Изобретение относится к области измерения угловой скорости, а конкретнее к приборам, выполняющим измерения с помощью электрических или магнитных средств. Заявленный измеритель может применяться для измерения скорости движения вагона электропоезда метро (подвижного состава) по двум независимым каналам методом преобразования частоты амплитудной модуляции входного сигнала при работе с параметрическим индуктивным датчиком вращения шестерни редуктора колёсной пары либо частоты следования входных импульсов при работе с импульсным датчиком вращения колеса колёсной пары. Кроме того, заявленный измеритель может применяться для выдачи измеренного значения скорости в виде цифрового кода по шине CAN на внешние средства отображения и регистрации, а также в виде частотного синусоидального сигнала в аппаратуру автоматического регулирования скорости поезда. Также заявленный измеритель может применяться для измерения линейного ускорения движения вагона электропоезда метро (подвижного состава) по двум независимым каналам методом вычисления по результатам измерения скорости.
Заявленное техническое решение не имеет аналогов.
Задача, которую поставил перед собой разработчик нового измерителя параметров движения и способа его работы, состояла в создании надежного и точного измерителя параметров движения составного транспорта. Технический результат заключается в обеспечении возможности измерения параметров движения составного транспорта, таких как: скорость движения, ускорение движения, направление движения, пройденный путь, с помощью бесконтактного датчика, в котором отсутствуют трущиеся детали. Данный технический результат достигается за счет всей совокупности существенных признаков.
Сущность изобретения состоит в том, что измеритель параметров движения составного транспорта состоит из генератора несущей частоты, выполненного с возможностью формирования прямоугольных импульсов положительной полярности, датчика вращения шестерни, состоящего из по меньшей мере двух катушек индуктивности и установленного в кожухе редуктора колесной пары таким образом, чтобы ось катушек индуктивности располагалась перпендикулярно линии зуба шестерни колесной пары составного транспорта, синхронных детекторов первого и второго каналов, выполненных с возможностью детектирования амплитудно-модулированных сигналов и выделения сигналов модулирующей частоты, соответствующих частоте прохождения зубьев шестерни колесной пары, а также содержащих каждый нормально замкнутый и нормально разомкнутый ключи, фильтров нижних частот первого и второго каналов, усилителей переменного тока первого и второго каналов, компараторов первого и второго каналов, выполненных с возможностью формирования прямоугольных импульсов, частота следования которых равна частоте модулирующего сигнала, контроллера, выполненного с возможностью определения скорости, ускорения, направления движения и пройденного пути на основе прямоугольных импульсов, полученных от компараторов, задатчика параметров и индикатора, причём генератор несущей частоты электрической цепью соединен со входами управления синхронных детекторов первого и второго каналов и через трансформатор с катушками индуктивности датчика вращения шестерни, причём одна катушка индуктивности электрической цепью соединена с резистором первого канала и через трансформатор первого канала с прямым и инверсным входами синхронного детектора первого канала, а другая катушка индуктивности электрической цепью соединена с резистором второго канала и через трансформатор второго канала с прямым и инверсным входами синхронного детектора второго канала, синхронные детекторы первого и второго каналов электрической цепью соединены с трансформаторами первого и второго каналов соответственно, а также через фильтры нижних частот первого и второго каналов электрической цепью соединены со входами усилителей переменного тока первого и второго каналов