Изобретение относится к способу для управления подъемной машиной, особенно для шахтной подъемной установки, содержащей привод с соответствующим устройством управления, опору каната, по меньшей мере один подъемный канат и по меньшей мере одну расположенную на подъемном канате подъемную вагонетку для вертикальной транспортировки транспортируемого материала. Кроме того, изобретение относится к подъемной машине, а также к устройству управления для управления приводом подъемной машины.
Подобные подъемные машины известны, например, из DE 10 2004 058 757 A1. В этом известном уровне техники описывается шахтная подъемная установка, которая имеет канатный блок (шкив), соединенный с двигателем, который направляет подъемный канат для подъемного средства. Кроме того, шахтная подъемная установка оснащена по меньшей мере одним счетчиком импульсов, который определяет выводимое из вращательного движения текущее значение пути и текущее значение скорости подъемного средства. Кроме того, шахтная подъемная установка управляется и/или контролируется посредством электрической системы автоматизации, причем система автоматизации для ее работы имеет цифровой регулятор скорости подъема для вычисления заданных значений для регулирования двигателя.
В подъемных машинах для горной промышленности, как правило, существует проблема, состоящая в том, что, во время загрузки подъемной вагонетки, подъемный канат из-за увеличения веса подъемной вагонетки растягивается частично на 1,5 м или более. Это значение зависит от длины подъемного каната, полезной нагрузки и количества подъемных канатов. В принципе, цель всех производителей подъемных машин состоит в том, чтобы поддерживать время загрузки по возможности коротким. Поэтому растяжение подъемного каната во время работы шахтной подъемной установки происходит в интервале времени в несколько секунд. При разгрузке подъемной вагонетки, из-за снижения веса, подъемный канат вновь стягивается за короткий интервал времени.
Длины подъемных канатов влекут за собой ряд недостатков. Подъемная вагонетка и, тем самым, подъемный канат начинают вертикально колебаться. Кроме того, подъемная вагонетка в процессе загрузки перемещается вниз из оптимального положения загрузки. Возникают также вторичные эффекты: колеблющийся подъемный канат отрицательно влияет на регулирование скорости и момента привода, и может оказываться негативное влияние на срок службы подъемного каната. Из-за вертикальных колебаний может потребоваться удлинить путь с замедленной (ползучей) скоростью или уменьшить ускорение, чтобы минимизировать износ механизмов или избежать повреждений. Кроме того, могут возникать и горизонтальные колебания во время движения в шахте. Что касается процессов загрузки и выгрузки, может происходить то, что когда подъемная вагонетка находится в неоптимальном положении, материал в подъемной вагонетке может падать мимо в шахту.
Таким образом, в основе изобретения лежит задача обеспечить выравнивание по высоте подъемной вагонетки при загрузке и выгрузке подъемной вагонетки подъемной машины.
Указанная задача в соответствии с изобретением решается способом для управления подъемной машиной, особенно для шахтной подъемной установки, содержащей привод с соответствующим устройством управления, опору каната, по меньшей мере один подъемный канат и по меньшей мере одну расположенную на подъемном канате подъемную вагонетку для вертикальной транспортировки транспортируемого материала, причем во время загрузки или выгрузки по меньшей мере одной подъемной вагонетки, привод остается включенным, и для компенсации изменения длины подъемного каната, угол поворота опоры каната непрерывно регулируется на основе предопределенной характеристики угла поворота.
Кроме того, указанная задача в соответствии с изобретением также решается подъемной машиной, особенно для шахтной подъемной установки, содержащей привод с устройством управления, подходящим для осуществления такого способа.
Наконец, указанная задача в соответствии с изобретением также решается устройством управления для управления приводом подъемной машины, особенно для шахтной подъемной установки, подходящим для выполнения такого способа.
Преимущества и предпочтительные варианты осуществления, изложенные ниже в отношении способа, могут быть перенесены аналогичным образом на привод и устройство управления.
