Предлагаемое изобретение относится к вибрационной технике и может быть использовано при создании, проектировании и модернизации существующих технологических машин.
Оборудование для реализации технологических процессов, в которых обрабатываемая деталь взаимодействует с вибрирующей гранулированной или сыпучей средой, получило распространение в последние годы в различных отраслях производственной деятельности: машиностроении, химической промышленности, строительстве, горнодобывающих производствах и др. [1]. Разработано и эксплуатируется большое количество вибрационных машин, обеспечивающих перемещение сыпучих сред, транспортирование и сортировку перемещаемых материалов, ориентацию деталей в автоматических сборочных комплексах и др. Разработка вибрационных технологических машин связана с решением задач динамики разнообразных по форме и содержанию взаимодействий элементов механических колебательных структур. Расчетные схемы вибрационных технологических машин в большинстве случаев могут, особенно на предварительных стадиях разработки, исследования и проектирования, рассматриваться как механические колебательные системы с несколькими степенями свободы и сосредоточенными параметрами, работающими в условиях малых колебаний рабочих органов, обладающих свойствами симметрии.
Рабочими органами вибрационных машин обычно являются твердые тела, имеющие продольные размеры, что обеспечивает реализацию совместных проявлений вертикальных поступательных и угловых вибраций.
Разработка теоретических основ вибрационных технологий и оборудования для генерации вибрационных полей, реализации способов и средств измерения, контроля и формирования динамических состояний связано созданием определенного теоретического базиса, формируемого контактами таких научных направлений как теоретическая механика, динамика и прочность машин, теория колебаний, теория автоматического управления, системный анализ и математическое моделирование. Известность приобрели научные разработки Бабичева А.П., Бмехмана И.И., Гончаревича И.Ф., Вайсберга Л.А., Быховского И.И. Повидайло В.А. и др.
Современные вибрационные машины представляют собой достаточно сложные промышленные установки, в которых с помощью вибровозбудителей на рабочих органах формируются соответствующие специфике технологических процессов распределения амплитуд колебаний точек рабочих органов в виде вибрационных полей, параметры которых контролируются, оцениваются, корректируются и изменяются с помощью специальных систем автоматического управления. Способы и средства оценки, контроля и управления технологическими состояниями разрабатываются не только для реализации динамических процессов, но и для решения возникающих сопутствующих задач динамики, относящихся к вибрационной защите и виброизоляции оборудования, приборов и аппаратуры.
Многообразие предлагаемых решений по повышению производительности, надежности работы и безопасности эксплуатации оборудования предопределяют инициативы поиска и разработки инновационных конструктивно-технических решений. Большой интерес представляет введение дополнительных связей, использование динамических эффектов связанности движений, в том числе динамического гашения колебаний и др.
В процессе патентного поиска выявлен ряд изобретений-аналогов.
