Предлагаемое изобретение относится к радиолокации, а именно к системам определения местоположения воздушных судов многопозиционной неизлучающей системой наблюдения «навигационные спутники - воздушные цели - приемник», в которой для подсвета воздушных целей используются сигналы навигационных спутников глобальных навигационных спутниковых систем (ГНСС).
Многопозиционная неизлучающая система наблюдения «навигационные спутники - воздушные цели - приемник» имеет специфическую задачу, связанную с объединением в приемнике информации, поступающей от нескольких спутников и нескольких целей. Эта задача состоит в отождествлении рассчитываемых координат с соответствующими целями.
Одной из задач, решаемых при радиолокационном наблюдении является задача определения координат целей источников излучений, измеренных в различных приемных устройствах [1].
Известен способ многопозиционной радиолокации [2], заключающийся в излучении радиолокационных сигналов, синхронизированном приеме отраженных сигналов аппаратурой разнесенных позиций, объединении и совместной обработке сигналов и информации для обнаружения воздушных целей, измерения их координат, определения параметров траекторий и последующего отождествления, в котором аппаратурой разнесенных позиций осуществляют синхронизированные излучение и прием сигналов с использованием линий электропередачи.
Известна многопозиционная система определения местоположения воздушных судов [3], содержащая наземный радиозапросчик и самолетный ответчик, соединенные линией запроса, не менее трех приемников ответных сигналов, соединенных с самолетным ответчиком по линиям ответа.
Однако эти способы не предназначены для определения координат воздушных целей в неизлучающей многопозиционной системе наблюдения «навигационные спутники - воздушные цели - приемник».
Наиболее близким к предлагаемому изобретению является способ определения координат воздушной цели в многопозиционной системе наблюдения «навигационные спутники - воздушная цель - приемник» [4], в основу которого положен разностно-дальномерный навигационный метод определения координат.
Однако в этом источнике рассматривается способ определения координат только одной цели. Наличие же нескольких целей приводит к возникновению ложных координат реально не существующих объектов наблюдения, которые необходимо исключить. Кроме того, в этом способе при расчете координат используется итерационный метод наименьших квадратов, приводящий к возникновению дополнительных погрешностей, обусловленных приближенным методом решения.
Задачей предлагаемого изобретения является определение местоположения нескольких воздушных целей многопозиционной радиолокационной системой по измерениям сумм расстояний от целей до спутников и приемника, координаты которых известны, прямым, без итерационным методом, использующим прямое решение системы нелинейных уравнений для расчета координат.
Технический результат достигается тем, что в многопозиционной системе наблюдения, состоящей из N спутников и приемника, определение координат воздушных целей осуществляется следующим образом:
- на основе измерений по рассеянным сигналам расстояний Rnm=rnm+rm (rnm - расстояние от n-го спутника n=1, 2, …, N, до m-й воздушной цели m=1, 2, …, М, rm - расстояние от m-й цели до приемника) вдоль пути распространения «n-й навигационный спутник - m-я воздушная цель - навигационный приемник» рассчитываются NM возможных вариантов координат воздушных целей xцm, yцm, zцm с помощью системы уравнений
где
хn, yn, zn, n=1, 2, …, N - координаты спутников, εn, n=1, 2, …, N - погрешность оценки расстояний,
- оценка неизвестных координат xцm, yцm и zцm находится из решения системы уравнений с применением аппарата псевдообратных матриц в следующем виде
где  - псевдообратная матрица.
- псевдообратная матрица.
- формируется сумма  где
где

- координатами М целей берутся координаты, рассчитанные с помощью системы уравнений, имеющие номера, равные номерам М минимальных значении сумм  из NM возможных.
из NM возможных.
