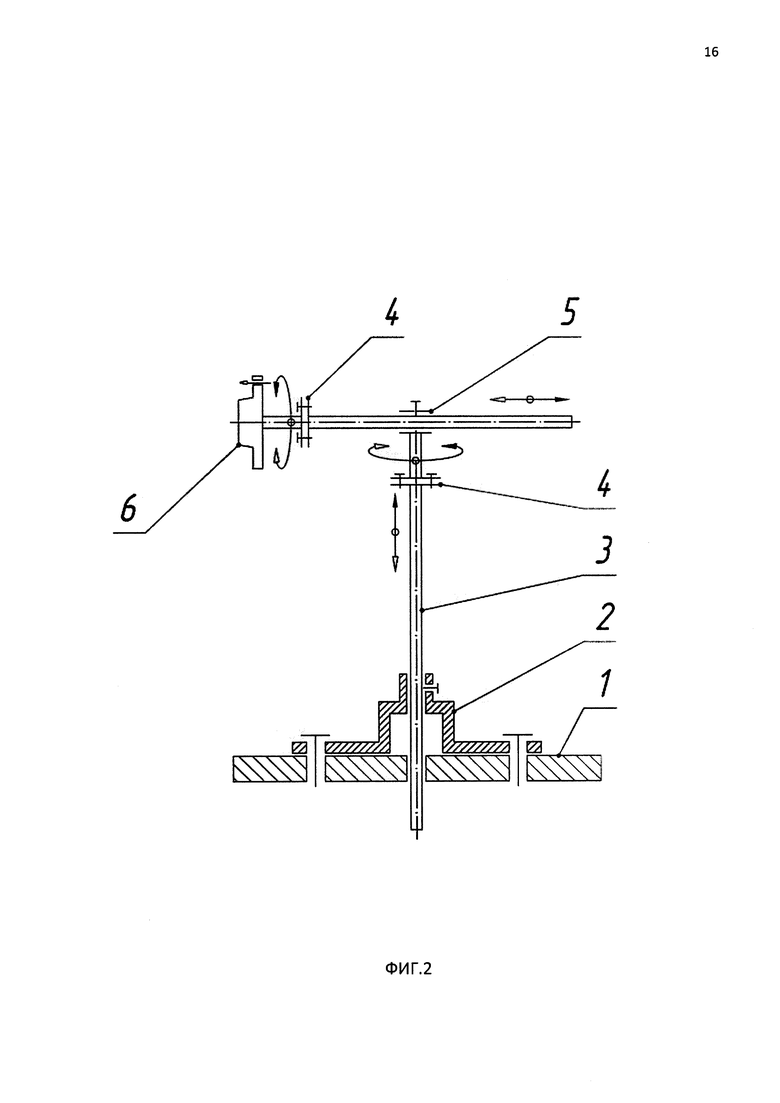
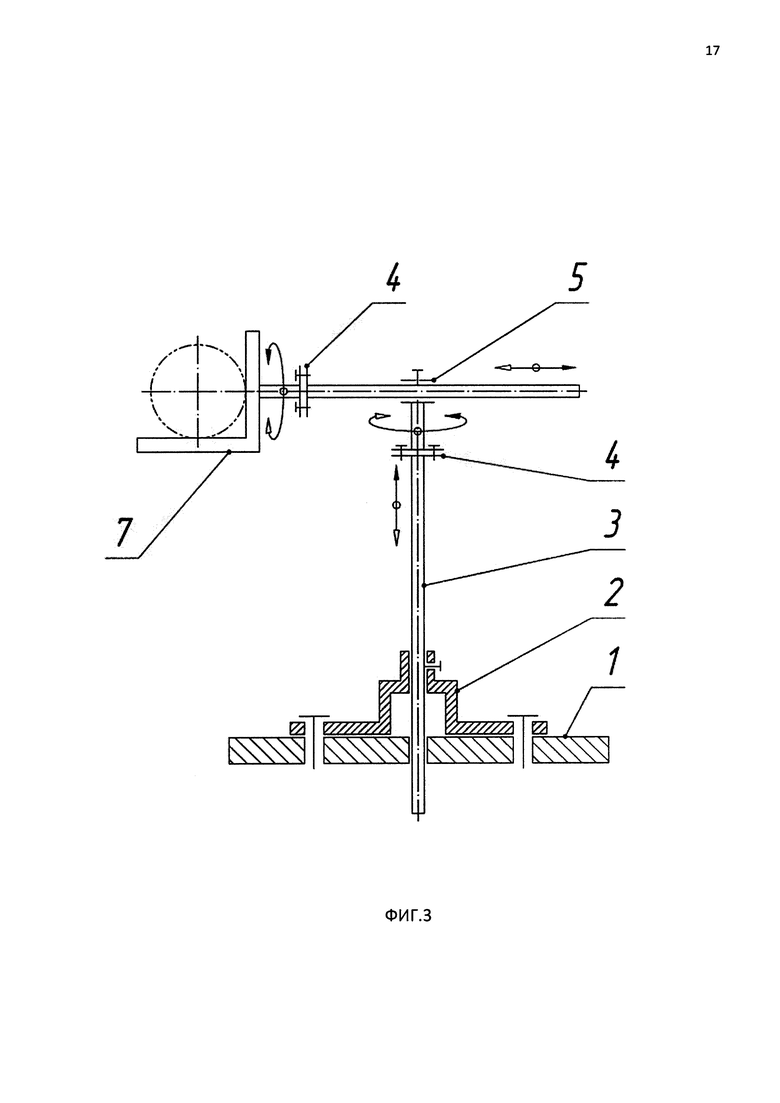