соответственно, усилители переменного тока первого и второго каналов электрической цепью соединены со входами компараторов первого и второго каналов соответственно, компараторы электрической цепью соединены с контроллером, который электрической цепью соединён с задатчиком параметров и индикатором. Вместе с тем, задатчик параметров выполнен в виде клавиатуры либо набора переключателей. Кроме того, индикатор выполнен в виде жидкокристаллического дисплея. А катушки индуктивности заключены в стальной металлический корпус и залиты компаундом. Вместе с тем контроллер представляет собой микропроцессор. А способ работы измерителя параметров движения составного транспорта заключается в том, что датчик вращения шестерни устанавливают в кожухе редуктора колесной пары так, чтобы ось его катушек индуктивности была расположена перпендикулярно линии зуба шестерни колёсной пары, для прохождения зуба шестерни в зоне чувствительности датчика вращения шестерни и поочередного изменения электрических параметров катушек индуктивности, которое преобразуют при помощи первого и второго каналов измерителя в прямоугольные импульсы, частота следования которых пропорциональна частоте вращения колесной пары, причем по первому и второму каналам формируют две последовательности импульсов, сдвинутых относительно друг друга по фазе, при этом при помощи генератора несущей частоты формируют прямоугольные импульсы, поступающие через трансформатор на вход делителей напряжения, для изменения уровня несущей частоты на резисторах за счёт изменения величины индуктивного сопротивления катушек индуктивности, данные амплитудно-модулированные сигналы поступающие через трансформаторы первого и второго каналов на входы синхронных детекторов соответственно первого и второго каналов, затем на выходах синхронных детекторов выделяют сигналы модулирующей частоты, соответствующие частоте прохождения зубьев шестерни и остатки сигналов несущей частоты, данные сигналы поступают на входы усилителей переменного тока через фильтры нижних частот, с помощью которых производят подавление остатков несущей частоты, далее сигналы модулирующей частоты обоих катушек индуктивности передают для усиления на усилители переменного тока, затем их передают на входы компараторов, где предварительно выбрав порог срабатывания компараторов регулируют чувствительность первого и второго каналов, затем выходные сигналы компараторов первого и второго каналов в виде прямоугольных импульсов положительной полярности, сдвинутых относительно друг друга по фазе передают на вход контролера, где осуществляют определение скорости движения и/или ускорения движения и/или направления движения и/или пройденного пути, затем отображают их на индикаторе. Вместе с тем, измерение скорости движения производят в соответствии со следующей функцией преобразования:
VИЗМ = int (VД ×10)/10,
где
VИЗМ – скорость движения;
int − функция выделения целой части числа по правилам округления;
VД −действительное значение скорости, км/ч, вычисляется по формуле
VД = (3,6×10-3× π×fвх×D)/Z ,
где
π = 3,1415926, константа;
fвх − частота амплитудной модуляции входного сигнала от датчика вращения шестерни 2, которая равна частоте прохождения зубьев шестерни редуктора колёсной пары в рабочей зоне датчика вращения шестерни 2, Гц;
D − диаметр колеса колёсной пары, мм;
Z – количество зубьев шестерни редуктора колёсной пары.
В то же время, измерение ускорения движения осуществляют в соответствии со следующей функцией преобразования
аизм = int (ад ×100)/100,
где
аизм – ускорения движения;
ад − действительное значение ускорения, м/с2, вычисляемое по формуле
ад = (10-3× π × D × ΔFвх/Δt)/ Z,
где
ΔfВХ/Δt − скорость изменения частоты прямоугольных импульсов, поступающих на вход контроллера 11, Гц/с.
А диаметр колеса колёсной пары и количество зубьев шестерни редуктора колёсной пары вводят в контроллер с помощью задатчика параметров.
