Предлагаемое изобретение относится к радиолокации и может быть использовано для межпозиционного отождествления результатов измерений и определения координат воздушных целей в многопозиционной радиолокационной системе (МПРЛС) в условиях многоцелевой обстановки.
Известен способ межпозиционного отождествления результатов измерений в МПРЛС [1, с. 393], основанный на прямом переборе всех возможных гипотез отождествления, в результате которого необходимо сформировать N групп отметок (по числу разрешенных целей) так, чтобы каждая группа содержала m отметок (по одной от каждой позиции МПРЛС), причем каждая отметка входила бы только в одну группу. В этом случае потребуется проверить  гипотез отождествления, для каждой из которых вычислить координаты N целей с использованием известных методов (например, метода наименьших квадратов).
гипотез отождествления, для каждой из которых вычислить координаты N целей с использованием известных методов (например, метода наименьших квадратов).
Недостаток данного способа заключается в том, что при проверке  гипотез отождествления, количество гипотез, а следовательно, и потребные вычислительные мощности, быстро растут с увеличением количества наблюдаемых целей, а для сокращения количества ложных гипотез применяется предварительное стробирование по координатам и параметрам, для чего необходимы избыточные измерения дополнительных параметров, например, в дальномерных измерительных системах необходимо измерить и азимут цели.
гипотез отождествления, количество гипотез, а следовательно, и потребные вычислительные мощности, быстро растут с увеличением количества наблюдаемых целей, а для сокращения количества ложных гипотез применяется предварительное стробирование по координатам и параметрам, для чего необходимы избыточные измерения дополнительных параметров, например, в дальномерных измерительных системах необходимо измерить и азимут цели.
Целью предлагаемого способа является межпозиционное отождествление, обеспечивающее сокращение количества гипотез отождествления при большом количестве целей и не требующее при этом избыточных измерений дополнительных параметров.
Предлагаемый способ межпозиционного отождествления результатов измерений и определения координат воздушных целей в суммарно-дальномерной МПРЛС основан на использовании избыточных суммарно-дальномерных измерений, полученных в m>1 позициях МПРЛС, обеспечивающий в МПРЛС одну из позиций, условно выбранную в качестве базовой, и последовательно рассматриваемые все отметки воздушных целей, зарегистрированных в базовой позиции МПРЛС, проверку для каждой отметки воздушной цели базовой позиции по соответствующему суммарно-дальномерному измерению базовой позиции на основе построения поверхности положения (базового эллипсоида) с фокусами в точках местоположения передатчика и приемника базовой позиции, определение местоположения проверяемой воздушной цели на базовом эллипсоиде путем организации виртуального обзора пространства из центра базового эллипсоида по угловым координатам с проверкой гипотезы о нахождении воздушной цели на поверхности базового эллипсоида в точке с заданными угловыми координатами, по минимуму невязки между действительными суммарно-дальномерными измерениями воздушных целей в каждой избыточной позиции (кроме базовой) и гипотетической суммарной дальностью, рассчитанной для этой же избыточной позиции в предположении, что воздушная цель находится в проверяемой точке на поверхности базового эллипса, расчет суммы таких минимальных невязок для проверяемой гипотезы всей МПРЛС по всем избыточным позициям (кроме базовой), получение двухмерной зависимости значений суммарной невязки от угловых координат точки на поверхности базового эллипсоида в ходе виртуального обзора пространства и проверки всех гипотез о нахождении проверяемой воздушной цели, минимальную суммарную невязку, служащую для получения грубой оценки пространственных координат воздушной цели, для которой был построен базовый эллипсоид, формирование из отметки базовой позиции вектора измерений (т.е. группы отметок) для этой воздушной цели, и отметок избыточных позиций, обеспечивающих минимум суммарной невязки, повторяемость аналогичных процедур с построением базового эллипсоида для каждой отметки воздушных целей, наблюдаемых в базовой позиции МПРЛС.
