Изобретения относятся к области радиолокации и могут быть использованы для контроля работоспособности радиолокационных станций (РЛС).
Одной из важных задач в радиолокации является контроль работоспособности РЛС в процессе ее работы. Современные РЛС являются сложным комплексом, состоящим из антенны (как правило в виде фазированной антенной решетки (ФАР) в настоящее время и в перспективе), передатчика (передатчика на электровакуумных приборах, распределенных твердотельных передатчиков на полупроводниковых усилительных приборах и т.п.) приемника (разнообразные варианты радиолокационных приемников), устройств обработки, синхронизации, индикации и т.д. Контроль работоспособности РЛС, как правило, реализуется в виде автономного контроля в самих устройствах. То есть, автономно производится контроль работоспособности узлов ФАР, контроль мощности передающего устройства, контроль коэффициента шума (КШ) приемного устройства и т.д. Общая оценка работоспособности РЛС проводится по совокупности оценок работоспособности (исправности) входящих в РЛС устройств. Но некоторые узлы РЛС (элементы тракта, излучателей, пассивных СВЧ устройств и многих других) не имеют автономного контроля, хотя их отказы влияют на работоспособность РЛС.
Надежность работы РЛС во многом зависит от возможности оперативного контроля основных узлов РЛС, а именно: антенной системы, передатчика и приемника и особенно он важен в РЛС с активной фазированной антенной решеткой (АФАР). Иначе говоря, важным является контроль состояния диаграммы направленности ДН антенны, определяющей не только дальность действия РЛС и угловые точности измерения координат цели, но и ее помехозащищенность, зависящую от уровня боковых лепестков ДН. ДН антенной решетки определяется амплитудно-фазовым распределением возбуждения излучателей. Неисправность любого из них приводит к искажению ДН антенны. Особенно сложно контролировать работоспособность РЛС, выполненных на базе АФАР, которая состоит из множества одновременно работающих приемо-передающих модулей.
Известен способ контроля ДН, основанный на использовании дополнительных устройств, поворотного стенда, либо механического зонда [Восстановление распределения поля в раскрыве решетки модуляционным способом А.А. Леманский, B.C. Рабинович, В.Г. Соколов. Ж. Радиотехника и электроника, 1976, т21, вып. 3 с. 616-620]. Способ основан на измерении амплитуды и фазы возбуждения элементов ФАР с помощью неподвижного зонда.
Недостатком этого способа является необходимость наличия специального стенда с зондовой антенной и невозможность использования данного способа во время работы РЛС.
Известен способ определения ДН антенны в дальней зоне на основе измерений в ближней зоне [Курочкин А.П. ж. Теория и техника антенных измерений №7, 209 г., с. 39-45].
Суть способа состоит в прямых измерениях амплитудно-фазового распределения в антенне в ближней зоне В некоторых РЛС и восстановлении расчетным путем поля в дальней зоне.
Недостаток этого способа состоит в том, что для проведения измерений необходима безэховая камера и сложность математических вычислений, а так же невозможность использования его во время работы РЛС.
Наиболее близким к заявленному способу является способ контроля ДН антенны РЛС, основанный на сканировании луча антенны с помощью механического поворота антенны, использовании вынесенного источника сигнала и регистрации уровней принимаемых сигналов [Вестник концерна ВКО Алмаз - Антей №4 2016 г. с. 33, первая полоса последний абзац].