Известна полезная модель [Скрипка Д.О. «Вибрационная установка», 95574, МПК В22С 15/00, приоритет 10.07.2007], представляющее собой вибрационную установку включает раму, установленную на опоре, и вибровозбудитель колебаний с электродвигателем, отличающаяся тем, что в качестве рамы используют металлический блок-каркас с резиновой прокладкой по его краям, обшитый стальным тонколистовым прокатом и выполненный в форме параллелепипеда, при этом вибровозбудитель колебаний выполнен в виде рабочей машины с валом, имеющим измененный центр тяжести и установленным на подшипниках скольжения, причем вал рабочей машины и электродвигатель связаны между собой муфтой и жестко закреплены через опоры к пластине из железа через резиновую прокладку к каркасу рамы.
Недостатки представленного аналога: отсутствие математического описания работы вибрационной машины и средств регулирования динамического состояния.
Известна вибрационная машина [Марченко А.Ю., Серга Г.В., Иванов А.Н. «Машина вибрационная для выделения семян», 2580433 С1, МПК A23N 4/12 (2006.01), приоритет 10.04.2016], содержащая корпус и установленный в нем полый перфорированный ротор, узел подачи воды, загрузочное и разгрузочное приспособления. Корпус выполнен в виде закрытого со всех сторон короба с расположенными поярусно, друг под другом, и соединенными жестко в единую технологическую цепочку тремя винтовыми пустотелыми перфорированными роторами, вибровозбудителем и упругими элементами. При этом каждый винтовой пустотелый перфорированный ротор смонтирован, по меньшей мере, из одной, свернутой в цилиндрические витки, соединенные друг с другом по продольным кромкам, перфорированной полосы, согнутой по размещенным под углом к ее продольным кромкам линиям сгиба, с образованием по наружной и внутренней поверхностям направленных в одну сторону винтовых линий и винтовых поверхностей в виде перфорированных карманов многоугольной формы. Причем расстояние между линиями сгиба равно длине каждого элемента многоугольника, при этом перфорированные карманы по внутренней поверхности могут отличаться от формы и размеров перфорированных карманов по наружной поверхности и по периметру барабана могут быть различными не только, но и по форме и направление винтовых линий каждого из поярусно ниже установленных пустотелых винтовых перфорированных роторов противоположно направлению винтовых линий пустотелых перфорированных роторов, смонтированных выше. Узел подачи воды включает смонтированные внутри корпуса над каждым винтовым пустотелым перфорированным ротором три коллектора и шесть патрубков, по два из которых введены через стенки корпуса внутрь каждого из трех винтовых пустотелых перфорированных роторов, а разгрузочные приспособления изготовлены в виде склизов, смонтированных внутри корпуса под углом к горизонту и с перфорациями на участках склизов, размещенных внутри корпуса. Устройство позволяет упростить конструкцию и расширить его технологические возможности, сократить габариты по длине и повысить эффективность отделения семян.
В описании изобретения отсутствует математическое описание динамических эффектов, возникающих в процессе работы установки, а также нет средств регулирования динамического состояния.
