Предлагаемое изобретение относится к области термосиловой обработки (ТСО) длинномерных осесимметричных деталей типа «вал» и может быть использовано, в технологических процессах изготовления маложестких валов в механообрабатывающих цехах.
Известно устройство для ТСО валов малой жесткости, содержащее стапель с захватами в концевых сечениях, причем стапель выполнен в виде труб из металла с коэффициентом линейного расширения большим, чем у изделия [1].
Близким способом к заявляемому изобретению, выбранному в качестве прототипа, является способ термосиловой обработки осесимметричных деталей, включающий динамическое силовое воздействие в «n» равных участках, разделенных поперечными радиальными канавками, по которым захватами фиксируют выбранные участки, предварительно нагревают до температуры отпуска, выдерживают, деформируют с помощью силового гидравлического привода и затем разгружают с постоянной нагрузкой до температуры окружающей среды, а затем фиксируют [2].
Недостатком данного способа является сложная конструкция силового гидропривода, влияние веса заготовки и установки в вертикальном подвешенном положении на деформацию в зоне нагрева, а следовательно, создание неравномерного остаточного напряжения по длине заготовки. Деформация участков заготовки в противоположных направлениях без учета величины пластичных деформаций нарушает равномерность распределения остаточных напряжений по длине участка заготовки в целом. Неконтролируемая кривизна, оси заготовки не позволяет правильно выбрать алгоритм термосиловой обработки длинномерных деталей.
Наиболее близким способом к заявленному изобретению, выбранному в качестве прототипа является способ термосиловой обработки осесимметричных деталей включающий разделение детали на участки по длине и последовательно обработанных путем температурного и силового воздействия. В процессе силового воздействия контролируют величину осевой упруго-пластической деформации в двух зонах участка детали и устраняют неравенство этих величин в указанных зонах путем увеличения давления. Силовое воздействие на каждый участок осуществляют путем его растяжения в противоположные стороны посредством гидросилового привода осевой деформации [3].
Недостатком данного способа является ручная подача детали в зону обработки гидросилового привода. Низкая производительность механической обработки выступов заготовки неравномерная деформация в зоне захвата, сложность в изменении расстояния зоны пластической деформации и жесткая привязка к расстояниям между выступами на поверхности заготовки, отсутствие контроля и величины пластической деформации во время разгрузки.
Задача, на решение которой направлено заявляемое изобретение, заключается в повышении качества изготовления заготовок маложестких осесимметричных деталей с достижением следующих результатов: повышение стабильности размеров и формы длинномерных маложестких осесимметричных деталей за счет устранения несовместности упругих осевых остаточных деформаций при разгрузке, которая проходит по линейному закону; уничтожение технологической наследственности за счет полной перестройки текстуры материала при разнонаправленности приложенных внешних сил растяжения-сжатия зон деформированных участков детали; устранение несовместности пластической деформации при разгрузке, что исключает остаточные деформации на весь период эксплуатации готовой детали; устранение влияния осевых внешних сил за счет не закрепленных концов детали и, как следствие, устранение влияния напряжений от одной зоны деформации к другой на всей длине детали; устранение влияния зон жестких захватов на направленность осевых остаточных напряжений за счет резьбовых колец, вмонтированных в захватах и образующих зоны прерывистых пластических деформаций в этих зонах.
Данная задача решается за счет того, что в способ термосиловой обработки осесимметричных деталей включают нарезку резьбы на ее поверхности на всей длине и укладку на горизонтальный роликовый транспортер. Посредством управляемого червячного привода осевых перемещений автоматически ввинчивают в полый цилиндр штока гидросилового привода через винтовые захваты, далее участок между захватами нагревают до температуры отпуска в зоне слабой зависимости предела прочности от температуры нагрева и прикладывают осевые усилия растяжения к обоим концам участков в противоположные стороны с помощью автоматической системы управления на величину пластической деформации равную 0.8-1% с помощью системы автоматического управления. Контролируют величину заданной пластической деформации с учетом температурного расширения и при достижении заданной величины производят выстой, согласно регламенту отпуска. Далее измеряют величину пластической деформации и отключают источник нагрева и производят разгрузку, путем снижения осевых растягивающих сил в каждом участке пропорционально скорости снижения температуры охлаждения до температуры окружающей среды. Далее измеряют величины упругих остаточных деформаций в обоих деформированных участков детали и сравнивают их с упругой деформацией до разгрузки. При их несовместности-неравенстве проводят догрузку с приложением усилий сжатия. Цикл нагрузки-разгрузки повторяют начиная с величины усилия недогрузки. При равенстве упругих остаточных деформаций и упругих деформаций до разгрузки в каждом участке процесс деформации останавливают и далее последовательно по тому же алгоритму деформируют деталь по всей длине.
