Изобретение относится к области вибрационной техники и может быть использовано для контроля динамического состояния вибрационных технологических машин.
Вибрационные технологические машины широко используются во многих производственных процессах горнодобывающей промышленности, сельском хозяйстве, строительной индустрии, машиностроении, что нашло отражение в работах отечественных ученых и специалистов [1-5]. Вибрационные машины работают в условиях интенсивного динамического нагружения, что сопровождается проявлениями различных динамических эффектов. Рабочие органы вибростендов обычно представляют собой протяженные твердые тела, совершающие пространственные или плоские колебательные движения, формируемые работой различных вибровозбудителей. Широкое распространение получили системы инерционного возбуждения колебаний с одновременным синфазным действием нескольких силовых устройств.
Особенность работы технологических машин заключается в вариативности и изменяемости параметров динамических состояний рабочих органов, к которым закрепляются различные по массоинерционным и геометрическим параметрам обрабатываемых деталей.
Изменения положений центра масс, моментов инерции приведенных масс и жесткостей вибростенда приводит к существенным отклонениям в структуре вибрационных полей и распределению амплитуд колебаний по точкам протяженного рабочего органа.
С целью соответствующей настройки вибрационных полей технологические системы оборудуются измерительными системами, средствами вычислительной техники и сервоприводами для контроля и управления параметрами технологических процессов, что по существу превращает вибростенд в технологический автоматический комплекс. Это удорожает стоимость оборудования итехнологического процесса, как такового, что предопределяет инициативы по поиску и разработке новых конструктивно-технических решений.
Одним из направлений разработок, связанных с повышением эффективности технологических вибрационных процессов является введение в структуру технологических машин (или вибростендов) дополнительных связей, что может быть реализовано на основе введения в структуру механической части вибростендов специальных механизмов или устройств для преобразования движения. Такие направления модернизации не требуют серьезных экономических затрат и позволяют управлять структурой вибрационных простых технических средств и технологий оценки, контроля и управления динамическими состояниями вибрационной технологической системы.
В процессе патентного поиска выявлен ряд изобретений-аналогов.