Известно вибрационное устройство для просеивания и подачи материала [Чжу С. «Вибрационное устройство для просеивания и подачи материала», 2567250 С2, МПК В07В 1/28, В07В 1/42, приоритет 10.11.2015], выполненное с одним валом и с возможностью изменения траектории движения, содержит вибрационный короб, нижнюю опорную плиту, вибрационную пружину, вибрационный вал, установленный на вибрационном коробе. Вибрационная пружина установлена между вибрационным коробом и нижней опорной плитой. На двух сторонах вибрационного короба установлено множество групп стержневых узлов, ограничивающих траекторию движения и расположенных наклонно. Каждая группа стержневых узлов, ограничивающих траекторию движения, содержит два стержневых узла, ограничивающих траекторию движения, которые расположены симметрично с обеих сторон вибрационного короба, причем оба конца каждого стержневого узла, ограничивающего траекторию движения, шарнирно прикреплены к вибрационному коробу и нижней опорной плите.
Недостатками рассматриваемого изобретения являются влияние вибрационных воздействий на средства корректировки динамического состояния.
За прототип принимается изобретение [Пановко Г.Я., Шохин А.Е., Бармина О.В., Еремейкин С.А. «Способ управления амплитудой при автоматической настройке на резонансный режим колебаний вибрационной машины с приводом от асинхронного двигателя», 2653961, МПК В06В 1/14, приоритет 15.05.2018], заключающееся в том, что колебания рабочего органа вибрационной машины с демпфером с заданными диссипативными характеристиками возбуждают периодической силой за счет вращения дебаланса инерционного вибровозбудителя с приводом от асинхронного двигателя, частоту вращения которого настраивают на резонансный режим колебаний механической системы вибрационной машины по заданному алгоритму, для чего одновременно измеряют перемещение рабочего органа и угловое положение дебаланса. Затем измеряют рассогласование амплитуды колебаний рабочего органа с наперед заданным ее значением, изменяют величину диссипации энергии колебаний в демпфере, сводя величину рассогласования амплитуды колебаний рабочего органа к нулю, при этом изменение величины диссипации вычисляют по заданному алгоритму, который связывает амплитуду колебаний рабочего органа и диссипативные характеристики демпфера. Технический результат заключается в поддержании требуемой амплитуды при автоматической настройке на резонансный режим колебаний рабочего органа вибрационной машины.
Основными недостатками прототипа являются отсутствие математического описания возникающих эффектов. Также не принимается во внимание вращательная степень свободы движения рабочего органа.
Задачей предлагаемого изобретения является настройка динамического состояния вибрационной технологической машины при помощи изменения положения узла крепления упруго-массовой структуры к рабочему органу.
Устройство формирования и управления динамическим состоянием вибрационной технологической машины, состоящее из рабочего стола, приводов, блока управления и вибродатчиков, отличающееся тем, что дополнительно включены блоки обработки информации и управления, два массоинерционных элемента, расположенные на концах стержней и соединенные между собой упругим элементом в верхней части, причем стержни крепятся к каретке, установленной в нижней части рабочего органа с возможностью перемещения по полозьям при помощи приводов и ходовых винтов, причем за фиксации параметров динамического состояния рабочего органа вибрационными датчиками и передачи их в блок обработки и управления с соответствующим изменением положения узла крепления массоинерционных элементов к рабочему органу информации обеспечивается настройка и управление динамическим состоянием вибрационной машины.