Изобретение поясняется графически, где:
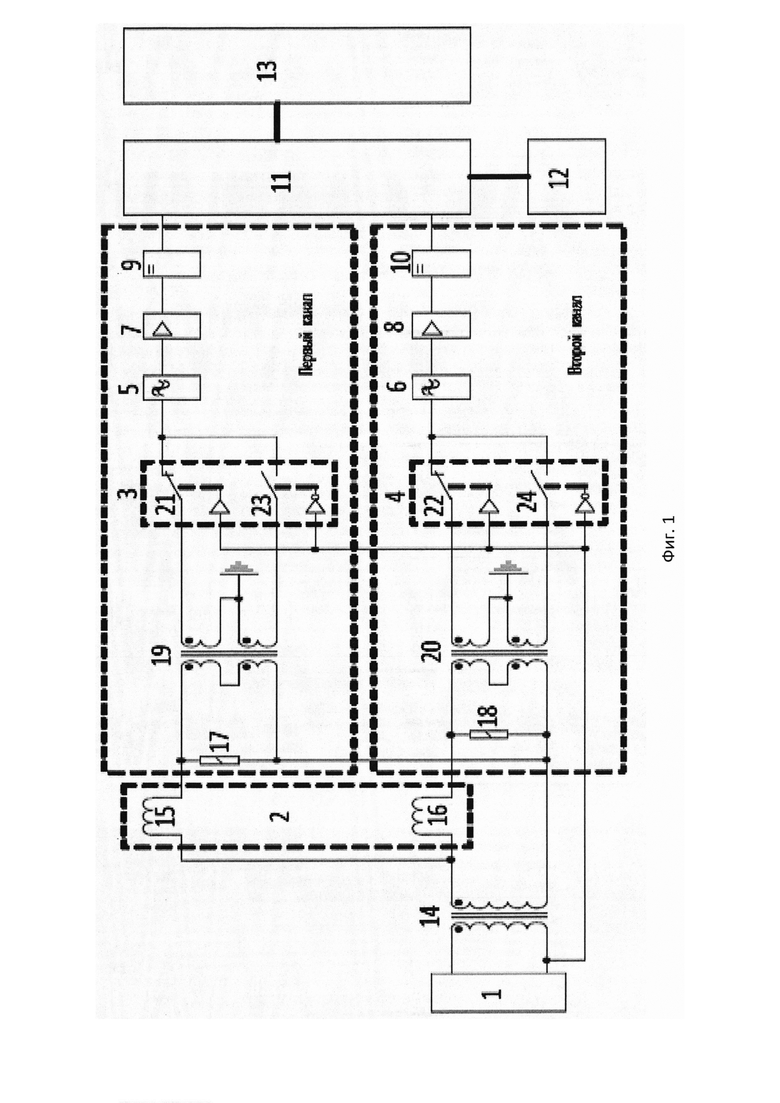
на фиг. 1 – структурная схема измерителя параметров движения.
Измеритель параметров движения состоит из генератора несущей частоты 1, датчика вращения шестерни 2, синхронных детекторов первого 3 и второго 4 каналов, фильтров нижних частот первого 5 и второго 6 каналов, усилителей переменного тока первого 7 и второго 8 каналов, компараторов первого 9 и второго 10 каналов, контроллера 11, задатчика параметров 12 и индикатора 13. Генератор несущей частоты 1 представляет собой генератор прямоугольных импульсов положительной полярности. Генератор несущей частоты 1 предназначен для формирования прямоугольных импульсов частота следования, которых значительно больше частоты вращения колесной пары, например, 40000 Гц. Генератор несущей частоты 1 соединен с входами управления синхронных детекторов первого 3 и второго 4 каналов и через трансформатор 14 с катушками индуктивности 15 и 16 датчика вращения шестерни 2. Датчик вращения шестерни 2 представляет собой бесконтактный датчик, содержащий две катушки индуктивности 15, 16 предназначенные регистрации прохождения зуба шестерни колесной пары. Датчик вращения шестерни 2 установлен в кожухе редуктора колесной пары. Датчик вращения шестерни 2 установлен таким образом, чтобы ось катушек индуктивности 15, 16 была перпендикулярна линии зуба шестерни (на фиг. не показано). Катушки индуктивности 15, 16 заключены в стальной металлический корпус и залиты компаундом. Катушка индуктивности 15 соединена с резистором 17 первого канала и через трансформатор 19 с прямым и инверсным входами синхронного детектора первого 3 канала. Катушка индуктивности 16 соединена с резистором 18 второго канала и через трансформатор 20 с прямым и инверсным входами синхронного детектора второго 4 канала. Синхронные детекторы первого 3 и второго 4 каналов предназначены для детектирования амплитудно-модулированных сигналов, частота следования которых пропорциональна частоте вращения колесной пары. Каждый синхронный детектор первого 3 и второго 4 каналов содержит нормально замкнутые ключи 21 и 22 и нормально разомкнутые ключи 23 и 24 соответственно. Ключи 21 и 22 управляется положительными импульсами генератора 1, а ключи 23 и 24 – инверсными. На выходах синхронных детекторов первого 3 и второго 4 каналов выделяются сигналы модулирующей частоты, соответствующие частоте прохождения зубьев шестерни, и остатки сигналов несущей частоты. Синхронные детекторы первого 3 и второго 4 каналов соединены с трансформаторами 19, 20 первого и второго каналов соответственно. Также синхронные детекторы первого 3 и второго 4 каналов через фильтры нижних частот первого 5 и второго 6 каналов соединены с входами усилителей переменного тока первого 7 и второго 8 каналов. Фильтры нижних частот первого 5 и второго 6 каналов предназначены для подавления остатков несущей частоты. Фильтры нижних частот первого 5 и второго 6 каналов соединены соответственно с синхронными детекторами первого 3 и второго 4 каналов электрической цепью. Фильтры нижних частот первого 5 и второго 6 каналов также соединены соответственно с усилителями переменного тока первого 7 и второго 8 каналов электрической цепью. Усилители переменного тока первого 7 и второго 8 каналов предназначены для усиления сигналов модулирующей частоты обоих катушек индуктивности 15 и 16. Усилители переменного тока первого 7 и второго 8 каналов соединены со входами компараторов первого 9 и второго 10 каналов электрической цепью. Компараторы первого 9 и второго 10 