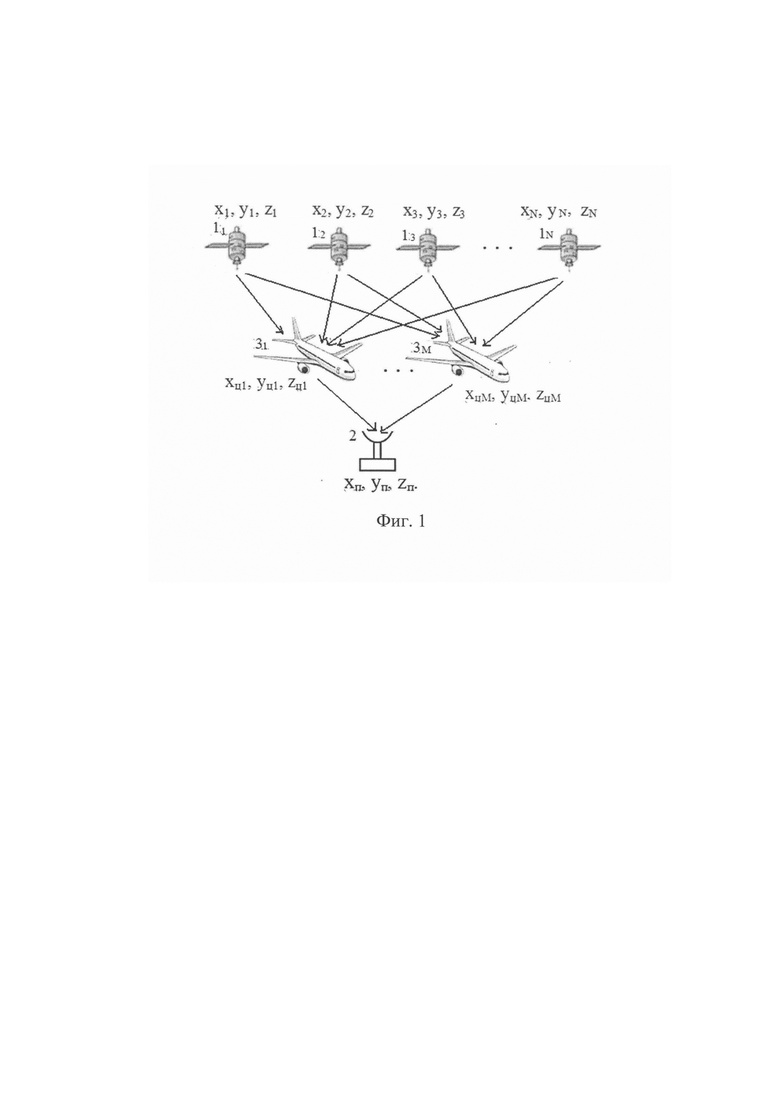
На Фиг. 1 приведена функциональная схема определения координат воздушных целей в многопозиционной системе наблюдения «навигационные спутники - воздушные цели - приемник», рассматриваемая в данном способе.
В способе определения координат воздушных целей в многопозиционной системе наблюдения «навигационные спутники - воздушные цели - приемник» задействованы N навигационных спутников 11, 12, …, 1N с координатами xn, yn, zn, где n=1, 2, …, N(N>4), М воздушных целей 31, 32, …, 3M с искомыми координатами xцm, yцm, zцm, где m=1, 2, …, М, приемник 2 с координатами x, y, z.
N навигационных спутников 11, 12, …, 1N, излучая сигналы, осуществляют подсветку М воздушных целей 31, 32, …, 3M. Приемник 2 принимает навигационные сигналы от спутников 11, 12, …, 1N и подсветку от воздушных целей 31, 32, …, 3M.
Особенность сформулированной цели изобретения состоит в том, что в приемнике 2 неизвестно какой из m-ой воздушной цели (m=1, 2, …, М) принадлежит расстояние «n-й навигационный спутник - m-я воздушная цель - приемник». Из-за этого возникает большое число L=NM возможных вариантов координат целей, из которых необходимо найти истинные координаты воздушной цели 3m.
Отраженные от воздушной целей 31, 32, … 3M сигналы поступают в приемник 2, находящийся в зоне действия системы наблюдения, с известными координатами (x, y, z).
Приемник 2 наряду с навигационными сигналами прямого распространения принимает навигационные сигналы, рассеянные воздушными целями 31, 32, … 3M с неизвестными координатами xцm, yцm, zцm, находящимися в зоне действия многопозиционной системы наблюдения. Навигационные сигналы, рассеянные воздушной целью, выделяют на фоне навигационных сигналов прямого распространения одним из оценочно-корреляционно-компенсационных методов [5]. По рассеянным сигналам осуществляется измерение расстояний Rnm=rnm+rm (rnm - расстояние от n-го спутника до m-й цели, rm - расстояние от m-й цели до приемника) вдоль пути распространения «n-й навигационный спутник - m-я воздушная цель - приемник», соответствующее выражение для которых имеет следующий вид:

где  - расстояние от n-го спутника до m-ой воздушной цели,
- расстояние от n-го спутника до m-ой воздушной цели,  - расстояние от m-ой воздушной цели до приемника 2.