Способ формирования и управления динамическим состоянием вибрационной технологической машины, включающий возбуждение колебаний рабочего органа вибрационной технологической машины и регистрацию смещений координат движения вибрационной технологической машины, отличающееся тем, что дополнительно с использованием устройства формирования и управления динамическим состоянием вибрационной технологической машины по п. 1 осуществляют настройку, регулирование и управление колебаниями рабочего органа, для чего вводят блоки обработки информации и управления, соединенные с вибрационными датчиками, фиксирующими параметры динамического состояния рабочего органа, для настройки динамического состояния при помощи изменения положения узла крепления массоинерционных элементов к рабочему органу с помощью приводов, соединенных с блоками обработки информации и управления.
Суть изобретения поясняется чертежами.
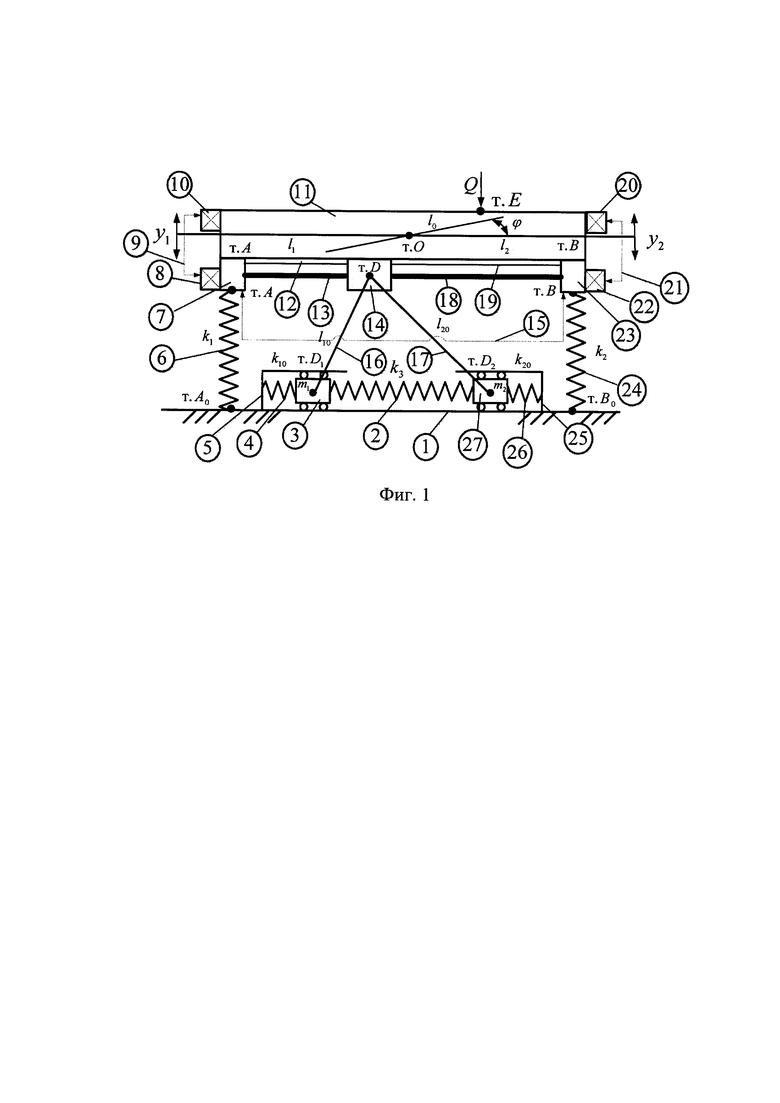
На фиг. 1 приведена принципиальная схема вибрационной технологической машины, содержащая опорную поверхность 1, пружины 2, 4, 6, 24, 26, массоинерционные элементы 3, 27, направляющие 5 и 25, приводы 7, 23, блоки обработки информации и управления 8, 22, коммуникации 9, 15, 21, вибрационные датчики 10, 20, рабочий орган 11, полозья 12, 19, ходовые винты 13, 18, каретка 14, стержни 16, 17.
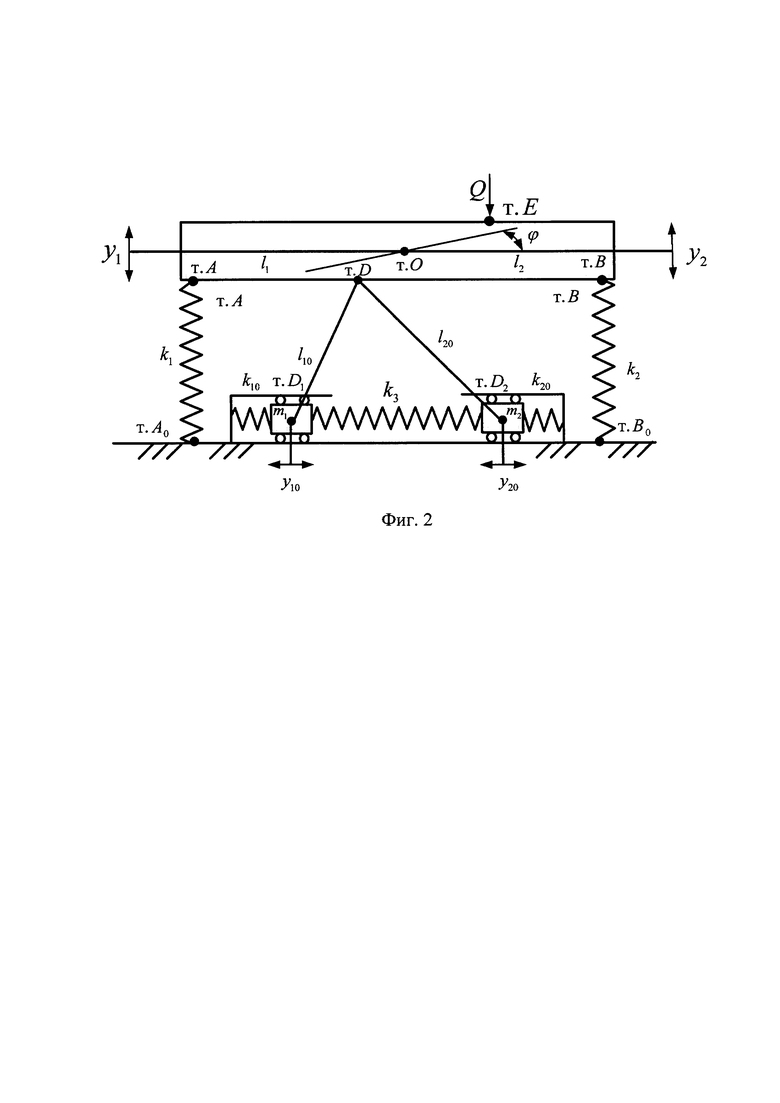
На фиг. 2 показана расчетная схема вибрационной технологической машины с дополнительными динамическими связями.
На фиг. 3 приведена структурная схема исходной системы.
Изобретение работает следующим образом.
Предлагаемое изобретение представляет собой механическую колебательное систему, состоящую из рабочего органа 11 в виде твердого тела, опирающегося на упругие элементы (пружины) 6 и 24, имеющую специальную систему формирования динамических параметров работы с помощью специальных устройств и система оценки состояния и управления параметрами вибрационного поля на основе применения специальных средств настройки и коррекции. Возбуждается рабочий орган 11 вибрационное устройством, приложенным в т. Е на расстоянии  от центра масс. В т. D к рабочему органу шарнирно закрепляется два стержня 16 и 17 длинами
от центра масс. В т. D к рабочему органу шарнирно закрепляется два стержня 16 и 17 длинами  точка D является шарниром, закрепленным на каретке 14, которая перемещается по специальным полозьям 12, 19, имеющим соединение типа «ласточкин хвост». Движение создается с помощью ходовых винтов 13, 18 приводимых в движение специальными приводами 7 и 23. Параметры динамического состояния рабочего органа 11 фиксируются вибрационными датчиками 10, 20; информация дается передается по коммуникациям 9, 15, 21 в блоки обработки информации и управления 8, 22. Движение каретки через стержни или рычаги 16, 17 передается массоинерционным элементам 3 и 27 в точках D1 и D2. Массоинерционные элементы соединяются между собой по цепной схеме пружинами 2, 4, 26. Горизонтальное движение элементов массами m1 и m2 обеспечивается специальными направляющими 5 и 25.