Известно изобретение [Серга Г.В., Бабичев А.П., Бабичев И.А., Вобу A.M., Вейсса Г.К. «Станок вибрационный», патент №2605735 C1, МПК В24В 31/067, приоритет 27.12.2016], представляющее собой вибрационный станок с контейнером, закрепленным на платформе с вибратором, установленной упруго на основании. В контейнере смонтирована и жестко прикреплена к его внутренним стенкам вставка в виде винтового барабана, смонтированного из секций, собранных из двух одинаковых подсекций, выполненных из четного количества одинаковых равнобедренных треугольников, поочередно соединенных по периметру подсекции с четырьмя одинаковыми равносторонними треугольниками с образованием малого и большого торцевых отверстий в виде многоугольников. Две подсекции соединены друг с другом сторонами с торцевыми большими отверстиями. Секции присоединены друг к другу по длине винтового барабана сторонами с малыми торцевыми отверстиями с образованием многозаходной винтовой поверхности с ломаными винтовыми линиями. Винтовой барабан по всей длине усечен в верхней части по линии, параллельной оси симметрии барабана, не более чем на одну четвертую его часть. В результате расширяются технологические возможности станка и повышается интенсивность обработки.
К недостаткам данного изобретения можно отнести отсутствие возможностей автоматического регулирования динамического состояния вибростенда.
Также известен способ [Никифоров А.Н., Шохин А.Е. «Способ гидродинамического возбуждения колебаний и вибрационная машина с гидродинамическим возбудителем колебаний», патент №2589460 С1, МПК В06В 1/16, приоритет 10.07.2016], согласно которому к подвижной части вибромашины присоединяется цилиндрический резервуар (ротор), который затем заполняется маловязкой жидкостью до определенного объема и приводится во вращение с такими скоростями, что реализуется волновой резонанс, сопровождающийся требуемой амплитудой колебаний. При этом параметры вибромашины должны удовлетворять определенным соотношениям линейных размеров и массы ее регулируемых компонент. Предложенная вибромашина содержит станину, подрессоренный контейнер с установленным на нем вращающимся дисбалансом, выполненным в виде полого цилиндрического резервуара, частично заполненного жидкостью, при этом масса жидкости в резервуаре зависит от параметров вибрационной машины и частоты вращения ротора.
Недостатками данного изобретения являются отсутствие возможностей автоматической корректировки амплитуд колебаний вибрационной машины, а также отсутствие учета вращательной степени свободы движения.
Известна полезная модель [Шевцов С.М., Ереско С.П. «Вибростенд», патент №86737 U1, МПК G01M 7/06, приоритет 10.09.2009], Данное техническое решение направлено на создание устройства, создающего линейные вибрации на испытуемом изделии и позволяет повысить точность воспроизведения режимов испытаний, упростить конструкцию вибростенда. Это достигается за счет того, что в качестве вибратора вибростенда использован электродвигатель (например, постоянного тока) с кривошипно-шатунным механизмом, в котором кривошип установлен с возможностью перемещения по направляющей в виде улитки Паскаля.
