Изобретение относится к медицинской технике, в частности, к приспособлениям, помогающим ходьбе в заранее предопределенных режимах движения экзоскелета пользователей с нарушением функций опорно-двигательного аппарата и может быть использовано для проведения испытаний экзоскелета.
Известные из уровня техники методы и способы тестирования, исследования и испытания экзоскелета, а также устройства для их реализации (US 8920347 В2, US 20160007885 А1), предполагают в том числе, воспроизведение всех возможных действий экзоскелета пилотом - испытателем или антропоморфным тестовым устройством как непосредственно в экзоскелете, так и с использованием беговой дорожки (тредмилла).
Недостатком упомянутых методов и способов следует считать субъективность проведения испытаний, зависящих от траекторий движения пилота - испытателя, а также ограничения в возможностях реализации некоторых движений, которые осуществляет пациент в экзоскелете в процессе тренировок, в частности, поворотов.
Наиболее близким по существу к предлагаемому изобретению, принятым за прототип, является способ проведения испытаний экзоскелета (см. патент US 20040097330 А1), в котором максимально возможные траектории движения экзоскелета, необходимые для реабилитационного процесса конкретного пациента, достигаются путем редактирования первичных траекторий, полученных при испытаниях экзоскелета, нагруженного антропоморфным тестовым устройством с использованием тредмилла.
Недостатком упомянутого способа следует считать ограниченность получения первичных траекторий, так как подвеска антропоморфного устройства искажает значения весовых нагрузок, возникающих в процессе передвижений экзоскелета. Кроме того, использование тредмилла ограничивает возможность
реализации некоторых движений экзоскелета, например, поворотов в движении.
Технической задачей, на решение которой направлено предложенное изобретение, является повышение качества и достижение большей достоверности тестируемых параметров, а также упрощение процесса испытаний.
Техническая задача достигается за счет того, что испытания экзоскелета проводятся на технологическом комплексе электромеханического экзоскелета, который обеспечивает максимальное воспроизведение возможных действий экзоскелета, при этом испытания экзоскелета проводятся без участия пилота, с использованием антропоморфного тестового устройства.
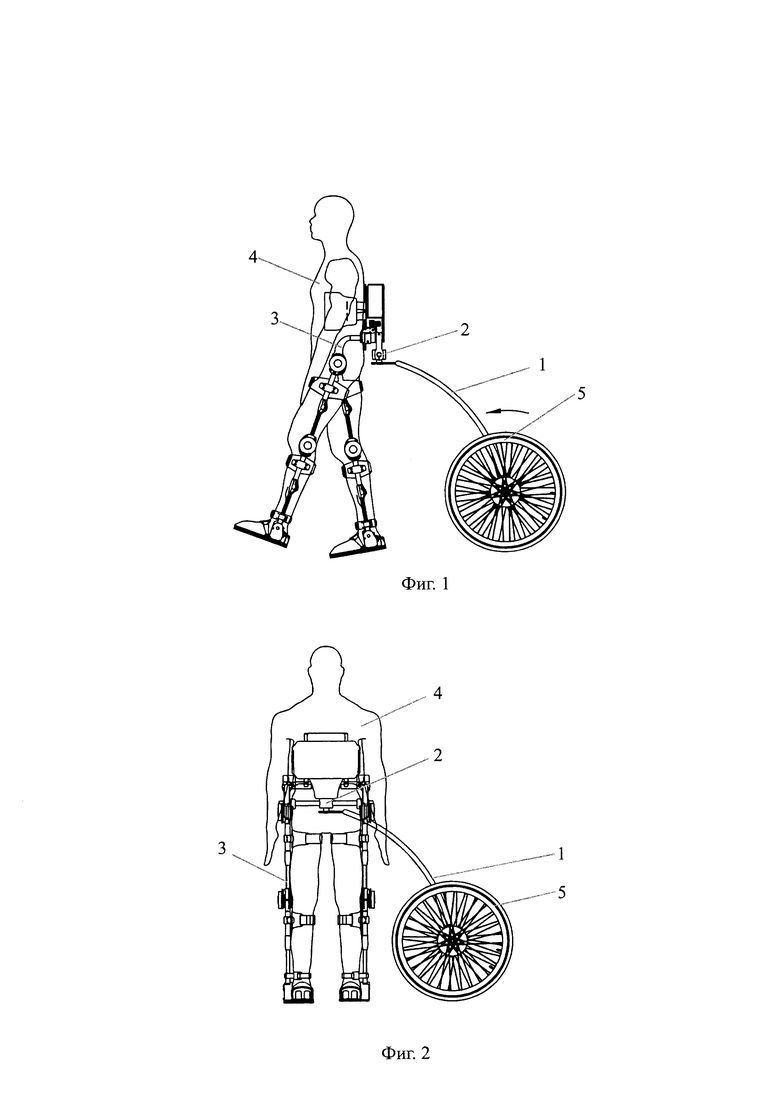
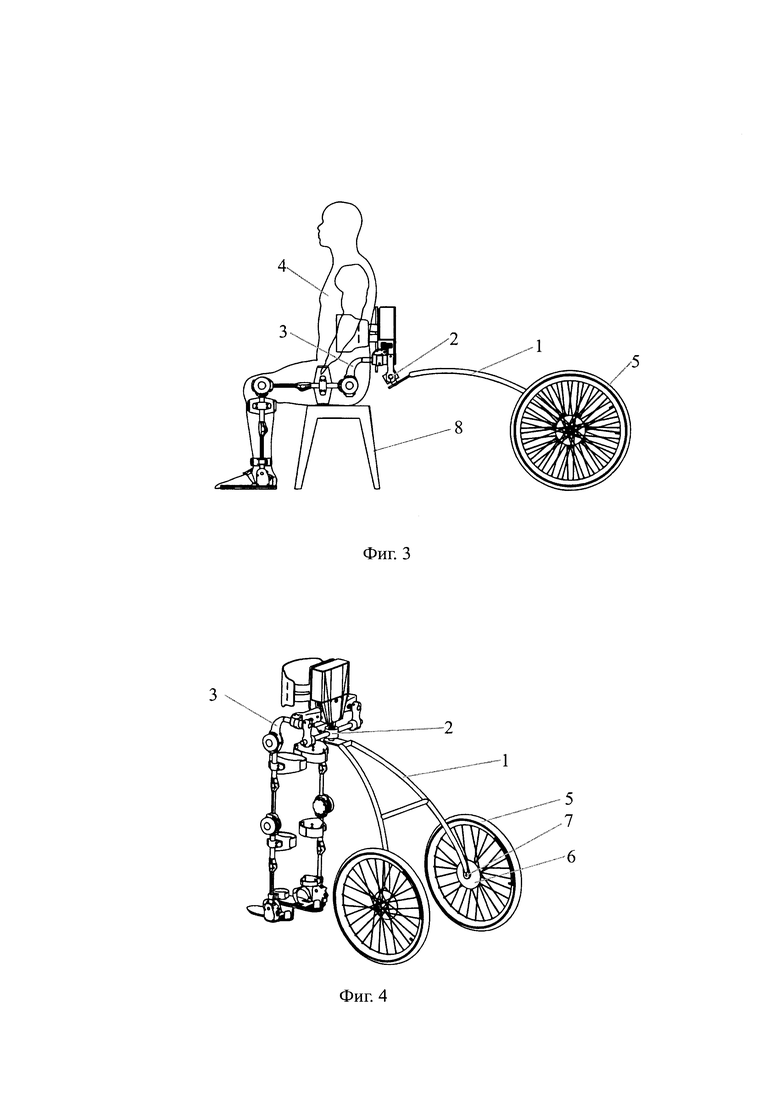
