Область техники
Настоящее изобретение относится к области техники конвейерного оборудования для стального стержня, в частности, к конвейерному оборудованию для поперечного шагового перемещения стального стержня, которое имеет простую конструкцию, просто в эксплуатации, перемещает стальные стержни исправно и эффективно и может значительно снизить трудовые затраты, а также к способу его управления им.
Предпосылки изобретения
В настоящее время стальные стержни необходимо вручную размещать последовательно на оборудовании для обработки или рабочей платформе для обработки до обработки. Такой способ имеет низкую производительность и высокие трудовые затраты. Для решения этой проблемы существуют некоторые патентные документы, относящиеся к автоматическому оборудованию для перемещения стального стержня. Такое оборудование занимает большую площадь, имеет сложную структуру, низкую эффективность и требует высоких производственных затрат.
Краткое описание
Цель настоящего изобретения заключается в предоставлении конвейерного оборудования для поперечного шагового перемещения стального стержня, которое имеет простую конструкцию, просто в эксплуатации, перемещает стальные стержни исправно и эффективно и может значительно снизить трудовые затраты, а также способа управления им.
Техническое решение настоящего изобретения заключается в следующем: Конвейерное оборудование для поперечного шагового перемещения стального стержня содержит основание (1), при этом передняя подвижная зажимная область (2) и задняя неподвижная зажимная область (3) расположены на основании (1), и при этом передняя подвижная зажимная область (2) и задняя неподвижная зажимная область (3) соединены посредством соединительных рельсовых механизмов (4) задней неподвижной зажимной области для осуществления относительного поступательного движения;
передняя подвижная зажимная область (2) состоит из зажима (5) передней подвижной зажимной области, подвижной вправо-влево пластины (6) передней подвижной зажимной области и подвижной вверх-вниз пластины (7) передней подвижной зажимной области, причем зажим (5) передней подвижной зажимной области неподвижно прикреплен к подвижной вверх-вниз пластине (7) передней подвижной зажимной области, и при этом подвижная вправо-влево пластина (6) передней подвижной зажимной области установлена на обратной поверхности подвижной вверх-вниз пластины (7) передней подвижной зажимной области и прикреплена с возможностью перемещения к подвижной вверх-вниз пластине (7) передней подвижной зажимной области; и
задняя неподвижная зажимная область (3) состоит из зажимного устройства (8) задней неподвижной зажимной области и неподвижной пластины (9) задней неподвижной зажимной области, причем зажимное устройство (8) задней неподвижной зажимной области установлено на неподвижной пластине (9) задней неподвижной зажимной области, и при этом зажимное устройство (8) задней неподвижной зажимной области состоит из зажима (10) задней неподвижной зажимной области и зажимной направляющей пластины (11) задней неподвижной зажимной области.
Наклонный паз (14) расположен в зажимной направляющей пластине (11) задней неподвижной зажимной области, при этом зажим (10) задней неподвижной зажимной области вставлен в наклонный паз (14), и при этом зажимное силовое устройство (12) задней неподвижной зажимной области зажимного устройства (8) задней неподвижной зажимной области поднимает зажимную направляющую пластину (9) задней неподвижной зажимной области для осуществления поперечного зажатия и разжатия зажима (10) задней неподвижной зажимной области вдоль наклонного паза (14).
Предоставлены 1, 2, 3, ..., n зажимных устройств (8) задней неподвижной зажимной области, соответственно предоставлены 2, 3, 4, ..., n+1 зажимов (5) передней подвижной зажимной области, и при этом зажимные устройства (8) задней неподвижной зажимной области и зажимы (5) передней подвижной зажимной области распределены на равном расстоянии в поперечном направлении.
Зажимная направляющая пластина (9) задней неподвижной зажимной области содержит симметрично расположенные переднюю направляющую пластину и заднюю направляющую пластину.
Соединительные рельсовые механизмы (4) задней неподвижной зажимной области между передней подвижной зажимной областью (2) и задней неподвижной зажимной областью (3) соединены посредством поперечного рельса; при этом подвижная вправо-влево пластина (6) передней подвижной зажимной области и подвижная вверх-вниз пластина (7) передней подвижной зажимной области соединены посредством продольного рельса; при этом неподвижная пластина (9) задней неподвижной зажимной области и зажимная направляющая пластина (11) задней неподвижной зажимной области соединены посредством продольного рельса; и при этом зажим (10) задней неподвижной зажимной области и неподвижная пластина (9) задней неподвижной зажимной области соединены посредством поперечного рельса.
Зажим (5) передней подвижной зажимной области осуществляет зажатие и разжатие за счет использования зажимного силового устройства (15) передней подвижной зажимной области.
Силовые устройства и зажимные устройства передней подвижной зажимной области (2) и задней неподвижной зажимной области (3) управляются программируемым логическим контроллером (ПЛК) пневматическим, гидравлическим или электрическим способом.
Способ управления конвейерным оборудованием для поперечного шагового перемещения стального стержня включает следующие этапы:
(1) этап 1: расположение зажима (5) передней подвижной зажимной области на нижнем конце стального стержня и обеспечение его разомкнутого состояния, и затем приведение в действие подвижной вверх-вниз пластиной (7) передней подвижной зажимной области зажима (5) передней подвижной зажимной области с поднятием;
(2) этап 2: поднятие зажима (5) передней подвижной зажимной области в положение на одном уровне с зажимом (10) задней неподвижной зажимной области и затем выполнение им зажимающего движения, а затем удерживание зажимом (5) передней подвижной зажимной области стального стержня с совместным поднятием;
(3) этап 3: удерживание стального стержня зажимом (5) передней подвижной зажимной области, затем их совместное поднятие в самое верхнее положение, и приведение в действие подвижной вправо-влево пластиной (6) передней подвижной зажимной области зажима (5) передней подвижной зажимной области и стального стержня с совместным перемещением влево;
(4) этап 4: совместное перемещение влево зажима (5) передней подвижной зажимной области и стального стержня, и затем приведение в действие подвижной вверх-вниз пластиной (7) передней подвижной зажимной области зажима (5) передней подвижной зажимной области и стального стержня с опусканием;
(5) этап 5: опускание зажима (5) передней подвижной зажимной области и стального стержня в открытое положение зажима (10) задней неподвижной зажимной области, при этом зажим (10) задней неподвижной зажимной области удерживает стальной стержень, и затем высвобождение стального стержня зажимом (5) передней подвижной зажимной области;
(6) этап 6: опускание зажима (5) передней подвижной зажимной области в самое нижнее положение и движение зажима (5) передней подвижной зажимной области вправо в первоначальное положение; и
(7) этап 7: повторение этапов 1–6 до перемещения стального стержня в заданное положение.
Положительный результат настоящего изобретения заключается в следующем: в конвейерном оборудовании для поперечного шагового перемещения стального стержня передняя подвижная зажимная область и задняя неподвижная зажимная область расположены на основании и соединены посредством соединительных рельсовых механизмов задней неподвижной зажимной области для осуществления относительного поступательного движения.
В конвейерном оборудовании для поперечного шагового перемещения стального стержня расположено множество групп зажимных механизмов. Подвижные зажимы удерживают стальной стержень и пошагово перемещают стальной стержень в следующее положение по порядку, а затем неподвижные зажимы удерживают стальной стержень, и при этом подвижные зажимы высвобождают стальной стержень, возвращаются в первоначальное положение, и повторяют предыдущие движения, пока пошаговое перемещение стального стержня не будет завершено.