К недостаткам данной полезной модели можно отнести отсутствие автоматического регулирования режимов испытаний.
За прототип выбирается способ управления [Елисеев С.В., Елисеев А.В., Каимов Е.В., Нгуен Д.Х., Выонг К.Ч. «Способ управления структурой вибрационного поля вибрационной технологической машины на основе использования эффектов динамического гашения и устройство для его осуществления», патент №2624757 С1, МПК F16F 15/02, приоритет 06.07.2018], включающий введение в конструктивно-техническую схему системы устройства для преобразования движения несамотормозящегося винтового механизма с гайкой-маховиком. Генерируют дополнительные стабилизирующие движения рабочего органа для обеспечения возможности регулирования и настройки вибрационной системы. Устройство генерирует управляющее воздействие в определенной точке рабочего органа вибростенда. Точка приложения усилия на рабочий орган имеет возможность изменяться в результате перемещения конструктивного блока вдоль рабочего органа с помощью синхронно работающих двух электроприводов. Электроприводы обеспечивают перемещение верхней и нижней частей конструктивно-технического блока с помощью ходовых винтов. Информация с датчиков, контролирующих вибрационное состояние и системы, поступает в специальный программный блок. Достигается упрощение регулировки режимов работы.
К недостаткам выбранного аналога можно отнести отсутствие в конструкции рычажных механизмов, необходимых для корректировки распределения амплитуд колебаний, а также наличие только одного управляемого элемента.
Задачей предлагаемого изобретения является корректировка распределения амплитуд колебаний рабочего органа вибрационной технологической машины за счет контроля параметров устройств для преобразования движения.
Способ корректировки распределения амплитуд колебаний рабочего органа вибрационного технологического стенда, включающий создание двумя вибровозбудителями, установленными на концах рабочего органа, совершение рабочим органом вибрационного стенда плоского колебательного движения, отличающийся тем, что вводят по обе стороны рабочего органа рычажные механизмы второго рода, имеющие неподвижные точки опоры и пригрузы с изменяющимися массами на концах, а также упругие элементы, причем регулируют длины рычажных механизмов и жесткость упругих элементов, тем самым изменяют приведенную жесткость системы для достижения необходимого уровня амплитуд рабочего органа.
Для реализации способа по п. 1, отличающееся тем, что рабочий орган снабжен двумя симметрично расположенными рычажными механизмами второго рода, имеющими на свободных концах дополнительные пригрузы, массы которых могут целенаправленно изменяться, а также устройства для изменения длин плеч рычагов, позволяющих настраивать передаточные отношения рычагов при имеющейся возможности изменять жесткость упругого элемента между пригрузом и опорной поверхностью, что, в целом, обеспечивает для рабочего органа вибростенда работу с безрезонансной и не зависящей от частоты внешнего возбуждения амплитудно-частотной характеристикой.