Сущность изобретения поясняется рисунками, где: на фиг. 1 изображен технологический комплекс при ходьбе, вид сбоку; на фиг. 2 - технологический комплекс в положении поворота; на фиг. 3 - технологический комплекс в положении сидя; на фиг. 4 - технологический комплекс без антропоморфного тестового устройства, вид общий.
Технологический комплекс для проведения испытаний представляет собой двухколесную тележку 1, сцепленную через шарнирный узел 2 с экзоскелетом 3, включающим в себя антропоморфное тестовое устройство 4. При этом, шарнирный узел 2 имеет три степени подвижности: вокруг вертикальной оси, во фронтальной и в сагиттальной плоскостях экзоскелета 3. Причем, две степени подвижности во фронтальной и сагиттальной плоскостях имеют упругую податливость. Колеса 5 тележки 1 содержат дисковые тормоза 6 и датчики скорости 7. Нагрузка на экзоскелет 3 обеспечивается прикреплением антропоморфного тестового устройства 4, с массой, соответствующей массе пациента. На раме тележки 1 может быть установлена дополнительная аккумуляторная батарея для непрерывности длительного тестирования нагрузочной
способности экзоскелета 3. Для проведения тестирования процесса приседания используется подставной стул 8.
Процесс тестирования экзоскелета с использованием технологического комплекса осуществляется следующим образом. Экзоскелет 3 крепится к шарнирному узлу 2, при этом двухколесная схема тележки 1 обеспечивает возможность сцепки с экзоскелетами разных размеров по высоте. Основное предназначение тележки 1 - это обеспечение повышенной устойчивости экзоскелета при самостоятельном движении в процессе тестирования. Процесс тестирования осуществляется во время самостоятельного движения экзоскелета, при этом воспроизводятся все виды движений, свойственные экзоскелету. Три степени подвижности шарнирного узла 2 обеспечивают возможность передвижения экзоскелета, маневрирования, в том числе поворачивания, а также приседания и вставания со стула, характеризующееся угловыми поворотами экзоскелета 3 относительно тележки 1. Скорость движения, длина шага, длительность цикла шага, повороты задаются программно. Наблюдение и запись работы проводятся в режиме реального времени. Канал обратной связи состояния экзоскелета и функционирования его узлов может осуществляться по беспроводной связи. Предельные значения нагрузочных способностей экзоскелета определяются тестированием при максимальных нагрузках на экзоскелет путем увеличения массы антропоморфного тестового устройства 4.