Изобретение основано на том соображении, что вертикальное смещение подъемной вагонетки относительно положения загрузки вследствие растяжения (удлинения) подъемного каната может быть скомпенсировано тем, что подъемная вагонетка с соответствующей скоростью перемещается в направлении к приводу. При выгрузке подъемной вагонетки, наоборот, подъемная вагонетка может перемещаться от привода, потому что подъемный канат вновь стягивается из-за уменьшающейся нагрузки. При этом в качестве регулирующего воздействия для управления подъемной машиной задается угол поворота или заданное значение скорости опоры каната, так что длина подъемного каната изменяется за счет поворота опоры подъемного каната. Таким образом, подъемная вагонетка остается в своем оптимальном положении загрузки и не возбуждает никакого вертикального колебания.
Чтобы сделать это возможным, во время процесса загрузки или выгрузки, привод или инвертор (преобразователь) подъемной машины остается включенным. В частности, механическое тормозное устройство не вводится в действие, так что предотвращается износ тормозных элементов. Таким образом, исключаются времена нечувствительности, возникающие в результате включения и отпускания тормозного устройства, и уменьшается длительность цикла подъема.
Требуемая для этого компенсационного процесса характеристика угла поворота опоры каната предварительно определяется и сохраняется в памяти. В частности, сохраняется кривая заданных значений скорости, на основе которой вычисляется характеристика заданного момента, которая применяется к приводу во время процесса загрузки или выгрузки. Привод, в свою очередь, управляет опорой каната относительно изменения угла поворота.
За счет того, что компенсация растяжения подъемного каната осуществляется техникой автоматического управления, заявленный способ характеризуется, в частности, точными заданными значениями и простотой модернизации и калибровки. Другое преимущество состоит в том, что заданный крутящий момент (удерживающий момент) нарастает относительно медленно. Нарастание момента происходит равномерно в течение 20-30 секунд (для сравнения, нарастание крутящего момента при размыкании тормозного устройства обычно осуществляется примерно за 200 мс). В результате ударная нагрузка, как для электрической системы (трансформатора, инвертора, двигателя), так и для механических компонентов подъемной машины, снижается.
В соответствии с предпочтительным вариантом осуществления, характеристика угла поворота определяется за счет того, что сначала приводится в действие тормозное устройство подъемной машины, и в процессе загрузки или выгрузки по меньшей мере одной подъемной вагонетки измеряется изменение длины подъемного каната, и на этой основе вычисляется характеристика угла поворота для опоры каната. При этом вертикальное смещение подъемной вагонетки компенсируется приводом в рамках управляемого движения без установки дополнительных датчиков, которые измеряют фактические значения для подъемной машины. Этот способ применим к большинству подъемных машин, поскольку процесс загрузки обычно всегда один и тот же, и загрузка происходит приблизительно линейно.
В целях упрощения способа и экономии времени, измерение изменения длины подъемного каната выполняется во время работ по установке или техническому обслуживанию. Таким образом, не требуется непрерывное определение смещения подъемных вагонеток, а компенсирующая характеристика угла поворота определяется прямо и косвенно, то есть как те или другие связанные с ней величины и параметры, например, однократно при вводе в эксплуатацию подъемной машины и сохраняется в памяти. К более позднему моменту времени, во время работ по техническому обслуживанию и ремонту на подъемной машине, полученные данные могут быть заново откалиброваны.
Может случиться так, что, из-за разной высоты подъемной вагонетки при загрузке и выгрузки в этих положениях, удлинение и снятие напряжения (разгрузка) подъемного каната отличаются друг от друга. С целью оптимальной компенсации этих различных подлежащих компенсации длин, предпочтительным образом, измеряется первое измеряемое значение для изменения длины подъемного каната при загрузке по меньшей мере одной подъемной вагонетки, затем измеряется второе измеряемое значение для изменения длины подъемного каната при выгрузке по меньшей мере одной подъемной вагонетки, и при отклонении между обоими измеренными значениями определяется среднее значение обоих измеренных значений в качестве подлежащего компенсации изменения длины подъемного каната.