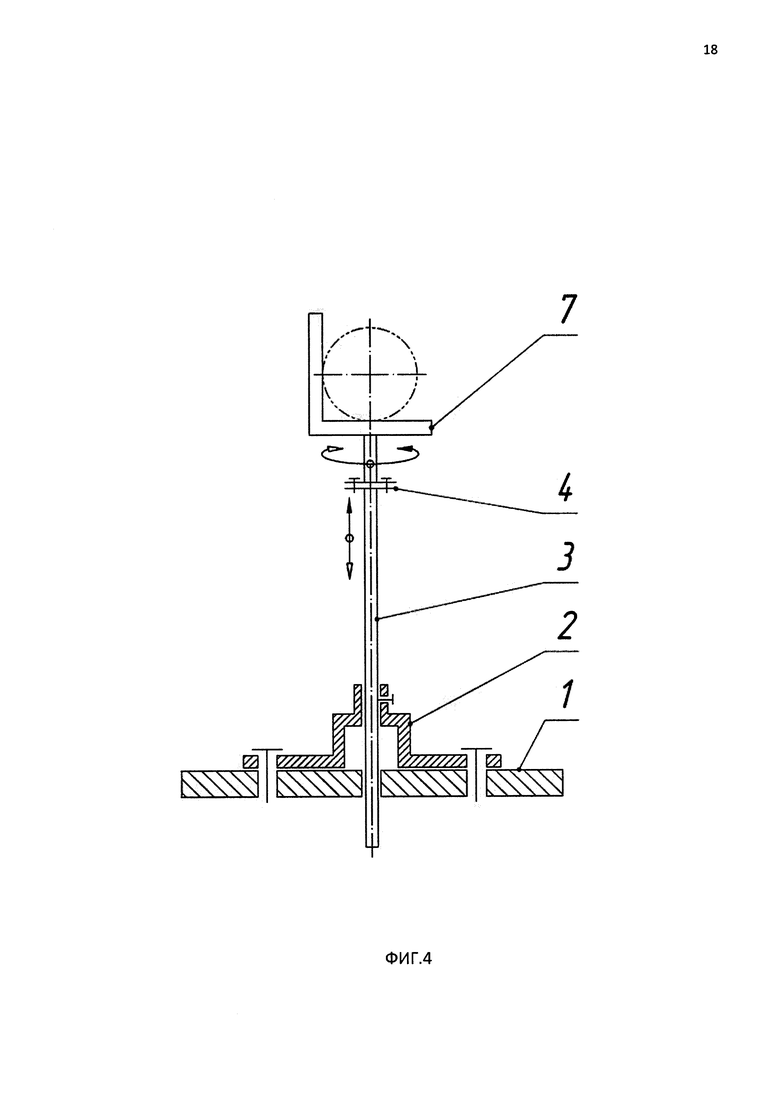
На ФИГ. 1 - ФИГ. 4 показаны конфигурации стоек при различном сочетании модулей.