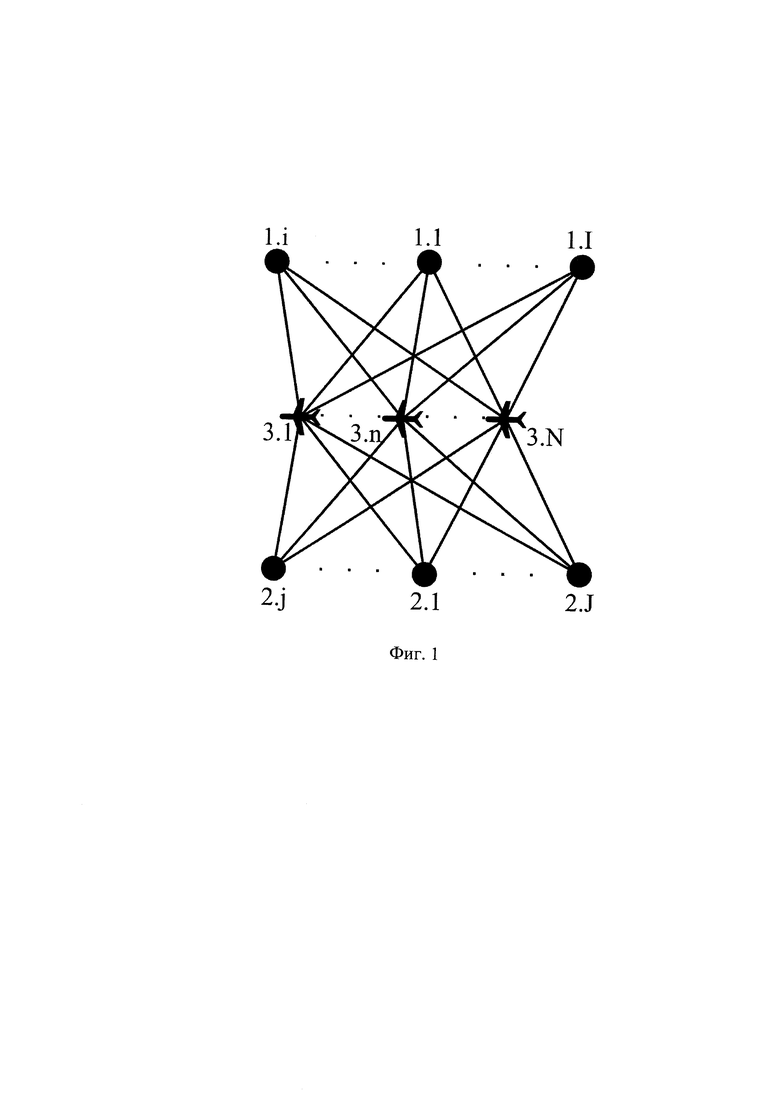
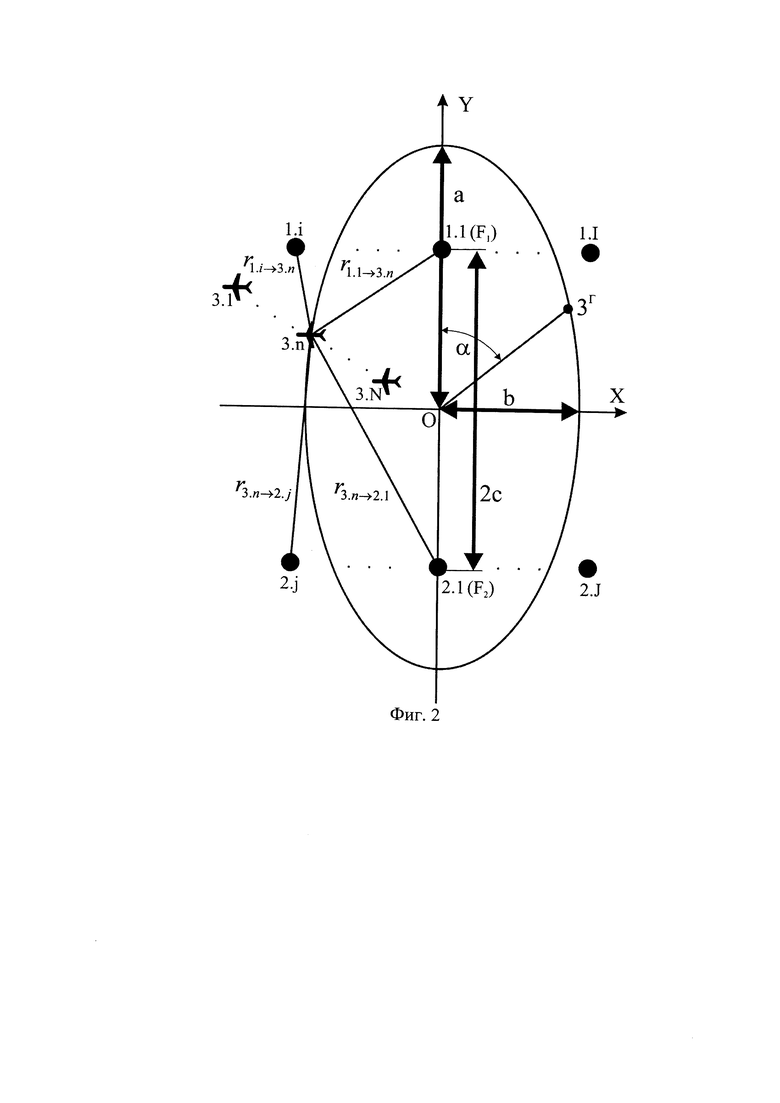
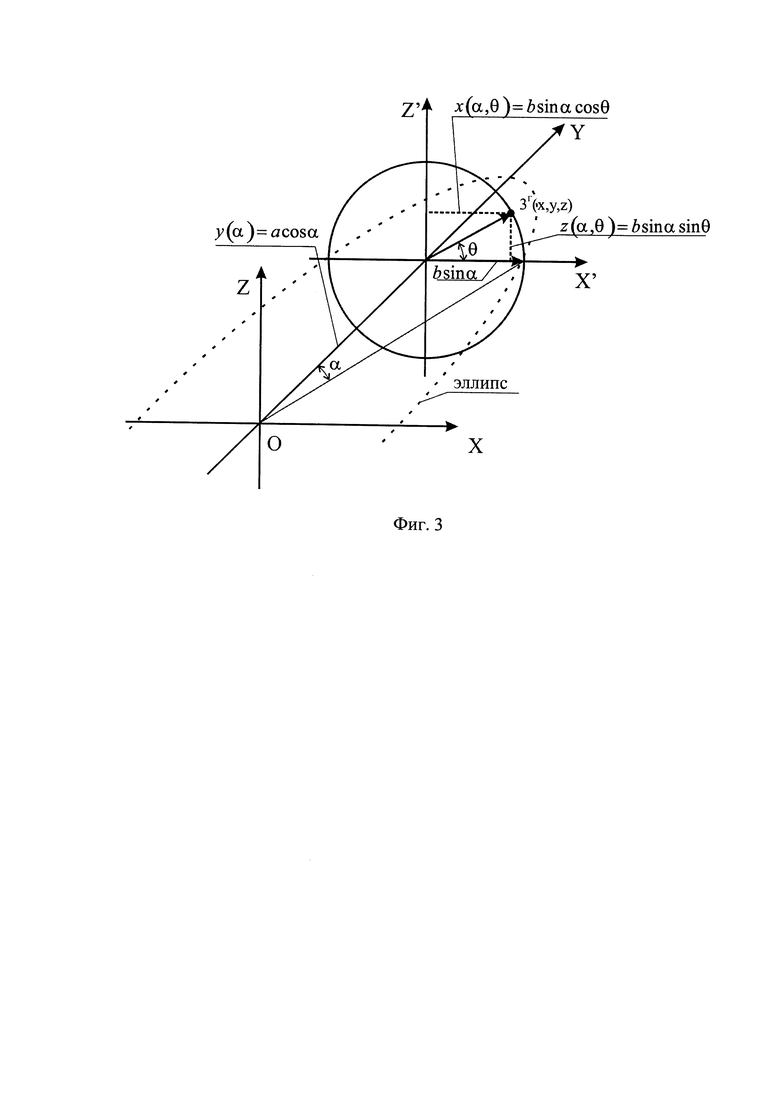
Сущность способа межпозиционного отождествления результатов измерений и определения координат воздушных целей в многопозиционной радиолокационной системе поясняется следующими рисунками. На фиг. 1 показана функциональная схема МПЛРС, на фиг. 2 показана система координат в МПЛРС, где ось X перпендикулярна оси Y в плоскости поверхности земли, на фиг. 3 показана система координат в МПЛРС, где ось Z направленна вертикально вверх.
