Изобретение относится к железнодорожному транспорту, а именно к технике непрерывного контроля качества уплотнения балластного слоя рельсового пути.
Известен способ формирования и уплотнения балластной призмы железнодорожного пути, включающий полную вырезку балласта с последующей его очисткой и отсыпкой им нижнего слоя, который разравнивают и уплотняют, после чего на него отсыпают и уплотняют верхний слой щебня, причем нижний слой щебня отсыпают на толщину 0.7 H<H1≤0.85H1, а верхний слой щебня - на толщину H2=(1.15-1.25)H-H1, где Н -глубина вырезки балласта ниже уровня постели шпалы (патент РФ №2545133, МПК: Е01В 27/02). После укладки каждого слоя производят уплотнение с последовательным воздействием выправочно-подбивочно-отделочной машины непрерывного действия, выправочно-подбивочно-рихтовочной машины (ВПР) и динамического стабилизатора (ДСП). Скорость выправочно-подбивочно-отделочной машины непрерывного действия и динамического стабилизатора выбирают в диапазоне 0.75-1.0 км/ч. Контроль уплотнения балластной призмы осуществляется с помощью, установленной на ДСП контрольно измерительной аппаратуры по величине осадки пути после работы ДСП, для чего контроль проводится в два прохода - один измерительный, другой - рабочий. Сравнение положения пути в продольном профиле до и после работы ДСП позволяет определить осадку обеих рельсовых нитей и произвести оценку общей осадки.
Однако такая технология влечет за собой низкую производительность ремонтных работ.
Известен также способ автоматического контроля работы вибрационного уплотнителя грунта, включающий измерение ускорения вибрационного рабочего органа, усиление полученного сигнала, выделение первой и второй гармоник, выделение амплитуд и определение степени уплотнения, с целью повышения точности контроля, сигнал ускорения стабилизируют по амплитуде первой гармоники путем изменения коэффициента усиления, а о степени уплотнения судят по амплитуде второй гармоники.
Известное устройство для автоматического контроля работы вибрационного уплотнителя грунта, содержит датчик ускорения вибраций, подключенный к входу усилителя, блоки выделения первой и второй гармоник, исполнительный блок, блок коррекции, детектор и дифференциальный интегратор, причем выход усилителя подключен к информационному входу блока коррекции, выход которого соединен с входами блоков выделения первой и второй гармоник, выход блока выделения первой гармоники соединен с входом детектора, выход которого соединен с входом дифференциального интегратора, выход которого подключен к управляющему входу блока коррекции, а выход блока выделения второй гармоники подключен к исполнительному блоку (см. патент РФ №2012702, МПК: E01C 19/28, B28B 1/08).
Данная технология включает преобразование вибрации уплотняющего органа в электрический сигнал с выделением из него основной частоты вибрации и ее уровня, а также с выделением второй гармоники основной частоты вибрации и ее уровня. О степени уплотнения грунта судят по выделенному уровню второй гармоники основной частоты вибрации.
Недостатками упомянутого технического решения являются сложная система обработки данных, что влияет на точность результатов и обуславливает невозможность измерения с высокой степенью достоверности качества уплотнения балласта под рельсошпальной решеткой.
Известна также система автоматического контроля качества уплотнения балластного слоя, которая содержит машину для стабилизации пути, содержащую раму, опирающуюся на ходовые тележки, контрольно-измерительную систему, включающую в себя датчики положения пути и стабилизатор рельсового пути, включающий в себя несущую раму, соединенную с рамой машины гидроцилиндрами, расположенными с обеих сторон от продольной оси машины, и опирающуюся, по меньшей мере, на одну тележку, и один виброблок, установленный на несущей раме, при этом на виброблоке и несущей раме виброблоков установлены вибродатчики, подключенные к бортовому компьютеру (см. патент РФ №2464370, E01B 27/02).
