Предлагаемое изобретение относится к радиолокации, а именно к системам определения местоположения воздушных судов многопозиционной неизлучающей системой наблюдения «навигационные спутники - воздушные цели - приемник», в которой для подсвета воздушных целей используются сигналы навигационных спутников глобальных навигационных спутниковых систем (ГНСС).
Многопозиционная неизлучающая система наблюдения «навигационные спутники - воздушная цель - приемник» решает специфическую задачу, связанную с объединением в приемнике информации, поступающей от нескольких спутников и нескольких целей. Эта задача состоит в отождествлении рассчитываемых координат с соответствующими целями.
Одной из задач, решаемых при радиолокационном наблюдении, является задача отождествления пеленгов источников излучений, измеренных в различных приемных устройствах [1].
Известен способ многопозиционной радиолокации [2]. заключающийся в излучении радиолокационных сигналов, синхронизированном приеме отраженных сигналов аппаратурой разнесенных позиций, объединении и совместной обработке сигналов и информации для обнаружения целей, измерения их координат, определения параметров траекторий и последующего отождествления, в котором аппаратурой разнесенных позиций осуществляют синхронизированные излучение и прием сигналов с использованием линий электропередачи.
Известна многопозиционная система определения местоположения воздушных судов [3], содержащая наземный радиозапросчик и самолетный ответчик, соединенные линией запроса, не менее трех приемников ответных сигналов, соединенных с самолетным ответчиком по линиям ответа. Отождествление воздушных судов осуществляется по кодированному ответному сигналу, содержащему информацию о бортовом номере, высоте, запасе топлива.
Однако эти способы не предназначены для отождествления воздушных целей в неизлучающей многопозиционной системе наблюдения «навигационные спутники - воздушные цели - приемник».
Наиболее близким к предлагаемому изобретению является способ определения координат воздушной цели в многопозиционной системе наблюдения «навигационные спутники - воздушная цель - приемник», описанный в статье [4], в основу которого положен разностно-дальномерный навигационный метод определения координат.
Недостатком данного способа является то, что он обеспечивает определение координат одной и единственной воздушной цели, в многопозиционной системе наблюдения «навигационный спутник -воздушная цель - приемник».
Целью изобретения является разработка способа отождествления позиционных измерений и определения местоположения воздушных целей в пространственно-распределенной радионавигационной системе в условиях многоцелевой обстановки, способного осуществлять отождествление рассчитываемых координат по измерениям сумм расстояний от воздушных целей до навигационных спутников и приемника, координаты которых известны. При этом в приемнике неизвестна информация о принадлежности измеренных расстояний той или иной воздушной цели.
Технический результат достигается тем, что
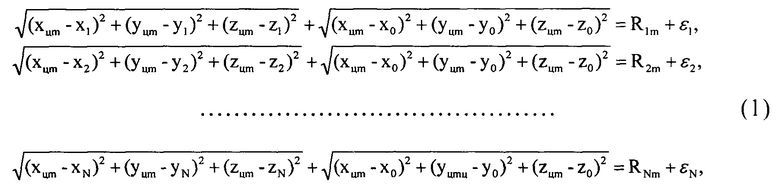
- производится расчет NM возможных вариантов координат воздушных целей xmц, ymц, zmц на основе измерений по рассеянным сигналам расстояний Rnm вдоль пути распространения «n-й навигационный спутник - m-я воздушная цель - приемник» с помощью системы уравнений
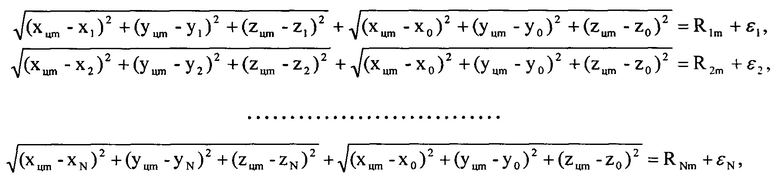
где xn, yn, zn, n=1, 2, …, N - координаты спутников, x0, y0, z0 - координаты приемника, εn, n=1, 2, …, N - погрешность оценки расстояний, m=1, 2, …, М - номер воздушной цели,
- формируется показатель  , где
, где

- координатами М целей будут координаты, рассчитанные с помощью системы уравнений, имеющие номера, равные номерам М минимальных значений показателя  .
.