Настоящее изобретение имеет простую конструкцию, требует низких производственных затрат, занимает небольшую площадь и может улучшить производительность.
Настоящее изобретение далее описано ниже со ссылкой на прилагаемые графические материалы и варианты осуществления.
Краткое описание чертежей
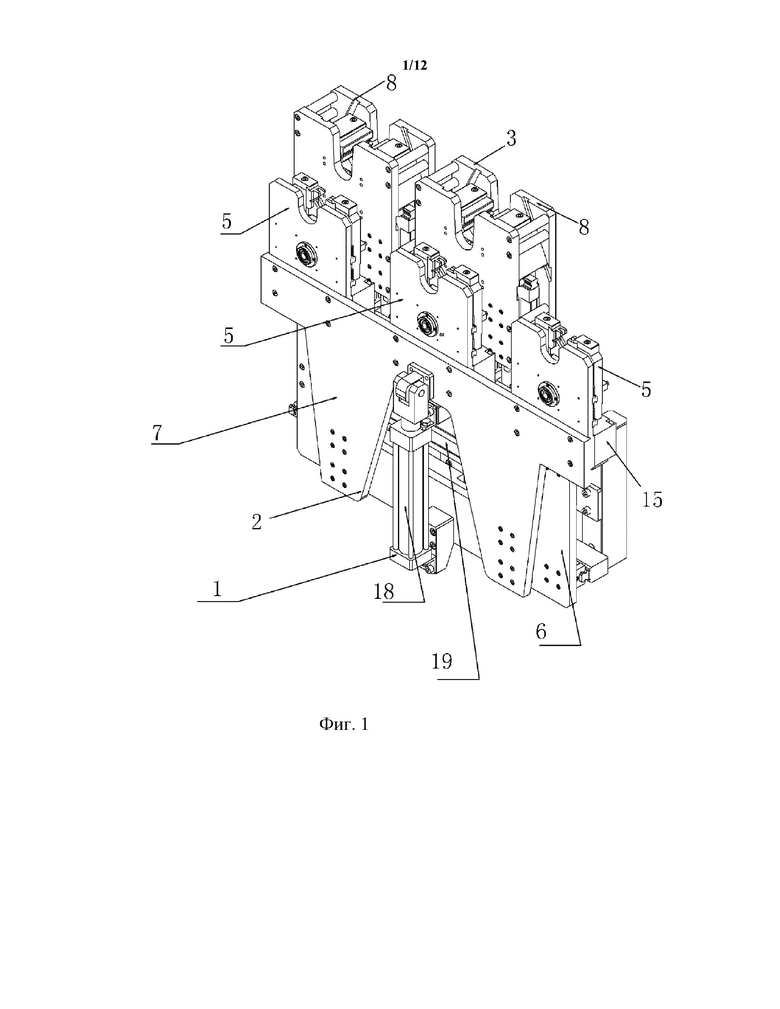
На фиг. 1 показана принципиальная схема конструкции согласно настоящему изобретению;
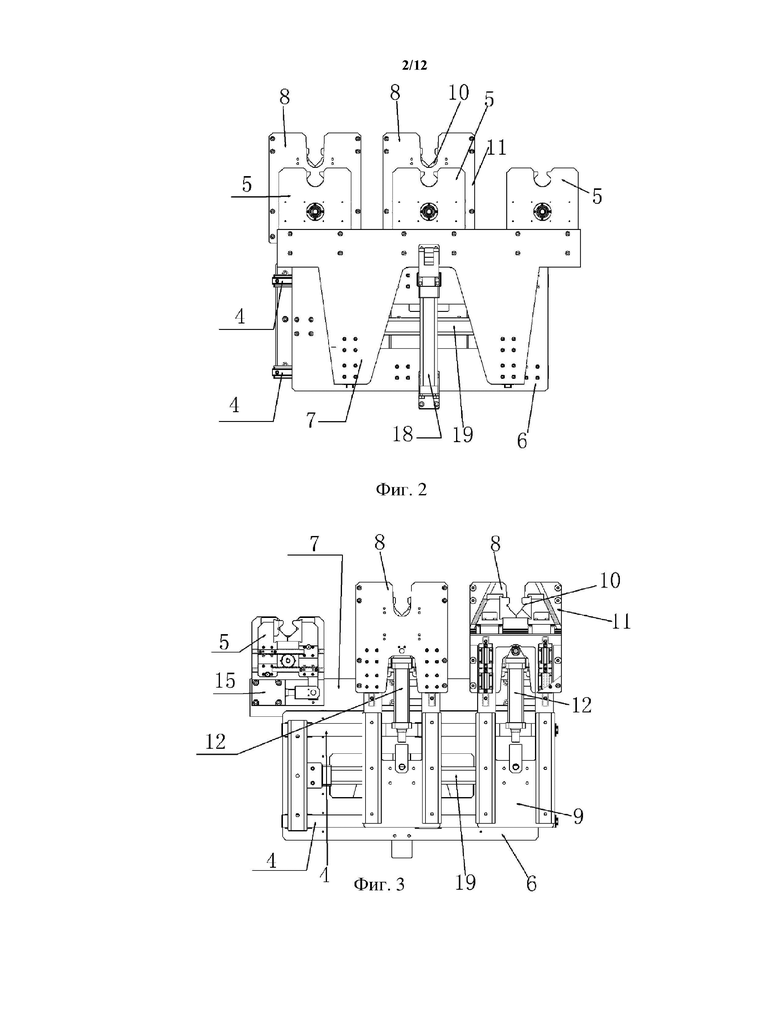
на фиг. 2 показан вид спереди по фиг. 1;
на фиг. 3 показан вид сзади по фиг. 1;
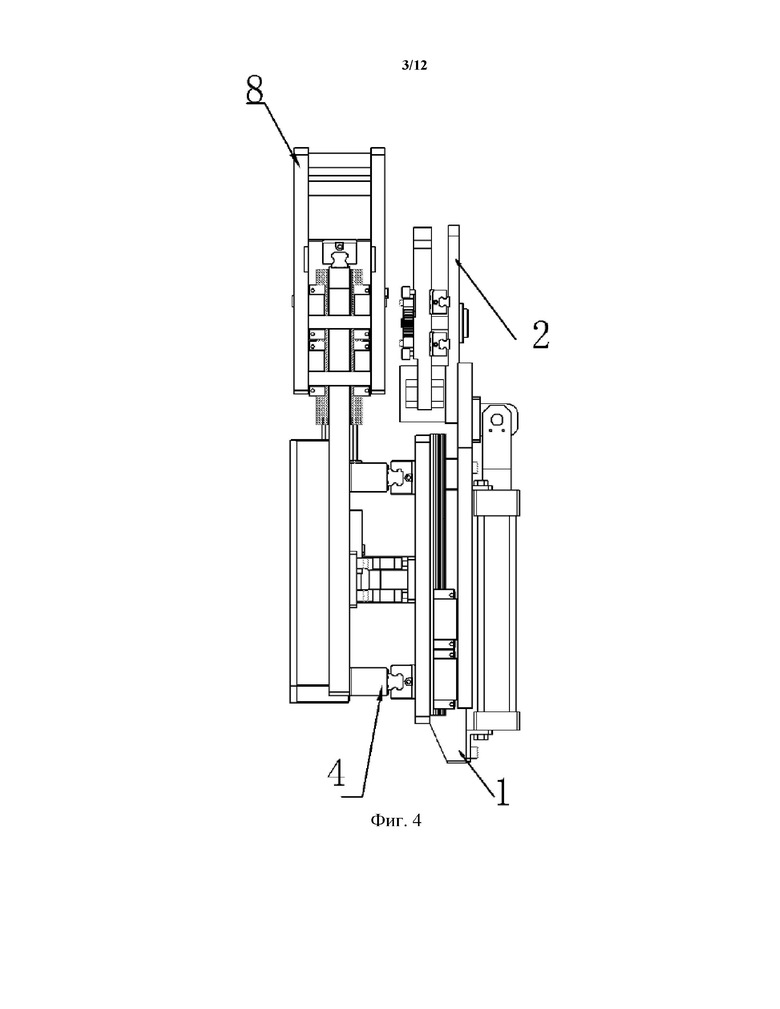
на фиг. 4 показан вид сбоку по фиг. 1;
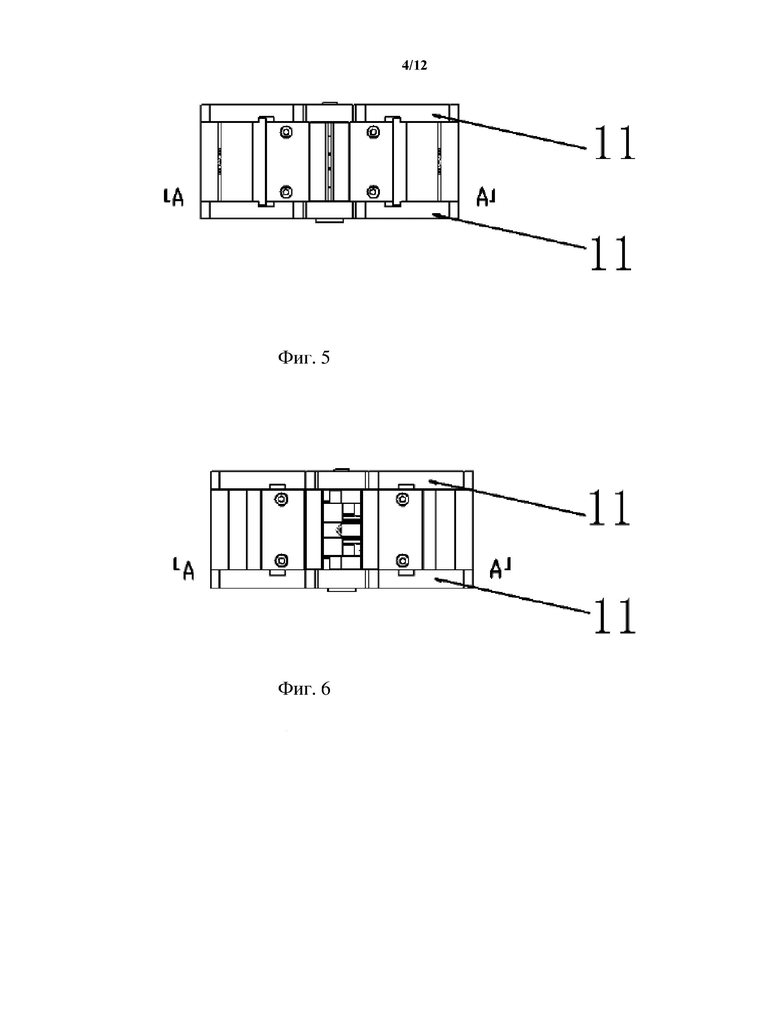
на фиг. 5 показана принципиальная схема зажимного устройства задней неподвижной зажимной области, когда зажим задней неподвижной зажимной области находится в состоянии удержания;
на фиг. 6 показана принципиальная схема зажимного устройства задней неподвижной зажимной области, когда зажим задней неподвижной зажимной области находится в разомкнутом состоянии;
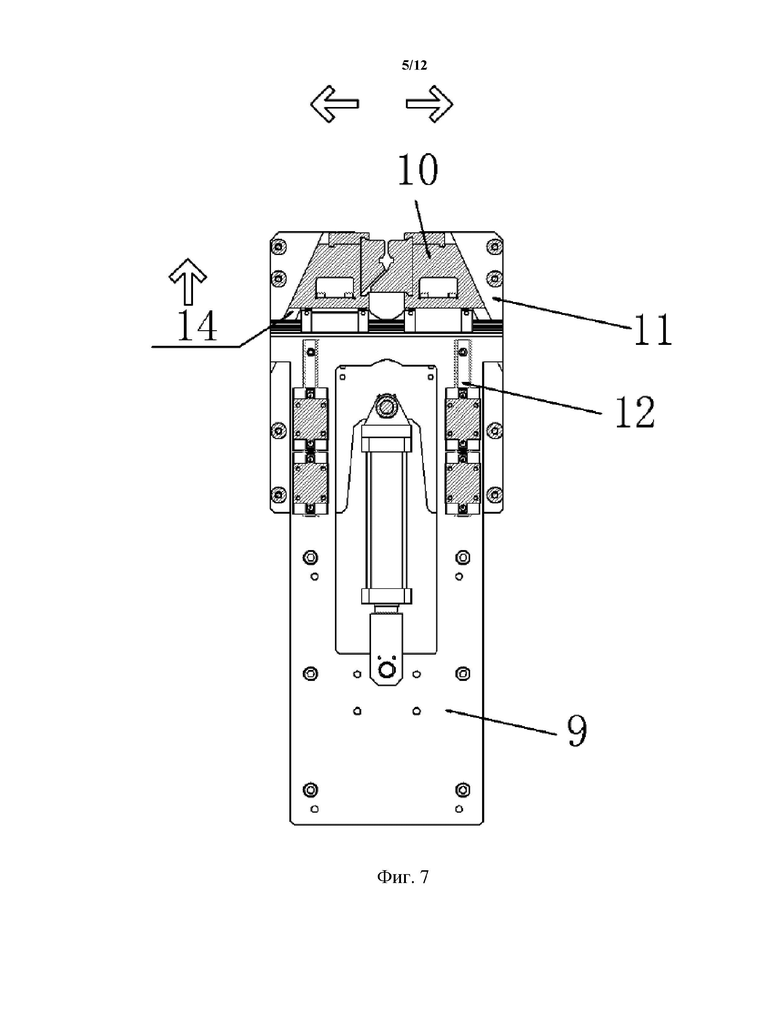
на фиг. 7 показан вид в направлении A–A по фиг. 5;
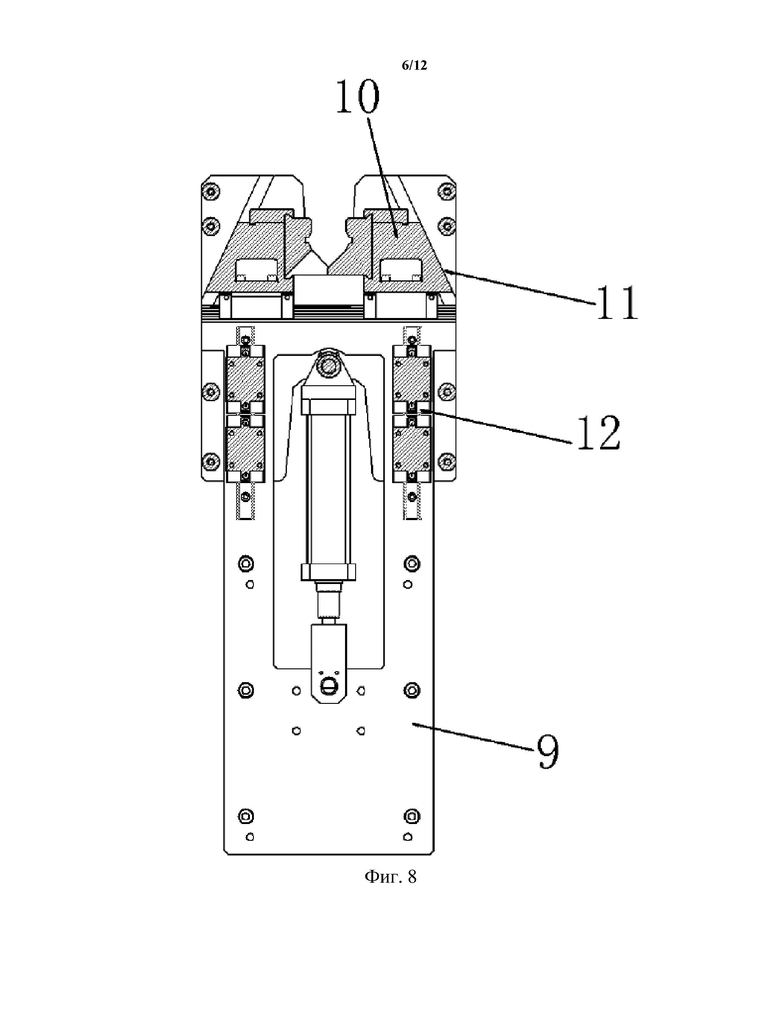
на фиг. 8 показан вид в направлении A–A по фиг. 6;
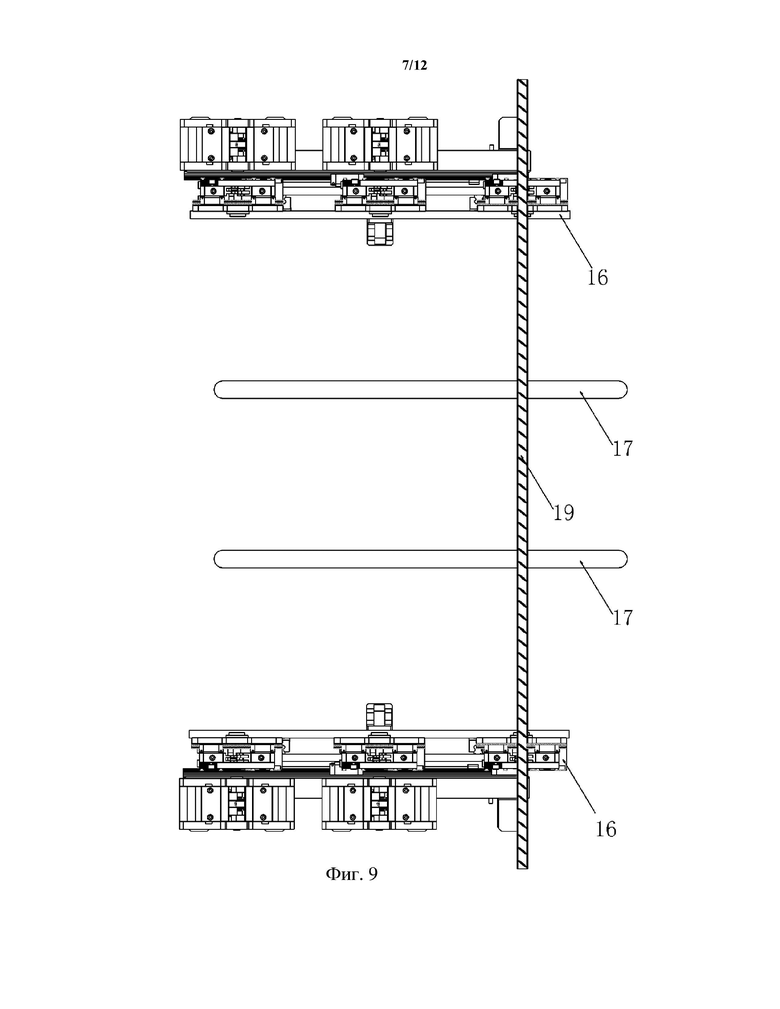
