Изобретение относится к области измерения магнитного момента (ММ) объекта, а именно к измерению составляющих мультипольных магнитных моментов объектов путем измерения составляющих магнитных полей в условиях наличия естественных и промышленных помех.
Для измерения магнитных моментов объекта существуют способы, которые основаны на определении магнитного момента объекта при его стационарном положении или движении по выбранному направлению. Часто объекты представляют собой сложные конструкции, насыщенные множеством механизмов и различного оборудования, что для обеспечения компенсации их полей вызывает необходимость определения магнитного момента не только суммарной дипольной составляющей объекта, но и моментов других порядков, а именно квадрупольного и октупольного.
Существует способ измерения магнитного момента крупногабаритного тела удлиненной формы (патент на изобретение РФ №2303792), основанный на результатах измерения индукции магнитного поля движущегося тела дифференциальным магнитометром и расстояния от датчиков измерения индукции магнитного поля до центра тела. Для определения магнитных моментов составляют расчетную магнитную модель и проводят моделирование измерений на компьютере, которые сравнивают с результатами натурных измерений. Для каждой модели объекта выбирают различные удаления и число продольных участков объекта.
Недостатками этого способа является невозможность точного измерения расстояния от магнитоизмерительных датчиков до центра магнитной массы объекта, а также и до его участков. Перебор исходных данных в расчетах не всегда обеспечивает сходимость результатов расчета с измеренными данными для всех точек магнитограммы (проходной характеристики). Кроме того данный способ позволяет определить только дипольный магнитный момент объекта.
Известен способ измерения магнитного момента объекта, например космического аппарата (патент на изобретение №2375721 - прототип), использующий пары измерителей, расположенных в трех взаимно ортогональных направлениях, с последующим измерением дипольных магнитных моментов в направлении каждой компоненты.
К недостаткам этого способа определения магнитного момента объекта следует отнести недостаточную его помехозащищенность, что оказывает влияние на погрешность измерений характеристик магнитного поля и соответственно магнитного момента. На результаты измерений оказывают влияние естественные вариации магнитного поля Земли, а также поля искусственного техногенного происхождения, вызванные, например, близостью ферромагнитных масс от мест проведения измерений, а также различными движущимися источниками (например, транспорт, лифт и т.д.). Компенсация или учет помех в способе-прототипе отсутствует.
Определение магнитных моментов объектов остаточного и индуцированного намагничений в прототипе требует проведения операций по измерению характеристик магнитного поля объекта в трех взаимно перпендикулярных плоскостях. Такая операция требует создания специализированных стендов с большой площадью и объемом, что также является существенным недостатком этого способа.
При определении магнитных моментов объекта, который эксплуатируется в различных широтных зонах, где естественное магнитное поле Земли имеет различные значения, оценка влияния изменений характеристик внешнего магнитного поля на значения магнитных моментов не предусмотрена.
Целью настоящего изобретения является повышение помехозащищенности и точности измерения составляющих мультипольных магнитных моментов объектов.
Способ измерения магнитных моментов объекта, включающий одновременное измерение уровней составляющих магнитной индукции в ортогональных направлениях во внешних точках относительно объекта с известными координатами относительно центра объекта, имеющий следующие отличия - для повышения помехозащищенности и точности определения моментов перед проведением измерений уровней составляющих индукции магнитных полей объекта компенсируют в объеме магнитоизмерительных датчиков составляющие индукции постоянного магнитного поля Земли, затем вводят объект в измерительную систему, соосно ориентируют оси объекта с осями измерительной системы и выполняют измерения разности одноименных составляющих индукции магнитного поля объекта между противоположно установленными датчиками измерительной системы, расположенных по окружности относительно продольной оси объекта, и вычисляют искомые значения составляющих магнитных моментов.