Рациональным образом, подъемная машина имеет по меньшей мере две подъемные вагонетки, и компенсация изменения длины подъемного каната выполняется для всех подъемных вагонеток. Таким образом, гарантируется особенно безопасная и эффективная эксплуатация подъемной машины.
Предпочтительным образом, подъемная машина имеет две подъемные вагонетки, и загрузка одной из подъемных вагонеток и выгрузка другой подъемной вагонетки осуществляются одновременно. За счет этого возникает особенно предпочтительный синергетический эффект, при котором посредством одного единственного компенсационного движения привода обеспечивается противодействие как удлинению подъемного каната на стороне загружаемой подъемной вагонетки, так и стягиванию подъемного каната на стороне выгружаемой подъемной вагонетки.
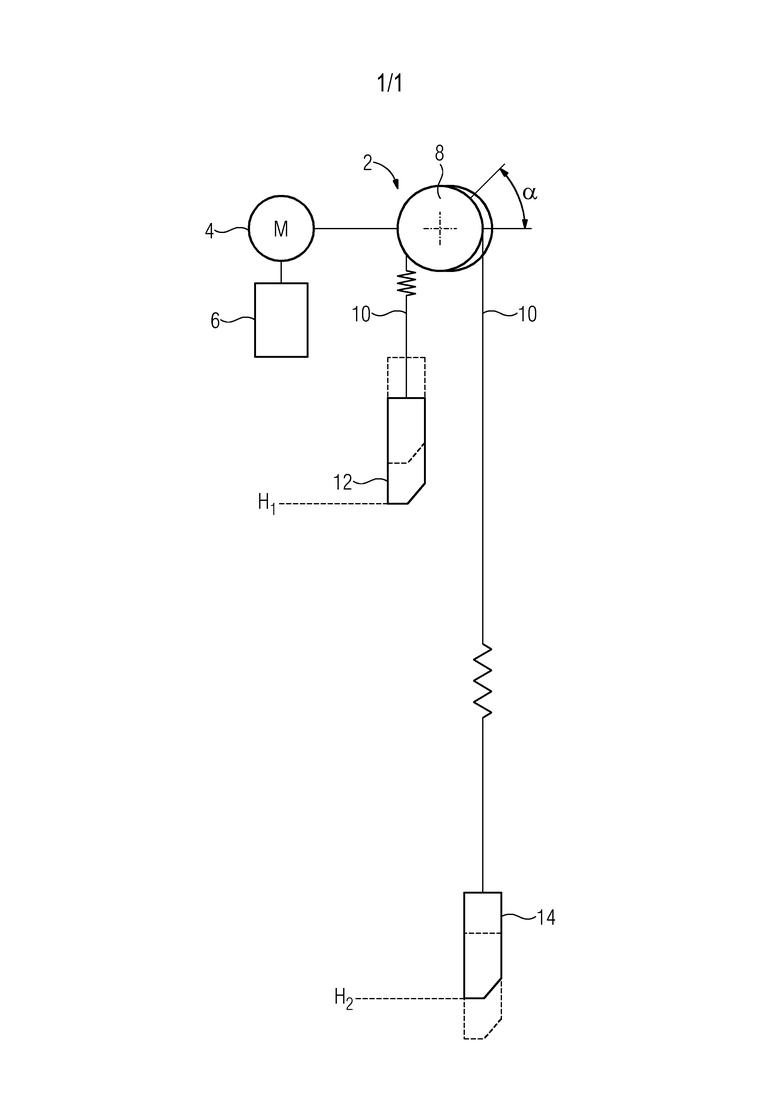
Пример выполнения поясняется более подробно со ссылками на чертеж. На чертеже показана в сильно упрощенной форме подъемная машина 2 для шахтной подъемной установки. Подъемная машина имеет привод 4, который управляется устройством 6 управления. Подъемная машина 2 включает в себя в показанном примере выполнения также опору 8 каната, которая приводится в движение приводом 4, а также подъемный канат 10 с двумя подъемными вагонетками 12, 14 для вертикальной транспортировки не показанного здесь транспортируемого (добываемого) материала, например, угля или руды. Подъемные вагонетки 12, 14 также могут использоваться для транспортировки людей.
