Изобретение относится к способу предотвращения неисправностей при эксплуатации моторизованной двери, содержащему по меньшей мере один датчик, выполненный с возможностью обеспечивать данные датчика временных рядов для по меньшей мере одной переменной моторизованной двери, и к системе контроля моторизованной двери.
Моторизованные двери используются во многих различных транспортных средствах, например в поездах. Главным образом в поездах с высокой пропускной способностью и малым временем ожидания на станции, например, в пригородных поездах или поездах метро, причём компоненты этих дверей подвергаются высоким нагрузкам и быстро становятся объектом износа. Это приводит к износу этих компонентов в более коротких циклах по сравнению с компонентами других (моторизованных) дверей, что обычно увеличивает частоту отказов при эксплуатации одних и тех же компонентов. Кроме того, другие так называемые аномалии состояния моторизованных дверей могут препятствовать их плавному функционированию. Следовательно, необходимо осуществлять контроль состояния, который позволяет оценивать рабочее состояние моторизованной двери и обеспечивает своевременное её обслуживание.
В технике существующего уровня принято осуществлять такой контроль состояния посредством сравнения электрического тока приводного двигателя моторизованной двери с заданным пороговым значением. Когда величина тока двигателя превышает пороговое значение, активируется диагностический код. Однако, этот способ не очень применим на практике, не является прогностическим, и часто упомянутое выше пороговое значение устанавливается слишком высоким. Таким образом, когда достигается пороговое значение, моторизованная дверь уже вышла из строя. Следовательно, такие способы позволяют выявлять неисправности моторизованной двери, но не предотвращают её выхода из строя.
По этой причине задачей изобретения является обеспечение способа эффективного предотвращения неисправностей при эксплуатации моторизованной двери, который позволяет осуществлять эффективный контроль моторизованной двери, является прогностическим, и предотвращает чрезмерный износ и поломку двери.
В соответствии с изобретением, обеспечивается способ предотвращения неисправностей при эксплуатации моторизованной двери. Способ содержит по меньшей мере один датчик, выполненный с возможностью обеспечивать данные датчика временных рядов для по меньшей мере одной переменной моторизованной двери. Кроме того, способ отличается тем, что данные датчика временных рядов используются для машинного обучения с целью контроля, обнаружения и/или прогнозирования аномалий в функционировании моторизованной двери. Предпочтительно, по меньшей мере один датчик выполняется с возможностью обеспечивать данные датчика временных рядов для по меньшей мере одного параметра моторизованной двери.
Способ в соответствии с изобретением предоставляет машинное обучение для моторизованных дверей поездов, позволяя осуществлять оптимизированный контроль моторизованной двери и предотвращать повреждения и неисправности при её эксплуатации.
В предпочтительном варианте осуществления изобретения машинное обучение выполняется нейронной сетью. Нейронные сети частично имитируют биологические системы, делают возможным эффективное обучение, и могут быть легко обучаемыми. Кроме того, нейронные сети позволяют контролировать состояние моторизованной двери с увеличивающейся эффективностью на каждом цикле обучения.
Предпочтительно, нейронная сеть является свёрточно-рекуррентной нейронной сетью. Свёрточные нейронные сети хорошо подходят для задач распознавания изображений. Рекуррентные нейронные сети хорошо подходят для распознавания речи и задач по обработке естественного языка. Сочетание этих нейронных сетей означает сочетание этих преимуществ.
В предпочтительном варианте осуществления изобретения по меньшей мере одна переменная содержит ток приводного двигателя моторизованной двери и/или рабочее состояние моторизованной двери. Кроме того, предпочтительно, по меньшей мере одна переменная содержит значение тока приводного двигателя моторизованной двери и/или значение, представляющее рабочее состояние моторизованной двери. Предпочтительно, рабочее состояние моторизованной двери является положением моторизованной двери или элемента моторизованной двери. В дополнительном предпочтительном варианте осуществления изобретения рабочим состоянием моторизованной двери является рабочее состояние по меньшей мере одного элемента двери, в частности по меньшей мере одного подвижного элемента двери, и особенно предпочтительно, подвижной в поперечном направлении створки моторизованной двери. Предпочтительно, ток двигателя является электрическим током, который используется для питания приводного двигателя, выполненного с возможностью открывать и закрывать моторизованную дверь. В таком варианте осуществления изобретения данные датчика временных рядов, относящиеся к току двигателя, могут быть объединены с данными датчика временных рядов, относящимися к рабочему состоянию моторизованной двери, для осуществления точного контроля моторизованной двери и обеспечения возможности прогнозировать гарантированное поддержание рабочего состояния моторизованной двери.
Предпочтительно, способ содержит этап выполнения неконтролируемого обучения рабочим режимам моторизованной двери с использованием данных датчика временных рядов. Неконтролируемое обучение обеспечивает преимущество, состоящее в возможности идентифицировать структуры в данных датчика временных рядов.