Предлагаемые способ изменения, настройки или корректировки динамического состояния вибростенда заключается в том, что в структуру механической системы вибростенда вводятся дополнительные связи в виде двух рычажных механизмов создающих динамических эффекты введения в систему приведенных масс и жесткостей, что позволяет решать вопросы поддержания формы и параметров вибрационного поля в определенных нормах.
Суть изобретения поясняется чертежами.
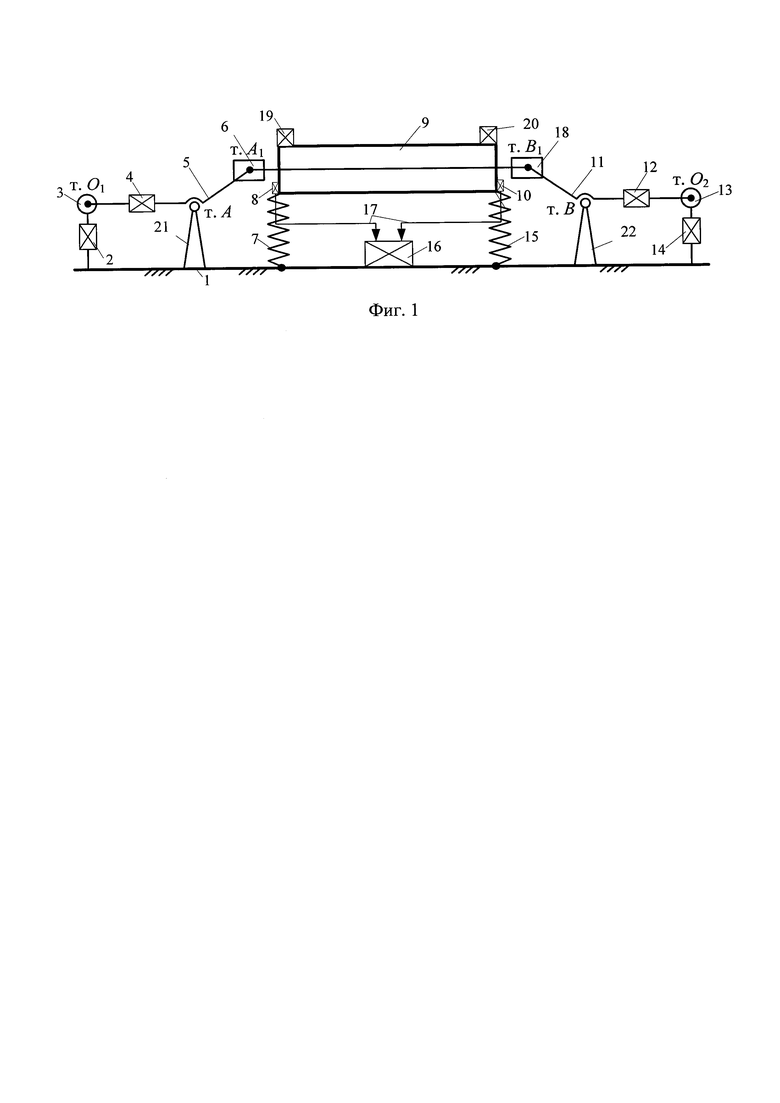
На фиг.1 приведена принципиальная схема технологической вибрационной машины с устройствами для корректировки вибрационного поля с дополнительными динамическими корректорами или рычажными устройствами, содержащая опорную поверхность 1, опорные упругие элементы 2, 14, сосредоточенные пригрузы 3, 13, специальные устройства 4, 12 для изменения длины плеч  и
и  , два устройства для преобразования движения в виде рычажных механизмов 2-го рода 5 и 11, ползуны 6 и 18, пружины 7 и 15, вибродатчики 8, 10, твердое тело 9, блок управления 16, цепь коммутации 17, вибровозбудители 19 и 20, опоры рычагов 21, 22.
, два устройства для преобразования движения в виде рычажных механизмов 2-го рода 5 и 11, ползуны 6 и 18, пружины 7 и 15, вибродатчики 8, 10, твердое тело 9, блок управления 16, цепь коммутации 17, вибровозбудители 19 и 20, опоры рычагов 21, 22.
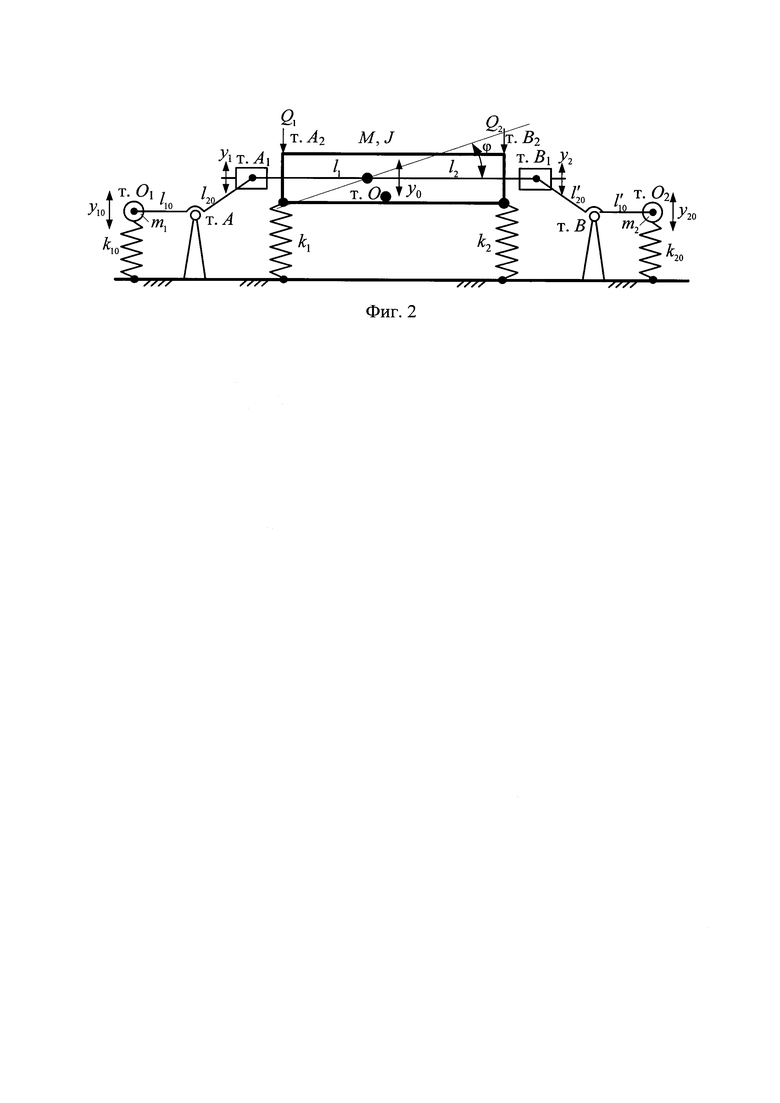
На фиг. 2 показана расчетная схема механической колебательной системы на основе фиг. 1.
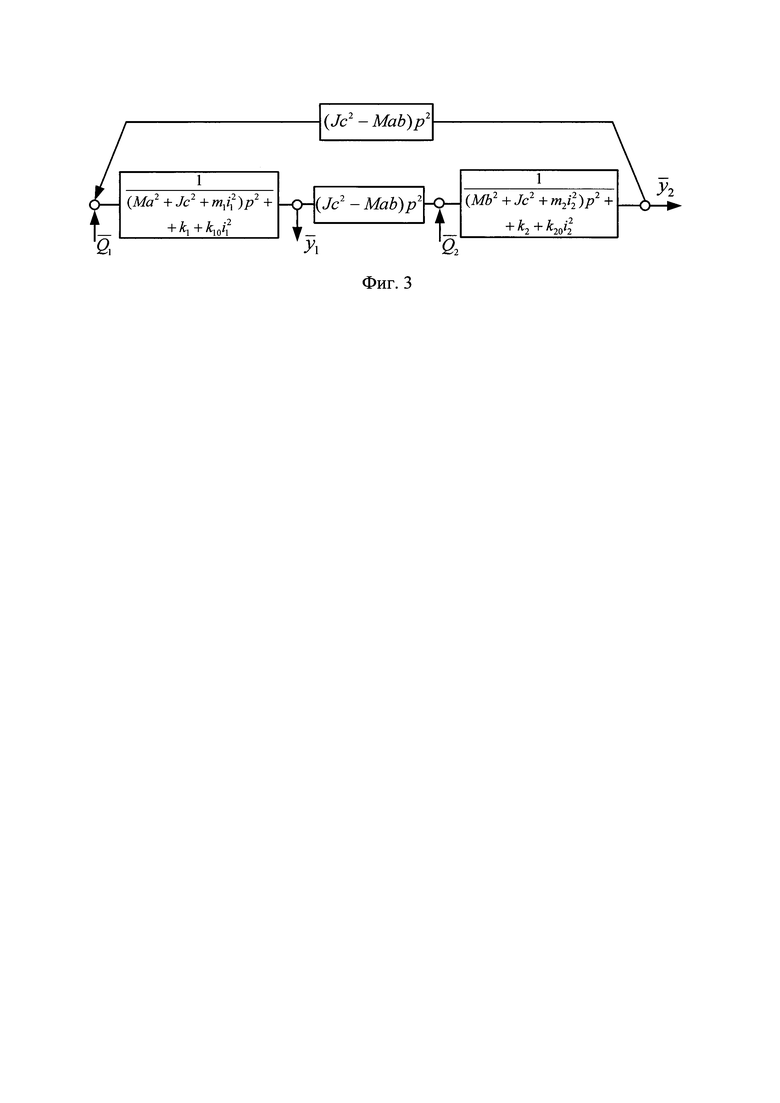
На фиг. 3 представлена структурная математическая модель (структурная схема) механической колебательной системы по фиг. 2.
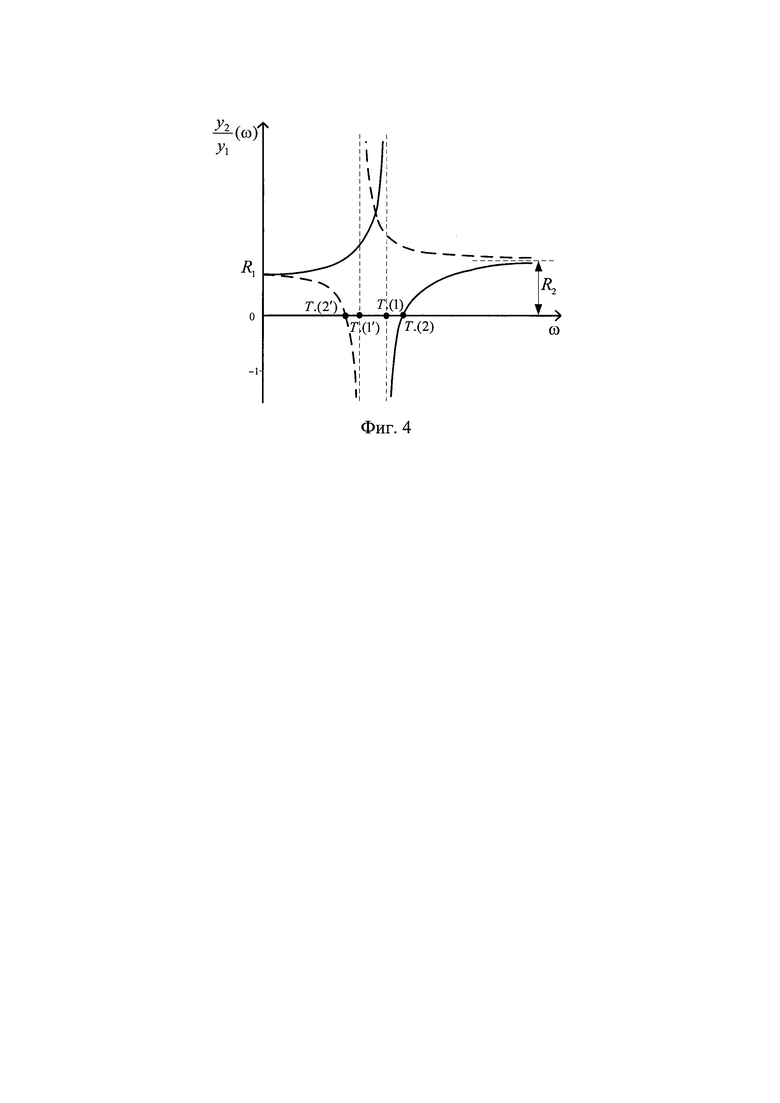
Общий вид амплитудно-частотных характеристик межпарциальных связей показан на фиг. 4.
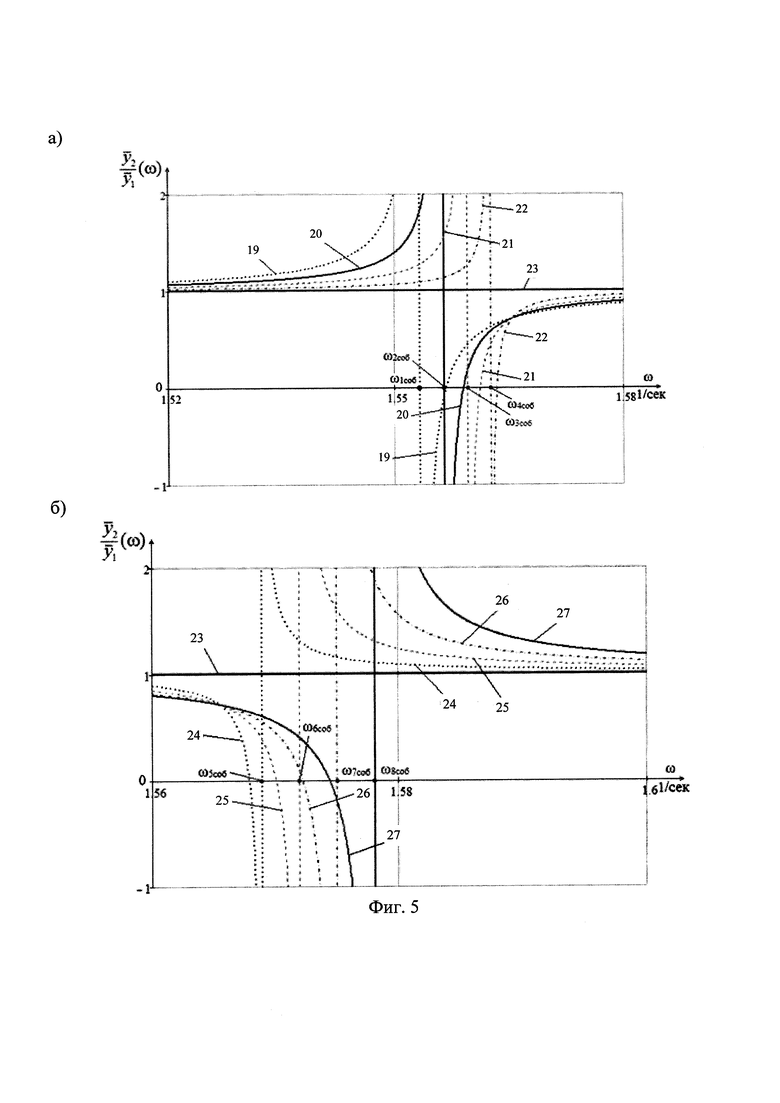
На фиг. 5, а, б приведены семейство амплитудно-частотных характеристик межпарциальных связей. На фиг. 5, а показаны графики 19 представляют собой кривые при i1=2.01, i2=1.91; графики 20 - i1=2.02, i2=1.92; графики 21 - i1=2.03, i2=1.93; графики 22 - i1=2.04, i2=1.94; графики 23 с значением i1=2.05, i2=1.95 соответствует режиму работы при . На фиг. 5, б приведены графики 24 представленной собой кривые при i1=2.06, i2=1.96; графики 25 - i1=2.07, i2=1.97; графики 26 - i1=2.08, i2=1.98; графики 27 - i1=2.09, i2=1.99; графики 23 с значением i1=2.05, i2=1.95 соответствует режиму работы при
. На фиг. 5, б приведены графики 24 представленной собой кривые при i1=2.06, i2=1.96; графики 25 - i1=2.07, i2=1.97; графики 26 - i1=2.08, i2=1.98; графики 27 - i1=2.09, i2=1.99; графики 23 с значением i1=2.05, i2=1.95 соответствует режиму работы при  .