Данное техническое решение основано на изменении амплитуды колебаний виброблока в зависимости от степени уплотнения балласта под рельсошпальной решеткой. При недостаточно уплотненном балласте амплитуда колебаний виброблока будет выше, чем при уплотненном. Для исключения влияния колебаний самой машины, вызванных работой двигателя, трансмиссии и т.д. на колебания виброблока, на машине устанавливаются два вибродатчика: один вибродатчик устанавливается на виброблок, а второй - на несущую раму. Сигнал с вибродатчиков передается на усилитель, с усилителя - на аналогово-цифровой преобразователь и бортовой компьютер, который выделяет чистую амплитуду колебаний виброблока. В случае изменения амплитуды колебаний, а, следовательно, и степени уплотнения балласта изменяется скорость движения динамического стабилизатора пути. Правильное назначение скорости движения машины позволяет добиться одинаковой степени уплотнения, а, следовательно, и равноупругости балласта по длине пути.
Однако данное техническое решение не обладает достаточной степенью точности и достоверности определения степени уплотнения балласта, так как не обеспечивает непосредственный контроль текущих значений показателей, характеризующих качество уплотнения, таких как степень просадки балласта и в связи с этим, снижается качество, оперативность и производительность ремонтных работ.
Задачей изобретения является повышение достоверности определения качества уплотнения балласта железнодорожного пути при проведении ремонтных работ и при планово-предупредительной выправке рельсового пути и повышение, на этой основе, оперативности и производительности данных работ.
Заявленный технический результат достигается за счет того, что в способе автоматического контроля качества уплотнения балластной призмы рельсового пути, осуществляемого путем вибрационного воздействия на уплотняемый балласт, регистрации величины его просадки, при уплотнении балласта осуществляют синхронное измерение пространственных координат текущих значений величины просадки, в зоне уплотнения ремонтируемого рельсового пути, и в его уплотненной зоне, по получаемым пространственным координатам определяют фактическое значение коэффициента уплотнения балласта. При этом скорость движения машины, осуществляющей вибрационное воздействие на уплотняемый балласт, регулируют в зависимости от фактического значения коэффициента уплотнения в каждый текущий момент.
Техническим результатом изобретения является измерение в процессе уплотнения балласта непосредственных значений его просадки, за счет непрерывных, синхронных измерений ее текущих, высотных отметок, расположенных на уплотненных и неуплотненных участках ремонтируемого пути по ходу движения машины для стабилизации пути, путем сравнения значений их соответствующих высотных отметок.