точка D является шарниром, закрепленным на каретке 14, которая перемещается по специальным полозьям 12, 19, имеющим соединение типа «ласточкин хвост». Движение создается с помощью ходовых винтов 13, 18 приводимых в движение специальными приводами 7 и 23. Параметры динамического состояния рабочего органа 11 фиксируются вибрационными датчиками 10, 20; информация дается передается по коммуникациям 9, 15, 21 в блоки обработки информации и управления 8, 22. Движение каретки через стержни или рычаги 16, 17 передается массоинерционным элементам 3 и 27 в точках D1 и D2. Массоинерционные элементы соединяются между собой по цепной схеме пружинами 2, 4, 26. Горизонтальное движение элементов массами m1 и m2 обеспечивается специальными направляющими 5 и 25.
Способ формирования и управления экономическим состоянием обеспечивается смещением т. D относительно центра масс (т. О) на величину  то есть расчетную величину, обеспечивающую необходимые параметры вибрационного состояния. Настройка и коррекция могут производиться как вручную (перед запуском машины) или осуществляться автоматически через блок обработки информации и управления.
то есть расчетную величину, обеспечивающую необходимые параметры вибрационного состояния. Настройка и коррекция могут производиться как вручную (перед запуском машины) или осуществляться автоматически через блок обработки информации и управления.
Теоретическое обоснование
Расчетная схема вибрационной технологической машины с рычажным устройством для формирования дополнительных динамических связей представляет собой механическую колебательную систему с двумя степенями свободы, состоящую из протяженного твердого тела, обладающего массой Μ и моментом инерции J. Твердое тело опирается на базовые упругие элементы с жесткостями k1 и k2. Движение системы описывается в координатах у1 и у2; система координат связана с неподвижным базисом (фиг. 2). Твердое тело связано с рычажной системой из двух стержней длинными  которые имеют общий вращательный шарнир (узел) в т. D твердого тела на расстоянии
которые имеют общий вращательный шарнир (узел) в т. D твердого тела на расстоянии  Другие концы рычагов шарнирно соединены в тт. D1, D2 с массоинерционными элементами массами m1 и m2; инерционные элементы связаны между собой пружинами с жесткостями k10, k2, k20. Движение дополнительных массоинерционных элементов происходит по направляющим относительно неподвижной опорной поверхности. Предполагается, что система обладает линейными свойствами и совершает малые колебания относительно положения статического равновесия.
Другие концы рычагов шарнирно соединены в тт. D1, D2 с массоинерционными элементами массами m1 и m2; инерционные элементы связаны между собой пружинами с жесткостями k10, k2, k20. Движение дополнительных массоинерционных элементов происходит по направляющим относительно неподвижной опорной поверхности. Предполагается, что система обладает линейными свойствами и совершает малые колебания относительно положения статического равновесия.
При оценке динамических свойств исходной системы предполагает полагается также, что угол наклона стержней обеспечивает при отсутствии эффектов самоторможения. При выводе уравнений движения и построении математических моделей используется методика, изложенная в работе [2].
Для проведения соответствующих расчетов используются следующие соотношения между координатами и параметрами системы, расчетная схема которой представлена на фиг. 2