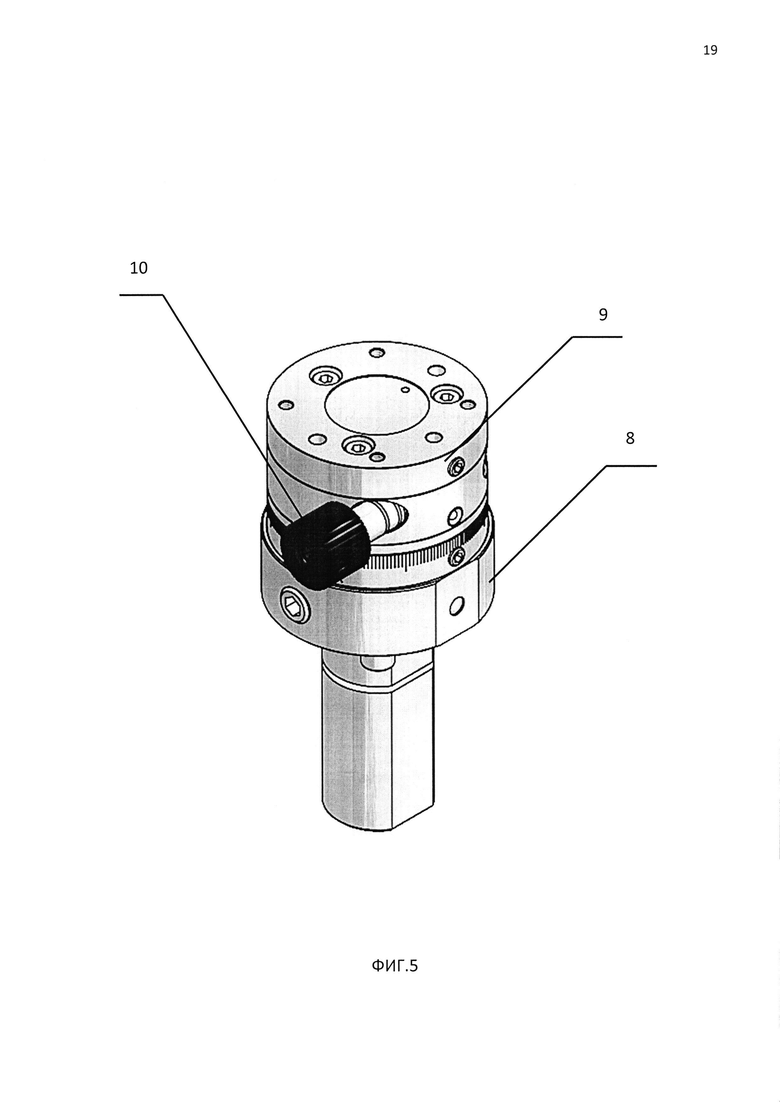
На ФИГ. 5 показан общий вид модуля угловых перемещений.
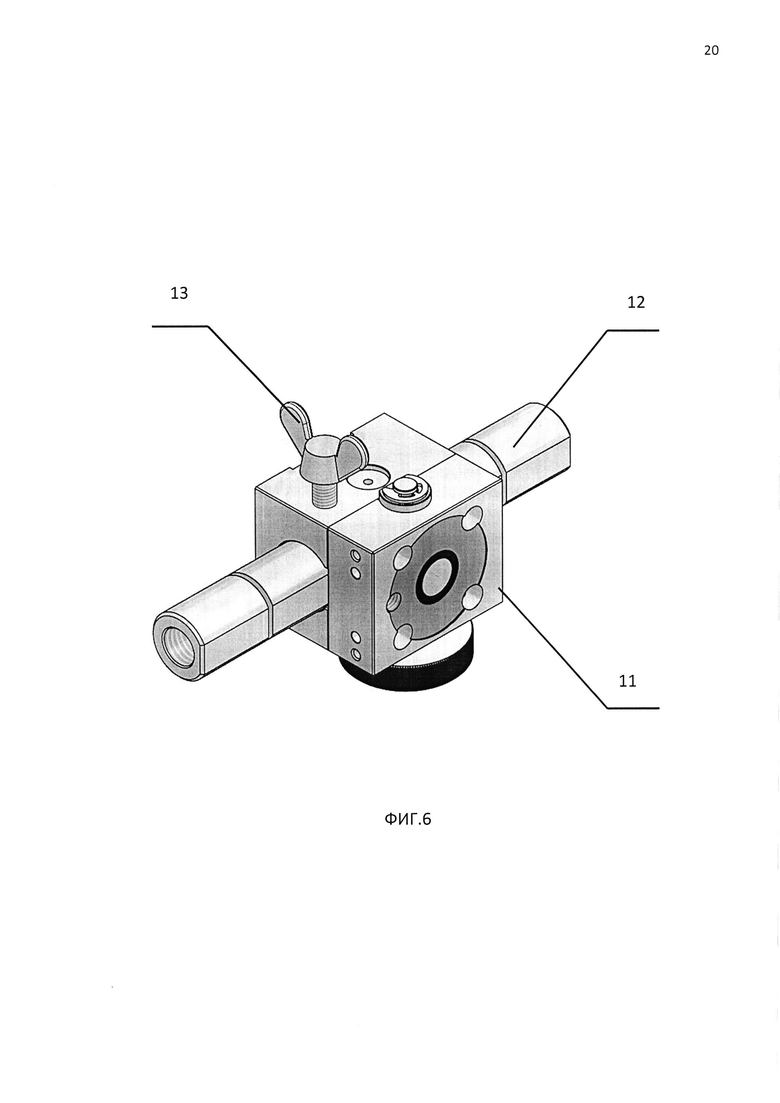
На ФИГ. 6 показан общий вид модуля прямолинейных перемещений.