В способе межпозиционного отождествления результатов измерений и определения координат воздушных целей в многопозиционной радиолокационной системе задействованы I передатчиков 1.i с координатами х1.i, у1.i, z1.i, i=1, 2, …, I, и J приемников 2.j с координатами х2.j, y2.j, z2,j, j=1, 2, …, J (общее количество позиций m=I⋅J), в зоне действия которой одновременно находятся N воздушных целей 3.n с искомыми координатами х3.n, у3.n, z3.n, n=1, 2, …, N.
В каждой позиции «передатчик 1.i - приемник 2.j» получено N отметок наблюдаемых воздушных целей 3.n. Соответствующие суммарные измерения дальности по сигналу от i-го передатчика 1.i, рассеянному n-ой воздушной целью 3.n и принятому в j-м приемнике 2.j, имеют вид

где  - дальность пути по сигналу от передатчика 1.i до воздушной цели 3.n,
- дальность пути по сигналу от передатчика 1.i до воздушной цели 3.n,  - дальность пути по сигналу от воздушной цели 3.n до приемника 2.j, ε - случайная погрешность измерения дальности.
- дальность пути по сигналу от воздушной цели 3.n до приемника 2.j, ε - случайная погрешность измерения дальности.
В процессе межпозиционного отождествления результатов измерений в МПРЛС необходимо все суммарные измерения дальности  в каждой позиции «передатчик 1.i - приемник 2.j» поставить в соответствие нужной цели 3.n, сформировать N векторов измерений (групп отметок целей) R3.n, грубо определить координаты всех N наблюдаемых воздушных целей 3.n и подготовить исходные данные для завязки траекторий.
в каждой позиции «передатчик 1.i - приемник 2.j» поставить в соответствие нужной цели 3.n, сформировать N векторов измерений (групп отметок целей) R3.n, грубо определить координаты всех N наблюдаемых воздушных целей 3.n и подготовить исходные данные для завязки траекторий.
Для этого в МПРЛС одна из позиций, например, позиция «передатчик 1.1 - приемник 2.1» (не устраняет общности), условно выбирается в качестве базовой позиции.
Задается система координат XYZ так, что ее центр О соответствует середине базовой позиции «передатчик 1.1 - приемник 2.1», ось Y совпадает с линией базовой позиции «передатчик 1.1 - приемник 2.1», ось X перпендикулярна оси Y в плоскости поверхности Земли (Фиг. 2), а ось Z направлена вертикально вверх (Фиг. 3). Все пространственные координаты передатчиков 1.i и приемников 2.j МПРЛС, а также пространственные координаты целей 3.n рассматриваются в этой системе координат.
Далее последовательно рассматривается каждая из всех N отметок воздушных целей 3.n, зарегистрированных в базовой позиции «передатчик 1.1 - приемник 2.1» МПРЛС.
Для каждой n-ой воздушной цели 3.n, наблюдаемой в базовой позиции «передатчик 1.1 - приемник 2.1», по соответствующему суммарно-дальномерному измерению базовой позиции «передатчик 1.1 - приемник 2.1» сначала строится линия положения этой воздушной цели 3.n. Линия положения в плоскости XY будет представлять собой эллипс с центром в начале координат и фокусами, совпадающими с передатчиком 1.1 (F1) и приемником 2.1 (F2). Для однозначного определения конфигурации этого эллипса определяются его три основных параметра: а - большая полуось, b - малая полуось, с - расстояние от центра эллипса до его фокусов F1 и F2 (Фиг. 2).