В предпочтительном варианте осуществления изобретения алгоритм динамического искажения времени используется на этапе выполнения неконтролируемого обучения, для того чтобы сравнивать данные датчика временных рядов друг с другом. Предпочтительно, на этапе выполнения неконтролируемого обучения для сравнения данных датчика временных рядов друг с другом сравниваются различные наборы данных датчика временных рядов. Предпочтительно, наборы данных датчика временных рядов объединяются в кластеры с использованием иерархического алгоритма. Предпочтительно, идеальная кривая каждого нормального рабочего режима рассчитывается впоследствии как среднее значение. Предпочтительно, индивидуальные данные датчика временных рядов затем сравниваются с идеальными кривыми также с использованием динамического искажения времени. Кроме того, предпочтительно, каждый кластер, связанный с нормальным режимом, затем подаётся на отдельную одноклассовую векторную вычислительную машину для обнаружения новизны, при этом каждая машина считывает последовательность датчиков и оценивает, принадлежит ли она её нормальному рабочему режиму. Предпочтительно, если все машины оценивают последовательность как аномалию, она отмечается как таковая.
Кроме того, предпочтительно, этап выполнения неконтролируемого обучения содержит этапы извлечения различных наборов данных датчика временных рядов, относящихся, соответственно, к нормальным и/или ненормальным рабочим режимам моторизованной двери, и генерацию меток, соответственно, для извлечённых различных наборов данных датчика временных рядов. В таком варианте осуществления изобретения алгоритм машинного обучения, используемый для способа, может эффективно обучаться различать различные рабочие режимы и точно оценивать эти рабочие режимы моторизованной двери.
Предпочтительно, сгенерированные метки обозначают рабочие состояния моторизованной двери.
Предпочтительно, способ дополнительно содержит этап выполнения контролируемого обучения рабочим режимам моторизованной двери с использованием данных датчика временных рядов. Контролируемое обучение обеспечивает преимущество, состоящее в возможности обобщения решения, что позволяет алгоритму машинного обучения, используемому в способе, находить решения схожих связанных проблем.
Предпочтительно, машинное обучение выполняется с помощью алгоритма машинного обучения. Кроме того, предпочтительно, этап выполнения контролируемого обучения содержит этап использования сгенерированных меток для обучения алгоритма машинного обучения классифицировать нормальные и/или ненормальные рабочие режимы моторизованной двери, основываясь на данных датчика временных рядов. В таком варианте осуществления изобретения нормальные и/или ненормальные рабочие режимы моторизованной двери могут быть точно определены и учтены для прогнозирования в соответствии с заданной схемой.
Предпочтительно, нормальный рабочий режим моторизованной двери является режимом моторизованной двери, в котором она функционирует заданным образом, например, полностью открывается и/или закрывается таким образом, что потребляет ток двигателя со значением, которое находится в заданном диапазоне.
Предпочтительно, ненормальный рабочий режим моторизованной двери является режимом моторизованной двери, в котором она не функционирует заданным образом, например, в котором она не полностью открывается и/или закрывается, и/или в котором она потребляет ток двигателя со значением, которое не находится в заданном диапазоне.
В предпочтительном варианте осуществления изобретения этап выполнения контролируемого обучения содержит этап использования экспериментальных меток, которые были сгенерированы в экспериментах, чтобы обучить алгоритм машинного обучения классифицировать нормальные и/или ненормальные рабочие режимы моторизованной двери, основываясь на данных датчика временных рядов. В дополнительном предпочтительном варианте осуществления изобретения этап выполнения контролируемого обучения содержит этап использования сгенерированных меток и экспериментальных меток, которые были сгенерированы в экспериментах, чтобы обучить алгоритм машинного обучения классифицировать нормальные и/или ненормальные рабочие режимы моторизованной двери, основываясь на данных датчика временных рядов. При использовании экспериментальных меток улучшаются эффективность контроля и возможность прогнозирования для данного способа.
Предпочтительно, способ дополнительно содержит этап фильтрации данных датчика временных рядов на основе классификации. Кроме того, предпочтительно, способ дополнительно содержит этап фильтрации данных датчика временных рядов на основе классификации рабочего режима, согласующегося с данными соответствующего датчика временных рядов. В таком варианте осуществления изобретения данные датчика временных рядов, соответствующие рабочим режимам моторизованной двери, которые не должны учитываться, например, ненормальные рабочие состояния моторизованной двери из-за взаимодействия с человеком, например, с пассажиром, блокирующим дверь, могут быть исключены из процедуры обучения. Иными словами, на этом этапе так называемые аномалии рабочего режима, которые происходят, например, когда пассажир блокирует моторизованную дверь, принудительно повторно открывает её или прислоняется к моторизованной двери при её закрытии, могут быть исключены из процедуры машинного обучения, пренебрегая теми данными датчика временных рядов, которые соответствуют этим аномалиям рабочего режима.