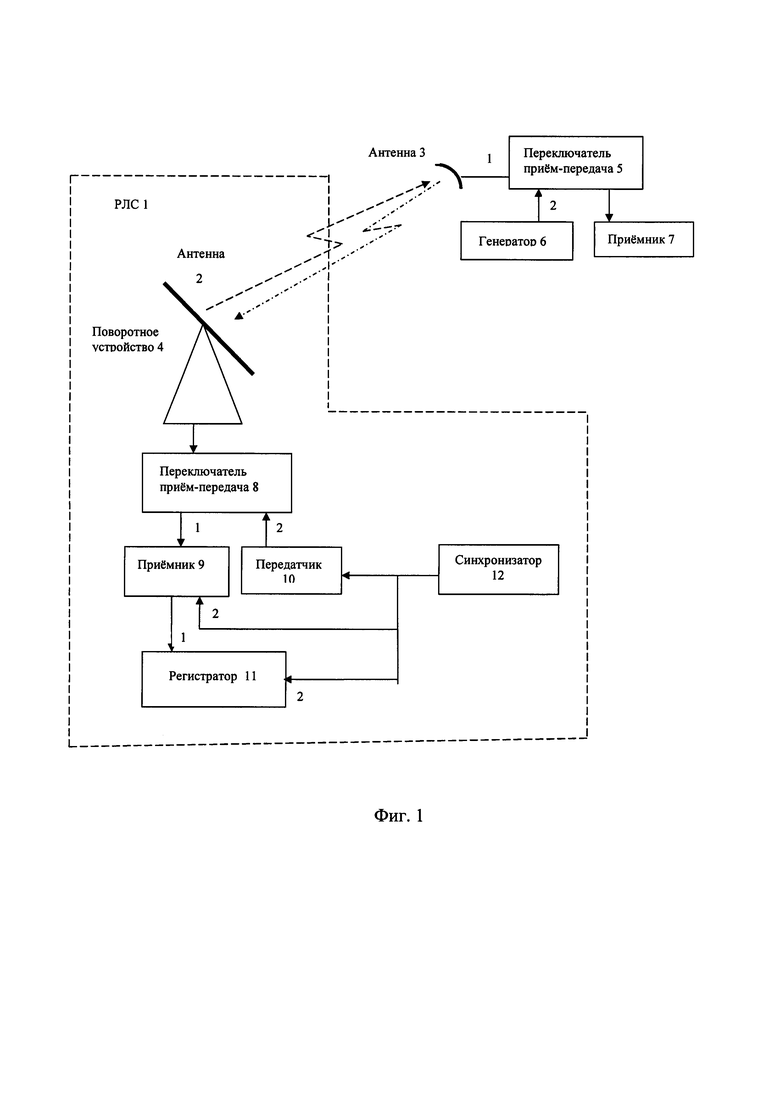
На фиг. 1 приведена схема комплекса, реализующего наиболее близкий к заявляемому способ. Комплекс включает в себя РЛС 1, а в качестве источника сигнала используют вспомогательный генератор 6 и антенну 3, которая формирует падающее на раскрыв антенны 2 электромагнитное поле с плоским фазовым фронтом, переключатель прием-передача 5 и приемник 7, РЛС 1 включает в себя антенну 2, поворотное устройства 4, переключатель прием-передача 8, приемник 9 и передатчик 10, регистратор 11 и синхронизатор 12, генератор 6 и антенну 3, переключатель прием-передача 5 и приемник 7 располагают удаленно, выход антенны 3 соединен с первым входом переключателя прием- передача 5, выход которого соединен с входом приемника 7, а второй вход соединен с выходом генератора 6, антенна 2 закреплена на поворотном устройстве 4, выход антенны 2 соединен с первым входом переключателя прием- передача 8, а его выход соединен с входом приемника 9, второй вход переключателя прием-передача 8 соединен с выходом передатчика 10, выход приемника 9 соединен с входом регистратора 11, выход синхронизатора 8 соединен со вторыми входами приемника 9, регистратора 11 и входом передатчика 10. Амплитудно-фазовое распределение в раскрыве антенны 2 не изменяется, а раскрыв антенны 2 поворачивают на некоторый угол  , который изменяют в процессе измерений. При этом в направлении приема сигнала от антенны 3 оказывается уровень ДН антенны 2, расположенный в исходной ДН на угле , который фиксируют при измерениях в регистраторе 11.