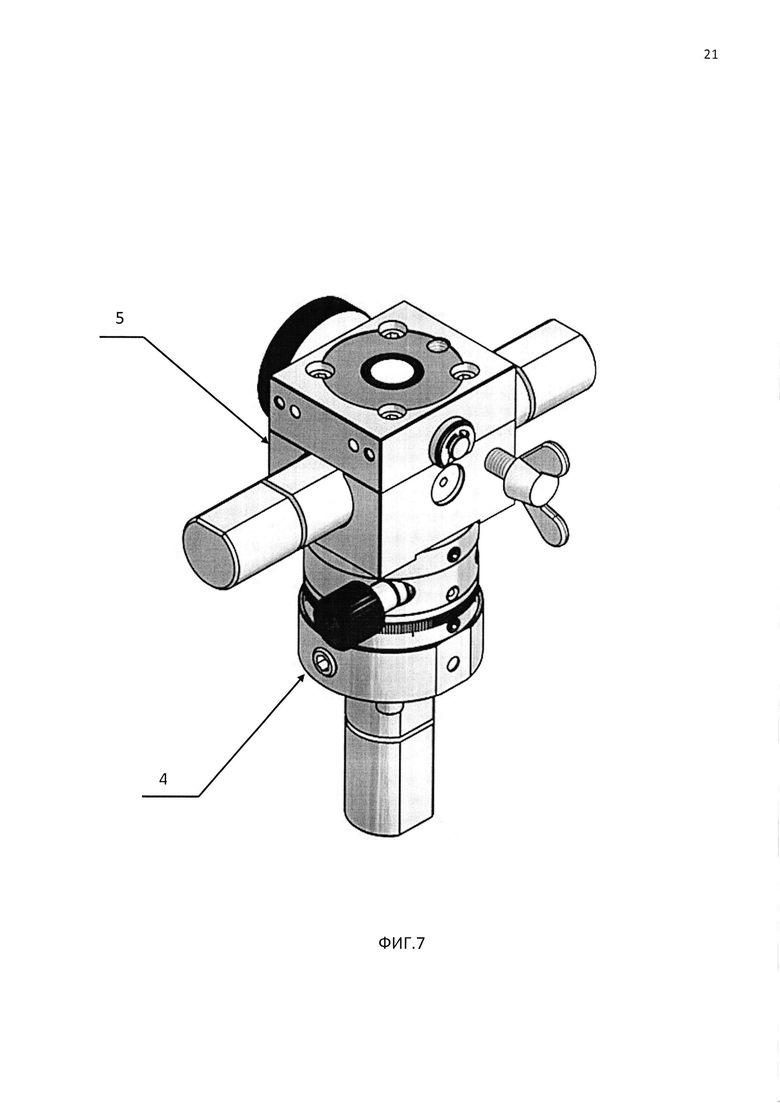
На ФИГ. 7 показана сборка модуля угловых перемещений и модуля прямолинейных перемещений.