Третий параметр эллипса определяется на основании известного местоположения его фокусов F1 и F2

Суммарные измерения дальности в базовой позиции «передатчик 1.1 - приемник 2.1», соответствующие проверяемой n-ой воздушной цели 3.n  будут окончательно определять конфигурацию этого эллипса, поскольку сумма расстояний от любой точки эллипса до его фокусов равна удвоенному значению большой полуоси. Тогда величина большой полуоси будет определяться
будут окончательно определять конфигурацию этого эллипса, поскольку сумма расстояний от любой точки эллипса до его фокусов равна удвоенному значению большой полуоси. Тогда величина большой полуоси будет определяться

Значение малой полуоси эллипса определяется через а и с

Таким образом, конфигурация эллипса, соответствующего суммарно-дальномерным измерениям n-ой воздушной цели 3.n в базовой позиции «передатчик 1.1 - приемник 2.1», известна полностью.
Соответствующая поверхность положения воздушной цели 3.n в пространстве (базовый эллипсоид) получается вращением эллипса, полученного для n-ой воздушной цели 3.n базовой позиции «передатчик 1.1 - приемник 2.1», вокруг большой полуоси.
Для определения местоположения проверяемой воздушной цели 3.n на базовом эллипсоиде из центра базового эллипсоида организуется виртуальный обзор пространства по угловым координатам (по азимуту α с шагом Δα и по углу вращения θ с шагом Δθ) с проверкой гипотезы о нахождении воздушной цели 3.n на поверхности базового эллипсоида в точке с заданными угловыми координатами.
Азимут α измеряется в плоскости XY в центре базового эллипсоида (в начале координат) от большой полуоси (положительное направление оси Y) по часовой стрелке (Фиг. 2).
Угол вращения θ измеряется в плоскости X'Z', параллельной плоскости XZ и отстоящей от нее на величину y(α)=acosα, от положительного направления оси X' (Фиг. 3) по часовой стрелке (для левой тройки векторов XYZ) или против часовой стрелки (для правой тройки векторов XYZ).
На каждом шаге виртуального обзора пространства задается значение азимута α и угла вращения θ и проверяется гипотеза о положении воздушной цели 3.n на базовом эллипсоиде в заданном направлении.
Для проверки гипотезы на основании заданных значений α и θ, а также значений основных параметров базового эллипсоида для n-ой воздушной цели 3.n, рассчитываются гипотетические пространственные координаты проверяемой воздушной цели 3г (х; у; z) в предположении, что она находится на поверхности базового эллипсоида в точке с заданными угловыми координатами α и θ



В рамках проверяемой гипотезы для каждой избыточной позиции МПРЛС (кроме базовой) рассчитывается гипотетическая суммарная дальность «передатчик 1.i - гипотетическая воздушная цель 3г - приемник 2.j» в предположении, что цель находится в проверяемой точке на поверхности базового эллипсоида

В каждой избыточной позиции МПРЛС (кроме базовой) отождествление отметок воздушных целей 3.n с целью, для которой построен базовый эллипсоид, осуществляется по минимуму невязки между действительными суммарно-дальномерными измерениями воздушных целей 3.n в этой позиции и гипотетической суммарной дальностью, рассчитанной для этой же избыточной позиции в предположении, что воздушная цель 3.n находится в проверяемой точке на поверхности базового эллипсоида.
Для этого в каждой избыточной позиции «передатчик 1.i - приемник 2.j» из N действительных измерений  выбирается измерение
выбирается измерение  наилучшее по критерию минимизации невязки между гипотетическим и действительным измерением
наилучшее по критерию минимизации невязки между гипотетическим и действительным измерением

Для всей МПРЛС для проверяемой гипотезы рассчитывается сумма таких минимальных невязок по всем избыточным позициям (кроме базовой)

В ходе виртуального обзора пространства и проверки всех гипотез о нахождении проверяемой воздушной цели 3.n на поверхности базового эллипсоида получают двумерную зависимость значений суммарной невязки от угловых координат точки на поверхности базового эллипсоида 
Минимум значений суммарной невязки служит критерием правильности проверяемой гипотезы о местоположении проверяемой воздушной цели 3.n на базовом эллипсоиде

Координаты проверяемой точки  соответствующей минимуму суммарной невязки, являются грубой оценкой пространственных координат n-ой воздушной цели 3.n
соответствующей минимуму суммарной невязки, являются грубой оценкой пространственных координат n-ой воздушной цели 3.n  наблюдаемой в базовой позиции «передатчик 1.1 - приемник 2.1», для которой был построен базовый эллипсоид.