Устройство для термосиловой обработки включает в себя систему автоматического управления, которая содержит два датчика линейных перемещений, включенных в обратную связь контура управления величинами пластической деформации участков, а также два независимо работающих гидросиловых привода осевой деформации, кроме того, система управления выполнена с возможностью управления рабочего давления в камерах силовых цилиндров с помощью управляемых дросселей, охваченных обратными связями датчиками давления и диагностики температуры нагрева участка обрабатываемой детали, имеющей в обратной связи датчик температуры (пирометр, термопары). Система управления содержит два контура: первый контур включает в себя два канала управления осевой пластической деформации участка заготовки, второй управление температурой нагрева зоны обрабатываемой детали, при этом каждый контур управления содержит датчики контроля осевой деформации и температуры, включенных в контуры обратной связи блока управления.
Кроме того, устройство для осевой деформации детали содержит горизонтальный роликовый транспортер для расположения детали, управляемый привод осевой подачи, включающий в себя реверсный электропривод, червячный редуктор, в ступицу червячного колеса которого вмонтирован пустотелый вал с внутренней резьбой и на его внешнем диаметре смонтирована призматическая направляющая шпонка, позволяющая обрабатываемой детали свободно перемещаться при температурно-силовом воздействие. Гидросиловой привод оснащен с двух сторон захватами, закрепленными на торцах подвижных штоках гидросилового привода. В корпусах захватов встроены цилиндрические кольца с внутренней резьбой, в которые ввинчивается деталь, а дистанционные кольца имеют толщину равную десяти ниткам резьбы и используются при реверсе осевых деформаций. Количество колец определяют в функции прочности материала детали.
Нагрев деформационных участков детали снижает предел прочности материала обрабатываемой детали и снижает величину силового воздействия, что способствует минимизации мощности и габаритов силового привода, а также способствует уменьшению габаритов корпуса установки.
Одновременный нагрев и знакопеременное пластическое осевое деформирование формирует однородную структуру материала детали.
Контроль и управление температурного воздействия является эффективным средством в зоне слабой зависимости предела напряжения упругости от деформации стабилизации и минимизации остаточных напряжений.
Выбор конструкции захватов для осевого деформирования в виде съемных корпусов позволяет фиксировать участки деформации детали в широком диапазоне и выравнивать напряжения в зоне захвата.
Фиксирование детали на роликовом транспортере позволяет автоматически перемещать деталь и вводить ее в гидросиловой привод через управляемой червячный привод с встроенным в ступицу червячного колеса пустотелый вал внутри которого нарезана резьба и закреплена направляющая шпонка для передачи крутящего момента и перемещения детали вдоль своей оси, что позволяет детали при осевой деформации и нагреве свободно перемещаться, не создавая дополнительные усилия сжатия от опор.
Система автоматического контроля величины деформирования с учетом разности перемещения захватов, упруго-пластической деформации левой и правой зоны позволяет автоматически выравнивать деформацию обоих зон, а следовательно, обеспечивает равномерность пластической деформации как обрабатываемого участка, так и всей заготовки по длине.
Система автоматического управления позволяет управлять и контролировать процесс нагрузки и разгрузки по температуре, внешними силами и величинами остаточных упругих деформаций, что обеспечивает совместность упругих деформаций.
Система управления повышает эффективность обработки за счет оперативного регулирования значениями технологических параметров в функции процесса деформирования.