, который изменяют в процессе измерений. При этом в направлении приема сигнала от антенны 3 оказывается уровень ДН антенны 2, расположенный в исходной ДН на угле , который фиксируют при измерениях в регистраторе 11.
Недостатком этого способа контроля ДН антенны РЛС является необходимость применения дополнительного источника сигнала, переключателя прием-передача и приемника, расположенных удаленно и невозможности его использования в процессе контроля основных узлов РЛС (антенны, приемника и передатчика) во время работы РЛС.
Таким образом, решаемой технической проблемой (техническим результатом) является обеспечение контроля ДН антенны, приемника и передатчика в процессе работы РЛС.
Техническая проблема решается на основе использования сканирования луча антенны в процессе обзора пространства и зондирующего сигнала РЛС.
Поставленная проблема (технический результат) решается тем, что в способе контроля работоспособности радиолокационной станции, основанном на сканировании диаграммы направленности антенны и регистрации уровня принятого сигнала, согласно изобретению после окончания излучения зондирующего сигнала по сигналу от синхронизатора открывают приемник РЛС и приемник дополнительного канала с ненаправленной антенной, принимают концевую часть излученного зондирующего сигнала, отраженную от контрольного отражателя, записывают в регистратор уровни принятых сигналов, строят их зависимость от углового положения направления осмотра, получают соответственно передающую диаграмму направленности антенны и произведение передающей ДН и приемной ДН антенны РЛС, сравнивают с эталонными и принимают решение о работоспособности антенной, приемной и передающей систем РЛС или их неисправности.
Поставленная проблема (технический результат) решается так же тем, что согласно изобретению на исправной РЛС записывают в круговую уровни принятых сигналов в регистратор эталонов, строят по ним диаграммы направленности антенны и используют эти эталоны для контроля антенной, передающей и приемной систем РЛС.
Поставленная проблема (технический результат) решается так же тем, что согласно изобретению по сигналу от синхронизатора открывают для записи регистратор только на время приема сигнала, отраженного от контрольного отражателя.
Поставленная проблема (технический результат) решается тем, что в комплекс для осуществления заявленного способа, содержащий радиолокационную станцию, РЛС включает в себя параболическую антенну или фазированную антенную решетку - далее просто антенну, поворотное устройство, переключатель прием-передача, приемник, регистратор, синхронизатор, антенна закреплена на поворотном устройстве, выход антенны подключен к первому входу переключателя прием-передача, выход которого соединен с первым входом приемника РЛС, выход приемника соединен с первым входом регистратора, выход передатчика соединен со вторым входом переключателя прием-передача, вторые входы приемника и регистратора, а также вход передатчика соединены с выходом синхронизатора, согласно изобретению в комплекс введены контрольный отражатель, закрепленный на мачте, установленной в начале дальней зоны антенны РЛС, дополнительный канал приема, содержащий ненаправленная антенну и приемник, выход ненаправленной антенны соединен с входом приемника дополнительного канала, а в РЛС ведены, регистратор эталонов, схема сравнения и устройство анализа, выход приемника дополнительного канала соединен с третьим входом регистратора, выход регистратора соединен с первым входом схемы сравнения, выход регистратора эталонов соединен со вторым входом схемы сравнения, выход схемы сравнения соединен с входом устройства анализа, первый и второй входы регистратора эталонов выполнены с возможностью подключения к ним выходов приемников.
Суть предлагаемого изобретения состоит в том, чтобы обеспечить контроль исправности антенны, приемника и передатчика в процессе работы РЛС. Особенность работы импульсной РЛС состоит в том, что приемник РЛС закрывают на время прохождения зондирующего сигнала зоны, протяженность которой, определяется длительностью зондирующего сигнала и равна половине произведения длительности импульса на скорость света. Так, например, при длительности зондирующего сигнала равной 100 мкс протяженность этой зоны равняется 15 км. Дело в том, что, до тех пор, пока зондирующий сигнал не пройдет это расстояние, РЛС не может принять полноценный отраженный от цели, находящейся в этой зоне, сигнал. Располагать контрольный отражатель на удаленности в 15 км для получения полноценного отраженного сигнала технически сложно (нужна высокая мачта из за кривизны земли) и не годится для непрерывного контроля работающей РЛС.