каналов предназначены для формирования прямоугольных импульсов, частота следования которых равна частоте модулирующего сигнала. Компараторы первого 9 и второго 10 каналов соединены с контроллером 11 электрической цепью. Контроллер 11 предназначен для определения следующих параметров движения поезда: скорости движения; ускорения движения; направления движения с возможностью коррекции из-за возможности установки датчика ДВШ в различных положениях, влияющих на определение направления; пройденного пути, используя параметры (частота и фаза) прямоугольных импульсов, полученных от компараторов первого 9 и второго 10 каналов. Контроллер 11 представляет собой микропроцессор. Контроллер 11 соединён с задатчиком параметров 12 и индикатором 13 электрической цепью. Задатчик параметров 12 представляет собой устройство ввода данных, необходимых для правильной работы контроллера 11, например, клавиатуру или набор переключателей. Задатчик параметров 12 предназначен для ввода в контроллер 11 значений параметров D (диаметр колеса колёсной пары) и Z (количество зубьев шестерни редуктора колёсной пары), необходимых при вычислении параметров движения. Индикатор 13 предназначен для отображения параметров движения, поступивших от контроллера 11. Индикатор 13 представляет собой, например, жидкокристаллический дисплей, на котором отображаются значения параметров движения.
Способ работы измерителя параметров движения заключается в следующем. Датчик вращения шестерни 2 устанавливают в кожухе редуктора колесной пары таким образом, чтобы ось катушек индуктивности 15 и 16 была перпендикулярна линии зуба шестерни. При прохождении зуба шестерни в зоне чувствительности датчик вращения шестерни 2 происходит поочередное изменение электрических параметров катушек индуктивности 15 и 16. Данное изменение преобразуют при помощи первого и второго каналов устройства в прямоугольные импульсы. Причём частота следования прямоугольных импульсов пропорциональна частоте вращения колесной пары. Причем по первому и второму каналам формируют две последовательности импульсов, сдвинутых относительно друг друга по фазе. Это дает возможность определять направление движения поезда. Генератор несущей частоты 1 формирует прямоугольные импульсы, которые через трансформатор 14 поступают на вход делителей напряжения, состоящих из катушек индуктивности 15 и 16 датчика вращения шестерни 2 и резисторов 17 первого и 18 второго каналов соответственно. При изменении величины индуктивного сопротивления катушек индуктивности 15 и 16 происходит изменение уровня несущей частоты на резисторах 17 и 18. Эти амплитудно-модулированные сигналы поступают через трансформаторы 19 и 20 на входы синхронных детекторов первого 3 и второго 4 каналов. Затем на выходах синхронных детекторов 3 и 4 выделяют сигналы модулирующей частоты, соответствующие частоте прохождения зубьев шестерни, и остатки сигналов несущей частоты. Эти сигналы поступают на входы усилителей переменного тока 7 и 8 через фильтры нижних частот 5 и 6, с помощью которых производят подавление остатков несущей частоты. Сигналы модулирующей частоты обоих катушек индуктивности 15 и 16 после усиления передают на входы компараторов 9 и 10. За счёт выбора порогов срабатывания компараторов 9 и 10 обеспечивают высокую чувствительность первого и второго каналов. Выходные сигналы компараторов 9 перового и 10 второго каналов в виде прямоугольных импульсов положительной полярности, сдвинутых относительно друг друга по фазе, передают на вход контролера 11. При помощи контроллера 11 осуществляют определение следующих параметров движения поезда: скорости движения; ускорения движения; направления движения с возможностью коррекции из-за возможности установки датчика вращения шестерни 2 в различных положениях, влияющих на определение направления; пройденного пути. Причём измерение скорости движения поезда VИЗМ, км/ч, производят в соответствии со следующей функцией преобразования