на фиг. 9 показана принципиальная схема конструкции в состоянии применения оборудования согласно настоящему изобретению;
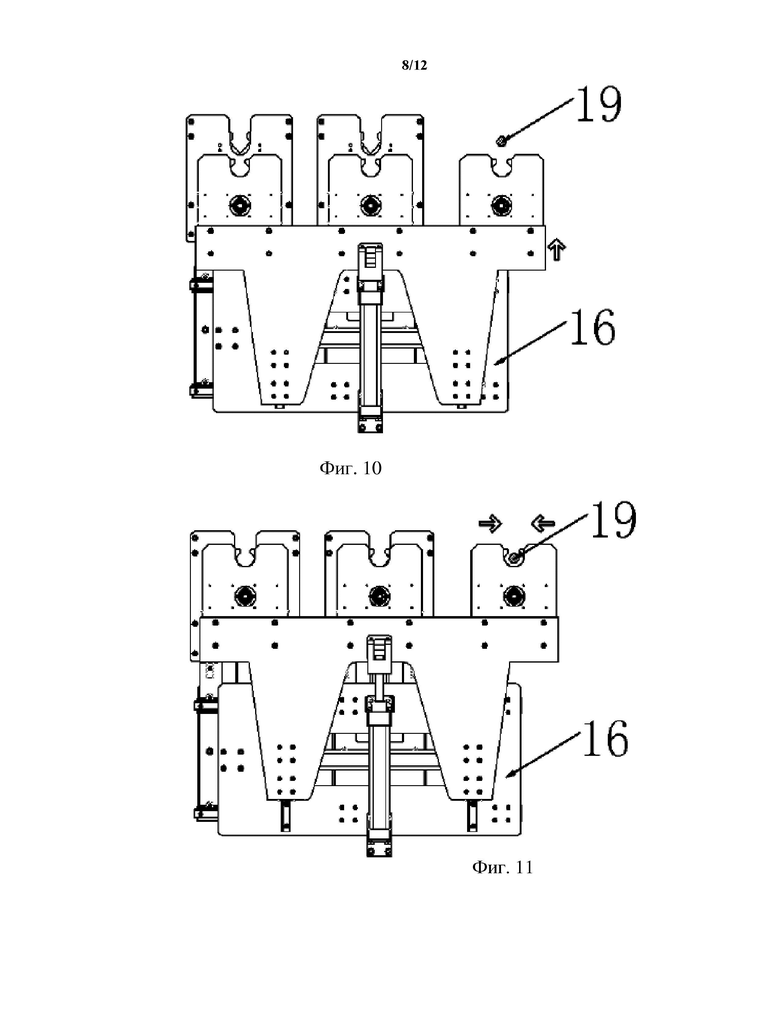
на фиг. 10 показана принципиальная схема конструкции в рабочем состоянии на первом этапе согласно настоящему изобретению;
на фиг. 11 показана принципиальная схема конструкции в рабочем состоянии на втором этапе согласно настоящему изобретению;
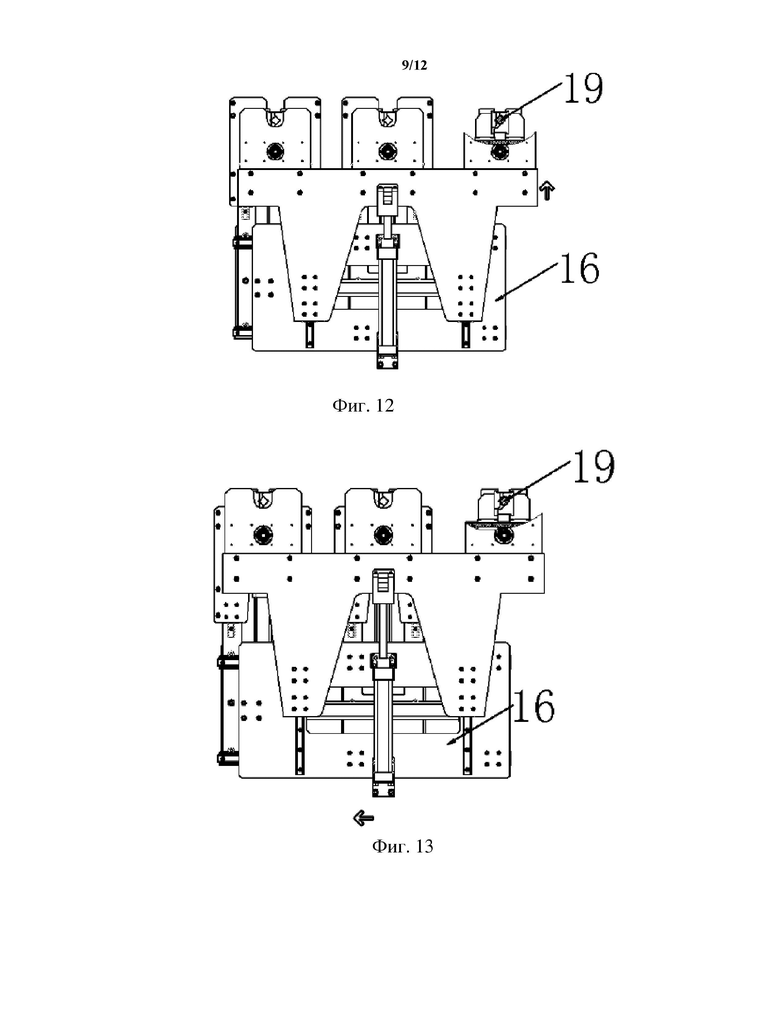
на фиг. 12 показана принципиальная схема конструкции в рабочем состоянии на третьем этапе согласно настоящему изобретению;
на фиг. 13 показана принципиальная схема конструкции в рабочем состоянии на четвертом этапе согласно настоящему изобретению;
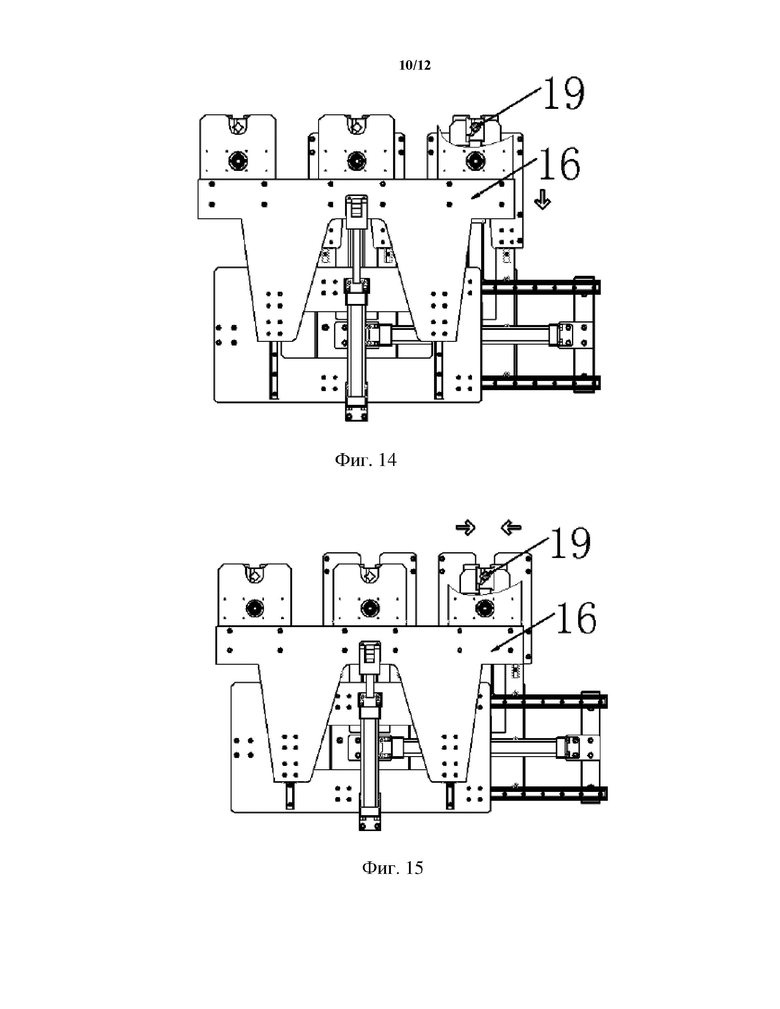
на фиг. 14 показана принципиальная схема конструкции в рабочем состоянии на пятом этапе согласно настоящему изобретению;
на фиг. 15 показана принципиальная схема конструкции в рабочем состоянии на шестом этапе согласно настоящему изобретению;
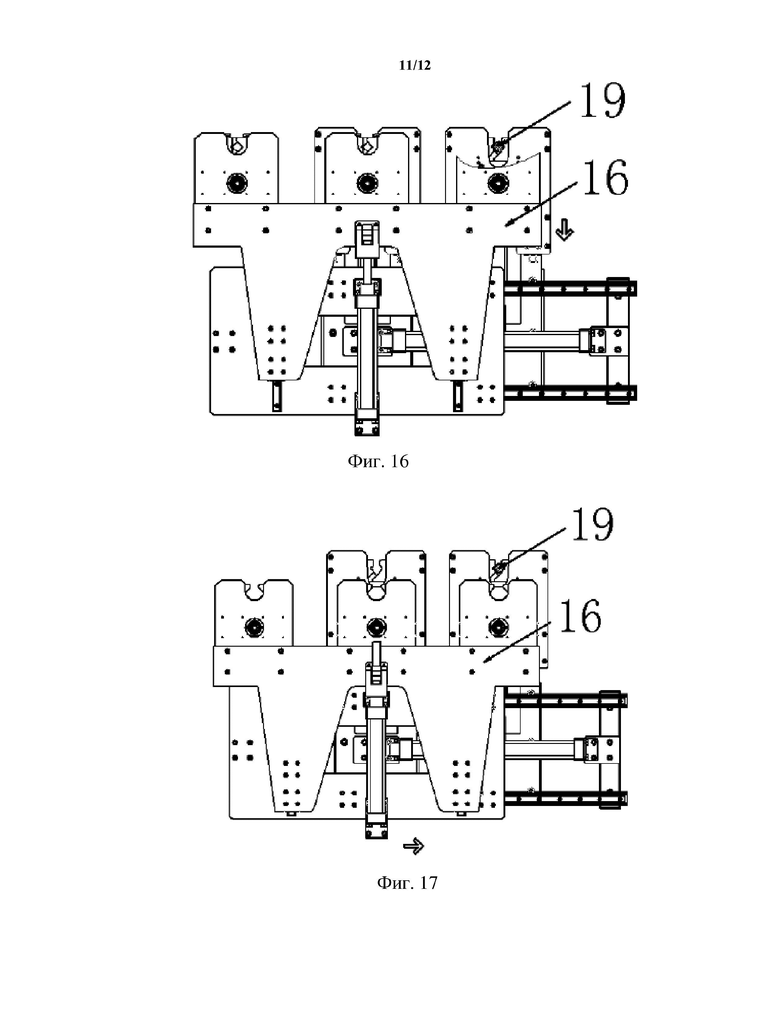
на фиг. 16 показана принципиальная схема конструкции в рабочем состоянии на седьмом этапе согласно настоящему изобретению;
на фиг. 17 показана принципиальная схема конструкции в рабочем состоянии на восьмом этапе согласно настоящему изобретению; и
