1
Изобретение относится к машинестроению, а именно к захватам манипуляторов с автоматическим или дистанционным управлением.
Известен захват манипулятора, предназначенный для захвата и удержания объектов, в котором содержатся шарнирно установленные на корпусе приводные губки и система упраления LI .- Недостатком указанного захвата является ненадежная работа вследствие отсутствия на нем механизма защиты от ударо.р при случайных столкновениях с препятствием.
Наиболее близким к предлагаемому является захват манипулятора, в котором содержатся шарнирно установленные на корпусе приводные губки, :каждая из которых снабжена устройСтвом Зсициты и система управления 2 .
Недостаток указанного захвата заключается в недостаточной надежности и сложности конструкции механизма защиты.
Цель изобретения - повышение на.дежности и упрощение конструкции.
Указанная цель достигается тем, что устройство защиты выполнено в виде двуплечего рычага, одно из плеч которого кинематически связано с датчиком системы управления, а второе - с упругим элементом, закрепленным с наружной стороны губки, а также тем, что упругий элемент в средней части снабжен выступом, ширина которого больше ширины губки, и кинематически связан с рычагом с возможностью их разъединения.
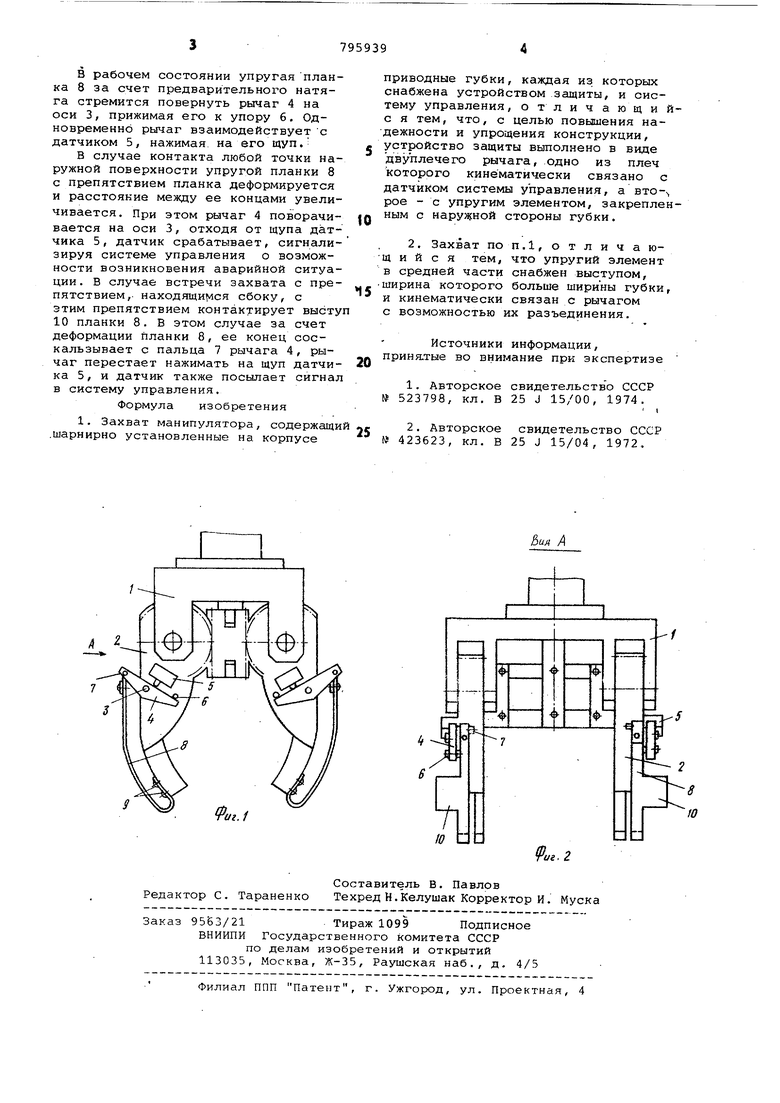
На фиг,1 изображен захват манипулятора, общий вид; на фиг.2 вид по стрелке А на фиг.1
Захват содержит корпус 1, приводные поворотные губки 2. На каждой из губок 2 закреплена ось 3, на котороп помещен двуплечий рычаг 4. Рычаг 4 контактирует с датчиком 5 системы управления и упором 6. На рычаге имеется палец 7, с которым шарнирно связан конец упругой планки
8, закрепленной вторым концом к
губке 2 с помощью винтов 9. Упругая планка 8 имеет выступ 10, ширина которого больше ширины губки.
Захват работает следующим образом.
В рабочем состоянии упругаяпланка 8 за счет предварительного натяга стремится повернуть рычаг 4 на оси 3, прижимая его к упору 6. Одновременно рычаг взаимодействует с датчиком 5, нажимая на его щуп.