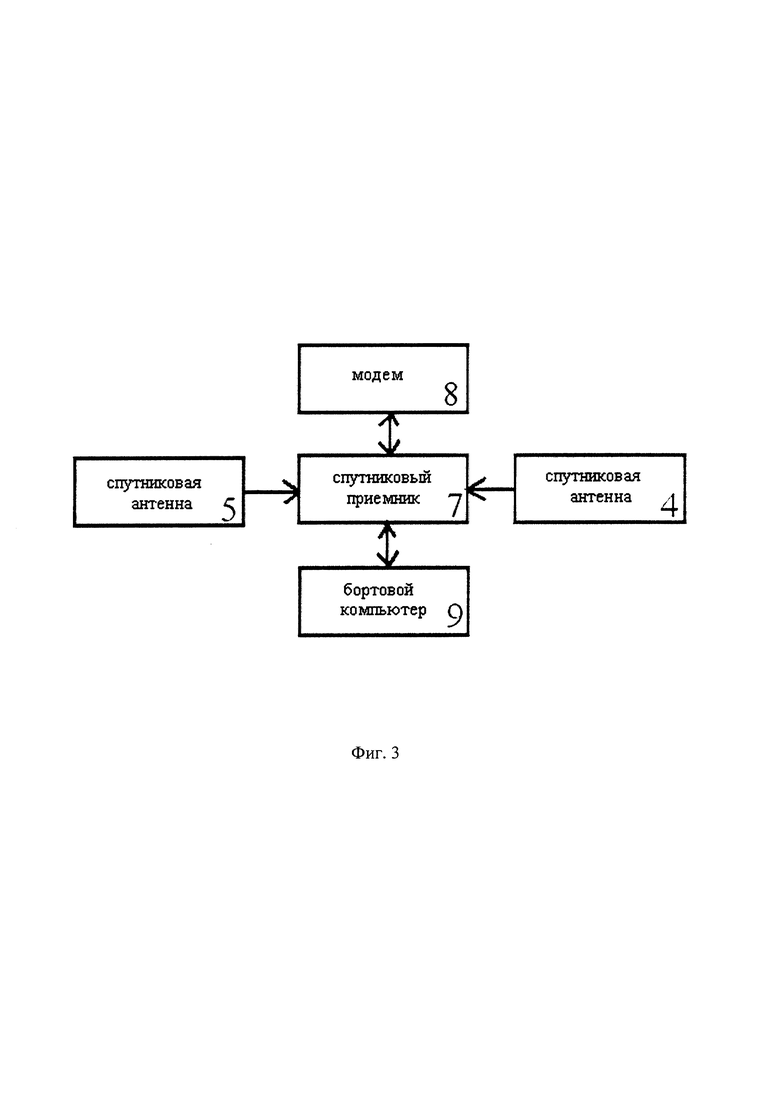
Заявленный технический результат достигается также тем, что система для автоматического контроля качества уплотнения балласта рельсового пути содержит машину для стабилизации пути, содержащую раму, опирающуюся на ходовые тележки, виброблок, установленный на несущей раме, установленные на виброблоке вибродатчики, подключенные к бортовому компьютеру, контрольно-измерительную систему, снабжена двумя спутниковыми антеннами, приемником спутниковой системы позиционирования и модемом, причем антенны установлены соответственно, в передней и задней, по ходу движения машины, части указанной рамы, их выходы соединены с соответствующими входами приемника спутниковой системы позиционирования, первый и второй вход - выходы которого связаны соответственно с указанным бортовым компьютером и модемом, принимающим сигналы базовой спутниковой станции.
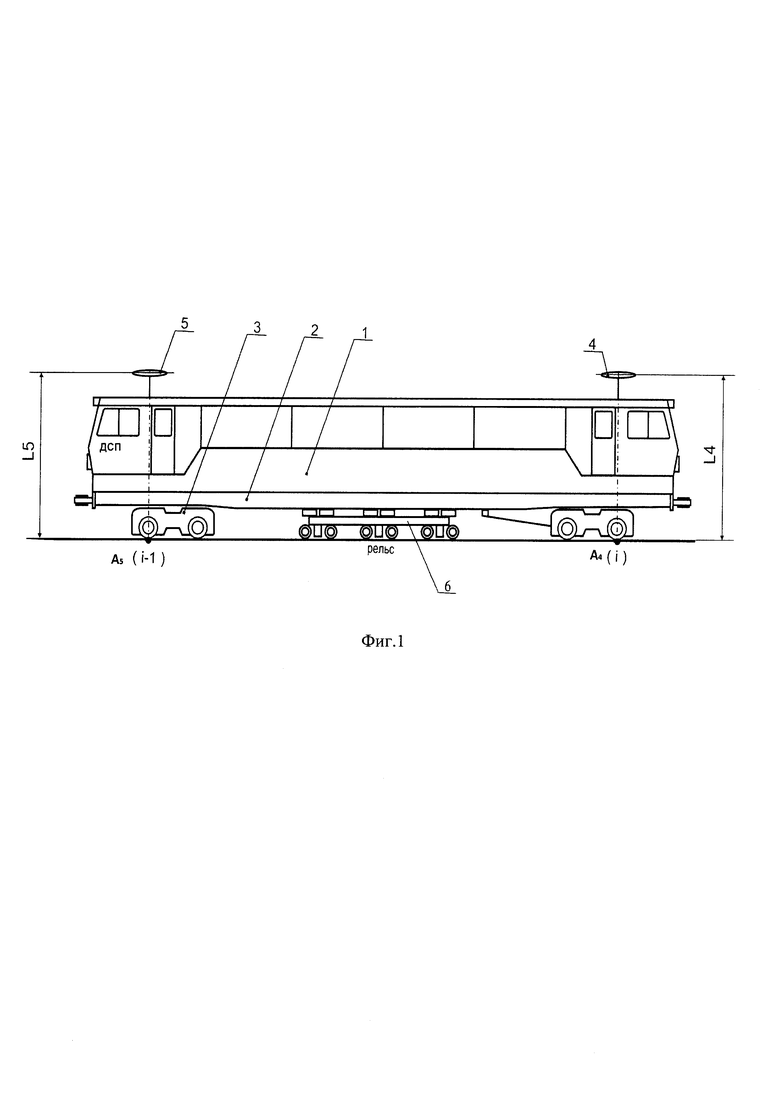
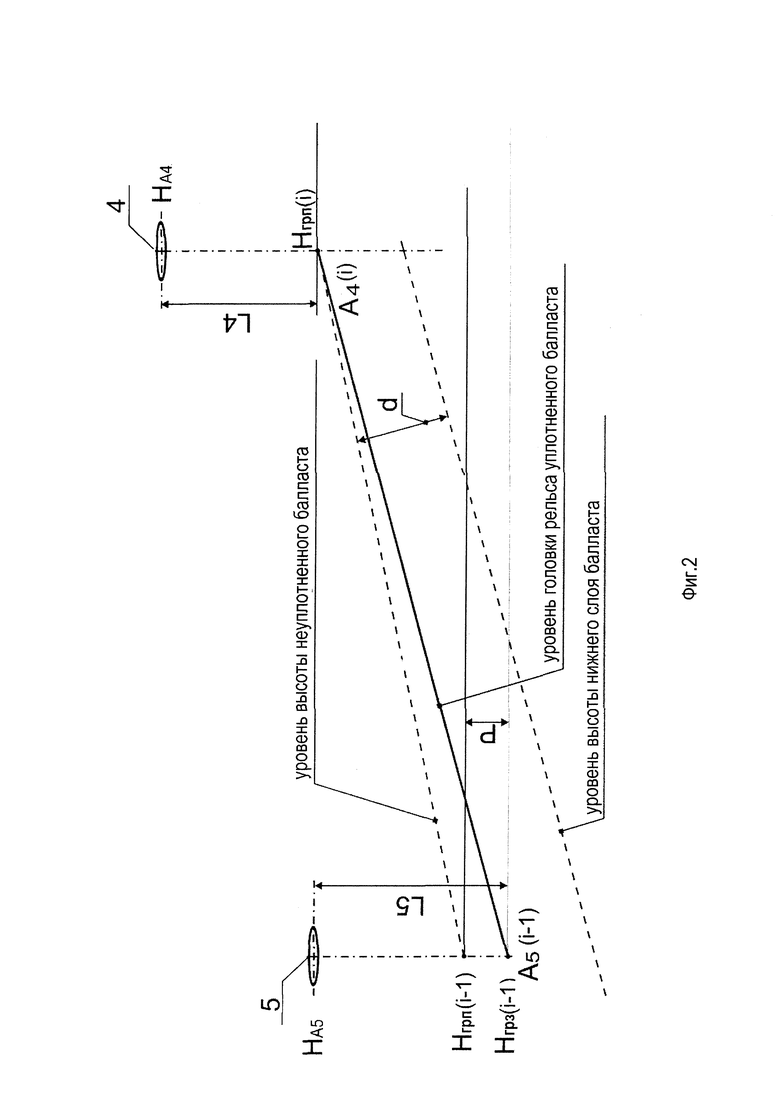
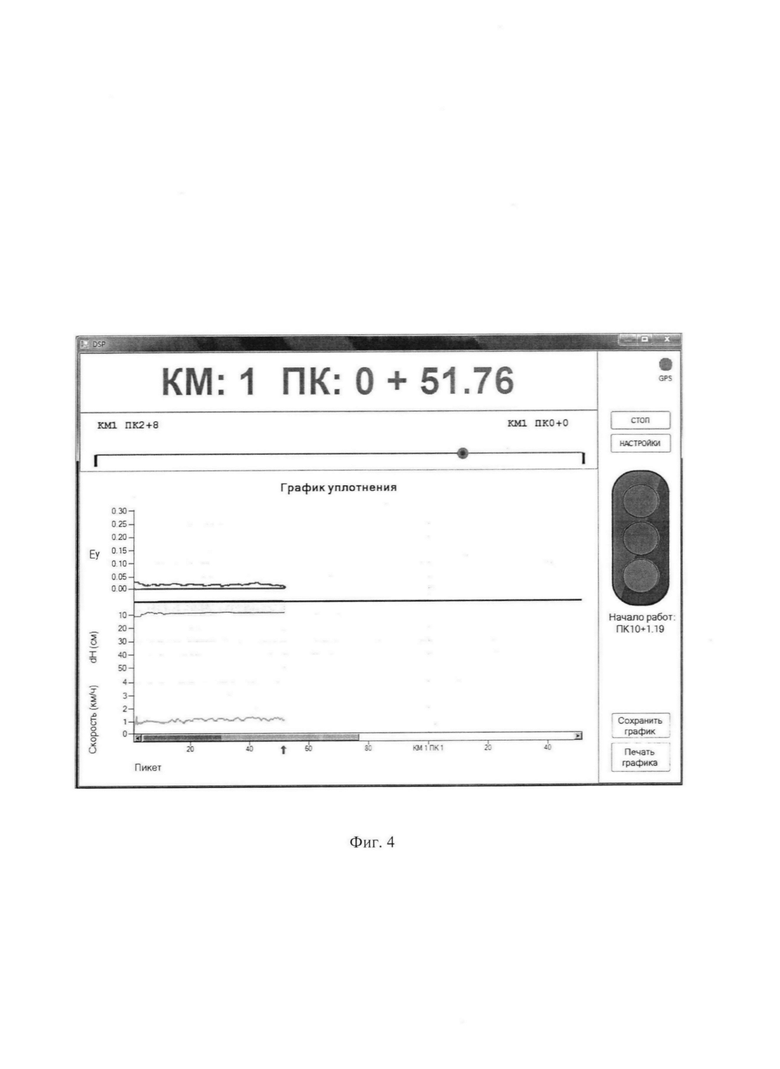
На фиг. 1 схематично показан общий вид устройства, фиг. 2 иллюстрирует принцип определения просадки и степени уплотнения балласта, на фиг. 3 представлена структурная схема контрольно-измерительной системы устройства, на фиг. 4 приведен фрагмент визуализируемых данных, иллюстрирующий конкретную реализацию способа.