.
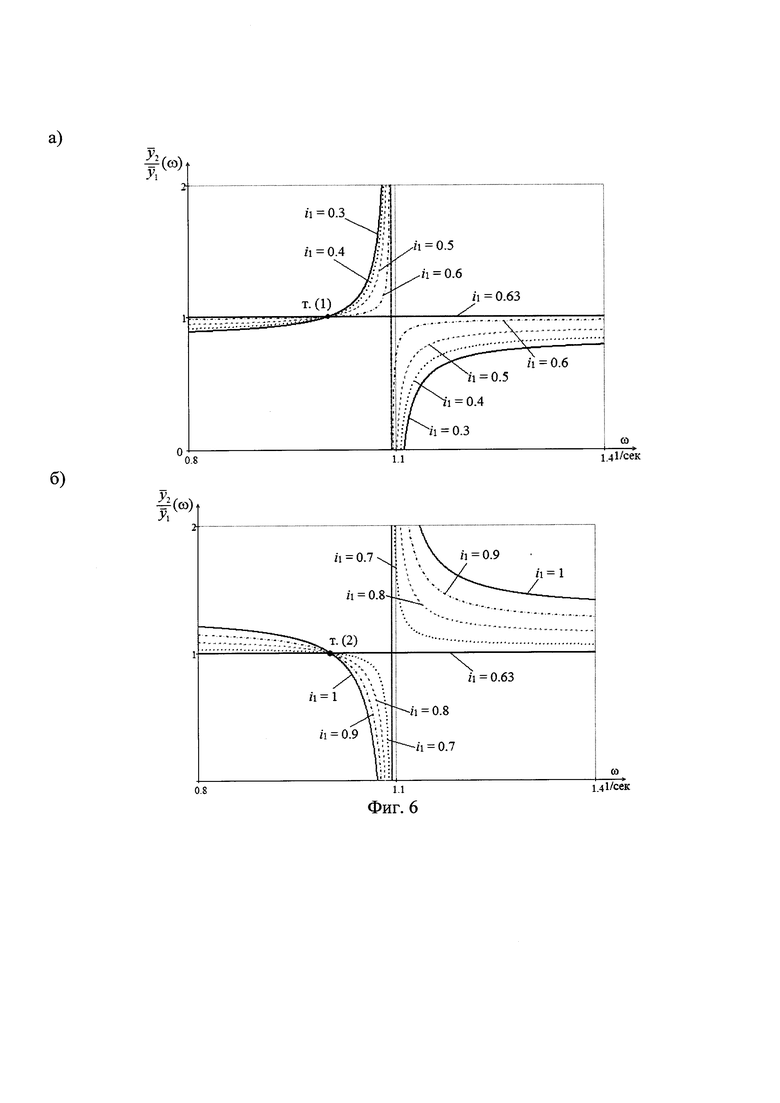
Амплитудно-частотные характеристики межпарциальных связей при m2=0 и i2=0 показаны на фиг. 6, а, б при различных значениях i1 (фиг. 6, а - докритические значения, фиг. 6, б - закритические).
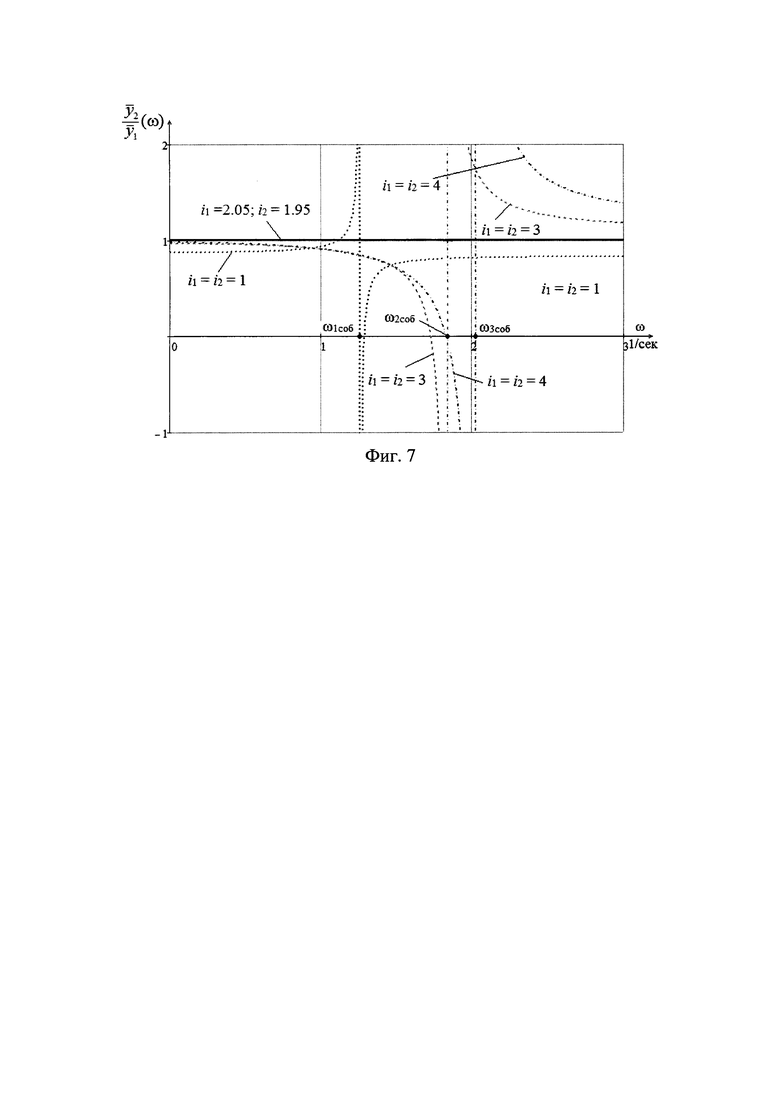
Амплитудно-частотные характеристики межпарциальных связей при различных сочетаниях i1 и i2 представлены на фиг. 6.
Изобретение работает следующим образом.
Предлагаемый способ корректировки вибрационного поля, создаваемого двумя инерционными возбудителями 19 и 20 в тт. (А2), (В2) (фиг. 1), реализуется в механической колебательной системе, состоящей из твердого тела 9 с массой М и моментом инерции J, являющимся рабочим органом вибрационной машины, использующей опорные упругие элементы 2, 14 с жесткостями k1 и k2 соответственно, а также имеющимся в составе системы двумя устройствами для преобразования движения в виде рычажных механизмов 2-го рода 5 и 11, опирающимся на опоры 21, 22 и имеющим на концах сосредоточенные пригрузы 3, 13 с массами m1 и m2 с одной стороны и ползуны 6 и 18 с другой. Рабочий орган 9 в тт. (А1), (B1) имеет подвижное соединение с рычагами 5, 11, что обеспечивает возможности изменения приведенных масс в тт. (А1), (B1). Присоединенные пригрузы 3, 13 массами m1 и m2 могут перемещаться по рычагам с помощью специальных устройств 4, 12, изменяя длины плеч  и вручную при настройке системы перед работой или автоматическом режиме, который обеспечивает, в случае необходимости, управления 16, использующего возможности контроля динамического состояния рабочего органа 9 с использованием вибродатчиков 8, 10 имеющих цепь коммутации 17 с блоком управления и обработки информации 16. С помощью пружин 2 и 14 возможна локальная настройка параметров системы k10 и k20, что обеспечивает амплитудно-частотную характеристику вибрационного поля в виде
и вручную при настройке системы перед работой или автоматическом режиме, который обеспечивает, в случае необходимости, управления 16, использующего возможности контроля динамического состояния рабочего органа 9 с использованием вибродатчиков 8, 10 имеющих цепь коммутации 17 с блоком управления и обработки информации 16. С помощью пружин 2 и 14 возможна локальная настройка параметров системы k10 и k20, что обеспечивает амплитудно-частотную характеристику вибрационного поля в виде , что распространяется на весь частотный диапазон. Изменение жесткостей элементов 2, 14 может быть реализовано установкой пневмоэлемента с регулируемым давлением сжатого воздуха. При установке системы автоматического контроля упругая система 2, 14 должна обеспечиваться компрессором, управляемым дросселями и датчиками контроля динамического состояния, что обеспечивается соответствующей работой блока управления 16. При ручной настройке вибростенда для выбора параметров системы используются аналитические соотношения.