В показанном примере выполнения иллюстрируется только один подъемный канат. Однако для подвески соответствующей подъемной вагонетки 12, 14 может использоваться несколько подъемных канатов.
При этом подъемная машина 2 подходит для транспортировки транспортируемого материала на расстояние от 200 м до 4000 м в шахте, не показанной подробно. Во время работы, подъемные вагонетки 12, 14 обычно загружаются поочередно в нижней точке останова Н2 в шахте, транспортируются наверх и выгружаются в верхней точке останова H1. При этом до 80 т загружается или выгружается со скоростью примерно 1 т/с.
На чертеже показана ситуация, при которой подъемная вагонетка 12 на левой стороне подъемной машины 2 выгружается, а подъемная вагонетка 14 на правой стороне одновременно загружается. За счет выгрузки подъемной вагонетки 12, вес на этой стороне опоры 8 каната уменьшается, так что силы, действующие на подъемный канат 10, постепенно снижаются, и подъемный канат 10 стягивается, так что подъемная вагонетка 12 по вертикали оказалась бы в более высоком положении, представленном пунктирными линиями. Это обозначено на чертеже расслабленной (разгруженной) пружиной в области подъемного каната 10 выше подъемной вагонетки 12.
На правой стороне опоры 8 каната при одновременной загрузке подъемной вагонетки 14 осуществляется подобный процесс, однако в противоположном направлении. Из-за постоянно возрастающего веса в подъемной вагонетке 14 на подъемный канат 10 действует все возрастающая сила, направленная вниз, так что подъемный канат 10 растягивается, что символически представлено натянутой (напряженной) пружиной. В зависимости от длины подъемного каната и веса транспортируемого материала, подъемный канат может удлиниться на величину до 1,5 м. При этом без внешнего воздействия, подъемная вагонетка 14 занимала бы более низкое положение, которое показано пунктирными линиями на чертеже.
Для того чтобы противодействовать изменению длины подъемного каната при выгрузке подъемной вагонетки 12, опора 8 каната посредством привода 4, еще включенного в процессе разгрузки, поворачивается так, что с той же скоростью, с которой подъемная вагонетка 12 перемещается ʺвверхʺ, подъемная вагонетка 12 опускается вниз от опоры 8 каната. Для этого привод 4 остается активным во время загрузки или выгрузки. В частности, тормозное устройство подъемной машины 2, подробно не показанное здесь, не приводится в действие. Устройство 6 управления непрерывно нагружает привод 4 предопределенным заданным крутящим моментом, который влечет за собой вращение опоры 8 каната. Движение опоры 8 каната показано на чертеже углом α. Вращение опоры 8 каната на угол α приводит к тому, что во время выгрузки, несмотря на все более укорачивающийся подъемный канат 10, подъемная вагонетка 12 всегда остается в том же самом вертикальном положении H1.
Удлинение каната на стороне загружаемой подъемной вагонетки 14 компенсируется тем, что при все еще активном приводе 4 подъемная вагонетка 14 с соответствующей скоростью перемещается в направлении к опоре 8 каната. Результатом этого компенсационного перемещения опоры 8 каната является то, что подъемная вагонетка 14 также во время всего процесса загрузки остается в том же вертикальном положении Н2.
В показанном примере выполнения, обе подъемные вагонетки 12, 14 загружаются или разгружаются параллельно, поэтому поворот опоры 8 каната на угол α является достаточным, чтобы одновременно компенсировать изменения длины подъемного каната с обеих сторон опоры 8 каната. При этом заданный крутящий момент, возможно, будет изменять свое направление во время этого процесса.