Предпочтительно, на этапе фильтрации данные датчика, относящиеся к заданным нормальным и/или ненормальным рабочим режимам моторизованной двери, отфильтровываются. Кроме того, предпочтительно, на этапе фильтрации данные датчика, соответствующие заданным нормальным и/или ненормальным рабочим режимам моторизованной двери, отфильтровываются. В таком варианте осуществления изобретения можно учитывать только нормальные и/или ненормальные режимы работы, на которые влияют, например, электромеханические компоненты моторизованной двери.
Предпочтительно, способ дополнительно содержит этап извлечения заданных наборов целевых данных временных рядов из фильтрованных данных датчика временных рядов. В таком варианте осуществления изобретения для машинного обучения учитываются только желаемые нормальные и/или ненормальные рабочие режимы моторизованной двери.
Предпочтительно, первая группа наборов целевых данных временных рядов представляет ток приводного двигателя моторизованной двери во время свободного перемещения моторизованной двери. Соответственно, при таком свободном перемещении моторизованная дверь перемещается с постоянной скоростью. В таком варианте осуществления изобретения способ, среди прочего, позволяет сделать вывод об ухудшении характеристик компонентов моторизованной двери.
Кроме того, предпочтительно, вторая группа наборов целевых данных временных рядов представляет, соответственно, рабочие состояния моторизованной двери, при этом вторая группа наборов целевых данных временных рядов объединяется с первой группой наборов целевых данных временных рядов, для того чтобы интерполировать свободное перемещение моторизованной двери. В этом варианте осуществления изобретения способ позволяет спрогнозировать период времени, после которого определённые компоненты моторизованной двери будет необходимо заменять или обслуживать.
Кроме того, обеспечивается система контроля для моторизованной двери. Система контроля выполняется с возможностью выполнять способ, в соответствии с изобретением. Такая система контроля позволяет осуществлять эффективный и прогностический контроль, а также предотвращать возникновение неисправностей при эксплуатации моторизованной двери, главным образом при эксплуатации моторизованной двери поезда.
Характеристики, признаки и преимущества этого изобретения и способ, с помощью которого они проявляются, как описывается выше, станут более очевидными и более понятными во взаимосвязи с последующим описанием показательных вариантов осуществления изобретения, которые объясняются со ссылками на прилагаемые чертежи.
Фиг.1 показывает блок-схему варианта осуществления способа, в соответствии с изобретением, и
Фиг.2 показывает вариант осуществления системы контроля для моторизованной двери, в соответствии с изобретением.
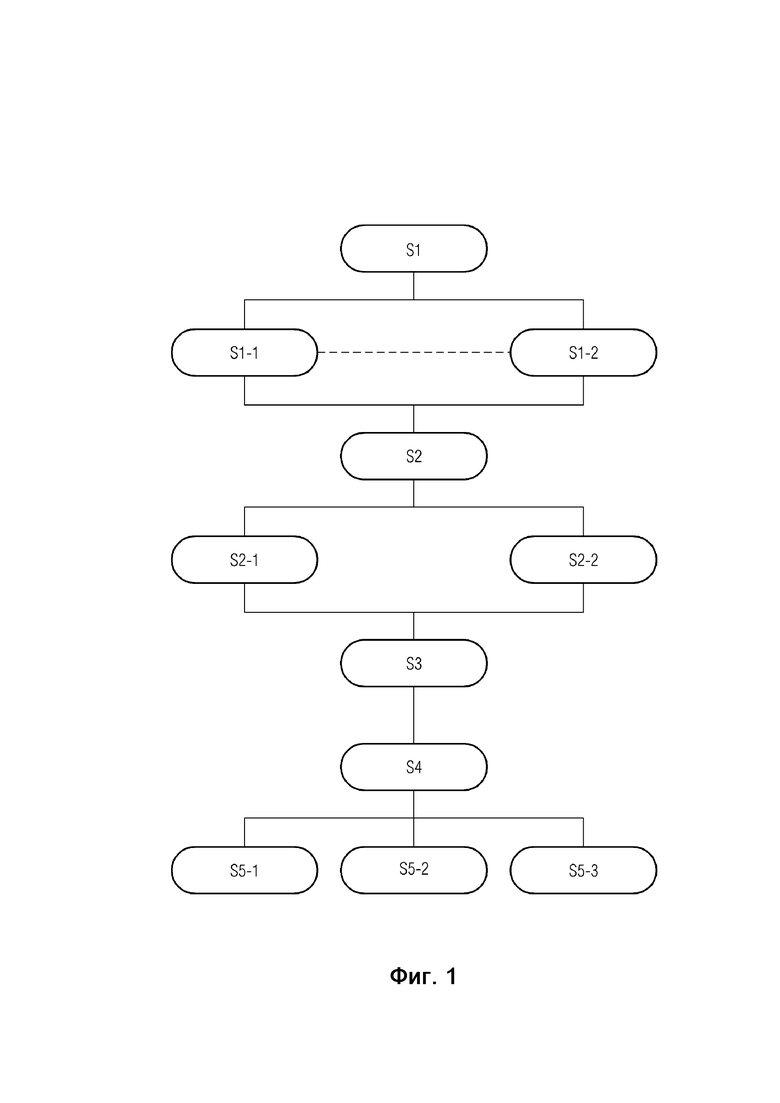
На фиг.1 показывается блок-схема варианта осуществления способа предотвращения неисправностей при эксплуатации моторизованной двери, в соответствии с изобретением. В этом варианте осуществления изобретения способ содержит два датчика (не показаны), выполненные с возможностью обеспечивать данные датчика временных рядов для тока приводного двигателя моторизованной двери и данные датчика временных рядов для рабочего состояния моторизованной двери. Однако, другие переменные или параметры моторизованной двери также могут быть объектом данных датчика временных рядов, используемых в способе, осуществляемом в соответствии с изобретением. Например, данные датчика временных рядов для диагностических кодов моторизованной двери могут чередоваться или приниматься дополнительно. В этом варианте осуществления изобретения данные датчика временных рядов используются для машинного обучения с целью контроля S5-1, обнаружения S5-2 и прогнозирования S5-3 аномалий при эксплуатации моторизованной двери. Однако, могут выполняться другие варианты осуществления способов, в соответствии с изобретением, в которых данные датчика временных рядов используются для машинного обучения только с целью контроля S5-1, или только с целью обнаружения, или только с целью прогнозирования аномалий при эксплуатации моторизованной двери. В этом варианте осуществления изобретения моторизованная дверь, в качестве примера, является моторизованной дверью поезда.