(1) VИЗМ = int (VД ×10)/10,
где
int − функция выделения целой части числа по правилам округления;
VД −действительное значение скорости, км/ч, вычисляется по формуле
(2) VД = (3,6×10-3× π×fвх×D)/Z ,
где
π = 3,1415926, константа;
fвх − частота амплитудной модуляции входного сигнала от датчика вращения шестерни 2, которая равна частоте прохождения зубьев шестерни редуктора колёсной пары в рабочей зоне датчика вращения шестерни 2, Гц;
D − диаметр колеса колёсной пары, мм;
Z – количество зубьев шестерни редуктора колёсной пары.
Параметры D и Z вводятся в контроллер с помощью задатчика параметров 12.
А измерение ускорения движения поезда аизм, м/с2, осуществляют в соответствии со следующей функцией преобразования
(3) аизм = int (ад ×100)/100,
где
аД − действительное значение ускорения, м/с2, вычисляемое по формуле
(4) аД = (10-3× π × D × ΔFвх/Δt)/ Z,
где
ΔfВХ/Δt − скорость изменения частоты прямоугольных импульсов, поступающих на вход контроллера 11, Гц/с. Далее определяемые с помощью контроллера 11 параметры движения поезда отображают на индикаторе 13.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МОЛОТИЛЬНОГО БАРАБАНА ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 2007 |
|
RU2382543C2 |
| СПОСОБ РЕГИСТРАЦИИ ПРОХОЖДЕНИЯ КОЛЕСНЫХ ПАР ПОДВИЖНОГО СОСТАВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2564553C2 |
| Вихретоковое измерительное устройство | 1989 |
|
SU1652896A1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| ИНДУКЦИОННЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ | 2014 |
|
RU2570232C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ КОМПЛЕКСНОГО СОПРОТИВЛЕНИЯ МОСТОВОЙ СХЕМЫ | 2014 |
|
RU2589273C2 |
| Индукционный измеритель положения вращающегося вала | 2019 |
|
RU2704672C1 |
| СПОСОБ ВИБРАЦИОННОГО ИЗМЕРЕНИЯ МАССОВОГО РАСХОДА ПОТОКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2354939C1 |
| ПУТЕВОЙ ДАТЧИК | 1999 |
|
RU2169677C2 |
| Способ высокоточных электромагнитных зондирований и устройство для его осуществления | 2016 |
|
RU2629705C1 |
Изобретение относится к измерительной технике. Способ заключается в том, что датчик вращения шестерни устанавливают в кожухе редуктора колесной пары так, чтобы ось его катушек индуктивности была расположена перпендикулярно линии зуба шестерни колёсной пары, для прохождения зуба шестерни в зоне чувствительности датчика вращения шестерни и поочередного изменения электрических параметров катушек индуктивности, которое преобразуют при помощи первого и второго каналов измерителя в прямоугольные импульсы, частота следования которых пропорциональна частоте вращения колесной пары. Причем по первому и второму каналам формируют две последовательности импульсов, сдвинутых относительно друг друга по фазе, при этом при помощи генератора несущей частоты формируют прямоугольные импульсы, поступающие через трансформатор на вход делителей напряжения, для изменения уровня несущей частоты на резисторах за счёт изменения величины индуктивного сопротивления катушек индуктивности, данные амплитудно-модулированные сигналы, поступающие через трансформаторы первого и второго каналов на входы синхронных детекторов соответственно первого и