В среднем, подъемный канат 10 растягивается примерно на 1 метр на 1000 м длины каната. Загрузка длится примерно от 0,5 до 1 с на тонну. Таким образом, подъемная машина 2 перемещается со скоростью примерно 0,05 м/сек за примерно 20 секунд.
Если подъемная машина 2 имеет множество подъемных вагонеток 12, 14, и загрузка или выгрузка осуществляется неодновременно, привод управляется попеременно, чтобы компенсировать соответствующее вертикальное смещение подъемной вагонетки, которая используется в данный момент. То же самое относится к подъемной машине 2 только с одной подъемной вагонеткой и противовесом: в соответствии с положением Н1, Н2 подъемной вагонетки, направление вращения опоры 8 каната изменяется.
Если как растяжение, так и разгрузка подъемного каната 10 относительно подъемных вагонеток 12, 14 измеряется, то может случиться так, что из-за разной высоты Н1, Н2 подъемной вагонетки при загрузке и при выгрузке удлинение и разгрузка подъемного каната отличаются друг от друга. Поэтому измеряется, в частности, первое измеряемое значение для изменения длины подъемного каната во время загрузки, затем измеряется второе измеряемое значение для изменения длины подъемного каната 10 во время выгрузки, и при отклонении обоих измеренных значений формируется среднее значение обоих измеренных значений, которое рассматривается в качестве значения, подлежащего компенсации.
Угол поворота α, требуемый для компенсации изменения длины подъемного каната 10, определяется однократно или с большими временными интервалами порядка нескольких сотен часов работы и сохраняется в памяти для нормальной работы подъемной установки 2 в форме параметра для регулирования пути подъемной машины 2. Для этой цели сначала измеряется растяжение подъемного каната 10. Измерение может быть выполнено во время процесса загрузки. Дополнительно или альтернативно, можно измерить стягивание подъемного каната 10 во время процесса выгрузки. На основе информации о растяжении подъемного каната 10 за время загрузки и/или выгрузки в показанном примере выполнения определяется кривая заданных значений скорости (пути во времени), которая образует основу для управления приводом во время работы подъемной машины 2. На основе кривой заданных значений скорости, устройство 6 управления вычисляет характеристику заданного крутящего момента для привода 4, которая применяется к приводу 4 в процессе работы.