, что распространяется на весь частотный диапазон. Изменение жесткостей элементов 2, 14 может быть реализовано установкой пневмоэлемента с регулируемым давлением сжатого воздуха. При установке системы автоматического контроля упругая система 2, 14 должна обеспечиваться компрессором, управляемым дросселями и датчиками контроля динамического состояния, что обеспечивается соответствующей работой блока управления 16. При ручной настройке вибростенда для выбора параметров системы используются аналитические соотношения.
Конструктивно-технические особенности вибрационной технологической машины при соответствующем выборе параметров механической колебательной системы в ручном режиме, то есть после соответствующего выбора параметров системы могут обеспечить безрезонансные формы амплитудно-частотных характеристик. Как дополнительный вариант распределения возможностей настройки системы обладает вариативным потенциалом настройки через изменения длин плеч рычажных механизмов через блоки 4, 12.
Более подробно суть изобретения раскрыта при помощи математического моделирования, что приведено в теоретическом обосновании.
Теоретическое обоснование
1. Расчетная схема вибростенда приведена на фиг.2. Рабочий орган вибростенда в виде твердого тела массой М и моментом инерции J опирается на упругие элементы (линейные пружины) с коэффициентами жесткости k1 и k2. В тт. (А) и (В) закреплены рычаги второго рода, на концах которых в тт. (O1) и (O2) закреплены пригрузы с массами m1 и m2 соответственно. В тт. (А1) и (В1) рычага устанавливаются на ползуны, обеспечивающие необходимые условия для совместных движений элементов системы. Пригрузы m1 и m2 опираются, в свою очередь, на поверхность через упругие элементы с коэффициентами жесткости k10 и k20. Рычажные устройства обеспечивают постоянные связи между координатами элементов системы y10 и у1, у20 и у2, что определяется соотношениями
где i1 и⋅i2 являются передаточными отношениями рычагов, представляющих собой отношении длин плеч рычагов (i является отрицательной величиной, так как точки (A1) и (O1), а также (В2) и (O2) движутся в разных направлениях.
Система обладает линейными свойствами и совершает малые колебания относительно положения статического равновесия. Силы сопротивления в данном случае полагаются малыми и не учитываются. Движение системы рассматривается в системе координат y1 и у2, связанной с неподвижным базисом. Силовые возмущения в системе формируются инерционными устройствами и описываются синфазными гармоническими колебаниями одной амплитуды (в данном случае).
Для построения математической модели системы в виде двух обыкновенных дифференциальных уравнений с постоянными коэффициентами используются уравнения Лагранжа 2-го рода.
Выражения для кинетической и потенциальной энергий могут быть записаны в виде