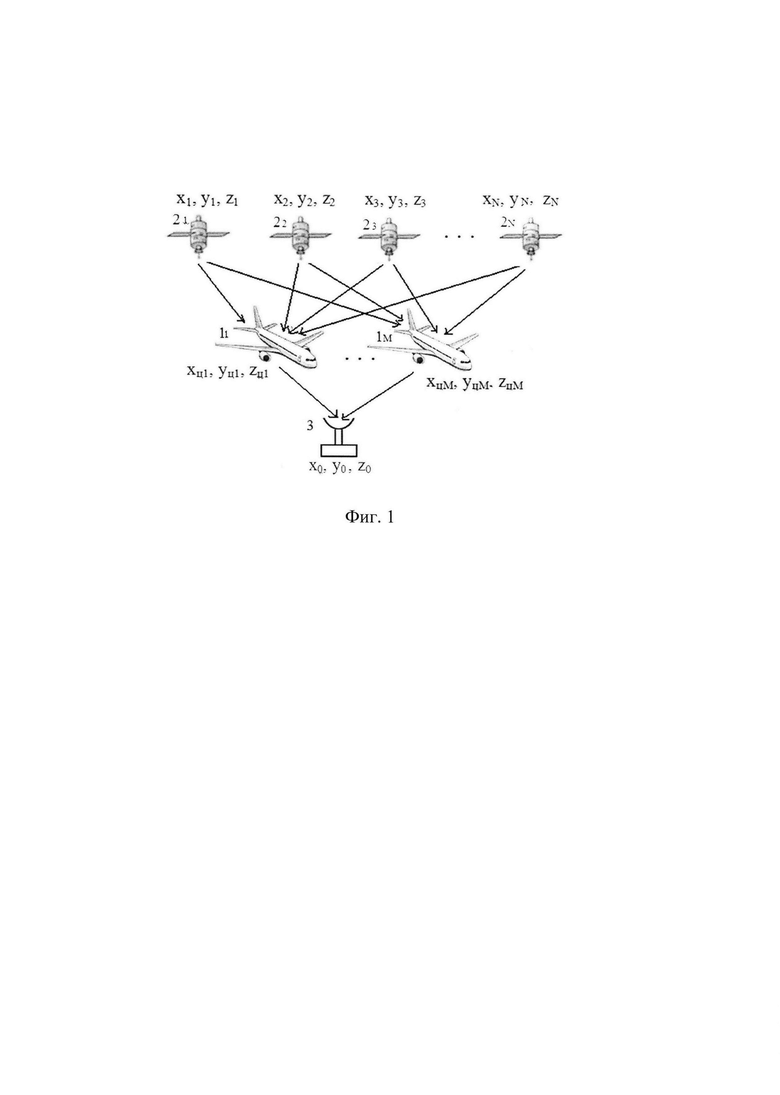
На Фиг. 1 приведена функциональная схема многопозиционной системы наблюдения «навигационные спутники - воздушные цели -приемник», рассматриваемая в данном способе.
В этой системе наблюдения для подсвета воздушных целей 1m (m=1, 2, …, М) с искомыми координатами xцm, yцm, zцm используются сигналы навигационных спутников ГНСС 2n с известными координатами (xn, yn, zn), (n=1, 2, …, N).
Отраженные от воздушных целей 11, 12, 1M сигналы, наряду с навигационными сигналами прямого рапространения, поступают в приемник 3, находящийся в зоне действия системы наблюдения, с известными координатами (x0, y0, z0).
Приемник 3, синхронизированный со спутниками, сигналы, рассеянные воздушной целью 1m, выделяет на фоне сигналов прямого распространения одним из оценочно-корреляционно-компенсационных методов [5], измеряет расстояния Rnm вдоль пути распространения «n-й навигационный спутник - m-ая воздушная цель - приемник» и рассчитывает координаты целей.
Искомые координаты m-ой воздушной цели xцm, yцm, zцm (m=1, 2, …, М) связаны с расстояниями Rnm вдоль пути распространения «n-й навигационный спутник - m-ая воздушная цель - приемник» с помощью системы уравнений
где εn, n=1, 2, …, N - погрешность оценки расстояний.
Решение этой системы уравнений можно осуществить итерационным методом [6].
Особенность сформулированной цели изобретения состоит в том, что в приемнике неизвестно какой из m-й цели (m=1, 2, …, М) принадлежит расстояние «n-й навигационный спутник - m-ая воздушная цель - приемник». Из-за этого возникает большое число возможных вариантов координат целей, равное NM вариантов расстояний. Вследствие этого число возможных вариантов координат, а соответственно и систем уравнений для их оценки в приемнике равно NM.