Ввиду остающегося постоянным положения подъемных вагонеток 12, 14, в частности, не индуцируются вертикальные колебания, соответственно осуществляется безвибрационный пуск подъемной машины 2 в начале каждого следующего цикла подъема. Также снижаются нагрузки на канаты. Кроме того, описанный способ приводит к увеличению производительности, поскольку интервалы времени нечувствительности, связанные с включением и отпусканием механического тормозного устройства, отсутствуют, и возможен быстрый пуск.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАШИНА ДЛЯ ВЫЕМКИ МАТЕРИАЛА ИЗ ШАХТНОЙ ВАГОНЕТКИ, ВЫПОЛНЕННАЯ НА ОСНОВЕ ПОДЪЕМНОГО МЕХАНИЗМА СО СТАЛЬНЫМ КАНАТОМ | 2015 |
|
RU2637062C1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ТОРМОЖЕНИЕМ ШАХТНОЙ ПОДЪЕМНОЙ МАШИНЫ | 1992 |
|
RU2041152C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНОЙ МАШИНОЙ, ЗАПОМИНАЮЩАЯ СРЕДА И СИСТЕМА ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2012 |
|
RU2597052C2 |
| ШАХТНАЯ ПОДЪЕМНАЯ МАШИНА | 2019 |
|
RU2711826C1 |
| Устройство контроля клети шахтной подъемной установки | 1987 |
|
SU1502452A1 |
| Привод шахтной подъемной машины | 1988 |
|
SU1671596A1 |
| КАНАТНО-РЕЛЬСОВАЯ ДОРОГА (ВАРИАНТЫ) | 1998 |
|
RU2135379C1 |
| СПОСОБ КОНТРОЛЯ ПРОХОЖДЕНИЯ ВАГОНЕТКИ В УСТАНОВКЕ ДЛЯ ПЕРЕВОЗОК ПО ПОДВЕСНОЙ КАНАТНОЙ ДОРОГЕ | 2010 |
|
RU2526330C2 |
| Устройство для удержания партии вагонеток в наклонной выработке | 1988 |
|
SU1666763A1 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗОМ ПОДЪЕМНОЙ МАШИНЫ (ВАРИАНТЫ) И ПОДЪЕМНАЯ МАШИНА | 2005 |
|
RU2460912C2 |
Изобретение относится к способу для управления подъемной машиной (2), особенно для шахтной подъемной установки, содержащей привод (4) с соответствующим устройством (6) управления, опору (8) каната, по меньшей мере один подъемный канат (10) и по меньшей мере одну расположенную на подъемном канате (10) подъемную вагонетку (12, 14) для вертикальной транспортировки транспортируемого материала. Во время загрузки подъемной вагонетки (12, 14) подъемный канат (10) растягивается из-за увеличения веса подъемной вагонетки (12, 14). При выгрузке подъемной вагонетки (12, 14) подъемный канат (10) снова стягивается. Чтобы обеспечить компенсацию по высоте во время загрузки и выгрузки по меньшей мере одной подъемной вагонетки, привод (4) остается включенным во время загрузки или выгрузки, и для компенсации изменения длины подъемного каната, угол поворота (α) опоры (8) каната непрерывно регулируется на основе предопределенной характеристики угла поворота. 3 н. и 3 з.п. ф-лы, 1 ил.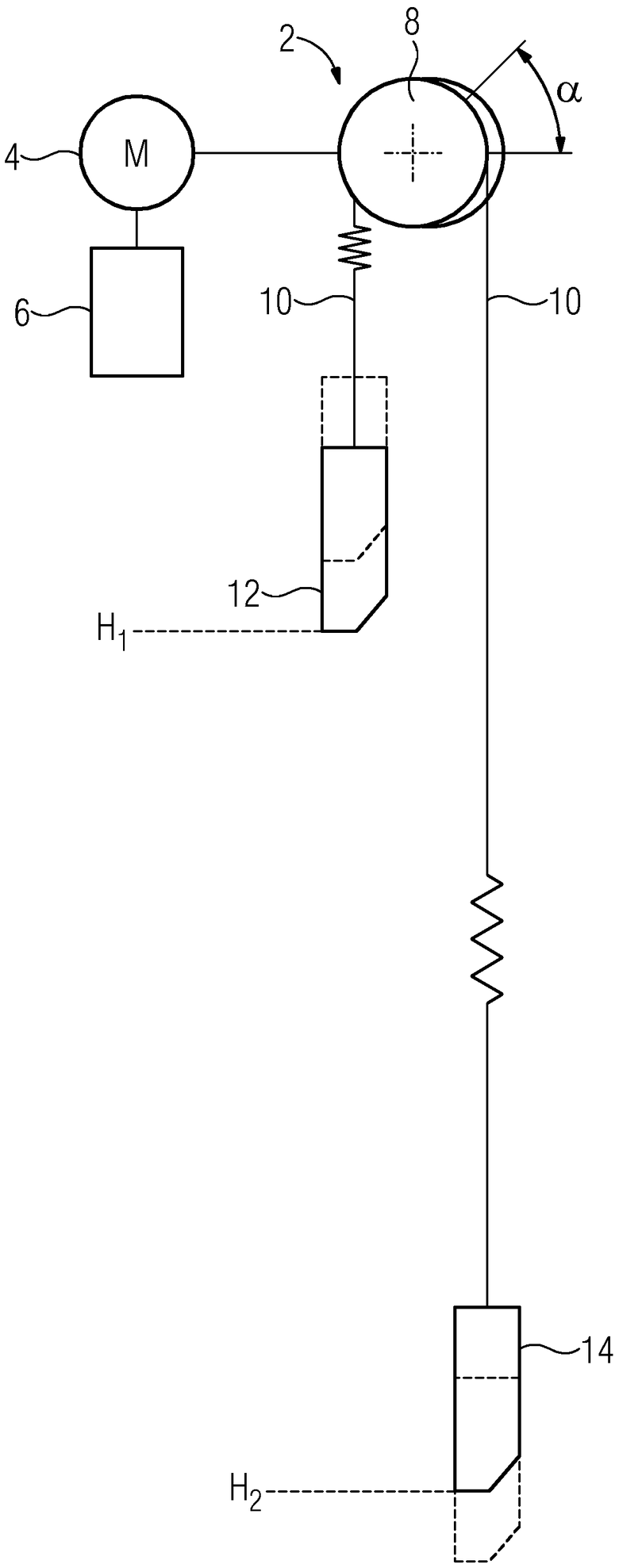