Координаты у10, у20 находятся в зависимости от параметров дополнительных связей, полагаемых рычажными механизмами

В выражениях (2) и (3) i1 и i2 являются передаточными отношениями, которые формируются из плоского движения стержней, совершающих вращение относительно мгновенного центра скоростей. В данном случае


Где  - параметры положения твердого тела в статическом состоянии.
- параметры положения твердого тела в статическом состоянии.
Для дальнейших расчетов определим выражения для кинетической и потенциальной энергий системы в выбранных координатах


Сделаем промежуточные выкладки, полагая, что:

Где  - является расстояниями
- является расстояниями  (фиг. 2).
(фиг. 2).
Обозначим yD = ay1 + by2, тогда:


где где 
В этом случае выражения (6), (7) примут вид:


После преобразований Лапласа при нулевых начальных условиях получим систему уравнений движения в операторной форме [2]


Для удобства дальнейших расчетов и получения необходимых аналитических соотношений введем ряд обозначений:






Передаточная функция межпарциальных связей имеет вид:

Характеристическое частотное уравнение системы может быть записано в виде:

Наличие полученных выражений позволяет оценить возможности изменения динамических свойств системы в плане приведения технологического процесса (11), (12).
1. На основе использования системы уравнений в операторной форме может быть построена структурная математическая модель системы (как это представлено на фиг. 3). В физическом смысле, механическая колебательная система (фиг. 2), может быть отображена эквивалентной в динамическом отношении структурной схемой некоторой системы автоматического управления. Это позволяет использовать получаемые при таком подходе передаточные функции и другие характеристики с использованием аналитического аппарата теории автоматического управления; естественно, в определенных границах, в частности, при вибрационных воздействиях монигармонической природы.
В выражениях (13)-(22) переменная p - является комплексной величиной p=jω (j=√-1), значок ↔ над переменной означает ее изображение по Лапласу [2].
В данном случае исходный объект отображается как механическая колебательная система с двумя степенями свободы при совместном действии двух гармонических силовых факторов одной частоты, но разной амплитуды. Частоты собственных колебаний системы могут быть найдены из характеристического частотного уравнения (22) аналитически.
Из полученных уравнений движения и передаточных функций, определяемых из структурной схемы на фиг. 3, могут быть получены выражения для определения частот динамического гашения колебаний и значений отношения амплитуд колебаний при предельных частотах


При p → 0 (ω → 0)

При p → ∞ (ω → ∞)

Особенностью предлагаемого подхода в оценке и формировании динамических состояний рабочего органа является то, что введение рычажных связей формирует и новые динамические режимы работы вибрационной технологической машины. В частности, структурная математическая модель (фиг. 3) отображает принципиальные возможности «обнуления» межпарциальных связей на частоте, определяемой из (17), (18).

Используя полученные аналитические соотношения, определяющие возможности изменения динамических состояний за счет варьирования передаточными отношениями, величинами присоединяемых масс m1, m2, а также значениями жесткостей k10, k20, k30, которые находятся в зоне доступа для ручной поднастройки, можно поддерживать рациональные регламенты технологического процесса.
Список использованных источников
1. Копылов Ю.Р. Динамика процессов виброударного упрочнения: монография / Воронеж: ИПЦ «Научная книга», 2011. - 569 с.
2. Елисеев С. В. Прикладной системный анализ и структурное математическое моделирование (динамика транспортных и технологических машин: связность движений, вибрационные взаимодействия, рычажные связи): монография - Иркутск: ИрГУПС, 2018. - 692 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования, настройки и корректировки динамического состояния рабочих органов технологических вибрационных машин на основе введения дополнительных упругих связей и устройство для его реализации | 2019 |
|
RU2749364C2 |
| Устройство настройки, коррекции, формирования и управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2751042C1 |
| Способ управления динамическим состоянием технологической вибрационной машины и устройство для его осуществления | 2018 |
|
RU2711832C1 |
| Способ изменения и настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2710314C1 |
| Способ настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2718177C1 |
| Устройство коррекции динамического состояния рабочего органа вибрационной технологической машины и способ для его осуществления | 2020 |
|
RU2749987C1 |
| Способ коррекции динамического состояния рабочего органа технологической вибрационной машины с вибровозбудителем на упругой опоре и устройство для его реализации | 2019 |
|
RU2728886C1 |
| Способ настройки распределения амплитуд колебаний рабочего органа вибростенда и устройство для его осуществления | 2018 |
|
RU2695899C1 |
| Устройство управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2755534C1 |
| Устройство настройки, корректировки и формирования динамического состояния вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2755646C1 |