Поставленная проблема решается тем, что в начале дальней зоны устанавливают контрольный отражатель, закрепленный на мачте, а приемники открывают сразу после окончания зондирующего сигнала на время, в течении которого конечная часть зондирующего сигнала отразится от отражателя и дойдет до приемников, (см. Фиг. 3). Благодаря тому, что контрольный отражатель располагается вблизи от РЛС, в начале дальней зоны антенны, даже части излученного зондирующего сигнала, отраженной от контрольного отражателя, достаточно для его регистрации. Дальняя зона антенны начинается с расстояния, равного квадрату апертуры антенны деленному на длину волны [Справочник по радиолокации под ред. М. Скольника 1977 г. т. 2, с. 61, 9 строка снизу] и для дециметровых волн Lд составляет порядка сотни метров. Но так как приемник открывается не мгновенно, а за время Δtпр, и, кроме того, длительность принятого сигнала должна быть достаточной для регистрации и быть не меньше τотр, то при этом минимальное расстояние dм, на котором необходимо поставить мачту отражателя будет определяться по формуле
2dм=Lд+с×(Δtпр+τотр), где с - скорость света.
Например, при Lд=100 м, Δtпр=3 мкс, τотр=2 мкс и с=3×108 м/с, 2dм=1600 м, то есть мачту с отражателем достаточно поставить на дальности 800 м.
t3=dм/с - это время, необходимое для достижения концевой части зондирующего сигнала контрольного отражателя (см. фиг. 3)
Для адаптации динамического диапазона приемников к сигналам, принятым по главному лучу и боковым лепесткам, на их входах могут быть установлены управляемые аттенюаторы, управление которыми синхронизировано с временем приема отраженного сигнала и направлением главного луча. Высота мачты выбирается из условия возможности записи главного луча антенны. При этом контрольный отражатель должен быть выше центра антенны. В качестве контрольного отражателя может использоваться любой местный предмет, расположенный на подходящем расстоянии и имеющий локализованную отражающую поверхность на подходящей для измерений высоте.
После установки контрольного отражателя на заведомо исправной РЛС производят запись эталонных сигналов в регистратор эталонов, принятых основной антенной и дополнительной ненаправленной антенной. Запись производят путем отсоединения выходов приемника РЛС и приемника дополнительного канала от входов регистратора и соединение их с первым и вторым входами регистратора эталонов соответственно. Осуществляют это следующим образом. Отраженный от контрольного отражателя сигнал U0э(β,ε) принимают антенной РЛС и записывают в регистратор эталонов его уровень в зависимости от направления излучения. Одновременно записывают в регистратор эталонов уровень сигнала Uзэ(β,ε), принятого дополнительной ненаправленной антенной, так же в зависимости от направления излучения. По записанному в регистратор эталонов сигналу U0э(βε) строят диаграмму направленности антенны РЛС на прием и передачу, а по сигналу Uзэ(βε) диаграмму направленности антенны РЛС только на передачу в азимутальной и угломестной плоскостях. В записанных диаграммах содержится информация о работе передатчика (уровень диаграммы на передачу), информация о работе приемника (уровень диаграммы на передачу и прием), информация о фазовом и амплитудном распределении сигнала в плоскости антенны (для антенны с ФАР, уровень боковых лепестков). При этом запись эталонов производят при работе РЛС в режиме обзора пространства. После записи эталонов соединения в РЛС восстанавливают согласно схемы фиг. 2. Работа всех элементов РЛС, регистратора, приемника и передатчика, а так же дополнительного канала, осуществляется синхронно с помощью синхронизатора.