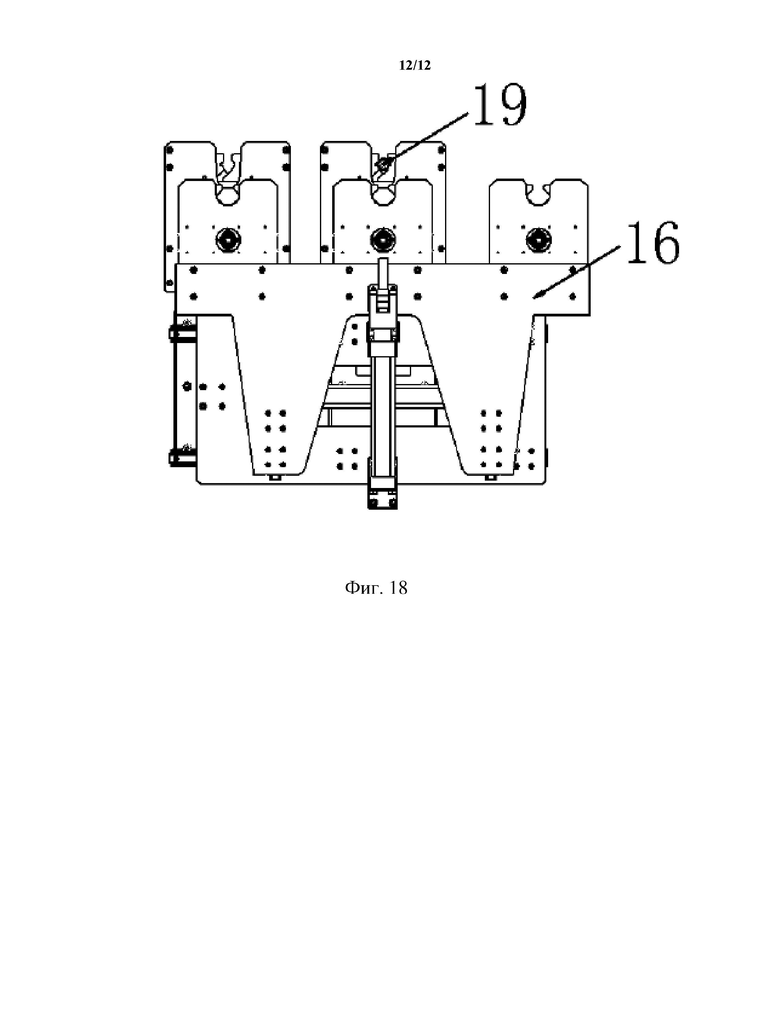
на фиг. 18 показана принципиальная схема конструкции в рабочем состоянии на девятом этапе согласно настоящему изобретению.
Подробное описание чертежей
На фиг. 1 показано, что поперечное шаговое конвейерное оборудование для перемещения стального стержня содержит основание 1. Передняя подвижная зажимная область 2 и задняя неподвижная зажимная область 3 расположены на основании 1 и соединены посредством соединительных рельсовых механизмов 4 задней неподвижной зажимной области для осуществления относительного поступательного движения.
Передняя подвижная зажимная область 2 содержит зажим 5 передней подвижной зажимной области, подвижную вправо-влево пластину 6 передней подвижной зажимной области и подвижную вверх-вниз пластину 7 передней подвижной зажимной области. Зажим 5 передней подвижной зажимной области неподвижно прикреплен к подвижной вверх-вниз пластине 7 передней подвижной зажимной области. Подвижная вправо-влево пластина 6 передней подвижной зажимной области установлена на обратной поверхности подвижной вверх-вниз пластины 7 передней подвижной зажимной области и прикреплена с возможностью перемещения к подвижной вверх-вниз пластине 7 передней подвижной зажимной области.