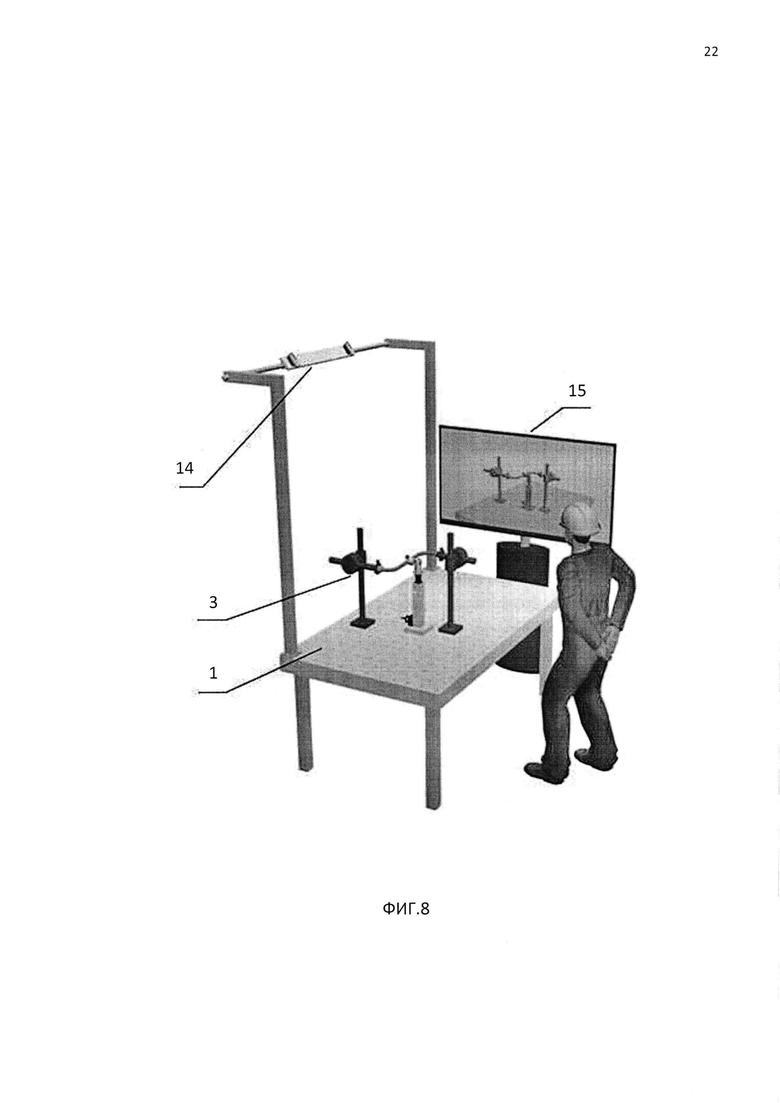
На ФИГ. 8 показана система в сборе.
Осуществление изобретения
Система для позиционирования объекта в пространстве содержит координатный стол 1 с базовыми отверстиями для установки стоек 3. Стойка 3 устанавливается в основание 2 с возможностью настройки по высоте. В этом случае основание 2 представляет собой модуль, в котором размещается механизм прямолинейного перемещения стойки 3 и фиксатор ее положения. Основание 2 с установленной в нем стойкой 3 закрепляется в базовом отверстии координатного стола 1 или, в качестве альтернативы, на любой иной базовой конструкции (например, сборочного стенда), где необходимо осуществить позиционирование объекта.
Крепление стойки 3 в основании 2 и само основание 2 могут быть выполнены любым известным способом, например, в виде конуса Морзе. Механизм прямолинейного перемещения стойки и фиксатор могут также быть выполнены любым известным способом, например, в виде пары шестеренка-зубчатая рейка или винт-гайка.
Стойка 3 содержит сменный элемент для удержания позиционируемого объекта. Сменный элемент для удержания объекта может быть выполнен в виде средства 6, исключающего степени свободы у объекта. В качестве элемента для удержания могут использоваться патроны различных типов (трехкулачковые, четырехкулачковые), грибовидные фланцы, центрирующие конические упоры. Выбор элемента для удержания определяется конструкцией позиционируемого объекта.
В случае позиционирования объекта типа «круглая труба» могут применяться грибовидные фланцы или ступенчатые диски. При этом труба фиксируется от перемещения в осевом направлении упором торца трубы в грибовидный выступ фланца или ступенчатый переход диска, а перемещения в радиальном направлении ограничиваются тем, что труба одевается внутренним диаметром на выступ фланца или диска меньшего диаметра. Также могут применяться центрирующие конические упоры, при этом упор центрируется по внутреннему диаметру трубы.
При работе с профильной трубой можно использовать все фиксирующие элементы, которые используются для работы с круглой трубой с поправкой на сечение трубы, т.е. упоры и фланцы повторяют профильное сечение трубы или имеют внутренние непараллельные контактные площадки, вместо трехкулачкового патрона используется четырехкулачковый.
Для фиксации других элементов металлоконструкций типа «рамы» и «фермы», таких как уголок, швеллер или тавр, необходимо использовать упорные элементы, ограничивающие их перемещение по всем координатам - плиты с закрепленными на них упорами, пальцами или профильными накладками.
В зависимости от поставленных задач элемент для удержания объекта может быть выполнен в виде средства 7, допускающего перемещение объекта по некоторым степеням свободы. В качестве таких удерживающих средств могут использоваться различные ложементы, призмы, прямоугольные упоры или угольники.
При любом варианте исполнения, элемент для удержания объекта выполняется съемным с возможностью его замены, что позволяет расширить функциональные возможности устройства, упростить его настройку и уменьшить трудоемкость операций позиционирования.