После восстановления исходного состояния связей в РЛС происходит обычная работа в режиме обзора пространства. При этом происходит сравнение записываемых уровней U0(β,ε) и Uз(β,ε) в реальном времени с их эталонными уровнями. Обнаруженные при этом отклонения могут однозначно указывать на неисправности в отдельных системах РЛС - антенной, передающей или приемной. Отличия эталонных значений уровней сигналов и реально записываемых допускается в пределах допусков на измерение уровней сигналов.
Признаком исправности РЛС является:
U0(β1, ε1)=U0э(β1, ε1)
Uз(β1, ε1)=Uзэ(β1, ε1)
Признаком неисправности антенны (увеличение боковых лепестков) является:
ДН0(β1, ε1)≠ДН0э(β1, ε1)
ДНз(β1, ε1)≠ДНзэ(β1, ε1)
Признаком неисправности передатчика является:
U0(β1, ε1)<U0э(β1, ε1)
Uз(β1, ε1)<Uзэ(β1, ε1)
Признаком неисправности приемника является:
U0(β1, ε1)<U0э(β1, ε1)
Uз(β1, ε1)=Uзэ(β1, ε1)
Таким образом решается поставленная проблема и достигается технический результат.
Изобретение иллюстрируется чертежами.
На фиг. 1 приведена схема комплекса прототипа.
На фиг. 2 приведена схема предлагаемого комплекса.
На фиг. 3 показано временное положение зондирующего сигнала и сигнала, отраженного от контрольного отражателя и принятого открытым приемником РЛС.
На первой диаграмме показано положение излученного зондирующего сигнала относительно антенны РЛС и контрольного отражателя в момент открывания приемника Δtпр.
На второй диаграмме показано временное положение t3 концевой части зондирующего сигнала при достижении им контрольного отражателя.
На третьей диаграмме показана длительность τотр отраженного от контрольного отражателя сигнала, принятого после открывания приемника. Видно, что прием отраженного от контрольного отражателя сигнала начинается сразу после открывания приемника Δtпр и заканчивается приемом отражения концевой части зондирующего сигнала в момент времени 2 t3.
На фиг. 4а показана исправная ДН антенны, а на фиг. 4б ее разность с эталоном, равная нулю для всех направлений.
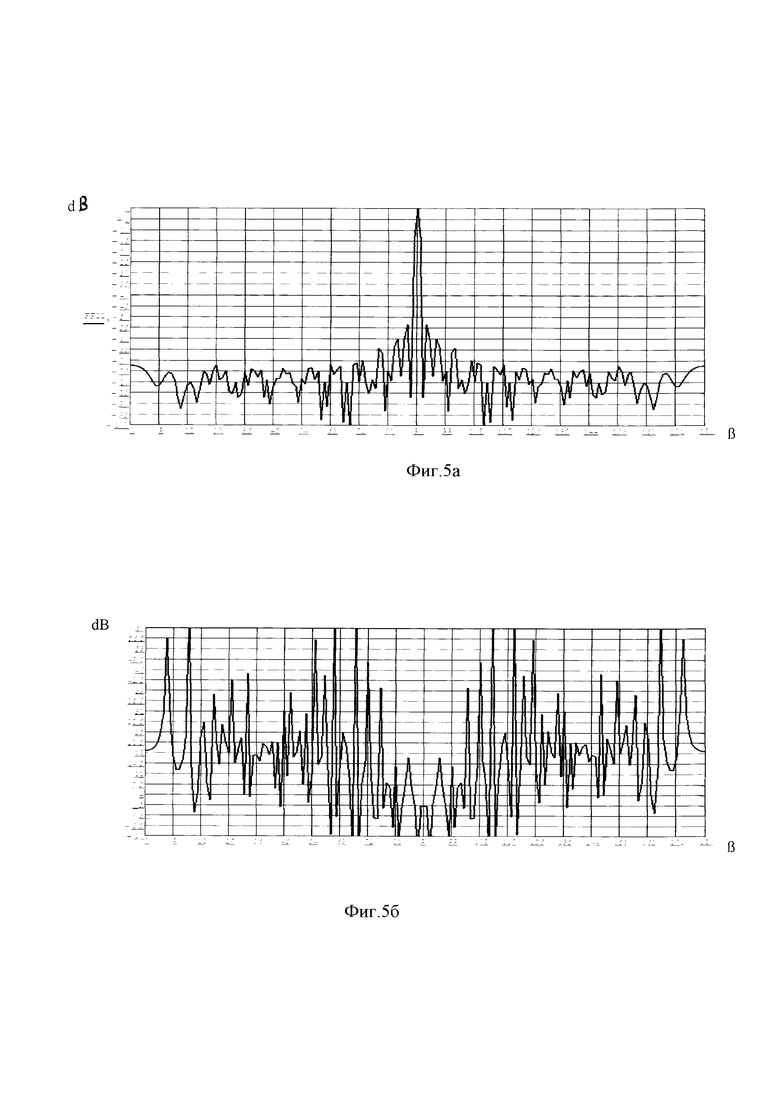
На фиг. 5а показана ДН антенны с неисправными 10-ю линейками ФАР, а на фиг. 5б ее разность с ДН эталона. Из диаграммы видно, что неисправности в линейках существенно сказываются на боковых лепестках ДН антенны.
Расчеты проводились для случая антенны с фазированными Ш -линейками.