Кроме того, в этом варианте осуществления изобретения машинное обучение, в качестве примера, выполняется свёрточно-рекуррентной нейронной сетью. Однако, также могут быть выполнены другие варианты осуществления способов, в соответствии с изобретением, в которых используются другие нейронные сети, или даже другие алгоритмы машинного обучения. Способ, в качестве примера, содержит этап выполнения неконтролируемого обучения S1 рабочим режимам моторизованной двери с использованием данных датчика временных рядов, обеспечиваемых датчиком. В этом варианте осуществления изобретения нормальный рабочий режим может, например, содержать информацию о том, что моторизованная дверь полностью открыта или закрыта правильно, и что ток приводного двигателя моторизованной двери имеет заданный режим или характеристику. Ненормальный рабочий режим может, например, содержать информацию о том, что обнаружена аномалия в процедуре открытия или закрытия моторизованной двери и/или ток двигателя имеет нежелательное значение или характеристику во время процедуры открытия или закрытия моторизованной двери.
В этом варианте осуществления изобретения этап выполнения неконтролируемого обучения S1 содержит этапы извлечения S1-1 различных наборов данных датчика временных рядов, относящихся, соответственно, к нормальным и ненормальным рабочим режимам моторизованной двери, и генерацию меток S1-2, соответственно, для извлечённых различных наборов данных датчика временных рядов. Такие метки могут быть ориентированы, например, на состояния открытия или состояния закрытия моторизованной двери. На фиг. 1 пунктирная линия показывает, что метки генерируются для извлечённых наборов данных датчика временных рядов. Другими словами, данные датчика временных рядов проходят через несколько этапов обучения признакам, при этом извлекаются нормальные и ненормальные рабочие режимы, и метки для таких данных генерируются автоматически. Этот этап необходим для некалиброванной, неподготовленной системы и для обнаружения данных.
В этом варианте осуществления изобретения способ дополнительно содержит этап выполнения контролируемого обучения S2 рабочим режимам моторизованной двери с использованием данных датчика временных рядов, при этом машинное обучение выполняется с помощью алгоритма машинного обучения. Кроме того, этап выполнения контролируемого обучения S2 дополнительно содержит этап использования сгенерированных меток, чтобы обучать алгоритм S2-1 машинного обучения классифицировать нормальные и ненормальные рабочие режимы моторизованной двери, основываясь на данных датчика временных рядов. Иными словами, метки, которые были сгенерированы на этапе S1-2, описанном выше, используются для обучения алгоритма S2-1 машинного обучения, чтобы классифицировать нормальные и ненормальные рабочие режимы моторизованной двери, основываясь на данных датчика временных рядов. Это позволит алгоритму машинного обучения улучшить его способность идентифицировать определённый набор данных датчика временных рядов, соответствующий некоторому нормальному и ненормальному рабочему режиму моторизованной двери. Кроме того, в этом варианте осуществления изобретения этап выполнения контролируемого обучения S2 дополнительно содержит этап использования экспериментальных меток, которые были сгенерированы в экспериментах, чтобы обучать алгоритм S2-2 машинного обучения классифицировать нормальные и ненормальные рабочие режимы моторизованной двери основываясь на данных датчика временных рядов. Другими словами, в этом варианте осуществления изобретения алгоритм машинного обучения дополнительно обеспечивается экспериментальными метками, которые были результатом экспериментов, с целью обучения способности алгоритма машинного обучения выполнять классифицирование. Например, в обученном состоянии, если моторизованная дверь открывается и закрывается N раз правильно, алгоритм машинного обучения будет N раз обрабатывать метку, обозначающую, что N процедур открытия и закрытия выполнены правильно. Иными словами, метки с первого этапа S1 способа, а также из экспериментов, используются для обучения алгоритма машинного обучения классифицировать различные нормальные и ненормальные рабочие режимы, основываясь на необработанных данных датчика.