Элемент для удержания позиционируемого объекта соединен со стойкой 3 посредством, по крайней мере, одного соединительного модуля, выбранного из группы: модуль 4 углового перемещения, модуль 5 прямолинейного перемещения.
Модуль 4 углового перемещения содержит основание 8, поворотное основание 9, приводимое в движение механизмом 10 углового перемещения и средства присоединения модуля к другим элементам (ФИГ. 5).
Модуль 5 прямолинейного перемещения содержит корпус 11, средства присоединения модуля к другим элементам, при этом в корпусе 11 размещается стержень 12, механизм его прямолинейного перемещения и фиксатор 13 положения стержня (ФИГ 6).
Каждый модуль 4 и 5 выполнен с возможностью грубой и точной регулировки, соответственно углового или прямолинейного, перемещения.
Модуль 4 углового перемещения, который может быть также назван поворотным или вращательным, может иметь цилиндрическую форму, как показано на ФИГ. 5. Он устанавливается одним из своих оснований 8, например, на вертикальную стойку 3 или стержень 12 модуля 5 прямолинейного перемещения. На верхнем торце модуля 4 углового перемещения размещается посадочный фланец с крепежными элементами для закрепления и базирования присоединяемого модуля 5 прямолинейного перемещения. Для присоединения к стойке 3 или стержню 12 модуль 4 комплектуется сменным фланцем нужного размера. Конструкция позволяет осуществлять точный поворот модуля 5, закрепленного на поворотном основании 9 модуля 4, относительно вертикальной стойки 3 или стержня, закрепленных со стороны основания 8. Для осуществления точного поворота в модуле 4 смонтирован механизм точного поворота на базе червяной пары или планетарного редуктора. При этом поворотное основание 9 связано блокировкой с червяным колесом или водилом планерного редуктора. При необходимости ускоренного поворота (грубой настройки) поворотное основание 9 разблокируется от червячного колеса или водила, после чего вручную поворачивается относительно основания 8 модуля 4.
В модуле 5 прямолинейного перемещения производится перемещение стержня 12 вдоль его оси без возможности его поворота. Стержень 12 может иметь круглое сечение с выбранной по всей длине лыской, как показано на ФИГ. 6. Базовым элементом модуля 5 является корпус 11, в частности прямоугольной формы. Внутри корпуса 11 установлен механизм прямолинейного перемещения и башмак, который при совмещении с лыской направляющей обеспечивает ее фиксацию от поворота и создает необходимый натяг в радиальном направлении. В механизме прямолинейного перемещения фрикционного типа или типа «шестерня - зубчатая рейка» перемещение производится вращением валика или шестерни совмещенного с маховиком. В корпусе 11 предусмотрен стопорный винт 13 для зажима стержня 12 в необходимом положении. На корпусе 11, параллельно оси движения стержня, предусмотрен присоединительный фланец с крепежными элементами для присоединения корпуса 11 к другому модулю или элементу устройства.
На каждом модуле 4 и 5 установлена идентификационная метка, позволяющая определять положение соответствующего модуля в пространстве с помощью бесконтактного метода измерений.
Отличительной особенностью конструкции устройства по настоящему изобретению является размещение на модулях 4 и 5 (в качестве одного из вариантов осуществления метки могут устанавливаться на основании 2 стойки 3 и элементе для удержания позиционируемого объекта) сменных идентификационных меток, которые позволяют отслеживать положение каждого модуля в пространстве при помощи бесконтактных методов измерения - фотометрических, фотограмметрических, оптико-электронных, лазерных или других. В зависимости от использованного метода выбирается тип идентификационной метки. Каждой метке присваивается уникальный номер в используемой системе измерений.
Используемые метки могут имеют унифицированные посадочные поверхности в виде цилиндрического пальца с ограничительным фланцем. При таком исполнении метки устанавливаются в основание 2 стойки 3 или модули 4, 5 устройства в специальные гнезда с центральным отверстием для пальца и цилиндрическим углублением вокруг него. При установке метки в гнездо ее утапливают в цилиндрическое углубление до упора. Возможны и иные способы установки меток на элементы устройства.
Устройство снабжено средствами 14 бесконтактного измерения положения каждого модуля. Выбор данных средством определяется типом применяемой идентификационной метки. Идентификационная метка и средства 14 бесконтактного измерения образуют бесконтактную контрольно-измерительную систему, которая может быть выполнена любым известным образом.
Система снабжена экраном 15, на который выводится информация о позиционировании объекта. Так, на экран 15 может выводится цифровая модель (прототип), наглядно показывающая какое положение в пространстве должен принять объект.