После расчета NM возможных вариантов координат воздушных целей 1М необходимо решить задачу отождествления, состоящую в принятии решения о принадлежности истинных координат той или иной воздушной цели. Для решения задачи отождествления сформулируем критерий принадлежности рассчитанных координат соответствующим воздушным целям 1M.
Для этого перепишем уравнения системы (1) в виде разностей между левой и правой частями
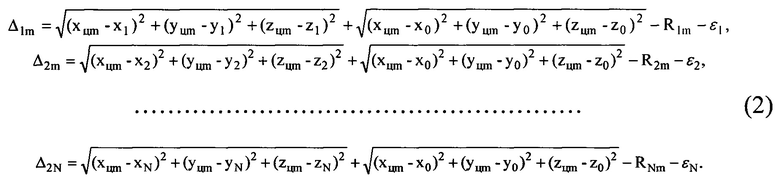
Число возможных вариантов систем уравнений (2) равно NM.
Сформируем показатель, как сумму модулей разностей

Этот показатель будет иметь минимальное значение, когда координаты воздушной цели 1m, будут соответствовать измеренным до нее расстояниям. Поэтому в качестве критерия оптимальной оценки координат предлагается использовать минимальное значение показателя (3). То есть критерием отождествления координат в приемнике 3, соответствующих М воздушным целям 1, будет М минимальных значений показателя  из L=NM возможных.
из L=NM возможных.
Литература.
1. Теоретические основы радиолокации под ред. проф. Ширмана Я.Д. - М.: Сов. радио, 1970, С. 494-495.
2. Патент 2332684 РФ, МПК G01S 10/00. Способ многопозиционной радиолокации и устройство для его осуществления / А.Л. Куликов (РФ); Куликов Александр Леонидович (РФ). - №2007102750; Заявлено 24.01.2007; Опубл. 27.08.2008. Бюл. 24. 5 с.: 1 ил.
3. Патент 2584689 РФ, МПК G01S 13/74. Многопозиционная система определения воздушных судов / Г.Н. Майков (РФ), А.В. Демидюк (РФ), Е.В. Демидюк (РФ); Майков Геннадий Николаевич (РФ), Демидюк Андрей Викторович (РФ), Демидюк Евгений Викторович (РФ). - №2014145250; Заявлено 11.11.2014; Опубл. 20.05.2016. Бюл. 14. 11 с.: 3 ил.
4. Кирюшкин В.В., Черепанов Д.А., Дьяконов Е.А. Определение координат воздушной цели в многопозиционной системе наблюдения «навигационные спутники - воздушная цель - навигационный приемник». АО «Концерн «Созвездие». Теория и техника радиосвязи. №2. 2016. С. 29-35.
5. Патент 2591052 РФ, МПК G01S 5/06, G01S 13/95 Способ обнаружения и оценки радионавигационных параметров сигнала космической системы навигации, рассеянного воздушной целью, и устройство его реализации / В.В. Кирюшкин (РФ), Д.А. Черепанов (РФ), A.А. Дисенов (РФ) и др.; Российская Федерация, от имени которой выступает Министерство обороны Российской Федерации (RU), Федеральное государственное казенное военное образовательное учреждение высшего профессионального образования "Военный учебно-научный центр Военно-воздушных сил "Военно-воздушная академия имени профессора Н.Е. Жуковского и Ю.А. Гагарина" (г. Воронеж) Министерства обороны Российской Федерации (RU) -№2014101847; Заявлено 21.01.2014. Опубл. 10.07.2016. Бюл. 19. 9 с.: 1 ил.
6. Шебшаевич B.C., Дмитриев П.П., Иванцевич Н.В. и др. Сетевые спутниковые радионавигационные системы / Под ред. П.П. Дмитриева и B.C. Шебшаевича. М.: Радио и связь, 1982. 272 с.