Изобретение относится к машиностроению, в частности к вибрационной технике, и может быть использовано при создании, проектировании и модернизации существующих технологических машин. Устройство состоит из рабочего органа, приводов, блока управления и вибродатчиков, согласно изобретению дополнительно включены блоки обработки информации и управления, два массоинерционных элемента, расположенные на концах стержней и соединенные между собой упругим элементом в верхней части. При этом стержни крепятся к каретке, установленной в нижней части рабочего органа с возможностью перемещения по полозьям при помощи приводов и ходовых винтов, причем за счет фиксации параметров динамического состояния рабочего органа вибрационными датчиками и передачи их в блок обработки информации и управления с соответствующим изменением положения узла крепления массоинерционных элементов к рабочему органу обеспечивается настройка и управление динамическим состоянием вибрационной машины. Способ включает возбуждение колебаний рабочего органа вибрационной технологической машины и регистрацию смещений координат движения вибрационной технологической машины. Дополнительно с использованием устройства формирования и управления динамическим состоянием вибрационной технологической машины осуществляют настройку, регулирование и управление колебаниями рабочего органа, для чего вводят блоки обработки информации и управления, соединенные с вибрационными датчиками, фиксирующими параметры динамического состояния рабочего органа, для настройки динамического состояния при помощи изменения положения узла крепления массоинерционных элементов к рабочему органу с помощью приводов, соединенных с блоками обработки информации и управления. Технический результат заключается в поддержании требуемой амплитуды при автоматической настройке на резонансный режим колебаний рабочего органа вибрационной машины. 2 н.п. ф-лы, 3 ил. 
1. Устройство формирования и управления динамическим состоянием вибрационной технологической машины, состоящее из рабочего органа, приводов, блока управления и вибродатчиков, отличающееся тем, что дополнительно включены блоки обработки информации и управления, два массоинерционных элемента, расположенные на концах стержней и соединенные между собой упругим элементом в верхней части, причем стержни крепятся к каретке, установленной в нижней части рабочего органа с возможностью перемещения по полозьям при помощи приводов и ходовых винтов, причем за счет фиксации параметров динамического состояния рабочего органа вибрационными датчиками и передачи их в блок обработки информации и управления с соответствующим изменением положения узла крепления массоинерционных элементов к рабочему органу обеспечивается настройка и управление динамическим состоянием вибрационной машины.
2. Способ формирования и управления динамическим состоянием вибрационной технологической машины, включающий возбуждение колебаний рабочего органа вибрационной технологической машины и регистрацию смещений координат движения вибрационной технологической машины, отличающийся тем, что дополнительно с использованием устройства формирования и управления динамическим состоянием вибрационной технологической машины по п. 1 осуществляют настройку, регулирование и управление колебаниями рабочего органа, для чего вводят блоки обработки информации и управления, соединенные с вибрационными датчиками, фиксирующими параметры динамического состояния рабочего органа, для настройки динамического состояния при помощи изменения положения узла крепления массоинерционных элементов к рабочему органу с помощью приводов, соединенных с блоками обработки информации и управления.
| СПОСОБ УПРАВЛЕНИЯ АМПЛИТУДОЙ ПРИ АВТОМАТИЧЕСКОЙ НАСТРОЙКЕ НА РЕЗОНАНСНЫЙ РЕЖИМ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2017 |
|
RU2653961C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ СОСТОЯНИЕМ ВИБРАЦИОННОЙ ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ | 2017 |
|
RU2693711C2 |
| Способ настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2718177C1 |
| Способ управления структурой вибрационного поля вибрационной технологической машины на основе использования эффектов динамического гашения и устройство для его осуществления | 2016 |
|
RU2624757C1 |
| ВИБРАЦИОННОЕ УСТРОЙСТВО ДЛЯ ПРОСЕИВАНИЯ И ПОДАЧИ МАТЕРИАЛА | 2012 |
|
RU2567250C2 |
| Способ управления формированием структуры и параметров вибрационного поля технологической машины | 2018 |
|
RU2691646C1 |