Заявленный комплекс, для осуществления способа контроля работоспособности РЛС (Фиг. 2) содержит РЛС 1, в РЛС 1 входят антенна 2 (ФАР, или параболическая), поворотное устройство 4, переключатель прием-передача 8, приемник 9, передатчик 10, регистратор 11, антенна дополнительного канала 13, приемник дополнительного канала 14, регистратор эталонов 15, схему сравнения 16, устройство анализа 17 и синхронизатор 12, антенну 18 с мачтой размещают в начале дальней зоны антенны 2, антенна 2 закреплена на поворотном устройстве 4, выход антенны 2 соединен с входом переключателя прием-передача 8, выход которого соединен с первым входом приемником 9, выход передатчика 10 соединен со вторым входом переключателя прием-передача 8, выход приемника 9 соединен с первым входом регистратора 11, выход антенны 13 соединен с входом приемника дополнительного канала 14, выход приемника дополнительного канала 14 соединен с третьим входом регистратора 11, а его выход соединен с первым входом схемы сравнения 16, второй вход схемы сравнения 16 соединен с выходом регистратора эталонов 15, выход схемы сравнения 16 соединен с входом устройства анализа 17.
Рассмотрим более подробно осуществимость способа и комплекса (Фиг. 2) на конкретном примере. Суть предлагаемого изобретения состоит в том, чтобы обеспечить контроль исправности антенны 2, приемника 9 и передатчика 10 в процессе работы РЛС 1. Эта проблема решается тем, что в начале дальней зоны антенны 2 устанавливают контрольный отражатель 16 на мачте, а приемник 9 РЛС 1 и приемник 14 дополнительного канала открывают сразу после окончания излучения зондирующего сигнала на время, в течении которого концевая часть излученного зондирующего сигнала отразится от отражателя 18 и дойдет до антенн 2 и 13 (см. Фиг. 3). Отраженные сигналы U0э(β,ε) и Uзэ(β,ε), принятые антенной 2 и дополнительной антенной 13 при заведомо исправной РЛС 1 записывают в регистратор эталонов 15. Для этого выходы приемников 9 и 12 отсоединяют от входов 1 и 3 регистратора 11 и подключают к входам 1 и 2 регистратора эталонов 15 соответственно. При этом поворотное устройство 4 сканирует ДН антенны 2 в азимутальной ε и угломестной β плоскостях. По результатам записи U0э(β,ε) формируется эталонная ДН антенны 2 на передачу и прием, а по Uз(β,ε) формируется эталонная ДН антенны 2 только на передачу. В записанных диаграммах содержится информация о работе передатчика 10 (уровень диаграммы только на передачу), информация о работе приемника 9 (уровень диаграммы на прием и передачу), информация о фазовом и амплитудном распределении сигнала в плоскости антенны 2 (уровень боковых лепестков). Записи эталонов производят в режиме обычного обзора пространства РЛС 1. После записи эталонных значений U0э(β,ε) и Uзэ(β,ε) связи в РЛС 1 восстанавливают согласно схемы фиг. 2.