- расстояние от m-ой воздушной цели до приемника 2.
После избавления от квадратного корня это уравнение примет вид

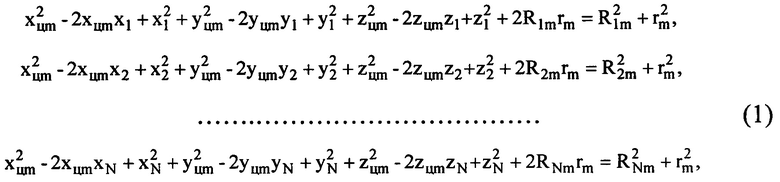
С использованием этого уравнения искомые возможные координаты m-ой воздушной цели xцm, yцm, zцm (m=1, 2, …, М) свяжем с расстояниями Rnm (n=1, 2, …, N) вдоль пути распространения «n-й навигационный спутник - m-я воздушная цель - приемник» с помощью системы уравнений




или, после раскрытия скобок
В этой системе будем искать возможные координаты xцm, yцm, zцm воздушной цели 3m и расстояние rm - от воздушной цели 3m до приемника 2. Заметим, что введение в систему переменной rm взамен  в дальнейшем позволит избавиться от квадратных корней и даст возможность реализовать прямой способ расчета координат.
в дальнейшем позволит избавиться от квадратных корней и даст возможность реализовать прямой способ расчета координат.
Система уравнений (1), является нелинейной. Она содержит неизвестные параметры в степени 2.
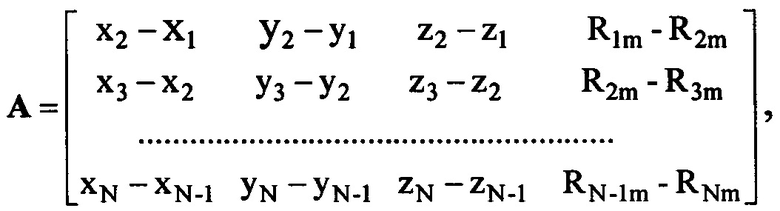
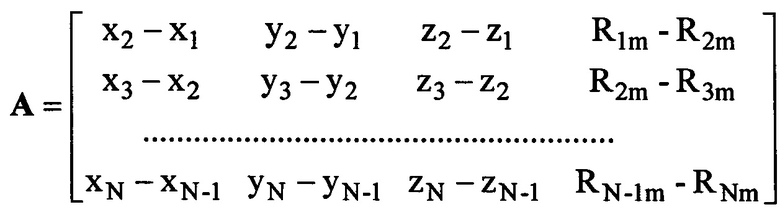
Проведем линеаризацию этой системы. Вычитая из каждого i-го уравнения уравнение с номером i+1 и приводя подобные члены, получим систему из N-1 линейных уравнений




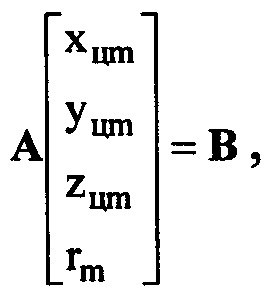
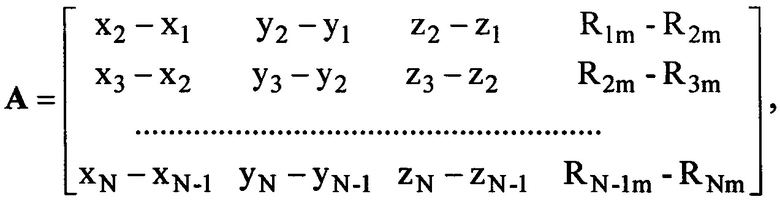