наблюдаемой в базовой позиции «передатчик 1.1 - приемник 2.1», для которой был построен базовый эллипсоид.
Вектор измерений R3.n, (т.е. группа отметок) для этой цели будет формироваться из отметки базовой позиции «передатчик 1.1 - приемник 2.1», для которой был построен базовый эллипсоид (измерение  ), и отметок в избыточных позициях, которые обеспечивают минимум суммарной невязки в соответствующей точке
), и отметок в избыточных позициях, которые обеспечивают минимум суммарной невязки в соответствующей точке  на базовом эллипсоиде (измерения
на базовом эллипсоиде (измерения 
Аналогичные процедуры с построением базового эллипсоида и виртуальным обзором пространства повторяются для каждой из N отметок воздушной целей 3.n, наблюдаемых в базовой позиции «передатчик 1.1 - приемник 2.1» МПРЛС.
В рамках предложенного способа количество Р1 проверяемых гипотез определяется количеством воздушных целей 3.n и величиной шага виртуального обзора пространства по азимуту Δα и по углу вращения Δθ
Для конфигурации МПРЛС, включающей I=3 передатчиков 1.i и J=3 приемников 2.j, и величине шага сканирования Δα=Δθ=1° выигрыш в количестве проверяемых гипотез почти на порядок наблюдается уже при количестве воздушных целей 3.n N=3
Для той же конфигурации МПРЛС при одновременном наблюдении N=4 воздушных целей 3.n выигрыш в количестве проверяемых гипотез достигнет уже шести порядков 
Кроме того, при реализации способа прототипа в ходе проверки каждой гипотезы решается система нелинейных уравнений, для чего используются затратные в вычислительном плане операции обращения матриц. В предложенном способе проверка гипотезы отождествления предполагает использование менее затратных в вычислительном плане операций вычитания, сложения и умножения.
Литература.
1. Черняк B.C. Многопозиционная радиолокация. - М.: Радио и связь, 1993. - 416 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат воздушных целей в многопозиционной радиолокационной системе в условиях малого значения отношения сигнал/шум | 2019 |
|
RU2722209C1 |
| КОМПЛЕКСНЫЙ ОБНАРУЖИТЕЛЬ КРИВОЛИНЕЙНЫХ ТРАЕКТОРИЙ ВОЗДУШНЫХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ ПАРАМЕТРИЧЕСКИХ ПРЕОБРАЗОВАНИЙ | 2021 |
|
RU2776417C1 |
| Способ определения плановых координат воздушной цели с помощью многопозиционной радиолокационной системы, встроенной в пространственно-распределенную систему радиопомех | 2023 |
|
RU2810525C1 |
| СПОСОБ АКТИВНОЙ МНОГОПОЗИЦИОННОЙ РАДИОЛОКАЦИИ МНОГОЭЛЕМЕНТНОЙ ЦЕЛИ | 2021 |
|
RU2816506C2 |
| СПОСОБ НАВЕДЕНИЯ ПРОТИВОРАКЕТЫ | 2021 |
|
RU2814291C2 |
| СПОСОБ БОНДАРЕНКО А.В. ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599259C1 |
| Комплексный обнаружитель прямолинейной траектории воздушного объекта в пространстве с использованием преобразования Хафа | 2019 |
|
RU2732916C1 |
| Способ и устройство для контроля целостности измерений бортовой аппаратуры глобальной навигационной спутниковой системы (ГНСС) с применением измерений радиосистемы ближней навигации и псевдоспутников | 2021 |
|
RU2778093C1 |
| Способ одноэтапного адаптивного определения координат источников радиоизлучений | 2021 |
|
RU2768011C1 |
| СПОСОБ ИНДИКАЦИИ ПОЛОЖЕНИЯ ОБЪЕКТОВ НАБЛЮДЕНИЯ | 2006 |
|
RU2333538C2 |