Предложенный способ проведения испытаний обеспечивает возможность осуществления поворотов во время движения, расширяя тем самым процесс тестирования нагрузочных способностей экзоскелета во всех возможных формах движений. Это повышает качество и полноту процесса тестирования экзоскелета. При этом следует отметить и дополнительные качества предложенного способа: простота способа и низкие затраты, возможность тестирования в условиях бездорожья, а также приближение процесса тестирования к естественным условиям эксплуатации в части формы движений. Кроме того, предлагаемый способ может использоваться для тестирования ресурсных показателей экзоскелета, так как технологический комплекс позволяет увеличить динамическую нагрузку путем дополнительного нагружения тележки, а также увеличить сопротивление движению экзоскелета включением в работу дисковых тормозов. Все это позволяет проводить тестирование ресурсных показателей экзоскелета в форсированном режиме, а также при низких температурах окружающей среды в естественных уличных условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ физиологической оценки эффективности применения промышленного экзоскелета | 2022 |
|
RU2801867C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭКЗОСКЕЛЕТОМ | 2018 |
|
RU2698364C1 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| Способ оценки мышечной усталости на основе контроля паттернов синергии и устройство для его осуществления | 2021 |
|
RU2766764C1 |
| СПОСОБ ЧЕТЫРЕХОПОРНОГО ПЕРЕДВИЖЕНИЯ ДЕТСКОГО ЭКЗОСКЕЛЕТА | 2019 |
|
RU2739278C2 |
| Кресло-коляска | 1978 |
|
SU776610A1 |
| СПОСОБ МЕДИЦИНСКОЙ РЕАБИЛИТАЦИИ ПАЦИЕНТОВ СО СПАСТИЧЕСКОЙ ПАРАПЛЕГИЕЙ ВСЛЕДСТВИЕ ПОВРЕЖДЕНИЯ СПИННОГО МОЗГА НА ГРУДНОМ И ГРУДО-ПОЯСНИЧНОМ УРОВНЕ | 2023 |
|
RU2821772C1 |
| СПОСОБ УСТАНОВКИ НА ДЛИТЕЛЬНОЕ ХРАНЕНИЕ РАДИАЦИОННО-ОПАСНЫХ КРУПНОГАБАРИТНЫХ ОБЪЕКТОВ И РЕЛЬСОВЫЙ ПОДЪЕМНО-ТРАНСПОРТНЫЙ АГРЕГАТ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2007 |
|
RU2390063C2 |
| ШАССИ МОБИЛЬНОГО ТРАНСПОРТНОГО ОБОРУДОВАНИЯ | 2004 |
|
RU2291811C2 |
| Шахтный самоходный манипулятор | 1985 |
|
SU1321824A1 |
Изобретение относится к медицине. Способ проведения испытаний экзоскелета заключается в том, что максимальное воспроизведение возможных действий экзоскелета реализуется путем стыковки экзоскелета с опорной колесной рамкой и нагружения экзоскелета антропометрическим тестовым устройством. Механизм стыковки экзоскелета с опорной колесной рамкой выполнен в виде шарнирного узла со степенями подвижности, достаточными для передвижения экзоскелета, маневрирования, в том числе поворачивания, а также приседания и вставания со стула. Передача данных с датчиков экзоскелета на систему управления и контроля процесса испытаний осуществляется по беспроводной связи. Изобретение обеспечивает повышение качества и достижение большей достоверности тестируемых параметров, а также упрощение процесса испытаний. 4 ил.
Способ проведения испытаний экзоскелета, заключающийся в том, что максимальное воспроизведение возможных действий экзоскелета реализуется путем стыковки экзоскелета с опорной колесной рамкой и нагружения экзоскелета антропометрическим тестовым устройством, при этом механизм стыковки экзоскелета с опорной колесной рамкой выполнен в виде шарнирного узла со степенями подвижности, достаточными для передвижения экзоскелета, маневрирования, в том числе поворачивания, а также приседания и вставания со стула, причем передача данных с датчиков экзоскелета на систему управления и контроля процесса испытаний осуществляется по беспроводной связи.
| US 20040097330 A1, 20.05.2004 | |||
| СПОСОБ ЗАДАНИЯ ЖЕЛАЕМЫХ ТРАЕКТОРИЙ ДВИЖЕНИЯ ЭКЗОСКЕЛЕТА ДЛЯ ПЕРЕДВИЖЕНИЯ ПОЛЬЗОВАТЕЛЯ С НАРУШЕНИЕМ ФУНКЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА, УСТРОЙСТВО СОДЕЙСТВИЯ ХОДЬБЕ ЭТОГО ПОЛЬЗОВАТЕЛЯ И СПОСОБ УПРАВЛЕНИЯ ЭТИМ УСТРОЙСТВОМ | 2015 |
|
RU2598124C1 |
| US 9554964 B1, 31.01.2017 | |||
| US 8920347 B2, 30.12.2014 | |||
| US 20140196757 A1, 17.07.2014 | |||
| US 5980435 A, 09.11.1999. | |||