Задняя неподвижная зажимная область 3 содержит зажимное устройство 8 задней неподвижной зажимной области и неподвижную пластину 9 задней неподвижной зажимной области. Зажимное устройство 8 задней неподвижной зажимной области установлено на неподвижной пластине 9 задней неподвижной зажимной области. Зажимное устройство 8 задней неподвижной зажимной области содержит зажим 10 задней неподвижной зажимной области и зажимную направляющую пластину 11 задней неподвижной зажимной области (как показано на фиг. 2, фиг. 3 и фиг. 4).
Наклонный паз 14 расположен на зажимной направляющей пластине 11 задней неподвижной зажимной области. Зажим 10 задней неподвижной зажимной области вставлен в наклонный паз 14. Зажимное силовое устройство 12 задней неподвижной зажимной области зажимного устройства 8 задней неподвижной зажимной области поднимает зажимную направляющую пластину 9 задней неподвижной зажимной области для осуществления поперечного зажатия и разжатия зажима 10 задней неподвижной зажимной области вдоль наклонного паза 14 (как показано на фиг. 5).
Предоставлены 1, 2, 3, ..., n зажимные устройства 8 задней неподвижной зажимной области. Соответственно предоставлены 2, 3, 4, ..., n+1 зажимы 5 передней подвижной зажимной области. Зажимные устройства 8 задней неподвижной зажимной области и зажимы 5 передней подвижной зажимной области распределены на равном расстоянии в поперечном направлении. Зажимная направляющая пластина 9 задней неподвижной зажимной области содержит симметрично расположенные переднюю направляющую пластину и заднюю направляющую пластину.
Соединительные рельсовые механизмы 4 задней неподвижной зажимной области между передней подвижной зажимной областью 2 и задней неподвижной зажимной областью 3 соединены посредством поперечного рельса. Подвижная вправо-влево пластина 6 передней подвижной зажимной области и подвижная вверх-вниз пластина 7 передней подвижной зажимной области соединены посредством продольного рельса. Неподвижная пластина 9 задней неподвижной зажимной области и зажимная направляющая пластина 11 задней неподвижной зажимной области соединены посредством продольного рельса. Зажим 10 задней неподвижной зажимной области и неподвижная пластина 9 задней неподвижной зажимной области соединены посредством поперечного рельса.
Зажим 5 передней подвижной зажимной области осуществляет зажатие и разжатие за счет использования зажимного силового устройства 15 передней подвижной зажимной области.