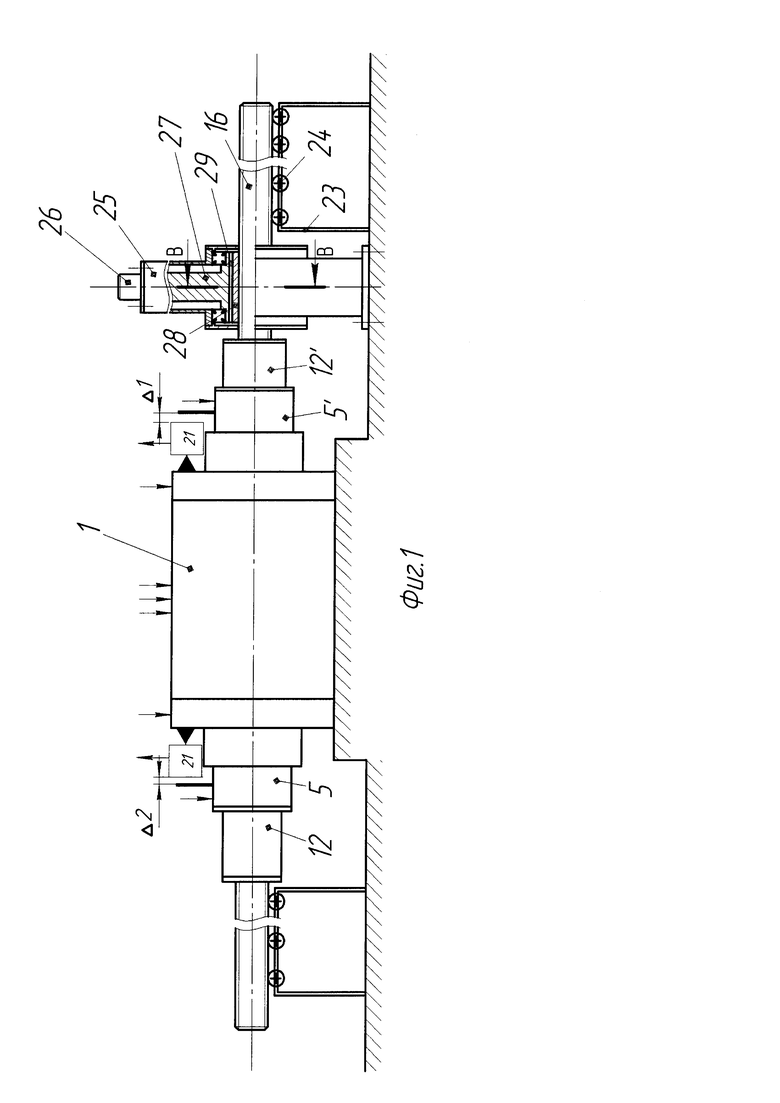
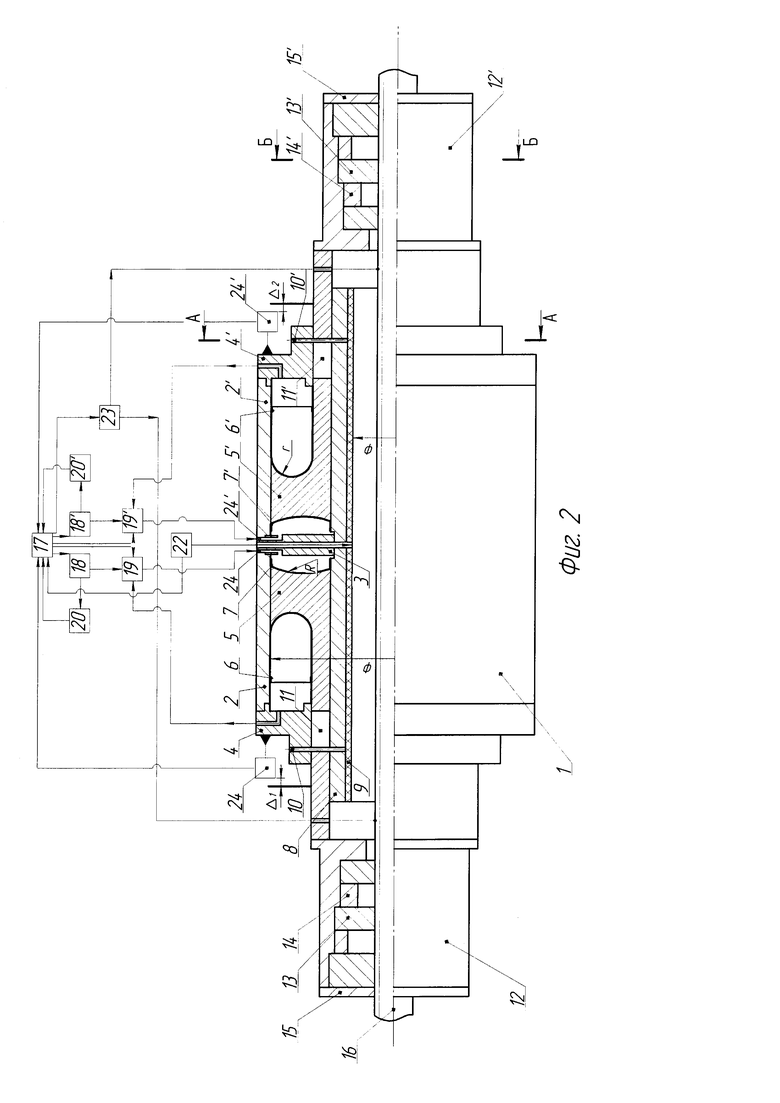