Кроме того, способ дополнительно содержит этап фильтрации S3 данных датчика временных рядов, основываясь на классификации. Например, в этом варианте осуществления способа, в соответствии с изобретением, данные датчика временных рядов, относящиеся к ненормальному рабочему состоянию моторизованной двери, которое обусловлено воздействием человека на работу двери, отфильтровываются. Более подробно, в этом варианте осуществления изобретения данные датчика временных рядов, которые генерируются в том случае, когда, например, пассажир размещается в дверной раме во время закрытия моторизованной двери, будут отфильтрованы. Следовательно, в этом варианте осуществления изобретения все ненормальные рабочие режимы моторизованной двери, которые учитываются в способе и используются для контроля или прогнозирования, обуславливаются так называемыми аномалиями состояния, такими как, например, износ компонентов двери или уменьшенная смазка червячной передачи привода двери. Иными словами, на третьем этапе S3 способа, основываясь на классификации алгоритма контролируемого обучения, выполненного на втором этапе S2 способа, данные датчика соответствующим образом фильтруются для учёта только желаемых режимов работы.
В этом варианте осуществления изобретения способ дополнительно содержит этап извлечения заданных наборов S4 целевых данных временных рядов из фильтрованных данных временных рядов. В качестве примера, в этом варианте осуществления изобретения первая извлечённая группа наборов целевых данных временных рядов соответственно представляет ток приводного двигателя моторизованной двери во время свободного перемещения моторизованной двери, причём при свободном перемещении моторизованная дверь перемещается с постоянной скоростью. Кроме того, вторая извлечённая группа наборов целевых данных временных рядов представляет рабочие состояния моторизованной двери, например, положение и перемещение двери, соответственно во время этого свободного перемещения моторизованной двери. В этом варианте осуществления изобретения вторая группа наборов целевых данных временных рядов объединяется с первой группой наборов целевых данных временных рядов, для того чтобы интерполировать свободное перемещение моторизованной двери. Следовательно, в этом варианте осуществления изобретения способ позволяет спрогнозировать период времени, после которого некоторые компоненты моторизованной двери будет необходимо заменять, или после которого возникнут другие аномалии состояния, на которые необходимо обратить внимание. Более подробно, время, за которое компоненты, например, такие как петли и шестерня моторизованной двери, или её приводного двигателя, изнашиваются, определяется и обрабатывается алгоритмом машинного обучения, основываясь на увеличении тока двигателя или снижении скорости моторизованной двери во время свободного перемещения в течение процедуры её закрытия или открытия. Однако, другими аномалиями состояния, которые могут быть обнаружены, проконтролированы и/или спрогнозированы также другими вариантами осуществления способов, в соответствии с изобретением, могут быть, например, уменьшение смазки на червячной передаче привода моторизованной двери, чрезмерное трение на рельсе из-за скопления отходов или неправильной установки компонентов моторизованной двери, и т.п. Таким образом, алгоритм машинного обучения обучается прогнозировать время, в течение которого некоторые компоненты моторизованной двери необходимо будет заменять или обслуживать. Иными словами, на четвертом этапе S4 способа используются фильтрованные данные датчика временных рядов для тока двигателя из третьего этапа S3, и извлекаются конкретные признаки. В частности, выясняется, что ток двигателя во время свободного перемещения моторизованной двери является особенно ценным параметром. Это означает, что дверь перемещается с постоянной скоростью после первоначального ускорения и до окончательного замедления. Эта информация может быть интерполирована в сочетании с данными датчика временных рядов в отношении датчика положения.
В этом варианте осуществления изобретения характеристики тока двигателя, такие как ток двигателя во время свободных перемещений, оцениваются как критерий для обучения, контролируются и используются для алгоритма прогнозирования неисправностей. Следовательно, способ в этом варианте осуществления изобретения служит для контроля S5-1, обнаружения S5-2 и прогнозирования S5-3 аномалий при эксплуатации моторизованной двери. Функция контроля S5-1 может, например, использоваться бригадой, обслуживающей поезд, для проверки состояния моторизованной двери, или во время исследования причин неисправностей. Оценивание используется в сочетании с системой обнаружения аномалий, таким образом в сочетании с обнаружением S5-2 аномалий осуществляются предупреждение о проблеме или заказ на ремонт двигателя. Алгоритм прогнозирования неисправностей используется в сочетании с историческими данными о неисправностях, для того чтобы сформировать дополнительный уровень машинного обучения с целью создания прогнозов S5-3 о будущих неисправностях моторизованной двери, основываясь на оценке и/или других источниках данных.