1. Способ для управления подъемной машиной (2), особенно для шахтной подъемной установки, содержащей привод (4) с соответствующим устройством (6) управления, опору (8) каната, по меньшей мере один подъемный канат (10) и по меньшей мере одну расположенную на подъемном канате (10) подъемную вагонетку (12, 14) для вертикальной транспортировки транспортируемого материала, причем во время загрузки или выгрузки по меньшей мере одной подъемной вагонетки (12, 14) привод (4) остается включенным, и для компенсации изменения длины подъемного каната угол поворота (α) опоры (8) каната непрерывно регулируется на основе предопределенной характеристики угла поворота,
отличающийся тем, что при определении характеристики угла поворота сначала приводят в действие тормозное устройство подъемной машины (2), и при загрузке или выгрузке по меньшей мере одной подъемной вагонетки (12, 14) измеряют изменение длины подъемного каната, и на этой основе вычисляют характеристику угла поворота для опоры (8) каната.
2. Способ по п. 1, отличающийся тем, что измерение изменения длины подъемного каната выполняют в рамках работ по установке или техническому обслуживанию.
3. Способ по одному из пп. 1 или 2, отличающийся тем, что измеряют первое измеряемое значение для изменения длины подъемного каната при загрузке по меньшей мере одной подъемной вагонетки (12, 14), измеряют второе измеряемое значение для изменения длины подъемного каната при выгрузке по меньшей мере одной подъемной вагонетки, и при отклонении между обоими измеренными значениями определяют среднее значение обоих измеренных значений в качестве подлежащего компенсации изменения длины подъемного каната.
4. Способ по одному из предыдущих пунктов, отличающийся тем, что подъемная машина (2) имеет по меньшей мере две подъемные вагонетки (12, 14), и компенсацию изменения длины подъемного каната выполняют для всех подъемных вагонеток (12, 14).
5. Способ по п. 4, отличающийся тем, что подъемная машина (2) имеет две подъемные вагонетки (12, 14), и загрузку одной из подъемных вагонеток (12, 14) и выгрузку другой подъемной вагонетки (12, 14) осуществляют одновременно.
6. Устройство (6) управления для управления приводом (4) подъемной машины (2), особенно для шахтной подъемной установки, подходящее для выполнения способа по одному из пп. 1-5.
7. Подъемная машина (2), особенно для шахтной подъемной установки, содержащая привод (4) с устройством (6) управления по п. 6.
| US 20050230192 A1, 20.10 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| JP 2010208752 A, 24.09 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| DE 102004058757 A1, 07.07 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КАБИНЫ ЛИФТА И ЛИФТОВАЯ СИСТЕМА | 2008 |
|
RU2482049C2 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |