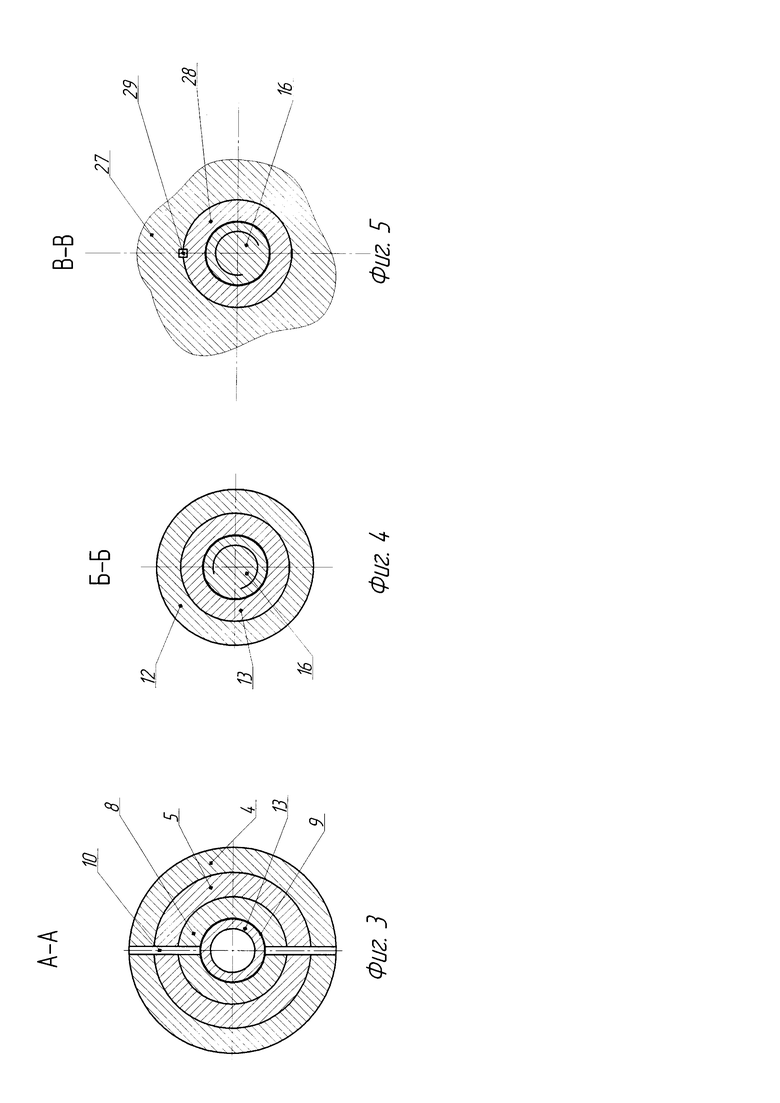
Предлагаемое изобретение иллюстрировано чертежами, представленными на фиг. 1-5.