Важно отметить, что в процессе обычной работы РЛС происходит сравнение эталонных показателей из регистратора эталонов 15 ДН антенны 2 с реально записываемыми в регистратор 11. Обнаруженные отклонения могут однозначно указывать на неисправности в отдельных элементах РЛС 1.
Таким образом решается поставленная проблема и достигается технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиолокационная станция кругового обзора | 2018 |
|
RU2691129C1 |
| СПОСОБ ЗАЩИТЫ ОТ ПАССИВНЫХ ПОМЕХ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2358285C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ ОБЪЕКТОВ И РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2371730C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ | 1998 |
|
RU2127437C1 |
| Двухэтапный способ измерения координат цели и устройство для его осуществления | 2017 |
|
RU2645741C1 |
| СПОСОБ РАДИОЛОКАЦИИ И РАДИОЛОКАТОР С ДОПЛЕРОВСКИМ ПЕРЕДАТЧИКОМ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2580507C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И КВАЗИНЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ | 2012 |
|
RU2510685C2 |
| СОВМЕЩЕННАЯ СИСТЕМА РАДИОЛОКАЦИИ И СВЯЗИ НА РАДИОФОТОННЫХ ЭЛЕМЕНТАХ | 2018 |
|
RU2697389C1 |
| ОБЗОРНЫЙ РАДИОЛОКАТОР | 1981 |
|
SU1840941A1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИАГРАММЫ ОБРАТНОГО ВТОРИЧНОГО ИЗЛУЧЕНИЯ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2267136C1 |



Изобретения относятся к области радиолокации и могут быть использованы для контроля работоспособности радиолокационных станций (РЛС). Достигаемый технический результат - обеспечение контроля диаграммы направленности антенны, приемника и передатчика в процессе работы РЛС. Указанный технический результат достигается тем, что в способе контроля работоспособности РЛС, основанном на сканировании диаграммы направленности антенны и регистрации уровня принятого сигнала, после окончания излучения зондирующего сигнала по сигналу от синхронизатора открывают приемник РЛС и приемник дополнительного канала с ненаправленной антенной, принимают концевую часть излученного зондирующего сигнала, отраженную от контрольного отражателя, записывают в регистратор уровни принятых сигналов, строят их зависимость от углового положения направления осмотра, получают соответственно передающую диаграмму направленности антенны и произведение передающей ДН и приемной ДН антенны РЛС, сравнивают с эталонными и принимают решение о работоспособности антенной, приемной и передающей систем РЛС или их неисправности. Указанный результат достигается также тем, что комплекс для осуществления способа содержит РЛС, включающую в себя параболическую антенну или фазированную антенную решетку - далее просто антенну, поворотное устройство, переключатель прием-передача, приемник, регистратор, синхронизатор, при этом антенна закреплена на поворотном устройстве, выход антенны подключен к первому входу переключателя прием-передача, выход которого соединен с первым входом приемника РЛС, выход приемника соединен с первым входом регистратора, выход передатчика соединен со вторым входом переключателя прием-передача, вторые входы приемника и регистратора, а также вход передатчика соединены с выходом синхронизатора, комплекс также содержит контрольный отражатель, закрепленный на мачте, установленной в начале дальней зоны антенны РЛС, дополнительный канал приема, содержащий ненаправленную антенну и приемник, выход ненаправленной антенны соединен с входом приемника дополнительного канала, при этом РЛС также содержит регистратор эталонов, схему сравнения и устройство анализа, выход приемника дополнительного канала соединен с третьим входом регистратора, выход регистратора соединен с первым входом схемы сравнения, выход регистратора эталонов соединен со вторым входом схемы сравнения, выход схемы сравнения соединен с входом устройства анализа, первый и второй входы регистратора эталонов выполнены с возможностью подключения к ним выходов приемников. 2 н. и 2 з.п. ф-лы, 5 ил.