Между системами координату y1,у2 и у0, ϕ существуют следующие соотношения

где  и
и  - расстояния центра масс до точек приложения сил Q1 и Q2.
- расстояния центра масс до точек приложения сил Q1 и Q2.
После ряда преобразований система уравнений движения может быть записана


После преобразований Лапласа при нулевых начальных условиях, система уравнений (6), (7) может быть представлена в операторной форме: 

где р=jω - комплексная переменная  ; значок 〈-〉 над переменной означает ее изображение по Лапласу.
; значок 〈-〉 над переменной означает ее изображение по Лапласу.
Система уравнений (8), (9) в операторной форме может быть представлена в виде структурной математической модели, которая интерпретируется как структурная схема эквивалентной в динамическом отношении системы автоматического управления.
Как это следует из структурной схемы на фиг. 3 система состоит из двух парциальных блоков (или систем), имеющих инерционную межпарциальную связь, передаточная функция которой определяется выражением

При определенных значениях коэффициентов а и b межпарциальная связь может «обнуляться». В этом случае колебательные процессы в своих движениях становятся автономными. Однако для обеспечения работы технологического оборудования такие режимы не являются рациональными. Парциальные частоты системы зависят от параметров рычажных связей (рис. 1) и определяются выражениями
Внешние воздействия  и
и  , создаваемые инерционными возбудителями могут изменяться в достаточно широких пределах, в том числе, и в отношении фазовых сдвигов и соотношения амплитуд колебаний. В данном случае предполагается, что в системе могут выполняться условия
, создаваемые инерционными возбудителями могут изменяться в достаточно широких пределах, в том числе, и в отношении фазовых сдвигов и соотношения амплитуд колебаний. В данном случае предполагается, что в системе могут выполняться условия

Задача исследования заключается в разработке метода формирования структуры вибрационного поля рабочего органа как некоторой системы распределения амплитуд колебаний, обеспечивающих условия однородности форм движения (например через «обнуление» угловых движений или выполнение определенных соотношений между координатами в условиях независимости или малой зависимости от частоты внешних сил).
2. Используя структурную схему системы (фиг. 3), найдем передаточные функции






где

- частотное характеристическое уравнение системы.
Для оценки динамических свойств механической колебательной системы при одновременном действии двух силовых факторов  может быть использовано понятие передаточной функции межпарциальных связей, что, в определенной степени, отображает так называемые рычажные связи.
может быть использовано понятие передаточной функции межпарциальных связей, что, в определенной степени, отображает так называемые рычажные связи.
Используя выражения (18), (19), найдем, что передаточная функция межпарциальной связи принимает вид

Если числитель и знаменатель (21) будут равны друг другу, то W12(p)=1, что определяет такую форму движения вибростенда, когда реализуются только поступательные вертикальные колебания твердого тела, а угловые колебания «обнуляются». Такие режимы представляют интерес для реализации определенных вибрационных технологических процессов (например, вибрационное упрочнение деталей) [3].
Из выражения (21) следует также, что числитель может принимать «нулевые» значения при частоте

В свою очередь знаменатель (21), также может принимать нулевые значения на частоте

Можно отметить, что при р→0 и р→∞ выражение (21) имеют пределы

Амплитудно-частотные характеристики межпарциальных связей, определяемые на основе выражения (21) в общем виде приведены на фиг. 4.
Для графика (сплошная линия  ), на частоте, определяемой т. (1) имеет разрыв второго рода, что соответствует обнулению знаменателя выражения (21). При частоте, определяемой т. (2) на оси абсцисс, то выражение (21) «обнуляется». При ω→0 и ω→∞ графики отражают наличие предельных значений, которые могут найдены из выражений (24), (25).
), на частоте, определяемой т. (1) имеет разрыв второго рода, что соответствует обнулению знаменателя выражения (21). При частоте, определяемой т. (2) на оси абсцисс, то выражение (21) «обнуляется». При ω→0 и ω→∞ графики отражают наличие предельных значений, которые могут найдены из выражений (24), (25).
Работа с вибрационными полями, подобными приведенными на фиг. 4, не всегда является рациональным, поскольку, изменения параметров системы могут приводить к существенным изменениям условий реализации технологических процессов.
3. Если в выражении (21) принять, что  , то это дает возможность записать следующие условия
, то это дает возможность записать следующие условия

Откуда следует, что

Выражение (27) преобразуется к виду

Условие реализации только поступательного движения можно найти, полагая, что
Таким образом

Откуда следует, что

Зная  можно найти
можно найти 
Выбор параметров при выполнении условий (30), (31) обеспечивает выполнение движений при соблюдении соотношения 
Для детализации представлений об особенностях амплитудно-частотных характеристик, решается модельная задача при параметров: а=0.4; b=0.6; с=1; М=1000 кг; J=400 кг.м2; m1=120 кг; m2=80 кг; k1=900 кН/м; k2=1100 кН/м; k10=k20=500 кН/м. С данными параметрами можно получить i1=2.05, i2=1.95. Амплитудно-частотные характеристики межпарциальных связей приводятся на фиг. 5, а и б. Показано, что изменяя значения передаточных отношений рычажных механизмов, можно существенным образом менять вид амплитудно-частотных характеристик, которые при определенных значениях i1 и i2 превращаются в специфичную амплитудно-частотную характеристику однородного вибрационного поля. Для получения такой структуры вибрационного поля необходима соответствующая настройка вибрационной технологической машины.
4. Интересен другой подход. Если m1=0 и k10=0


Если m2=0 и i2=0


Из выражений (38), (39) можно получить необходимое соотношение массы m1 и жесткости k10, что определяется выражением