Кроме того, в этом варианте осуществления изобретения алгоритм динамического искажения времени используется на этапе выполнения неконтролируемого обучения, для того чтобы сравнивать друг с другом данные датчика временных рядов. На этапе выполнения неконтролируемого обучения для сравнения данных датчика временных рядов друг с другом также сравниваются между собой различные наборы данных датчика временных рядов, при этом наборы данных датчика временных рядов затем объединяется в кластеры с использованием иерархического алгоритма. Кроме того, идеальная кривая каждого нормального рабочего режима рассчитывается впоследствии как среднее значение, а отдельные данные датчика временных рядов затем сравниваются с идеальной кривой, используя также динамическое искажение времени. Наконец, каждый кластер, связанный с нормальным режимом, затем подаётся на отдельную одноклассовую векторную вычислительную машину для обнаружения новизны, при этом каждая машина считывает последовательность датчиков и оценивает, принадлежит ли она нормальному рабочему режиму. В этом варианте осуществления изобретения, если все машины оценивают последовательность как аномалию, она отмечается как аномальная.
Сущность изобретения состоит в объединении в режиме реального времени информации о функционировании и информации о состоянии моторизованной двери для контроля моторизованной двери, тем самым улучшая качество информации для целей контроля, а также точность прогнозирования, если делаются прогнозы о неисправности(ях).
В этом варианте осуществления изобретения, с точки зрения обслуживания моторизованной двери, важны только так называемые аномалии состояния, которые учитываются алгоритмом машинного обучения способа. Тем не менее, контроль и прогнозы должны учитывать и/или фильтровать реальные факторы эксплуатации.
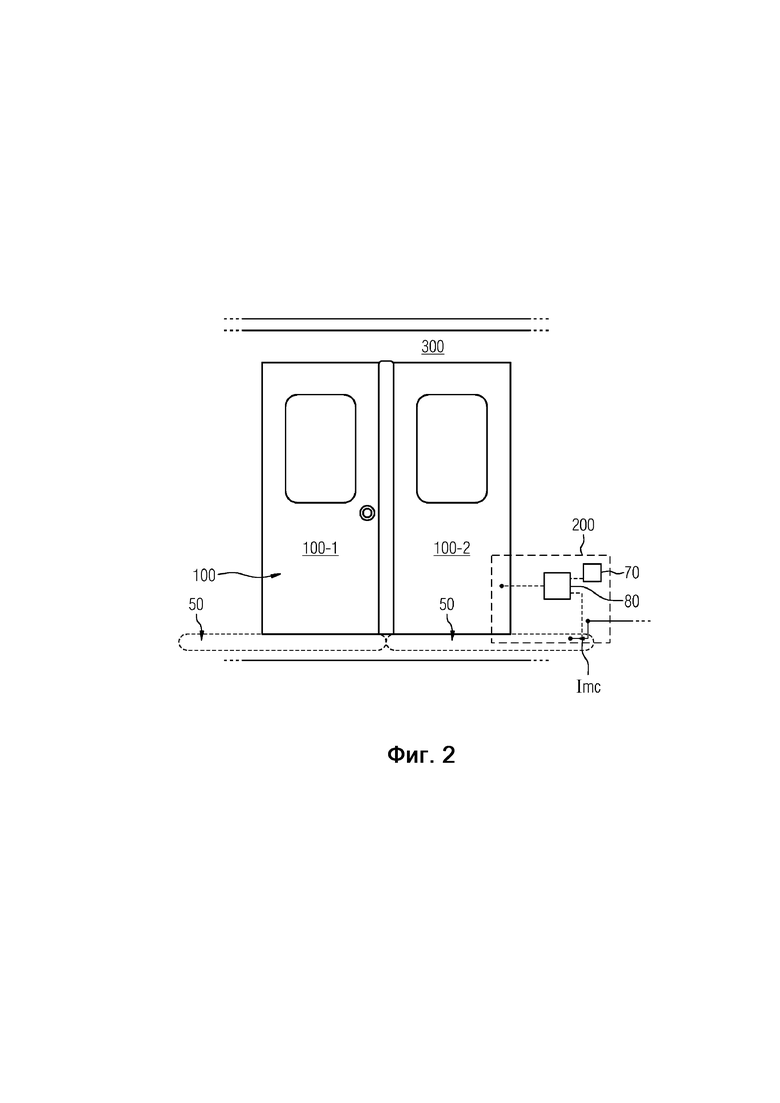
На фиг. 2 показывается вариант осуществления системы 200 контроля для моторизованной двери 100, в соответствии с изобретением. В этом варианте осуществления изобретения моторизованная дверь 100, в качестве примера, является моторизованной дверью 100 поезда 300. Моторизованная дверь 100 содержит первую и вторую створки 100-1 и 100-2, которые могут перемещаться в боковом направлении для открытия и закрытия моторизованной двери 100. Боковое перемещение соответственно первой и второй створки 100-1, 100-2 является возможным благодаря приводному двигателю 50. Система 200 контроля, в качестве примера, содержит множество датчиков 80, в этом варианте осуществления изобретения, выполненных с возможностью определять ток двигателя Imc, текущий от источника питания (не показан) к приводным двигателям 50 моторизованной двери 100. Кроме того, множество датчиков 80 выполняются с возможностью определять рабочее состояние моторизованной двери 100 и обеспечивать данные датчика временных рядов для тока двигателя Imc, а также для рабочего состояния моторизованной двери 100. Система 200 контроля дополнительно содержит модуль 70 машинного обучения, который в этом варианте осуществления изобретения, в качестве примера, соединяется с множеством датчиков 80. В этом варианте осуществления изобретения система 200 контроля, в качестве примера, выполняется с возможностью выполнять способ, как описывалось выше для фиг.1.