Силовые устройства и зажимные устройства передней подвижной зажимной области 2 и задней неподвижной зажимной области 3 управляются ПЛК пневматическим, гидравлическим или электрическим способом.
На фиг. 9 показано, что в фактическом использовании оно содержит два поперечных устройства 16 для перемещения и крепления 17 для стального стержня. Два поперечных устройства 16 для перемещения расположены симметрично. Крепления 17 для стального стержня расположены между двумя поперечными устройствами 16 для перемещения. Стальной стержень 19 размещен в первоначальном положении за счет использования креплений 17 для стального стержня. Способ управления поперечным шаговым оборудованием для перемещения стального стержня включает следующие этапы:
Этап 1: на фиг. 10 показана схема, иллюстрирующая, что стальной стержень 17 размещен в первоначальном положении. Зажим 5 передней подвижной зажимной области расположен на нижнем конце стального стержня и находится в разомкнутом состоянии. Затем подвижная вверх-вниз пластина 7 передней подвижной зажимной области приводит зажим 5 передней подвижной зажимной области в действие для поднятия.
Этап 2: зажим 5 передней подвижной зажимной области поднимается в положение на одном уровне с зажимом 10 задней неподвижной зажимной области и затем выполняет зажимающее движение (как показано на фиг. 11). На фиг. 12 показан частичный вид в разрезе по фиг. 11. Зажим 5 передней подвижной зажимной области затем удерживает стальной стержень с совместным поднятием гидравлическим способом.
Этап 3: на фиг. 13 зажим 5 передней подвижной зажимной области удерживает стальной стержень 19, и их вместе поднимают в самое верхнее положение. Подвижная вправо-влево пластина 6 передней подвижной зажимной области приводит зажим 5 передней подвижной зажимной области и стальной стержень в действие для совместного перемещения влево.
Этап 4: на фиг. 14 зажим 5 передней подвижной зажимной области и стальной стержень 19 перемещают вместе влево. Подвижная вверх-вниз пластина 7 передней подвижной зажимной области затем приводит зажим 5 передней подвижной зажимной области и стальной стержень в действие для опускания.
Этап 5: на фиг. 15 зажим 5 передней подвижной зажимной области и стальной стержень 19 опускаются в открытое положение зажима 10 задней неподвижной зажимной области. Зажим 10 задней неподвижной зажимной области удерживает стальной стержень. Затем зажим 5 передней подвижной зажимной области высвобождает стальной стержень. На фиг. 16 показан частичный вид в разрезе по фиг. 15.
Этап 6: на фиг. 17 зажим 5 передней подвижной зажимной области опускается в самое нижнее положение. На фиг. 18 зажим 5 передней подвижной зажимной области движется вправо в первоначальное положение (т.е. в положение на фиг. 10).
Этап 7: этапы 1–6 повторяют до перемещения стального стержня в заданное положение.
Оборудование согласно настоящему изобретению применяют для поперечного перемещения стальных стержней разной длины, а также для пошагового перемещения других длинных материалов любого поперечного сечения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАЖИМНОЕ ПРИСПОСОБЛЕНИЕ И НАСТОЛЬНЫЙ КРУГЛОПИЛЬНЫЙ СТАНОК | 2009 |
|
RU2397862C1 |
| ЗАЖИМНОЙ ПАТРОН С ПРИЖИМНЫМИ РОЛИКАМИ | 2018 |
|
RU2731538C1 |
| Автомат для сварки тавровых соединений стержней | 1976 |
|
SU749596A1 |
| Клещевая подача для универсально-гибочных автоматов с приводом от центральной шестерни | 1987 |
|
SU1547916A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ФИКСАЦИИ ИЗДЕЛИЙ ПО ПОЗИЦИЯМ АВТОМАТИЧЕСКОЙ СТАНОЧНОЙ ЛИНИИ | 1969 |
|
SU251347A1 |
| Автомат для обработки электромонтажных проводов | 1990 |
|
SU1837371A1 |
| КОБУРА С ВОЗМОЖНОСТЬЮ БЛОКИРОВКИ И С МНОГОРАЗМЕРНЫМ РЕГУЛИРУЕМЫМ ПОЯСНЫМ КРЕПЛЕНИЕМ | 2007 |
|
RU2445569C2 |
| ПОДВЕСНОЙ АВТОМАТИЧЕСКИЙ ЗАХВАТНО-ЗАЖИМНОЙ ЛОВИТЕЛЬ | 2011 |
|
RU2474529C2 |
| ПОЛНОСТЬЮ АВТОМАТИЧЕСКАЯ МАШИНА ДЛЯ РАСКРЫТИЯ, УПАКОВКИ И ШТАБЕЛИРОВАНИЯ | 2021 |
|
RU2766124C1 |
| Автомат для стыковой сварки давлением цилиндрических стержней | 1987 |
|
SU1558607A1 |
Группа изобретений относится к конвейерному оборудованию для поперечного шагового перемещения стальных стержней разной длины любого поперечного сечения. Оно содержит основание, на котором расположены передняя подвижная и задняя неподвижная зажимные области, соединенные рельсовыми механизмами, и множество зажимных механизмов. Зажим передней подвижной зажимной области зажимает стальной стержень и пошагово перемещает его в следующее положение, затем зажим задней неподвижной зажимной области зажимает стальной стержень, зажим передней подвижной зажимной области разжимается и возвращается в первоначальное положение до перемещения стального стержня в заданное положение. Обеспечивается упрощение конструкции и легкость эксплуатации, повышается точность перемещения стальных стержней. 2 н. и 6 з.п. ф-лы, 18 ил.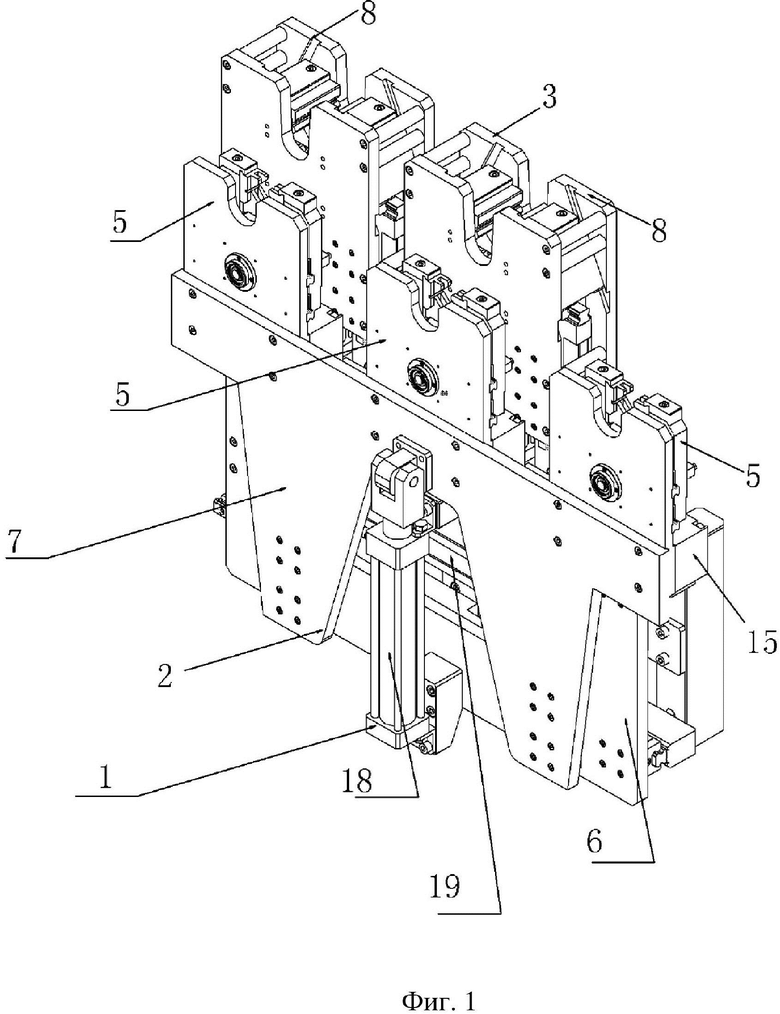
1. Конвейерное оборудование для поперечного шагового перемещения стального стержня, содержащее основание (1), при этом передняя подвижная зажимная область (2) и задняя неподвижная зажимная область (3) расположены на основании (1) и соединены посредством соединительных рельсовых механизмов (4) задней неподвижной зажимной области для осуществления относительного поступательного движения;
при этом передняя подвижная зажимная область (2) содержит зажим (5) передней подвижной зажимной области, подвижную вправо-влево пластину (6) передней подвижной зажимной области и подвижную вверх-вниз пластину (7) передней подвижной зажимной области, причем зажим (5) передней подвижной зажимной области неподвижно прикреплен к подвижной вверх-вниз пластине (7) передней подвижной зажимной области, и при этом подвижная вправо-влево пластина (6) передней подвижной зажимной области установлена на обратной поверхности подвижной вверх-вниз пластины (7) передней подвижной зажимной области и прикреплена с возможностью перемещения к подвижной вверх-вниз пластине (7) передней подвижной зажимной области; и
при этом задняя неподвижная зажимная область (3) содержит зажимное устройство (8) задней неподвижной зажимной области и неподвижную пластину (9) задней неподвижной зажимной области, причем зажимное устройство (8) задней неподвижной зажимной области установлено на неподвижной пластине (9) задней неподвижной зажимной области, и при этом зажимное устройство (8) задней неподвижной зажимной области содержит зажим (10) задней неподвижной зажимной области и зажимную направляющую пластину (11) задней неподвижной зажимной области.