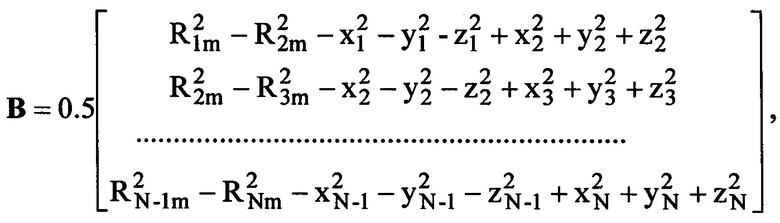
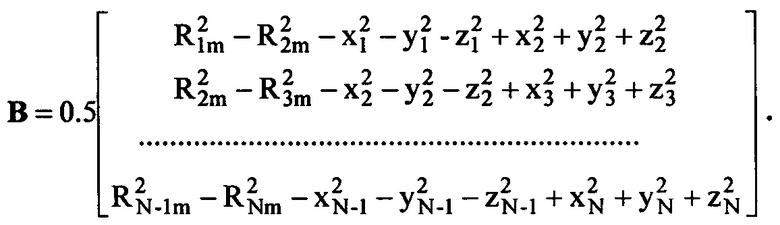
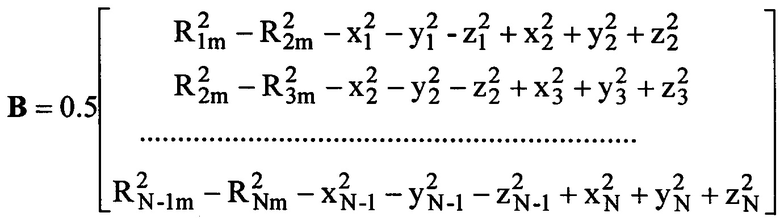
Матричная форма системы этих уравнений относительно искомых координат хцm, yцm, zцm воздушной цели 3m и расстояния r0 имеет вид

где
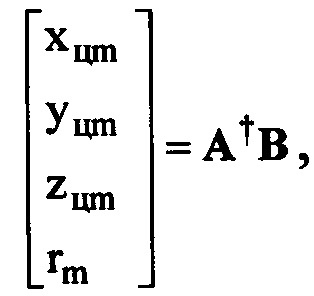
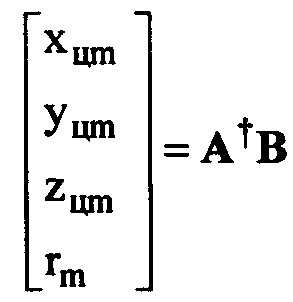
Оценку координат хцm, yцm, zцm воздушной цели 3m найдем решением системы (2) с применением аппарата псевдообратных матриц [6] в следующем виде
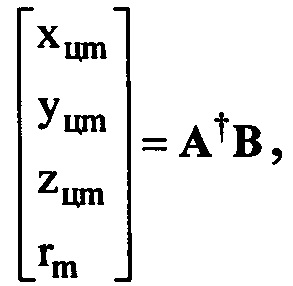
где  - псевдообратная матрица.
- псевдообратная матрица.
Таким образом определен возможный вариант пространственных координат одной из воздушных целей 3m в многопозиционной системе наблюдения «n-й навигационный спутник - m-я воздушная цель - приемник» путем прямого решения системы уравнений, связывающей искомые координаты с расстояниями вдоль пути распространения «n-й навигационный спутники - m-я воздушная цель - приемник».
После расчета NM возможных вариантов координат целей, связанных с NM возможных комбинаций расстояний, необходимо решить задачу отождествления, заключающуюся в принятии решения о принадлежности истинных координат той или цели. Для решения задачи отождествления сформулируем критерий принадлежности рассчитанных возможных координат соответствующим целям.