Устройство включает машину 1, содержащую несущую раму 2, опирающуюся на ходовые тележки 3, установленные в верхней части рамы 2 с возможностью радиовидимости на навигационные спутники спутниковые антенны 4 и 5, виброблок 6 с вибродатчиками для настройки амплитудно-частотных характеристик работы виброблока, подключенными к бортовому компьютеру, контрольно-измерительную систему, включающую спутниковый приемник 7, связанный через модем 8 со спутниковой референц-сетью или временными базовыми станциями (на черт, не показано) и бортовым компьютером 9. Спутниковая антенна 4 установлена в передней части машины 1, а спутниковая антенна 5 - в задней части указанной машины 1. Антенны 4 и 5 относительно головки рельса зафиксированы на высоте L4, L5 соответственно и связаны с соответствующими входами спутникового приемника 7, первый вход-выход которого через модем 8 связан со спутниковой референц-сетью для получения дифференциальных поправок, а другой вход-выход связан с бортовым компьютером 9. Спутниковый приемник 7, модем 8 и бортовой компьютер 9 расположены в кабине машины 1.
В качестве спутниковой аппаратуры позиционирования может быть использован спутниковый приемник LeicaICON-80 с двумя антеннами, синхронно измеряющими пространственные координаты (X, У, Н) и текущее время.