Изобретение относится к радиолокации и может быть использовано для межпозиционного отождествления результатов измерений и определения координат воздушных целей в многопозиционной радиолокационной системе (МПРЛС) в условиях многоцелевой обстановки. Достигаемый технический результат - межпозиционное отождествление, обеспечивающее сокращение количества гипотез отождествления при большом количестве целей и не требующее при этом дополнительных избыточных измерений. Способ межпозиционного отождествления результатов измерений и определения координат воздушных целей в суммарно-дальномерной МПРЛС основан на использовании избыточных суммарно-дальномерных измерений, полученных в m>1 позициях МПРЛС, при этом способ обеспечивает в МПРЛС одну из позиций, условно выбранную в качестве базовой, и последовательно рассматриваемые все отметки воздушных целей, зарегистрированных в базовой позиции МПРЛС, проверку для каждой отметки воздушной цели базовой позиции по соответствующему суммарно-дальномерному измерению базовой позиции на основе построения поверхности положения (базового эллипсоида), с фокусами в точках местоположения передатчика и приемника базовой позиции, получение грубой оценки пространственных координат воздушной цели, для которой был построен базовый эллипсоид, формирование из отметки базовой позиции вектора измерений, то есть группы отметок для этой воздушной цели, и отметок избыточных позиций, обеспечивающих минимум суммарной невязки, повторяемость аналогичных процедур с построением базового эллипсоида для каждой отметки воздушных целей, наблюдаемых в базовой позиции МПРЛС. 3 ил.
Способ межпозиционного отождествления результатов измерений и определения координат воздушных целей в многопозиционной радиолокационной системе (МПРЛС) основан на использовании избыточных суммарно-дальномерных измерений, полученных в m>1 позициях МПРЛС, обеспечивающий в МПРЛС одну из позиций, условно выбранную в качестве базовой, и последовательно рассматриваемые все отметки воздушных целей, зарегистрированных в базовой позиции МПРЛС, проверку для каждой отметки воздушной цели базовой позиции по соответствующему суммарно-дальномерному измерению базовой позиции на основе построения поверхности положения, базового эллипсоида, с фокусами в точках местоположения передатчика и приемника базовой позиции, определение местоположения проверяемой воздушной цели на базовом эллипсоиде путем организации виртуального обзора пространства из центра базового эллипсоида по угловым координатам с проверкой гипотезы о нахождении воздушной цели на поверхности базового эллипсоида в точке с заданными угловыми координатами, по минимуму невязки между действительными суммарно-дальномерными измерениями воздушных целей в каждой избыточной позиции, кроме базовой, и гипотетической суммарной дальностью, рассчитанной для этой же избыточной позиции в предположении, что воздушная цель находится в проверяемой точке на поверхности базового эллипса, расчет суммы таких минимальных невязок для проверяемой гипотезы всей МПРЛС по всем избыточным позициям, кроме базовой, получение двухмерной зависимости значений суммарной невязки от угловых координат точки на поверхности базового эллипсоида в ходе виртуального обзора пространства и проверки всех гипотез о нахождении проверяемой воздушной цели, минимальную суммарную невязку, служащую для получения грубой оценки пространственных координат воздушной цели, для которой был построен базовый эллипсоид, формирование из отметки базовой позиции вектора измерений, т.е. группы отметок для этой воздушной цели, и отметок избыточных позиций, обеспечивающих минимум суммарной невязки, повторяемость аналогичных процедур с построением базового эллипсоида для каждой отметки воздушных целей, наблюдаемых в базовой позиции МПРЛС.
| ЧЕРНЯК В.С | |||
| Многопозиционная радиолокация | |||
| Москва, Радио и связь, с.393 | |||
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ЦЕЛЕЙ | 2014 |
|
RU2567243C1 |
| Паровой трубчатый подогреватель вибрационного типа | 1959 |
|
SU130410A1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2568677C1 |
| ИЗОЛЯЦИЯ В СИСТЕМЕ ПЕРЕДАЧИ ЭЛЕКТРОЭНЕРГИИ | 2010 |
|
RU2523016C2 |
| US 5483241 A, 09.01.1996 | |||
| JP 2008281517 A, 20.11.2008. | |||