А также для измерения магнитных моментов объекта его размещают внутри многосекционной магнитоизмерительной системы с соосным расположением осей объекта с осями измерительной системы, измеряют одновременно разность составляющих индукции магнитного поля в каждой измерительной секции, плоскость которой совпадает с центром каждого сечения объекта, расположенных вдоль вытянутой оси объекта с известным расстоянием между ними, вычисляют последовательно значения магнитных моментов сечения, участков и объекта в целом.
А также для разделения остаточной и индуцированной составляющих магнитного момента объекта устанавливают вокруг объекта систему ортогональных контуров, соединенных с источником тока, выполняют измерения разности одноименных составляющих индукции магнитного поля объекта при положении объекта в магнитном поле, создаваемых контурами, с противоположным направлением относительно осей объекта.
А также для разделения остаточной и индуцированной составляющих магнитного момента объекта выполняют измерения разности одноименных составляющих индукции при положении осей объекта последовательно в противоположных направлениях относительно осей измерительной системы.
Таким образом, поставленная цель достигается за счет того, что в предлагаемом способе измерения магнитных моментов объекта магнитоизмерительные датчики устанавливают соосно на фиксированном расстоянии во взаимно противоположных точках вокруг объекта, включенных встречно, что обеспечивает исключение помех, одновременно воздействующих на оба датчика.
Схема расположения магнитоизмерительных датчиков относительно контролируемого объекта приведена на фиг. 1.
Способ измерения магнитных моментов предусматривает использование измерительных датчиков, расположенных в точках 1, 2, 3, 4, 5, 6, 7, 8 каждой секции на окружности с радиусом ro, центры которых расположены в плоскости, перпендикулярной оси х, на одинаковом расстоянии от оси х и обладают зеркальной симметрией относительно осей y и z.
Стрелками показаны положительные направления компонент датчиков. Система датчиков неподвижна. Предполагается, что вокруг объекта расставлено n-ое количество измерительных секций.
Помехозащищенные варианты формирования сигналов для каждой составляющей моментов для всего объекта определяются выражениями:

Используя приведенные выше схемы измерения, составляя соответствующие системы уравнений, можно по результатам измерения составляющих индукции магнитного поля объекта в различных измерительных секциях определить все необходимые неизвестные магнитные моменты.
Зная плотности распределения мультипольных моментов, легко находятся составляющие моментов n-участков:
 где i, j, k принимают значения х, y, z,
где i, j, k принимают значения х, y, z,
а также общие моменты, которые определяются выражением  где i=x, y, z.
где i=x, y, z.
Аналогичные выражения для определения моментов могут быть составлены при использовании четырех магнитоизмерительных датчиков 1, 2, 3, 4 или 5, 6, 7, 8.
Магнитные моменты объекта определяются по результатам измерения составляющих индукции магнитного поля магнитоизмерительными датчиками одной секции, в центре которой размещен объект.
Заявленный способ измерения магнитных моментов объекта осуществляется следующим образом. До ввода объекта в измерительную систему в объеме всех магнитоизмерительных датчиков компенсируют составляющие постоянного магнитного поля Земли. Вводят объект в измерительную систему и ориентируют его оси с осями измерительной системы. Перед проведением измерений и во время измерений на всех магнитоизмерительных датчиках компенсируют вариации магнитного поля Земли. Измеряют составляющие индукции магнитного поля с каждого магнитоизмерительного датчика, сигналы с которых передаются в вычислительное устройство, и обрабатывают их по предложенным схемам.
Для разделения остаточного и индуцированного магнитного момента объекта в компенсационные контуры 1, 2, 3 (фиг. 2), установленные вокруг объекта, последовательно подаются токи для создания индукции магнитного поля, обеспечивающие компенсацию индукции магнитного поля Земли в объеме нахождения объекта 5. Схема расположения компенсационных контуров приведена на фиг. 2, где контур в виде соленоида 1 компенсирует продольную составляющую магнитного поля, контур 2 компенсирует вертикальную составляющую, а контур 3 - поперечную оставляющую. Токи в компенсационные контуры подаются от источника тока 4. Для обеспечения изменения уровня и направления внешнего магнитного поля выставляют соответствующие токи в контурах. Все изменения внешнего магнитного поля автоматически компенсируются в объеме магнитоизмерительных датчиков. Для каждого фиксированного значения внешнего магнитного поля производятся измерения составляющих магнитного поля объекта, которые передаются в вычислительное устройство, где производятся вычисления магнитных моментов секций, участков и объекта в целом.