второго каналов, затем на выходах синхронных детекторов выделяют сигналы модулирующей частоты, соответствующие частоте прохождения зубьев шестерни, и остатки сигналов несущей частоты, данные сигналы поступают на входы усилителей переменного тока через фильтры нижних частот, с помощью которых производят подавление остатков несущей частоты, далее сигналы модулирующей частоты обеих катушек индуктивности передают для усиления на усилители переменного тока, затем их передают на входы компараторов, где, предварительно выбрав порог срабатывания компараторов, регулируют чувствительность первого и второго каналов, затем выходные сигналы компараторов первого и второго каналов в виде прямоугольных импульсов положительной полярности, сдвинутых относительно друг друга по фазе, передают на вход контролера. 2 н. и 7 з.п. ф-лы, 1 ил.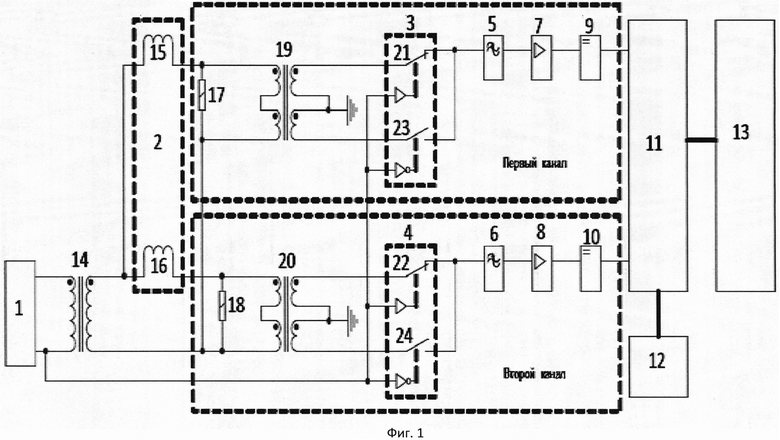
1. Измеритель параметров движения составного транспорта, состоящий из генератора несущей частоты, выполненного с возможностью формирования прямоугольных импульсов положительной полярности, датчика вращения шестерни, состоящего из по меньшей мере двух катушек индуктивности и установленного в кожухе редуктора колесной пары таким образом, чтобы ось катушек индуктивности располагалась перпендикулярно линии зуба шестерни колесной пары составного транспорта, синхронных детекторов первого и второго каналов, выполненных с возможностью детектирования амплитудно-модулированных сигналов и выделения сигналов модулирующей частоты, соответствующих частоте прохождения зубьев шестерни колесной пары, а также содержащих каждый нормально замкнутый и нормально разомкнутый ключи, фильтров нижних частот первого и второго каналов, усилителей переменного тока первого и второго каналов, компараторов первого и второго каналов, выполненных с возможностью формирования прямоугольных импульсов, частота следования которых равна частоте модулирующего сигнала, контроллера, выполненного с возможностью определения скорости, ускорения, направления движения и пройденного пути на основе прямоугольных импульсов, полученных от компараторов, задатчика параметров и индикатора, причём генератор несущей частоты электрической цепью соединен с входами управления синхронных детекторов первого и второго каналов и через трансформатор с катушками индуктивности датчика вращения шестерни, причём одна катушка индуктивности электрической цепью соединена с резистором первого канала и через трансформатор первого канала с прямым и инверсным входами синхронного детектора первого канала, а другая катушка индуктивности электрической цепью соединена с резистором второго канала и через трансформатор второго канала с прямым и инверсным входами синхронного детектора второго канала, синхронные детекторы первого и второго каналов электрической цепью соединены с трансформаторами первого и второго каналов соответственно, а также через фильтры нижних частот первого и второго каналов электрической цепью соединены с входами усилителей переменного тока первого и второго каналов соответственно, усилители переменного тока первого и второго каналов электрической цепью соединены с входами компараторов первого и второго каналов соответственно, компараторы электрической цепью соединены с контроллером, который электрической цепью соединён с задатчиком параметров и индикатором.
2. Измеритель по п. 1, отличающийся тем, что задатчик параметров выполнен в виде клавиатуры либо набора переключателей.
3. Измеритель по п. 1, отличающийся тем, что индикатор выполнен в виде жидкокристаллического дисплея.