Координаты целей xцm, yцm, zцm должны быть связаны с измеренными расстояниями Rnm вдоль трассы распространения «n-й спутник - m-я цель - приемник» с помощью уравнения. Составим N равенств, соответствующих n-м спутникам для каждой m-й цели, сигналы которых регистрируются в приемнике
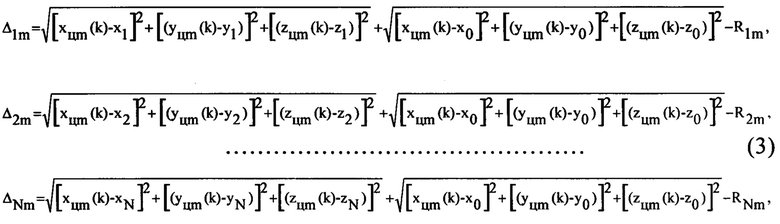
Сформируем сумму модулей 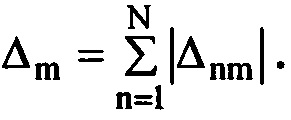 Эта сумма будет иметь минимальное значение, когда координаты цели, будут соответствовать измеренным до нее расстояниям от N передатчиков. Поэтому в качестве критерия оптимальной оценки координат предлагается использовать эту сумму. То есть критерием отождествления рассчитанных координат, соответствующих М воздушным целям, будет М минимальных значений сумм
Эта сумма будет иметь минимальное значение, когда координаты цели, будут соответствовать измеренным до нее расстояниям от N передатчиков. Поэтому в качестве критерия оптимальной оценки координат предлагается использовать эту сумму. То есть критерием отождествления рассчитанных координат, соответствующих М воздушным целям, будет М минимальных значений сумм  из NM возможных.
из NM возможных.
Литература.
1. Теоретические основы радиолокации под ред. проф. Ширмана Я.Д. - М.: Сов. радио, 1970, стр. 494-495.
2. Патент 2332684. Куликов А.Л. Способ многопозиционной радиолокации и устройство для его осуществления. Заявл. 24.01.2007. Опубл. 27.08.2008. Бюл. №24.
3. Патент 2584689. Майков Г.Н. и др. Многопозиционная система определения местоположения воздушных судов. Заявл. 11.11.2014. Опубл. 20.05.2016. Бюл. №14.
4. Кирюшкин В.В., Черепанов Д.А., Дьяконов Е.А. Определение координат воздушной цели в многопозиционной системе наблюдения «навигационные спутники - воздушная цель - навигационный приемник». АО «Концерн «Созвездие». Теория и техника радиосвязи. №2. 2016. С. 29-35.
5. Патент 2591052 РФ, МПК G01S 5/06, G01S 13/95 Способ обнаружения и оценки радионавигационных параметров сигнала космической системы навигации, рассеянного воздушной целью, и устройство его реализации / В.В. Кирюшкин (РФ), Д.А. Черепанов (РФ), А.А. Дисенов (РФ) и др.; Российская Федерация, от имени которой выступает Министерство обороны Российской Федерации (RU), Федеральное государственное казенное военное образовательное учреждение высшего профессионального образования "Военный учебно-научный центр Военно-воздушных сил "Военно-воздушная академия имени профессора Н.Е. Жуковского и Ю.А. Гагарина" (г. Воронеж) Министерства обороны Российской Федерации (RU) - №2014101847; Заявлено 21.01.2014. Опубл. 10.07.2016. Бюл. 19. 9 с.: 1 ил.
6. Маркин В.Г. Расчет координат объектов в разностно-дальномерной системе и анализ погрешностей расчета // Радиотехника. 2013. №12. С. 81-85