На фиг. 1 приведен общий вид устройства. На фиг. 2 показан общий вид гидросилового привода в разрезе и функциональная схема автоматического управления термосиловой обработки. На фиг. 3-5 показаны соответственно сечения А-А, Б-Б и В-В.
Способ осуществляется следующим образом: деталь обрабатывают на токарном станке в самоцентрирующихся люнетах (это позволяет совместить конструкторскую и технологическую базу), что повышает точность заготовки детали и устраняет эксцентриситет, а при растяжении-сжатии не создает изгибающий момент. Далее на детали нарезают резьбу на всю длину и укладывают на роликовой транспортер и посредством управляемого червячного привода осевых перемещений автоматически ввинчивают ее в полый цилиндр штока гиросилового привода через винтовые захваты гидросилового привода. Перед этим резьбу детали и резьбу втулок смазывают графитной смазкой. Захваты выполнены в виде корпуса, в котором вмонтированы резьбовые кольца и дистанционные кольца для реверсного перемещения захватов.
После чего участок между захватами нагревают до температуры отпуска путем подключения к источнику постоянного тока, что обеспечивает равномерность нагрева заготовки по сечению. Нагрев и охлаждение осуществляются автоматически и контролируются датчиком температуры, включенным в обратную связь контура управления. Далее прикладывают осевые усилия растяжения к концам участков в противоположные стороны с помощью автоматической системы управления на величину пластической деформации равную 0.8-1% и контролируют величину заданной пластической деформации с учетом температурного расширения и при ее достижении проводят выстой, согласно регламенту отпуска. Далее отключают источник нагрева, и проводят разгрузку путем снижения осевых растягивающих сил в каждом участке пропорционально скорости снижения температуры охлаждения до температуры окружающей среды. Затем измеряют величины упругих остаточных деформаций в обоих деформированных участках и сравнивают их с упругой деформацией до разгрузки и при их несовместности-неравенстве проводят догрузку с приложением усилий сжатия. Цикл нагрузки-разгрузки повторяют с величины усилия недогрузки. При равенстве упругих остаточных деформаций и упругих деформаций до разгрузки в каждом участке процесс деформации останавливают и далее последовательно по тому же алгоритму деформируют деталь по всей длине.
Устройство для реализации способа термосиловой отработки длинномерных осесимметричных деталей фиг. 2 содержит корпус 1, выполненный сборным в виде двух цилиндров 2 и 21, разделенных жестким кольцом 3, крышек 4 и 41, двух полых шток-поршней 5 и 51, камеры которых 6, 61 и 7, 71 изолированы с обеих сторон эластичными уплотнителями.
Во внутренние отверстия шток-поршней 5 и 51 вмонтирован цилиндр 8, на наружной поверхности которого смонтировано разделяющее две силовые камеры кольцо 3, а на внутренней поверхности закреплен теплоизолятор 9. Цилиндр 8 зафиксирован относительно крышек 4 и 41 штифтами 10 для ограничения хода шток-поршней 5 и 51, в штоках выполнены пазы 11, а на торцах шток-поршней 5 и 51 крепятся захваты 12 и 121, последние крепятся к торцам подвижных шток-поршней 5 и 51, кольца с внутренней резьбой 13 и 131 фиксируют деформационный участок детали. Реверсные кольца 14-141 (толщина которых равна 10 ниток резьбы) обеспечивают реверс силовой деформации. Крышки 15-151 корпусов 12-121 осуществляют силовое замыкание колец. Система автоматического управления включает в себя три контура и состоит из блока управления 17, два выхода которого подключены к входам двух идентичных каналов, состоящих из двух последовательно включенных блоков 18 и 181 и 19 и 191. Блоки 18 и 181 - управляемые дроссели, на один из выходов которых подключены на вход датчики давления 20 и 201 в обратную связь блока управления 17. Блоки 19 и 191 - электрогидропреобразователи, на один из входов которых подключены выходы блока управления. 17, на вход которого подключены выходы датчиков линейных перемещений 21 и 211. Последние закреплены на крышках 4 и 41 с зазорами Δ1 и Δ2 относительно подвижных шток-поршней 5 и 51. Выход с блоков 19 и 191 соединен с камерами гидросилового цилиндра, торцы шток-поршней которых выполнены в виде сектора окружности радиусов R, а вторые камеры, работающие на разгрузку, выполнены с сектором радиусом r. Рабочее давление подается в силовые камеры через отверстия 24 и 241. Третий контур системы автоматического управления включает в себя блок управления 17, один из выходов которого подключен к входу блока питания постоянного тока 23, а выходы которого подключены к заготовке с помощью зажимов, а в обратную связь контура включен датчик температуры 22, установленный на корпусе 1.