Изобретение относится к радиолокации, а именно к системам определения местоположения воздушных судов многопозиционной неизлучающей системой наблюдения «навигационные спутники - воздушные цели - приемник», в которой для подсвета воздушных целей используются сигналы навигационных спутников глобальных навигационных спутниковых систем (ГНСС). Достигаемый технический результат - осуществление отождествления рассчитываемых координат по измерениям сумм расстояний от воздушных целей до навигационных спутников и приемника, координаты которых известны. При этом в приемнике неизвестна информация о принадлежности измеренных расстояний той или иной воздушной цели. Способ отождествления позиционных измерений и определения местоположения воздушных целей в пространственно-распределенной радионавигационной системе в условиях многоцелевой обстановки осуществляет определение координат М воздушных целей на основе измерений по рассеянным сигналам расстояний вдоль пути распространения «n-й навигационный спутник - m-я воздушная цель - приемник». 1 ил.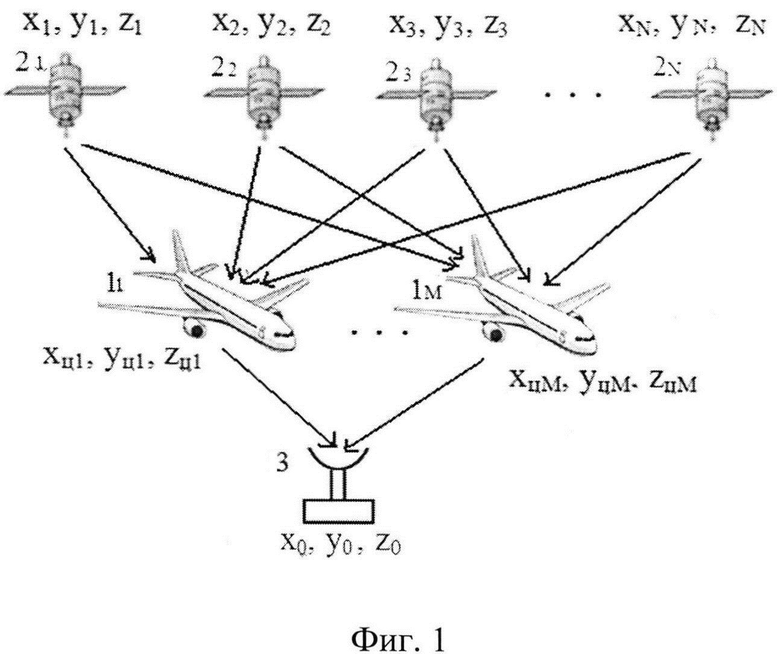
Способ отождествления позиционных измерений и определения местоположения воздушных целей в пространственно-распределенной радионавигационной системе в условиях многоцелевой обстановки, осуществляющий определение координат М воздушных целей на основе измерений по рассеянным сигналам расстояний Rnm вдоль пути распространения «n-й навигационный спутник - m-я воздушная цель - приемник» следующим образом:
- рассчитываются NM вариантов координат воздушных целей хmц, уmц, zmц с помощью системы уравнений
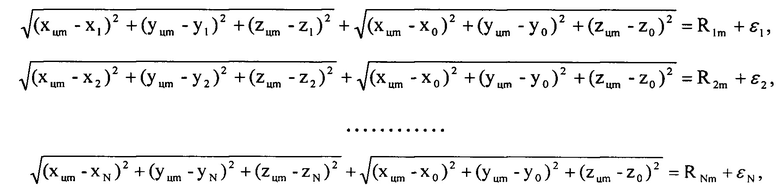
где xn, yn, zn, n=1, 2, …, N, - координаты спутников, х0, у0, z0 - координаты приемника, εn, n=1, 2, ..., N, - погрешность оценки расстояний,
- формируется показатель  , где
, где

- координатами М воздушных целей выбираются координаты, имеющие номера, равные номерам М минимальных значений показателя  .
.
| КИРЮШКИН В.В | |||
| и др | |||
| Определение координат воздушной цели в многопозиционной системе наблюдения "навигационные спутники-воздушная цель-навигационный приемник" | |||
| АО "Концерн "Созвездие" | |||
| Теория и техника радиосвязи | |||
| Токарный резец | 1924 |
|
SU2016A1 |
| СПОСОБ СТРОБОВОГО ОТОЖДЕСТВЛЕНИЯ СИГНАЛОВ С ИСТОЧНИКАМИ РАДИОИЗЛУЧЕНИЯ В МНОГОЦЕЛЕВОЙ ОБСТАНОВКЕ | 2014 |
|
RU2557784C1 |
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ВОЗДУШНЫХ СУДОВ | 2014 |
|
RU2584689C1 |
| СПОСОБ ОБНАРУЖЕНИЯ, ОПРЕДЕЛЕНИЯ КООРДИНАТ И СОПРОВОЖДЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2564385C1 |
| JP 2010091407 A, 22.04.2010 | |||
| JP 5852059 B2, 03.02.2016 | |||
| WO 2003005058 A2, 16.01.2003. | |||