При проведении работ по уплотнению балласта в ходе движения машины 1, виброблок с помощью вибродатчиков предварительно настраивается на заданные (из технического паспорта ДСП) амплитудно-частотные характеристики и в данном режиме уплотняет балласт, спутниковый приемник 7 через модем 8 связывается со спутниковой референц - сетью или временной базовой станцией, установленной на репере участка ремонта железной дороги. На несущую раму 2 машины 1 (ДСП) устанавливают две спутниковые антенны, в передней части рамы 2, антенну 4, и в ее задней части, антенну 5. Измеряют расстояния L4 и L5 указанных антенн 4, 5 до условных точек А4 и А5 соответственно, на головке рельса (фиг. 2). Данные промеров вводят в бортовой компьютер 9. До начала работ в бортовой компьютер 9 экспортируются также данные толщины d слоя балласта. С помощью компьютерной программы осуществляется расчет и визуализация в автоматическом режиме текущих основных параметров процесса уплотнения: коэффициента Еу уплотнения, величины просадки, скорости движения машины, текущее местоположение (координаты X, У, Н) машины 1 в линейной системе координат Км+Пк+м (фиг. 4). При этом приемник 7 через модем 8 по GSM-связи или радиоканалу принимает дифференциальные поправки, обеспечивая высокую точность определения текущих пространственных координат XA4, УA4, HA4 и XA5, УА5, HA5 точек А4 и А5 относительно базовой станции (репера) спутниковыми антеннами 4 и 5. Указанные пространственные координаты в точках А4 и А5 машины 1 определяются одновременно и поступают через спутниковый приемник 7 в бортовой компьютер 9. Высотные отметки HA4 по антенне 4 и высотные отметки HA5, по антенне 5 определяются в системе высот проекта на ремонт или в условной системе высот.
В процессе уплотнения балласта коэффициент Еу уплотнения, скорость движения машины для уплотнения балласта определяют с использованием данных о пространственных координатах двух точек, расположенных в зоне, передней (по ходу движения) части машины 1, находящейся на неуплотненном участке пути, и в ее задней части, находящейся в уплотненной зоне, в точках А4 и А5, соответственно (фиг. 1). Получение указанных данных обеспечивают спутниковые антенны 4, 5, с помощью которых синхронно получают пространственные координаты XA4, УA4, HA4 передней части машины (точка А4) и координаты XA5, УА5, HA5 задней части машины (точка А5). По известным значениям L4, L5 от спутниковых антенн 4 и 5 до головки рельса высотные отметки HA4 и HA5 указанных спутниковых антенн редуцируют на головку рельса по отвесной линии.
Высотные отметки Hгрп и Hгрз головки рельса для точек, находящихся в передней, неуплотненной части ремонтируемого пути, и в задней части машины 1, находящейся в зоне после уплотнения, определяются по формулам:


Величина просадки P в процессе уплотнения рассчитывается по формуле:

где Hгпр(i) - текущая высотная отметка проекции высотной отметки спутниковой антенны 4 на головку рельса в точке A4(i);
Hгрп(i-1) - текущая высотная отметка проекции высотной отметки спутниковой антенны 4 на головку рельса в точке А5(i-1);
Hгрз(i-1) - текущая высотная отметка проекции высотной отметки спутниковой антенны 5 на головку рельса в точке А5(i-1)
Коэффициент Еу уплотнения рассчитывается по формуле:

где d - толщина слоя балласта, P - величина просадки, n - количество измеренных i-точек на участке пути определения коэффициента Еу уплотнения.
Скорость движения машины V в любой момент времени определяется в соответствии с выражением:

где Xa4i, Уa4i - координаты спутниковой антенны 4 в i-ых точках, Xa4(i-1), Уа4(i-1) - координаты спутниковой антенны 4 в (i-1) точках, ti - текущее время измерения координат спутниковой антенной 4 в i-ой точке, t(i-1) - текущее время измерения координат спутниковой антенной 5 в (i-1) точке.
Техническое решение реализуется следующим образом.