1. Способ контроля работоспособности радиолокационной станции (РЛС), основанный на сканировании диаграммы направленности антенны (ДН) и регистрации уровня принятого сигнала, отличающийся тем, что после окончания излучения зондирующего сигнала по сигналу от синхронизатора открывают приемник РЛС и приемник дополнительного канала с ненаправленной антенной, принимают концевую часть излученного зондирующего сигнала, отраженную от контрольного отражателя, записывают в регистратор уровни принятых сигналов, строят их зависимость от углового положения направления осмотра, получают соответственно передающую диаграмму направленности антенны и произведение передающей ДН и приемной ДН антенны РЛС, сравнивают с эталонными и принимают решение о работоспособности антенной, приемной и передающей систем РЛС или их неисправности.
2. Способ контроля работоспособности РЛС по п. 1, отличающийся тем, что на исправной РЛС записывают в круговую уровни принятых сигналов в регистратор эталонов, строят по ним диаграммы направленности антенны и используют эти эталоны для контроля антенной, передающей и приемной систем РЛС.
3. Способ контроля работоспособности РЛС по п. 1, отличающийся тем, что по сигналу от синхронизатора открывают для записи регистратор только на время приема сигнала, отраженного от контрольного отражателя.
4. Комплекс для осуществления заявленного способа, содержащий радиолокационную станцию (РЛС), РЛС включает в себя параболическую антенну или фазированную антенную решетку - далее просто антенну, поворотное устройство, переключатель прием-передача, приемник, регистратор, синхронизатор, антенна закреплена на поворотном устройстве, выход антенны подключен к первому входу переключателя прием-передача, выход которого соединен с первым входом приемника РЛС, выход приемника соединен с первым входом регистратора, выход передатчика соединен со вторым входом переключателя прием-передача, вторые входы приемника и регистратора, а также вход передатчика соединены с выходом синхронизатора, отличающийся тем, что в комплекс введены контрольный отражатель, закрепленный на мачте, установленной в начале дальней зоны антенны РЛС, дополнительный канал приема, содержащий ненаправленную антенну и приемник, выход ненаправленной антенны соединен с входом приемника дополнительного канала, а в РЛС введены регистратор эталонов, схема сравнения и устройство анализа, выход приемника дополнительного канала соединен с третьим входом регистратора, выход регистратора соединен с первым входом схемы сравнения, выход регистратора эталонов соединен со вторым входом схемы сравнения, выход схемы сравнения соединен с входом устройства анализа, первый и второй входы регистратора эталонов выполнены с возможностью подключения к ним выходов приемников.
| УСТРОЙСТВО КАЛИБРОВКИ НАЗЕМНЫХ РАДИОЛОКАЦИОННЫХ ИЗМЕРИТЕЛЬНЫХ КОМПЛЕКСОВ ПОД МАЛЫМИ УГЛАМИ МЕСТА | 2004 |
|
RU2278396C2 |
| СПОСОБ ВСТРОЕННОГО КОНТРОЛЯ БОРТОВОЙ МОНОИМПУЛЬСНОЙ РЛС И УСТРОЙСТВА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2268478C2 |
| Способ и система для контроля радиолокационной станции | 2016 |
|
RU2648585C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИАГРАММЫ ОБРАТНОГО ВТОРИЧНОГО ИЗЛУЧЕНИЯ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2267136C1 |
| JP 59147284 A, 23.08.1984 | |||
| US 7982664 B1, 19.07.2011 | |||
| WO 1998028633 A1, 02.07.1998 | |||
| Способ поверхностной проклейки бумаги и картона | 1981 |
|
SU996595A1 |