Применение метода бесконтактных измерений позволяет производить настройку положения элемента для удержания позиционируемого объекта с использованием цифрового прототипа изготавливаемого или контролируемого изделия (трубопровода, рамы, фермы и др.). Используя экран 15 с выводимой на него визуальной информацией, настройщик может производить настройку положения каждого модуля стойки до совмещения положения объекта в цифровом прототипе и измеряемого фактического положения объекта.
Система реализует следующий способ позиционирования объекта.
В базовых отверстиях координатного стола 1 устанавливают необходимое количество регулируемых стоек 3, удерживающих позиционируемый объект (как показано на ФИГ. 8). Каждая из стоек 3 содержит модули 4, 5 углового и/или прямолинейного перемещения, а также элемент 1 для удержания объекта.
Устанавливают на каждом упомянутом модуле 4, 5 стойки 3 метку, позволяющую определять положение модуля 4, 5 в пространстве с помощью средств бесконтактных измерений 14.
Создают цифровой прототип потребного расположения в пространстве позиционируемого объекта. Такой цифровой прототип представляет собой цифровой чертеж объекта и может быть выполнен в любом пригодном для этой цели компьютерном приложении (CAD программе, и др.).
Используя упомянутый цифровой прототип (трехмерную модель) выводят на экран 15 визуальную информацию о потребном расположении позиционируемого объекта.
Определяют положение каждого упомянутого модуля 4, 5 с помощью средств бесконтактных измерений 14.
Производят настройку положения каждого упомянутого модуля 4, 5 стойки 3, совмещая положение каждой метки, установленной на модуле, с изображенной на экране 15 соответствующей точкой цифрового прототипа.
Таким образом, предлагаемая конструкция системы в соответствии с настоящим изобретением обладает значительными преимуществами по сравнению с известными аналогами.
Модульная конструкция системы позволяет собирать различные ее варианты с необходимым количеством настраиваемых координат, что позволяет осуществлять удержание деталей собираемых конструкций любой сложности. Применение в модулях 4 и 5 грубой и точной настройки позволяет производить настройку конечного положения удерживаемых объектов за минимальное время и с необходимой точностью. Использование для удержания деталей собираемых конструкций сменных конечных элементов позволяет расширить функциональные возможности устройства. Использование в конструкции стойки быстросменных идентификационных (измерительных) меток, пространственные координаты которых могут быть измерены с необходимой точностью средствами бесконтактных измерений (фотограмметрическими, лазерными и др.), позволяют осуществить автоматизацию и компьютеризацию работы устройства. Возможность устанавливать стойку на широко распространенные столы с сеткой базовых отверстий расширяет область применения устройства.
Группа изобретений относится к технологии машиностроения. Система, реализующая способ для позиционирования объектов в пространстве, содержит: координатный стол с базовыми отверстиями для установки стоек; основание с установленной в нем стойкой, в основании размещается механизм прямолинейного перемещения стойки и фиксатор ее положения; стойку, имеющую сменный элемент для удержания объекта, связанный со стойкой посредством соединительного модуля, выбранного из группы: модуль углового перемещения, модуль прямолинейного перемещения. Каждый модуль выполнен с возможностью регулировки перемещения. На модуле установлена метка, позволяющая определять его положение в пространстве с помощью средств бесконтактных измерений. Система снабжена средствами бесконтактных измерений положения каждого модуля и средством визуализации для визуализации позиционируемого объекта и цифрового прототипа потребного расположения в пространстве позиционируемого объекта. Технический результат заключается в создании средства, обеспечивающего возможность позиционировать сложно-пространственные изделия или их компоненты с высокой точностью и производительностью. 2 н. и 7 з.п. ф-лы, 8 ил.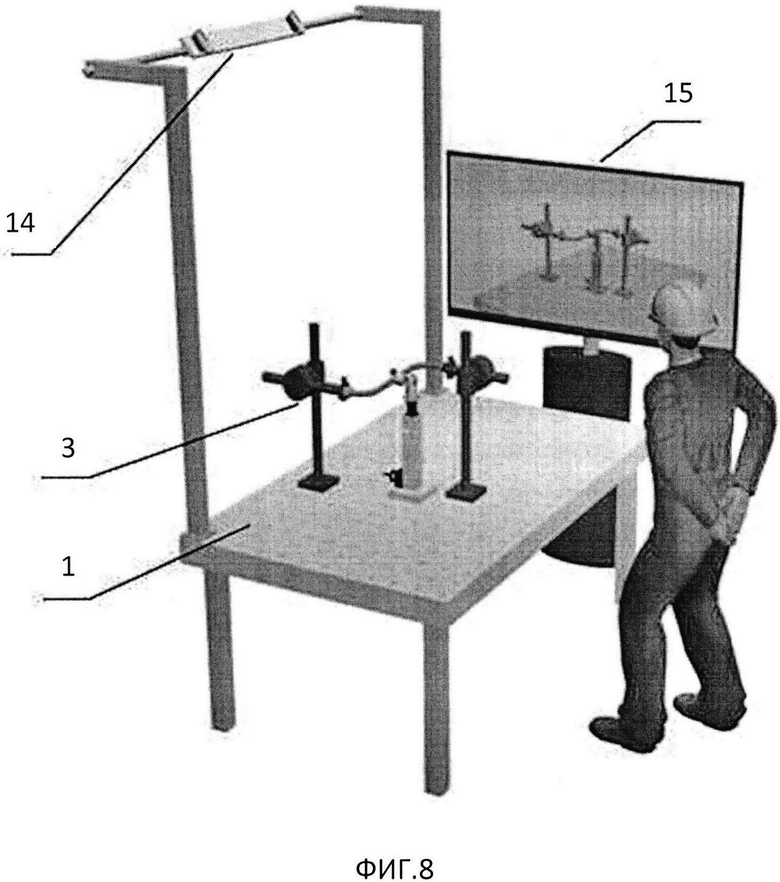