В компьютере 9 указанные высотные отметки НА4 и НА5 по формулам (1) и (2), пересчитываются на уровень головки рельса с получением соответствующих значений высотных отметок головки рельса, Hгрп и Hгрз для каждой i-ой точки на участке измерений, по которым далее по формуле (3) рассчитывается величина Р просадки. По полученным данным о величинах просадки Р на данном участке ремонтируемого пути, включающем n i-ых точек, для каждой из этих точек бортовой компьютер 9 в соответствии с выражением (4) выполняет расчет коэффициента Еу уплотнения, значение которого контролируется компьютером 9 и при отклонении от заданного интервала, корректируется изменением скорости V движения машины 1. Скорость V машины вычисляется в соответствии с выражением (5). При этом в бортовом компьютере 9 формируются и визуализируются графики, отображающие текущие данные, характеризующие процесс и качество уплотнения. Все получаемые данные отображаются в реальном масштабе времени на дисплее компьютера 9 в виде графиков (см. фиг. 4). При отклонении от заданного диапазона коэффициента Еу уплотнения, соответствующим образом изменяют скорость V движения машины 1, обратно пропорционально изменению коэффициента Еу уплотнения. Изменение осуществляется на величину, соответствующую функциональной, эмпирической зависимости, обеспечивающей заданный диапазон для Еу, независимо от изменений внешних условий. Контроль полученного качества уплотнения балласта выполняют при контрольном проходе машины 1, движение которой равномерно на уплотненном участке, при этом контрольное значение коэффициента Еу уплотнения не должно превышать заданного предела.
По отношению к способу - прототипу, с определением коэффициента уплотнения на основе измерений амплитуды вибраций, определяемой вибродатчиком, заявленное техническое решение обеспечивает повышение точности измерений и достоверности данных, так как вибродатчики регистрируют только качество работы машины. Однако при различных внешних условиях (например, болотистая местность) регистрируемая амплитуда вибраций машины в процессе уплотнения может быть значительной, при этом необходимая степень уплотнения определяется неоднозначно, включая коэффициент уплотнения.
Основным преимуществом предлагаемого решения является непосредственное определение текущего значения коэффициента Еу уплотнения балласта в любой точке ремонтируемого пути по фактическим значениям Р просадки и толщины рыхлого слоя балласта, что в отличие от эмпирических, полученных опытным путем или других косвенных характеристик, обеспечивает повышение достоверности оценки качества уплотнения балласта и при наличии изменений внешних факторов, влияющих на уплотнение и на факторы процесса уплотнения.
В целом, техническое решение обеспечивает оперативное и достоверное определение качества уплотнения балластной призмы, позволяет своевременно и эффективно корректировать скорость движения машины по выправляемому пути и, таким образом, обеспечивает повышение производительности и эффективности работ по ремонту и планово-предупредительной выправке железнодорожного пути.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления процессом уплотнения балластного слоя рельсового пути | 2021 |
|
RU2765725C1 |
| Способ определения пространственных координат и геометрических параметров рельсового пути и устройство для его осуществления | 2016 |
|
RU2628541C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ КАЧЕСТВА УПЛОТНЕНИЯ БАЛЛАСТНОГО СЛОЯ РЕЛЬСОВОГО ПУТИ | 2010 |
|
RU2464370C2 |
| УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2013 |
|
RU2551637C2 |
| СПОСОБ ПРОВЕДЕНИЯ РЕМОНТОВ И РЕКОНСТРУКЦИИ ЖЕЛЕЗНОДОРОЖНОЙ ИНФРАСТРУКТУРЫ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОЙ МОДЕЛИ ПУТИ | 2011 |
|
RU2465385C1 |