В то время как это изобретение было описано во взаимосвязи с тем, что в настоящее время считается практическим иллюстративным вариантом осуществления, следует принимать во внимание, что изобретение не ограничивается раскрытыми вариантами осуществления, а напротив, предназначается для покрытия различных изменений и эквивалентных сборочных узлов, входящих в объём охраны прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система для предупреждения о предстоящих аномалиях в процессе бурения | 2021 |
|
RU2772851C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ДИАГНОСТИРОВАНИЯ ПРОМЫШЛЕННОГО ОБЪЕКТА | 2018 |
|
RU2707423C2 |
| СПОСОБ ОЦЕНКИ НОРМАЛЬНОСТИ ИЛИ НЕНОРМАЛЬНОСТИ ИЗМЕРЕННОГО ЗНАЧЕНИЯ ФИЗИЧЕСКОГО ПАРАМЕТРА ДВИГАТЕЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2686252C2 |
| СПОСОБ И СИСТЕМА КОНЕЧНОГО АВТОМАТА ДЛЯ РАСПОЗНАВАНИЯ РАБОЧЕГО СОСТОЯНИЯ СЕНСОРА | 2018 |
|
RU2744908C1 |
| СПОСОБ КОНТРОЛЯ ПРОИЗВОДСТВЕННЫХ СРЕДСТВ, УСТРОЙСТВО КОНТРОЛЯ ПРОИЗВОДСТВЕННЫХ СРЕДСТВ И СПОСОБ ЭКСПЛУАТАЦИИ ПРОИЗВОДСТВЕННЫХ СРЕДСТВ | 2020 |
|
RU2800300C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ДИАГНОСТИКИ ПРОМЫШЛЕННОГО ОБЪЕКТА НА ОСНОВЕ АНАЛИЗА АКУСТИЧЕСКИХ СИГНАЛОВ | 2020 |
|
RU2749640C1 |
| Бортовой аналитический комплекс для транспортных средств | 2022 |
|
RU2787310C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2816667C1 |
| НЕЗАВИСИМАЯ ОТ ДАТЧИКА ИДЕНТИФИКАЦИЯ НЕИСПРАВНОСТИ МЕХАНИЧЕСКОГО СТАНКА | 2020 |
|
RU2795745C1 |
| Компьютерно-реализуемый способ мониторинга и обработки данных для распознавания и классификации аномалий в работе установок и оптимизации их технического обслуживания и система для выполнения данного способа | 2021 |
|
RU2829543C1 |
Группа изобретений относится к контролю моторизованной двери. Способ предотвращения неисправностей при эксплуатации моторизованной двери заключается в следующем. Датчик обеспечивает данные датчика временных рядов для переменной моторизованной двери. При этом данные датчика временных рядов используются для машинного обучения с целью контроля, обнаружения и/или прогнозирования аномалий при эксплуатации моторизованной двери. При этом способ содержит этап выполнения неконтролируемого обучения рабочим режимам моторизованной двери с использованием данных датчика временных рядов. Также заявлена система контроля для моторизованной двери. Технический результат заключается в обеспечении эффективного предотвращения неисправностей при эксплуатации моторизованной двери. 2 н. и 12 з.п. ф-лы, 2 ил.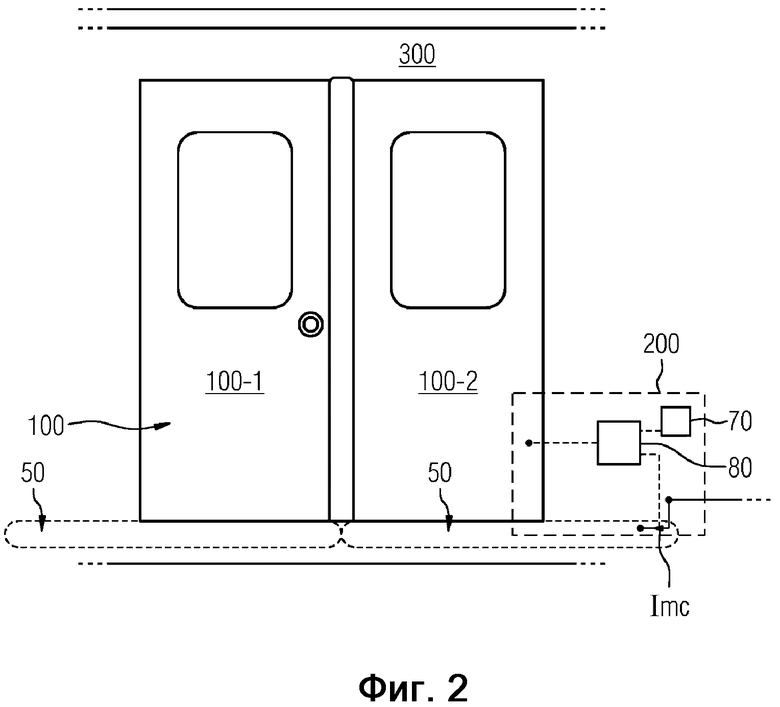
1. Способ предотвращения неисправностей при эксплуатации моторизованной двери (100), содержащий
- по меньшей мере один датчик (80), выполненный с возможностью обеспечивать данные датчика временных рядов для по меньшей мере одной переменной моторизованной двери (100),
- при этом данные датчика временных рядов используются для машинного обучения с целью контроля (S5-1), обнаружения (S5-2) и/или прогнозирования (S5-3) аномалий при эксплуатации моторизованной двери (100), отличающийся тем, что
способ содержит этап выполнения неконтролируемого обучения (S1) рабочим режимам моторизованной двери (100) с использованием данных датчика временных рядов.