1. Система для позиционирования объектов в пространстве, содержащая
координатный стол с базовыми отверстиями для установки стоек;
основание с установленной в нем стойкой, при этом в основании размещается механизм прямолинейного перемещения стойки и фиксатор ее положения;
по крайней мере, одну стойку, имеющую сменный элемент для удержания объекта, связанный со стойкой посредством, по крайней мере, одного соединительного модуля, выбранного из группы: модуль углового перемещения, модуль прямолинейного перемещения;
каждый модуль выполнен с возможностью регулировки перемещения;
по крайней мере, на одном модуле установлена метка, позволяющая определять его положение в пространстве с помощью средств бесконтактных измерений;
система снабжена средствами бесконтактных измерений положения каждого модуля и средством визуализации для визуализации позиционируемого объекта и цифрового прототипа потребного расположения в пространстве позиционируемого объекта.
2. Система по п. 1, отличающаяся тем, что элемент для удержания объекта выполнен в виде средства, исключающего степени свободы у объекта.
3. Система по п. 2, отличающаяся тем, что элемент для удержания объекта выполнен в виде трехкулачкового или четырехкулачкового патрона.
4. Система по п. 1, отличающаяся тем, что элемент для удержания объекта выполнен в виде средства, допускающего перемещение объекта по некоторым степеням свободы.
5. Система по п. 4, отличающаяся тем, что элемент для удержания объекта выполнен в виде призмы, упора или угольника.
6. Система по п. 1, отличающаяся тем, что в качестве бесконтактного метода измерений используется фотометрия, фотограмметрия, оптико-электронные или лазерные измерения.
7. Система по п. 1, отличающаяся тем, что модуль прямолинейного перемещения содержит корпус, средства присоединения модуля к другим элементам, при этом в корпусе размещается стержень, механизм его прямолинейного перемещения и фиксатор положения стержня.
8. Система по п. 1, отличающаяся тем, что модуль углового перемещения содержит основание, поворотное основание, приводимое в движение механизмом углового перемещения, и средства присоединения модуля к другим элементам.
9. Способ позиционирования объектов в пространстве, состоящий в том, что
в базовых отверстиях координатного стола устанавливают необходимое количество регулируемых стоек, удерживающих позиционируемый объект, при этом каждая из стоек содержит модули углового и/или прямолинейного перемещения, а также элемент для удержания объекта;
устанавливают, по крайней мере, на одном из упомянутых модулей стойки метку, позволяющую определять положение модуля в пространстве с помощью средств бесконтактных измерений;
создают цифровой прототип потребного расположения в пространстве позиционируемого объекта;
используя упомянутый цифровой прототип, выводят на экран визуальную информацию о потребном расположении позиционируемого объекта;
определяют положение каждого упомянутого модуля с помощью средств бесконтактных измерений;
производят настройку положения каждого упомянутого модуля стойки, совмещая положение каждой метки, установленной на модуле, с изображенной на экране соответствующей точкой цифрового прототипа с использованием обратной связи от измерительной системы.
| СПОСОБ КОНТРОЛЯ ПРОФИЛЯ ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2263879C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ С РЕЗЬБОВОЙ ПОВЕРХНОСТЬЮ | 2008 |
|
RU2386925C2 |
| US 6085581 A, 11.07.2000 | |||
| Двухкоординатный стол | 1989 |
|
SU1773668A1 |