Изобретение относится к радиолокации, а именно к системам определения местоположения воздушных судов многопозиционной неизлучающей системой наблюдения «навигационные спутники - воздушные цели - приемник», в которой для подсвета воздушных целей используются сигналы навигационных спутников глобальных навигационных спутниковых систем (ГНСС). Достигаемый технический результат - определение местоположения нескольких воздушных целей многопозиционной радиолокационной системой по измерениям сумм расстояний от целей до спутников и приемника, координаты которых известны, прямым, безытерационным методом, использующим прямое решение системы нелинейных уравнений для расчета координат. Технический результат достигается тем, что в многопозиционной системе наблюдения, состоящей из N спутников и приемника, определение координат воздушных целей осуществляется на основе измерений по рассеянным сигналам расстояний Rnm=rnm+rm (rnm - расстояние от n-го спутника, n=1, 2, …, N, до m-й воздушной цели, m=1, 2, …, М, rm - расстояние от m-й цели до приемника), вдоль пути распространения «n-й навигационный спутник - m-я воздушная цель - навигационный приемник» рассчитываются NM возможных вариантов координат воздушных целей xцm, yцm, zцm с помощью соответствующей системы уравнений, оценка неизвестных координат xцm, yцm и zцm находится из решения системы уравнений с применением аппарата псевдообратных матриц. После расчета NM возможных вариантов координат целей, связанных с NM возможными комбинациями расстояний, по определенному критерию принимают решение о принадлежности истинных координат той или иной цели. 1 ил.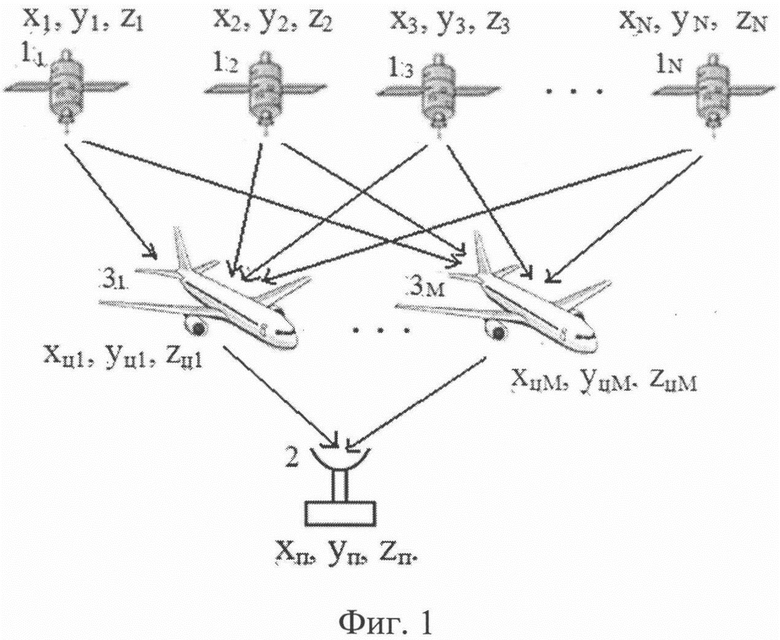
Способ определения координат воздушных целей в многопозиционной системе наблюдения «навигационные спутники - воздушные цели - приемник», состоящей из N спутников и приемника, осуществляющий
- расчет NM возможных вариантов координат воздушных целей на основе измерений по рассеянным сигналам расстояний Rnm=rnm+rm (rnm - расстояние от n-го спутника, n=1, 2, …, N, до m-й воздушной цели, m=1, 2, …, М, rm - расстояние от m-й цели до приемника) вдоль пути распространения «n-й навигационный спутник - m-я воздушная цель - приемник» xцm, yцm, zцm из системы уравнений
 ,
,
где
 ,
,
 ,
,
хn, yn, zn, n=1, 2, …, N - координаты спутников, εn, n=1, 2, …, N - погрешность оценки расстояний,
- оценку неизвестных координат xцm, yцm, zцm из решения системы уравнений с применением аппарата псевдообратных матриц в виде
 ,
,
где  - псевдообратная матрица,
- псевдообратная матрица,
- формирование суммы 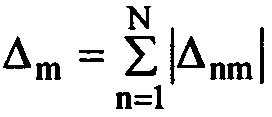 , где
, где
 ,
,
- выбор координат М целей, рассчитанных с помощью системы уравнений, имеющих номера L, равные номерам М минимальных значений сумм  из NM возможных.
из NM возможных.
| КИРЮШКИН В.В | |||
| и др | |||
| Определение координат воздушной цели в многопозиционной системе наблюдения "навигационные спутники-воздушная цель-навигационный приемник" | |||
| АО "Концерн "Созвездие" | |||
| Теория и техника радиосвязи | |||
| Токарный резец | 1924 |
|
SU2016A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА ПО СИГНАЛАМ НАВИГАЦИОННЫХ СПУТНИКОВ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА ПО СИГНАЛАМ НАВИГАЦИОННЫХ СПУТНИКОВ | 2016 |
|
RU2654321C1 |
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ВОЗДУШНЫХ СУДОВ | 2014 |
|
RU2584689C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА ПРИ ИСПОЛЬЗОВАНИИ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2492499C1 |
| US 20040145519 A, 29.07.2004 | |||
| US 7642959 B2, 05.01.2010 | |||
| US 6094164 A, 25.07.2000. | |||