Предложенные выше схемы измерения и определения мультипольных магнитных моментов объекта с использованием помехозащищенных схем расстановки датчиков позволяют решать, практически, все задачи по определению магнитных моментов и соответственно магнитных полей объекта в окружающем его пространстве.
Зная распределения мультипольных магнитных моментов по длине объекта, можно определить эффективности отдельных секций, участков и общие магнитные моменты объекта.
Помехозащищенный способ измерения моментов объекта исключает влияние внешних магнитных помех естественного и искусственного происхождения на результаты измерения мультипольных магнитных моментов.
Предложенный способ измерения магнитных моментов объекта позволят исключить влияние методических погрешностей на определение дипольного магнитного момента и определять величину и положение источников мультипольных магнитных моментов.
Помехозащищенный способ измерения магнитных моментов объекта обеспечивает выделение участков объекта с характеристиками, требующими дополнительного внимания при выполнении процедур, связанных с размагничиванием объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЕРКИ МАГНИТОИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ | 2012 |
|
RU2503026C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ С ВОЗМОЖНОСТЬЮ КАЛИБРОВКИ В ПОЛЕВЫХ УСЛОВИЯХ | 2016 |
|
RU2620326C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИПОЛЬНОГО МАГНИТНОГО МОМЕНТА ОСТАТОЧНОЙ НАМАГНИЧЕННОСТИ И ТЕНЗОРА МАГНИТНОЙ ПОЛЯРИЗУЕМОСТИ ОБЪЕКТА И СТЕНД ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2744817C1 |
| БОРТОВОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 2008 |
|
RU2368872C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ТРЕХКОМПОНЕНТНОГО ДАТЧИКА МАГНИТОМЕТРА ОТНОСИТЕЛЬНО МЕРЫ МАГНИТНОГО МОМЕНТА | 2005 |
|
RU2290657C1 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ | 2012 |
|
RU2504763C1 |
| Способ автоматического размагничивания кораблей | 2018 |
|
RU2703765C1 |
| СПОСОБ РАЗДЕЛЬНОГО ИЗМЕРЕНИЯ ИНДУКТИВНОГО И ПОСТОЯННОГО МАГНИТНЫХ МОМЕНТОВ КРУПНОГАБАРИТНОГО ФЕРРОМАГНИТНОГО ТЕЛА УДЛИНЕННОЙ ФОРМЫ | 2005 |
|
RU2293345C1 |
| СПОСОБ ЛОКАЛИЗАЦИИ МАГНИТНОГО ДИПОЛЯ | 2010 |
|
RU2456642C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПРИРАЩЕНИЯ ИНДУКЦИИ МАГНИТНОГО ПОЛЯ ТРЕХКОМПОНЕНТНЫМ ДИФФЕРЕНЦИАЛЬНЫМ МАГНИТОМЕТРОМ | 2006 |
|
RU2313801C1 |
Изобретение относится к области измерения магнитного момента (ММ), а именно к измерению магнитных моментов объектов путем измерения составляющих индукции магнитных полей в условиях наличия естественных и промышленных помех. Отличительная особенность способа заключается в том, что производятся измерения разности сигналов между двумя парами магнитоизмерительных датчиков, установленными в противоположных, симметрично расположенных точках относительно центра координат объекта. По результатам измерения разности одноименных составляющих магнитных полей и известных