Устройство для термосиловой обработки длинномерных осесимметричных деталей типа «вал» работает следующим образом. Заготовку 16 до термосиловой обработки обтачивают на токарном станке с помощью самоцентрирующих люнетов и нарезают резьбу. Далее укладывают на ролики 24 транспортера 23 и вводят в зацепление с захватами 12 и 121 гидросилового привода 1. Количество резьбовых колец 13, 131 и длину деформации зоны обработки рассчитывают в функции коэффициента технологической жесткости детали (K=1/d=5-8) и прочностных свойств материла.
Далее, согласно алгоритму системы автоматического управления, включается третий контур управления нагревом и охлаждением выбранного участка детали. Выходной сигнал согласно алгоритму с блока управления 17 подается на источник постоянного тока 23. Выходной сигнал с источника 23 через клеммы (на фиг. 2 показаны условно) соединен с заготовкой 16 в зоне захвата деформационного участка детали. Нагрев участка контролируется датчиком температуры 22 (например, пирометром), выход которого включен в обратную связь контура управления температурой нагрева и охлаждения. Нагрев проводится в режиме отпуска согласно технологии термической обработки выбранного материала. Нагрев участка детали осуществляется до зоны температур со слабой зависимостью усилия от деформации. Далее следует выдержка согласно технологии термообработки отпуска и включается второй контур управления упруго-пластической деформации. Блок 17 выдает сигнал управления на редукторы 18 и 181, давление в которых передается от насосной станции, которая не показана на фиг. 2. Давление устанавливают заранее в функции физико-механических свойств деформируемого материала. Контроль за рабочим давлением устанавливают с помощью датчиков давления 20 и 201, включенных в обратную связь каналов управления давлением. Далее с двух других выходов блока 17 сигналы управления поступают на входы электрогидропреобразователей 19 и 191, а выходы последних соединены с рабочими полостями гидропривода через отверстия 24 и 241 и при подаче рабочего давления центральные полости цилиндра шток-поршня расходятся в разные стороны, создавая растягивающую деформацию материала участка заготовки с помощью захватов 12 и 121. Величины деформаций зон обрабатываемого участка контролируются двумя датчиками линейных перемещений 21 и 211, закрепленных на неподвижных крышках 4 и 41 корпуса 2 относительно стоек, закрепленных на шток-поршнях 5 и 51 и установленных с зазорами Δ1 и Δ2. Электрогидропреобразователи 19 и 191 перераспределяют давление рабочей жидкости в камерах гидроцилиндров, и при охлаждении обрабатываемых участков рабочее давление поступает в крайние камеры (разгрузки), а в центральных камерах происходит сброс давлений, что позволяет провести процесс сброса нагрузок в обрабатываемых зонах участка управляемым. После деформации всей детали включают реверс червячного привода и перемещают ее в исходное положение.
Источники информации:
1. Патент РФ №2260628, кл. С21Д 9/06, 2005 г.
2. Патент РФ №2575510, кл. C21D 8/00, C21D 7/13, 2016 г.
3. Патент РФ №2645235, кл. C21D 8/00, C21D 7/13, 2018 г.