Полагая, что данные для модельной задачи составляют данные для расчетов а=0.4; b=0.6; с=1; М=1000 кг; J=400 кг.м2; m2=80 кг; k1=900 кН/м; k2=1100 кН/м; k10=500 кН/м; m1=500 кг. Построим амплитудно-частотные характеристики межпарциальных связей, что приведены на фиг. 6, а и б.
Из графиков на фиг. 6, а и б следует, что при отсутствии одного из устройств для преобразования движения (в частности m2=0), также возможна настройка вибрационного поля на однородную структуру  . Также показаны возможные вариации форм амплитудно-частотных характеристик при изменениях передаточных отношений i1 и i2 рычажных механизмов. Показано, что близкие к однородным вибрационными полям результаты могут быть получены не только в критических соотношениях, распространяющихся на все частоты, но и в локальных частотных диапазонах, когда соотношения амплитуд будут достаточно близки к значению, равному единице.
. Также показаны возможные вариации форм амплитудно-частотных характеристик при изменениях передаточных отношений i1 и i2 рычажных механизмов. Показано, что близкие к однородным вибрационными полям результаты могут быть получены не только в критических соотношениях, распространяющихся на все частоты, но и в локальных частотных диапазонах, когда соотношения амплитуд будут достаточно близки к значению, равному единице.
На фиг. 7 отображена ситуация вариативности амплитудно-частотных характеристик системы при различных сочетаниях i1 и i2.
Научные работы, на основе которых было разработано теоретическое обоснование, приведены в списке литературы.
Список литературы
1. Блехман И.И. Вибрационная механика. М.: Наука. 1994. - 400 с.
2. Быховский И.И. Основы теории вибрационной техники. М.: Машиностроение, 1969. 364 с.
3. - Повидайло В.А. Вибрационные устройства в машиностроении. М.; Киев: Машгиз. [Юж. отд-ние], 1962. - 111 с.
4. Вайсберг Л.А. Вибрационное грохочение сыпучих материалов. Моделирование процессов и технологический расчет грохотов / Л.А. Вайсберг, Л.Г. Рубисов // Механобр. СПБ. 1994. - 45 с.
5. Гончаревич И.Ф., Фролов К.В. Теория вибрационной техники и технологии. Москва: Наука, 1981. - 319 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство коррекции динамического состояния рабочего органа вибрационной технологической машины и способ для его осуществления | 2020 |
|
RU2749987C1 |
| Способ изменения и настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2710314C1 |
| Способ настройки распределения амплитуд колебаний рабочего органа вибростенда и устройство для его осуществления | 2018 |
|
RU2695899C1 |
| Устройство управления динамическим состоянием вибрационной технологической машины | 2020 |
|
RU2751169C1 |
| Устройство формирования и управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2753843C1 |
| Устройство формирования специфических режимов динамического состояния рабочего органа вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2756393C1 |
| Устройство настройки, коррекции, формирования и управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2751042C1 |
| Устройство настройки, корректировки и формирования динамического состояния вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2755646C1 |
| Способ управления динамическим состоянием технического объекта при вибрационных воздействиях и устройство для его осуществления | 2018 |
|
RU2696506C1 |
| Устройство для формирования вибрационного перемещения рабочей среды | 2021 |
|
RU2773825C1 |
Группа изобретений относится к области машиностроения. При корректировке распределения амплитуд колебаний рабочего органа создают двумя вибровозбудителями плоское колебательное движение. Вибровозбудители устанавливают на концах рабочего органа. Вводят по обе стороны рабочего органа рычажные механизмы второго рода. Регулируют длины рычажных механизмов и жесткость упругих элементов. Изменяют приведенную жесткость системы для достижения необходимого уровня амплитуд рабочего органа. Устройство содержит рабочий орган, снабженный двумя симметрично расположенными рычажными механизмами второго рода. Механизмы второго рода на свободных концах имеют дополнительные пригрузы. Дополнительные пригрузы выполнены с возможностью изменения масс. Передаточные отношения рычагов изменяют жесткость упругого элемента между пригрузом и опорной поверхностью посредством изменения длины плеч рычагов. Достигается возможность корректировки распределения амплитуд рабочего органа. 2 н.п. ф-лы, 7 ил.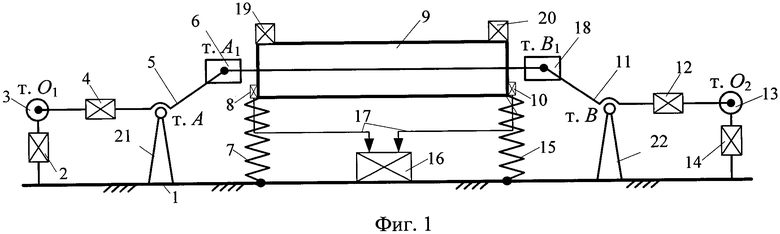
1. Способ корректировки распределения амплитуд колебаний рабочего органа вибрационного технологического стенда, включающий создание двумя вибровозбудителями, установленными на концах рабочего органа, совершения рабочим органом вибрационного стенда плоского колебательного движения, отличающийся тем, что вводят по обе стороны рабочего органа рычажные механизмы второго рода, имеющие неподвижные точки опоры и пригрузы с изменяющимися массами на концах, а также упругие элементы, причем регулируют длины рычажных механизмов и жесткость упругих элементов, тем самым изменяют приведенную жесткость системы для достижения необходимого уровня амплитуд рабочего органа.
2. Устройство для реализации способа по п. 1, отличающееся тем, что рабочий орган снабжен двумя симметрично расположенными рычажными механизмами второго рода, имеющими на свободных концах дополнительные пригрузы, массы которых могут целенаправленно изменяться, а также устройства для изменения длин плеч рычагов, позволяющих настраивать передаточные отношения рычагов при имеющейся возможности изменять жесткость упругого элемента между пригрузом и опорной поверхностью, что, в целом, обеспечивает для рабочего органа вибростенда работу с безрезонансной и не зависящей от частоты внешнего возбуждения амплитудно-частотной характеристикой.
| Способ получения борной кислоты | 1951 |
|
SU98792A1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ ПИЛОТА ВЕРТОЛЕТА И ПОДВЕСКА СИДЕНЬЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2015 |
|
RU2597042C1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