4. Измеритель по п. 1, отличающийся тем, что катушки индуктивности заключены в стальной металлический корпус и залиты компаундом.
5. Измеритель по п. 1, отличающийся тем, что контроллер представляет собой микропроцессор.
6. Способ работы измерителя параметров движения составного транспорта, заключающийся в том, что датчик вращения шестерни устанавливают в кожухе редуктора колесной пары так, чтобы ось его катушек индуктивности была расположена перпендикулярно линии зуба шестерни колёсной пары, для прохождения зуба шестерни в зоне чувствительности датчика вращения шестерни и поочередного изменения электрических параметров катушек индуктивности, которое преобразуют при помощи первого и второго каналов измерителя в прямоугольные импульсы, частота следования которых пропорциональна частоте вращения колесной пары, причем по первому и второму каналам формируют две последовательности импульсов, сдвинутых относительно друг друга по фазе, при этом при помощи генератора несущей частоты формируют прямоугольные импульсы, поступающие через трансформатор на вход делителей напряжения, для изменения уровня несущей частоты на резисторах за счёт изменения величины индуктивного сопротивления катушек индуктивности, данные амплитудно-модулированные сигналы, поступающие через трансформаторы первого и второго каналов на входы синхронных детекторов соответственно первого и второго каналов, затем на выходах синхронных детекторов выделяют сигналы модулирующей частоты, соответствующие частоте прохождения зубьев шестерни, и остатки сигналов несущей частоты, данные сигналы поступают на входы усилителей переменного тока через фильтры нижних частот, с помощью которых производят подавление остатков несущей частоты, далее сигналы модулирующей частоты обеих катушек индуктивности передают для усиления на усилители переменного тока, затем их передают на входы компараторов, где, предварительно выбрав порог срабатывания компараторов, регулируют чувствительность первого и второго каналов, затем выходные сигналы компараторов первого и второго каналов в виде прямоугольных импульсов положительной полярности, сдвинутых относительно друг друга по фазе, передают на вход контролера, где осуществляют определение скорости движения, и/или ускорения движения, и/или направления движения и/или пройденного пути, затем отображают их на индикаторе.
7. Способ работы измерителя параметров движения составного транспорта по п. 6, отличающийся тем, что измерение скорости движения производят в соответствии со следующей функцией преобразования:
Vизм = int(Vд × 10)/10,
где
Vизм – скорость движения;
int − функция выделения целой части числа по правилам округления;
Vд − действительное значение скорости, км/ч, вычисляется по формуле
Vд = (3,6 × 10-3 × π × fвх × D)/Z,
где
π = 3,1415926, константа;
fвх − частота амплитудной модуляции входного сигнала от датчика вращения шестерни, которая равна частоте прохождения зубьев шестерни редуктора колёсной пары в рабочей зоне датчика вращения шестерни, Гц;
D − диаметр колеса колёсной пары, мм;
Z – количество зубьев шестерни редуктора колёсной пары.
8. Способ работы измерителя параметров движения составного транспорта по п. 6, отличающийся тем, что измерение ускорения движения осуществляют в соответствии со следующей функцией преобразования:
аизм = int (ад × 100)/100,
где
аизм – ускорения движения;
ад − действительное значение ускорения, м/с2, вычисляемое по формуле
ад = (10-3 × π × D × ∆fвх/∆t)/Z,
где
∆fвх/∆t − скорость изменения частоты прямоугольных импульсов, поступающих на вход контроллера, Гц/с.
9. Способ работы измерителя параметров движения составного транспорта по п. 7 или 8, отличающийся тем, что диаметр колеса колёсной пары и количество зубьев шестерни редуктора колёсной пары вводят в контроллер с помощью задатчика параметров.
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ПАРАМЕТРОВ ДВИЖЕНИЯ ПОЕЗДА | 1992 |
|
RU2041100C1 |
| Устройство для контроля скорости движения поезда | 1986 |
|
SU1375498A1 |
| Устройство для определения параметров движения поезда | 1989 |
|
SU1768430A1 |
| US 5825177 A, 20.10.1998 | |||
| US 3823373 A, 09.07.1974. | |||