В случае контакта любой точки наружной поверхности упругой планки 8 с препятствием планка деформируется и расстояние между ее концами увеличивается. При этом рычаг 4 поворачивается на оси 3, отходя от щупа датчика 5, датчик срабатывает, сигнализируя системе управления о возможности возникновения аварийной ситуации. В случае встречи захвата с препятствием, находящимся сбоку, с этим препятствием контактирует высту 10 планки 8. В этом случае за счет деформации планки 8, ее конец соскальзывает с пальца 7 рычага 4, рычаг перестает нажимать на щуп датчика 5 , и датчик также посылает сигнал в систему управления.
Формула изобретения
1. Захват манипулятора, содержащи .шарнирно установленные на корпусе
приводные губки, каждая из которых снабжена устройством защиты, и систему управления, отличающийс я тем, что, с целью повышения надежности и упрощения конструкции, устройство защиты выполнено в виде двуплечего рычага, одно из плеч которого кинематически связано с датчиком системы управления, а вто-ч, рое - с упругим элементом, закрепленным с наружной стороны губки.
2. Захват попЛ, о т л и ч а ющ и и с я тем, что упругий элемент в средней части снабжен выступом, ширина которого больше ширины губки, и кинематически связан с рычагом с возможностью их разъединения.
Источники информации, приня.тые во внимание при экспертизе
1.Авторское свидетельство СССР
№ 523798, кл. В 25 J 15/00, 1974.
1
2.Авторское свидетельство СССР № 423623, кл. В 25 J 15/04, 1972,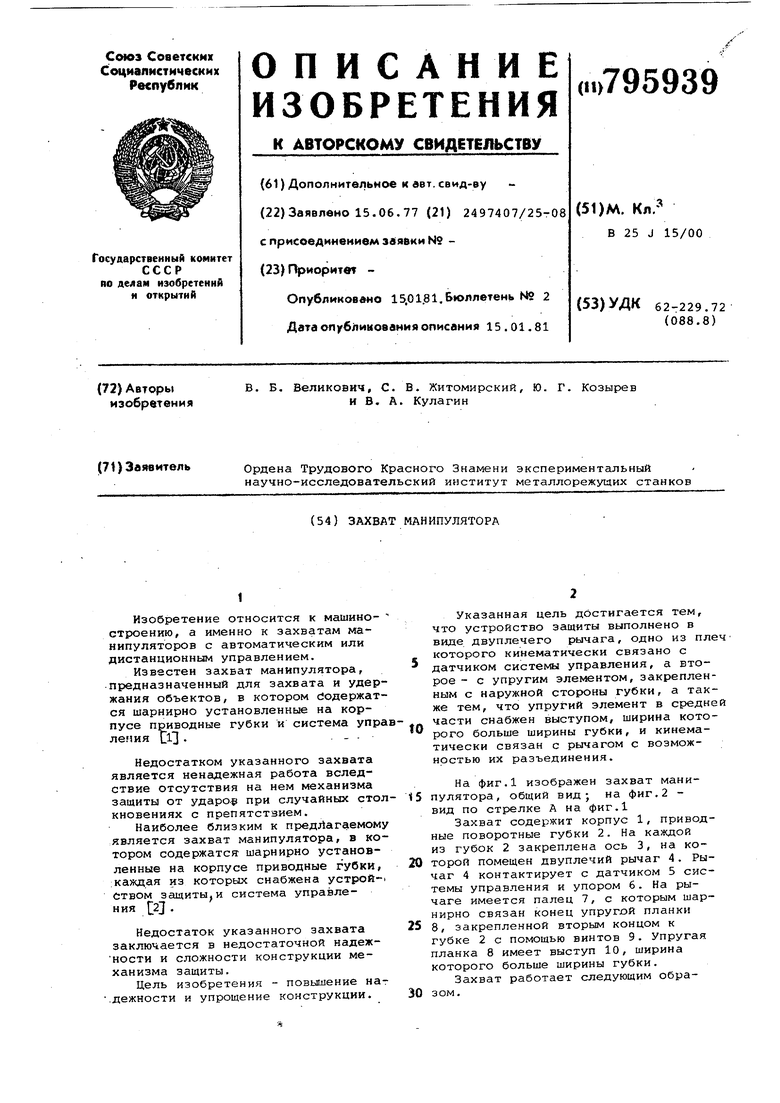
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для извлечения отливок из пресс-формы машины литья под давлением | 1978 |
|
SU704717A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Захват-кантователь | 1987 |
|
SU1472411A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВОК В ПРЕСС | 1993 |
|
RU2063287C1 |
| Устройство для базирования деталей | 1986 |
|
SU1366357A1 |
| Устройство для автоматического управления рабочим органом почвообрабатывающего орудия в ряду растений | 1981 |
|
SU1105134A1 |
| Захват-кантователь | 1984 |
|
SU1299939A1 |
| Устройство для сборки керамических пластинчатых конденсаторов с однонаправленными выводами | 1989 |
|
SU1653015A1 |
| Установка для стыковой индукционной сварки трубчатых изделий | 1989 |
|
SU1673346A1 |
| Схват манипулятора | 1985 |
|
SU1294605A1 |