2. Способ по п. 1, в котором машинное обучение осуществляется нейронной сетью.
3. Способ по п. 2, в котором нейронная сеть является свёрточно-рекуррентной нейронной сетью.
4. Способ по любому из предыдущих пунктов, в котором по меньшей мере одна переменная содержит ток (Imc) приводного двигателя (50) моторизованной двери (100) и/или рабочее состояние моторизованной двери (100).
5. Способ по п. 1, в котором на этапе выполнения неконтролируемого обучения (S1) алгоритм динамического искажения времени используется для сравнения данных датчика временных рядов друг с другом.
6. Способ по п. 1 или 5, в котором этап выполнения неконтролируемого обучения (S1) содержит этапы:
- извлечения (S1-1) различных наборов данных датчика временных рядов, относящихся соответственно к нормальным и/или ненормальным рабочим режимам моторизованной двери (100);
- генерации меток (S1-2) для извлечённых соответственно различных наборов данных датчика временных рядов.
7. Способ по любому из пп. 1-6, дополнительно содержащий этап выполнения контролируемого обучения (S2) рабочим режимам моторизованной двери (100) с использованием данных датчика временных рядов.
8. Способ по п. 6 или 7, в котором машинное обучение выполняется с помощью алгоритма машинного обучения и в котором этап выполнения контролируемого обучения (S2) содержит этап:
- использования сгенерированных меток (S2-1), чтобы обучать алгоритм машинного обучения классифицировать нормальные и/или ненормальные рабочие режимы моторизованной двери (100), основываясь на данных датчика временных рядов.
9. Способ по п. 7 или 8, в котором этап выполнения контролируемого обучения (S2) содержит этап:
- использования экспериментальных меток (S2-2), которые были сгенерированы в экспериментах, чтобы обучать алгоритм машинного обучения классифицировать нормальные и/или ненормальные рабочие режимы моторизованной двери (100), основываясь на данных датчика временных рядов.
10. Способ по п. 8 или 9, в котором способ дополнительно содержит этап фильтрации (S3) данных датчика временных рядов, основываясь на классификации.
11. Способ по п. 10, в котором во время этапа фильтрации (S3) данные датчика, относящиеся к заданным нормальным и/или ненормальным рабочим режимам моторизованной двери (100), отфильтровываются.
12. Способ по п. 10 или 11, в котором способ дополнительно содержит этап извлечения заданных наборов (S4) целевых данных временных рядов из фильтрованных данных датчика временных рядов.
13. Способ по п. 12, в котором первая группа наборов целевых данных временных рядов представляет соответственно ток приводного двигателя (50) моторизованной двери (100) во время свободного перемещения моторизованной двери (100), при этом во время свободного перемещения моторизованная дверь (100) перемещается с постоянной скоростью.
14. Система (200) контроля для моторизованной двери (100), выполненная с возможностью выполнять способ по любому из пп. 1-13.
| Система сепарации газа от нефти | 1984 |
|
SU1233898A1 |
| US 2016116378 A1, 28.04.2016 | |||
| АДАПТИВНОЕ ДИСТАНЦИОННОЕ ОБСЛУЖИВАНИЕ ПОДВИЖНЫХ СОСТАВОВ | 2011 |
|
RU2540830C2 |
| Устройство для включения и выключения цепей постоянного тока | 1947 |
|
SU81933A1 |