координат положения магнитоизмерительных датчиков относительно центра объекта определяют составляющие мультипольных магнитных моментов. С помощью системы контуров, расположенных вокруг объекта, имитируют условия нахождения объекта в любой широтной зоне и определяют искомые магнитные моменты индуцированной и остаточной намагниченности в этой зоне. Технический результат – повышение помехозащищенности и точности измерения составляющих мультипольных магнитных моментов объектов. 3 з.п. ф-лы, 2 ил.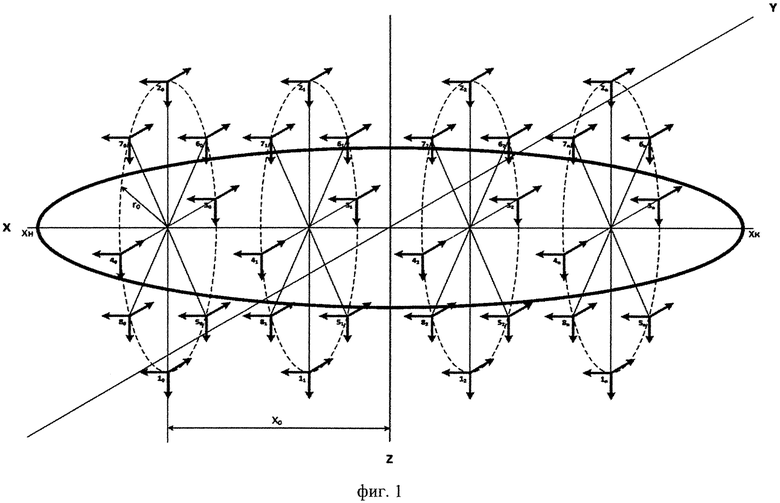
1. Способ измерения магнитных моментов объекта, включающий одновременное измерение уровней составляющих магнитной индукции в ортогональных направлениях во внешних точках относительно объекта с известными координатами относительно центра объекта, отличающийся тем, что перед проведением измерений уровней составляющих индукции магнитных полей объекта компенсируют в объеме магнитоизмерительных датчиков составляющие индукции постоянного магнитного поля Земли, затем вводят объект в измерительную систему, соосно ориентируют оси объекта с осями измерительной системы и выполняют измерения разности одноименных составляющих индукции магнитного поля объекта между противоположно установленными датчиками измерительной системы, расположенных по окружности относительно продольной оси объекта, и вычисляют искомые значения составляющих магнитных моментов.
2. Способ измерения магнитных моментов объекта по п. 1, отличающийся тем, что объект размещают внутри многосекционной магнитоизмерительной системы с соосным расположением осей объекта с осями измерительной системы, измеряют одновременно разность составляющих индукции магнитного поля в каждой измерительной секции, плоскость которой совпадает с центром каждого сечения объекта, расположенных вдоль вытянутой оси объекта с известным расстоянием между ними, вычисляют последовательно значения магнитных моментов сечения, участков и объекта в целом.
3. Способ измерения магнитных моментов объекта по любому из пп. 1, 2, отличающийся тем, что вокруг объекта устанавливают систему ортогональных контуров, соединенных с источником тока, выполняют измерения разности одноименных составляющих индукции магнитного поля объекта при положении объекта в магнитном поле, создаваемых контурами, с противоположным направлением относительно осей объекта.
4. Способ измерения магнитных моментов объекта по п. 1, отличающийся тем, что выполняют измерения разности одноименных составляющих индукции при положении осей объекта последовательно в противоположных направлениях относительно осей измерительной системы.
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОГО МОМЕНТА ОБЪЕКТА | 2008 |
|
RU2375721C1 |
| Способ определения местоположения на плоскости объекта,обладающего магнитным моментом | 1986 |
|
SU1372261A1 |
| Способ измерения магнитного момента и устройство для его осуществления | 1986 |
|
SU1354143A1 |
| US 6037769 A1, 14.03.2000. | |||