| Система контроля готовности фронта к проведению машинизированной выправки железнодорожного пути | 2022 |
|
RU2793867C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2011 |
|
RU2454498C1 |
| Способ выправки железнодорожного пути и устройство для его осуществления | 2023 |
|
RU2824765C1 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА ДЛЯ ВЫПРАВКИ И КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2443826C2 |
| Информационно-управляющая система перемещения рельсов, шпал и балласта для обеспечения работоспособности железнодорожного пути по заданным критериям | 2020 |
|
RU2738026C1 |
Изобретение относится к железнодорожному транспорту, а именно к технологии ремонта железнодорожного пути, а именно для контроля качества уплотнения балластного слоя. Способ заключается в том, что осуществляют синхронное измерение пространственных координат точек, одна из которых расположена на ремонтируемом рельсовом пути в зоне уплотнения, а другая - в уплотненной зоне, по которым определяют текущие значения величины просадки и достигаемый коэффициент уплотнения. Скорость движения машины определяют по указанным пространственным координатам и регулируют в зависимости от фактического значения коэффициента уплотнения в каждый текущий момент. Указанные измерения осуществляют с помощью двух спутниковых антенн (4,5) приемника, одна из которых установлена в передней по ходу движения части машины (1), а другая - в ее задней части, их выходы соединены с соответствующими входами приемника спутниковой системы позиционирования (7), первый и второй входы - выходы которого связаны бортовым компьютером (9) и модемом (8), принимающим сигналы базовой спутниковой станции. В результате повышается достоверность определения качества уплотнения балластной призмы железнодорожного пути при проведении ремонтных работ, повышается оперативность и производительность данных работ. 2 н.п. ф-лы, 4 ил.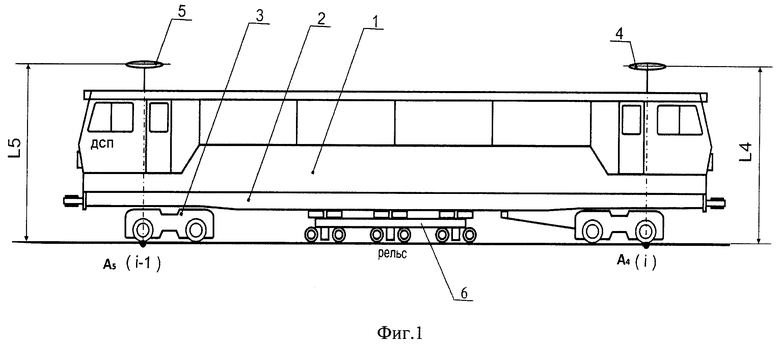
1. Способ автоматического контроля качества уплотнения балластного слоя рельсового пути, осуществляемого путем вибрационного воздействия на уплотняемый балласт и регистрации величины его просадки, отличающийся тем, что при уплотнении балласта осуществляют синхронное измерение пространственных координат текущих значений величины просадки в зоне уплотнения ремонтируемого рельсового пути и в его уплотненной зоне, по получаемым пространственным координатам определяют фактическое значение коэффициента уплотнения балласта, а скорость движения машины, осуществляющей вибрационное воздействие на уплотняемый балласт, регулируют в зависимости от фактического значения коэффициента уплотнения в каждый текущий момент.
2. Система автоматического контроля качества уплотнения балластного слоя для осуществления способа по п. 1, содержащая машину для стабилизации пути, содержащую раму, опирающуюся на ходовые тележки, виброблок, установленный на несущей раме, установленные на виброблоке вибродатчики, подключенные к бортовому компьютеру, контрольно-измерительную систему, отличающаяся тем, что она снабжена двумя спутниковыми антеннами, приемником спутниковой системы позиционирования и модемом, причем антенны установлены, соответственно, в передней и задней по ходу движения машины части указанной рамы, их выходы соединены с соответствующими входами приемника спутниковой системы позиционирования, входы - выходы которого связаны соответственно с указанным бортовым компьютером и модемом, принимающим сигналы базовой спутниковой станции.
| СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ КАЧЕСТВА УПЛОТНЕНИЯ БАЛЛАСТНОГО СЛОЯ РЕЛЬСОВОГО ПУТИ | 2010 |
|
RU2464370C2 |
| Прибор для перемешивания карамельной массы вовремя ее окрашивания | 1933 |
|
SU35544A1 |
| US 4430946 A, 14.02.1984 | |||
| US 5257579 A, 02.11.1993. | |||