Изобретение относится к области обработки металлов давлением и может быть использовано при изготовлении деталей типа вал. Для повышения качества детали за счет снижения остаточных напряжений на поверхности обрабатываемой детали нарезают резьбу и укладывают на горизонтальный роликовый транспортер, с помощью управляемого червячного редуктора через пустотелый вал его колеса ввинчивают деталь в гидросиловой привод, нагревают участок детали до температуры отпуска и прикладывают силовое воздействие посредством гидросилового привода осевой деформации на заданную величину пластической деформации и контролируют величину пластической деформации с учетом коэффициента температурного расширения детали и при ее достижении осуществляют выдержку при температуре отпуска, затем охлаждают деталь и проводят разгрузку путем снижения осевых растягивающих сил в каждом участке пропорционально скорости снижения температуры охлаждения до температуры окружающей среды, измеряют величину упругой остаточной деформации и сравнивают её с заданной величиной деформации задатчика и при несовпадении цикл нагрузки-разгрузки повторяют и начинают с величины усилия недогрузки, повторно нагревают до температуры отпуска и проводят доразгрузку данного участка с приложением усилия сжатия до равенства заданной и текущей величины деформации и при их равенстве процесс деформации останавливают. 2 н.п. ф-лы, 5 ил.
1. Способ термосиловой обработки осесимметричной детали типа вал, включающий последовательную обработку участков путем температурного и силового воздействия на каждый из них, при этом силовое воздействие на каждый участок детали осуществляют путем его растяжения в противоположные стороны посредством гидросилового привода осевой деформации и производят регулирование температурного воздействия, а в процессе силового воздействия на участок детали контролируют величину осевой пластической деформации в двух зонах участка детали и устраняют неравенство величин пластической деформации в указанных зонах путем увеличения давления гидросилового привода осевой деформации, отличающийся тем, что на поверхности детали нарезают резьбу по всей ее длине, фиксируют деталь в горизонтальном положении с помощью роликового транспортера и посредством управляемого червячного привода осевых перемещений автоматически ввинчивают в полый цилиндр штока гидросилового привода через винтовые захваты, далее участок между захватами нагревают до температуры отпуска и прикладывают осевые усилия растяжения к обоим концам участка в противоположные стороны на заданную величину с помощью автоматической системы управления и контролируют величину заданной пластической деформации с учетом коэффициента температурного расширения детали и при ее достижении осуществляют выдержку при температуре отпуска, затем охлаждают деталь и проводят разгрузку путем снижения осевых растягивающих сил в каждом участке пропорционально скорости снижения температуры охлаждения до температуры окружающей среды, измеряют величину упругой остаточной деформации, сравнивают её с заданной величиной деформации задатчика и при несовпадении цикл нагрузки-разгрузки повторяют, который начинают с величины усилия недогрузки, повторно нагревают до температуры отпуска, проводят доразгрузку данного участка с приложением усилия сжатия до равенства заданной и текущей величин деформации и при их равенстве процесс деформации останавливают.
2. Устройство для термосиловой обработки осесимметричных деталей типа вал, содержащее гидросиловой привод осевой деформации с подвижными шток-поршнями и полым цилиндром, источник постоянного тока с клеммами для подключения к нему деформированного участка детали и автоматическую систему управления с контурами управления упругопластической деформацией нагревом и охлаждением участка, отличающееся тем, что оно снабжено горизонтальным роликовым транспортером и управляемым приводом осевой подачи детали, выполненным в виде реверсного электропривода, червячного редуктора, в ступицу червячного колеса которого вмонтирован пустотелый вал с внутренней резьбой, а на его внешнем диаметре смонтирована призматическая направляющая шпонка, при этом гидросиловой привод осевой деформации оснащен с двух сторон винтовыми захватами, жестко закрепленными на торцах подвижных шток-поршней гидросилового привода, внутри которых вмонтированы съемные кольца с внутренней резьбой.
| Способ термосиловой обработки длинномерных осесимметричных деталей и устройство для его осуществления | 2016 |
|
RU2645235C1 |
| СПОСОБ ТЕРМОСИЛОВОЙ ОБРАБОТКИ ДЛИННОМЕРНЫХ ОСЕСИММЕТРИЧНЫХ ДЕТАЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2552206C2 |
| Устройство для термосиловой правки валов | 2017 |
|
RU2653520C1 |
| Способ термосиловой обработки длинномерных осесимметричных деталей и устройство для его осуществления | 2015 |
|
RU2615852C2 |