2. Конвейерное оборудование для поперечного шагового перемещения стального стержня по п. 1, отличающееся тем, что наклонный паз (14) расположен на зажимной направляющей пластине (11) задней неподвижной зажимной области, при этом зажим (10) задней неподвижной зажимной области вставлен в наклонный паз (14), и при этом зажимное силовое устройство (12) задней неподвижной зажимной области зажимного устройства (8) задней неподвижной зажимной области выполнено с возможностью подъема зажимной направляющей пластины (11) задней неподвижной зажимной области для осуществления поперечного зажатия и разжатия зажима (10) задней неподвижной зажимной области вдоль наклонного паза (14).
3. Конвейерное оборудование для поперечного шагового перемещения стального стержня по п. 1 или 2, отличающееся тем, что предоставлены 1, 2, 3, ..., n зажимных устройств (8) задней неподвижной зажимной области, соответственно предоставлены 2, 3, 4, ..., n+1 зажимов (5) передней подвижной зажимной области, и при этом зажимные устройства (8) задней неподвижной зажимной области и зажимы (5) передней подвижной зажимной области распределены на равном расстоянии в поперечном направлении.
4. Конвейерное оборудование для поперечного шагового перемещения стального стержня по п. 1 или 2, отличающееся тем, что зажимная направляющая пластина (9) задней неподвижной зажимной области содержит симметрично расположенные переднюю направляющую пластину и заднюю направляющую пластину.
5. Конвейерное оборудование для поперечного шагового перемещения стального стержня по п. 1, отличающееся тем, что соединительные рельсовые механизмы (4) задней неподвижной зажимной области между передней подвижной зажимной областью (2) и задней неподвижной зажимной областью (3) соединены посредством поперечного рельса; при этом подвижная вправо-влево пластина (6) передней подвижной зажимной области и подвижная вверх-вниз пластина (7) передней подвижной зажимной области соединены посредством продольного рельса; при этом неподвижная пластина (9) задней неподвижной зажимной области и зажимная направляющая пластина (11) задней неподвижной зажимной области соединены посредством продольного рельса; и при этом зажим (10) задней неподвижной зажимной области и неподвижная пластина (9) задней неподвижной зажимной области соединены посредством поперечного рельса.
6. Конвейерное оборудование для поперечного шагового перемещения стального стержня по п. 1, отличающееся тем, что зажим (5) передней подвижной зажимной области выполнен с возможностью осуществления зажатия и разжатия за счет использования зажимного силового устройства (15) передней подвижной зажимной области.
7. Конвейерное оборудование для поперечного шагового перемещения стального стержня по п. 1, отличающееся тем, что силовые устройства и зажимные устройства передней подвижной зажимной области (2) и задней неподвижной зажимной области (3) выполнены с возможностью управления посредством программируемого логического контроллера (ПЛК) пневматическим, гидравлическим или электрическим способом.
8. Способ управления поперечным шаговым перемещением стального стержня с использованием конвейерного оборудования по одному из пп. 1-7, включающий следующие этапы:
(1) этап 1: расположение зажима (5) передней подвижной зажимной области на нижнем конце стального стержня и обеспечение его разомкнутого состояния и затем приведение в действие подвижной вверх-вниз пластиной (7) передней подвижной зажимной области зажима (5) передней подвижной зажимной области с поднятием;
(2) этап 2: поднятие зажима (5) передней подвижной зажимной области в положение на одном уровне с зажимом (10) задней неподвижной зажимной области и затем выполнение им зажимающего движения, а затем удерживание зажимом (5) передней подвижной зажимной области стального стержня с совместным поднятием;
(3) этап 3: удерживание стального стержня зажимом (5) передней подвижной зажимной области, затем их совместное поднятие в самое верхнее положение и приведение в действие подвижной вправо-влево пластиной (6) передней подвижной зажимной области зажима (5) передней подвижной зажимной области и стального стержня с совместным перемещением влево;
(4) этап 4: совместное перемещение влево зажима (5) передней подвижной зажимной области и стального стержня и затем приведение в действие подвижной вверх-вниз пластиной (7) передней подвижной зажимной области зажима (5) передней подвижной зажимной области и стального стержня с опусканием;
(5) этап 5: опускание зажима (5) передней подвижной зажимной области и стального стержня в открытое положение зажима (10) задней неподвижной зажимной области, при этом зажим (10) задней неподвижной зажимной области удерживает стальной стержень и затем высвобождение стального стержня зажимом (5) передней подвижной зажимной области;
(6) этап 6: опускание зажима (5) передней подвижной зажимной области в самое нижнее положение и движение зажима (5) передней подвижной зажимной области вправо в первоначальное положение; и
(7) этап 7: повторение этапов 1-6 до перемещения стального стержня в заданное положение.
| EP 562837 A1, 29.09.1993 | |||
| US 4681210 A1, 21.07.1987 | |||
| Устройство для подачи и поддержания пруткового материала в станках-автоматах | 1984 |
|
SU1180162A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ И РЕЗКИ ПРОВОЛОКИ, ПРУТКОВ, ЛЕНТЫ И ДРУГИХ ПОДОБНЫХ МАТЕРИАЛОВ | 2003 |
|
RU2253531C1 |

