Изобретение относится к области ультразвукового высокоскоростного контроля дефектов в твердых телах, может преимущественно использоваться для обнаружения дефектов в рельсах железнодорожного транспорта, метрополитена и т.п., в частности, в области болтовых стыков рельсов, при высоких скоростях перемещения дефектоскопических средств.
Требование увеличения пропускных способностей рельсового транспорта оставляет меньше времени на контроль состояния рельсов и устранение выявленных в них дефектов. Поэтому создание надежных способов высокоскоростного контроля рельсов представляет собой актуальную задачу.
Известен [1] способ ультразвукового (УЗ) зондирования области отверстий болтового стыка рельса, заключающийся в подаче в рельс ультразвуковых зондирующих сигналов электроакустическим преобразователем, получении приемными электроакустическими преобразователями из рельса отраженных ультразвуковых сигналов, совместной оценке их, по результатам которой средствами обработки судят о наличии дефекта в виде трещин вокруг болтового отверстия. Сущность способа состоит в том, что предполагаемую область дефекта зондируют под разными углами.
Известен способ ультразвукового (УЗ) зондирования зоны болтового стыка [2], заключающийся в излучении с поверхности катания рельса зондирующих УЗ сигналов электро-акустическими преобразователями (ЭАП) под острыми (порядка 45°) углами и приеме ими отраженных эхо-сигналов сигналов. Способ [1] предназначен для обнаружения самих отверстий, например, для координатной привязки дефектоскопа к рельсовому пути, а также для обнаружения дефектов в виде трещин вокруг отверстий, дополнительных сверлений и т.п.
Недостатком [1] и [2] способов является их непригодность для высокоскоростной дефектоскопии. Для пояснения рассмотрим подробнее процесс УЗ зондирования рельса. УЗ ЭАП является двунаправленным устройством, поэтому он обычно решает, как задачи излучения зондирующих, так и приема отраженных сигналов, переключаясь между режимами и образуя цикл излучения/приема. Во избежание нежелательного взаимовлияния нескольких зондирующих и отраженных сигналов очередной цикл начинают после окончания предыдущего. В случае рельсов период излучения зондирующих сигналов ЭАП не может быть меньше времени распространения УЗ сигнала, излученного ЭАП до подошвы рельса и обратно, а именно 250 мкс. Нормативные документы Российских железных дорог (РЖД) требуют 5 мм дискретности измерений дефектов в рельсах. При высоких скоростях перемещения ЭАП, например, 120 км/час ЭАП за 250 мкс. перемещается на 10 мм, что не удовлетворяет предъявленным требованиям.
Наиболее близким к заявляемому является способ высокоскоростного УЗ зондирования рельсов [3], заключающийся в подаче в рельс ультразвуковых зондирующих сигналов несколькими излучающими однонаправленными, наклонными электроакустическими преобразователями, получении ими отраженных ультразвуковых сигналов, совместной оценке их средством обработки, по результатам которой судят о наличии дефекта
Идея способа [3] заключается в том, что УЗ зондирование осуществляется одновременно несколькими (основным и дополнительными) ЭАП. Расстояние между ними выбирается из соотношения L=(2n-1)N, где N - шаг сканирования, a n - натуральные числа от 3 до 100. Требуемая дискретность (5 мм) обеспечивается тем, что ЭАП разнесены так, чтобы точки зондирования по длине рельса отличались на 5 мм. Например, если основной ЭАП зондировал рельс из точки А, то дополнительный ЭАП, пройдя расстояние L должен выполнить зондирование из точки (А ± 5 мм). Исключение взаимовлияния УЗ сигналов достигается пространственным разнесением основного и дополнительных ЭАП, т.е. каждый ЭАП принимает отраженные УЗ сигналы только от своих зондирующих сигналов.
Недостатки способа [3] заключается в следующих обстоятельствах:
Сложность конструктивного исполнения. При больших значениях n ЭАП оказываются разнесенными на значительные расстояния (до метра). Возможность конструктивного исполнения такого искательного УЗ блока представляется сомнительной.
Низкая точность измерений, обусловленная двумя обстоятельствами:
- требуемая дискретность зондирования (5 мм) при фиксированном относительном положении основного и дополнительных ЭАП и одновременном зондировании реализуемо только при фиксированных скоростях их перемещения. Точное поддержание таких скоростей не реализуемо;
- для простоты технической реализации искательного блока целесообразно разместить основной и дополнительные ЭАП рядом друг с другом, например, при n=3. Размеры ЭАП для УЗ зондирования рельсов обычно составляют около 10 мм, а сами ЭАП размещаются на расстоянии 20-25 мм. В этом случае на первый план выходит проблема взаимовлияния зондирующих и отраженных сигналов. Действительно, одновременное излучение основным и дополнительным ЭАП, расположенными на разных расстояниях от возможного дефекта, приводит к возникновению двух зондирующих сигналов с небольшой задержкой. Сигналы, отраженные от возможного дефекта, из-за достаточно широкой диаграммы направленности поступают как на основной, так и дополнительный ЭАП, т.е. возникают перекрестные связи (основной - дополнительный, дополнительный - основной ЭАП), эти сигналы сложно оценить корректно.
Задачей заявляемого способа является повышение точности высокоскоростной УЗ дефектоскопии, решаемой за счет устранения взаимовлияния каналов зондирования.
Техническим результатом реализации заявляемого способа является повышение достоверности обнаружения и точности оценки дефектов при высокоскоростной УЗ дефектоскопии.
Для достижения этого результата в способе высокоскоростного ультразвукового контроля рельсов, заключающемся в подаче в рельс ультразвуковых зондирующих сигналов несколькими однонаправленными, наклонными электроакустическими преобразователями, получении ими отраженных ультразвуковых сигналов, совместной оценке их средством обработки, по результатам которой судят о наличии дефекта, моменты излучения электроакустических преобразователей выбирают так, чтобы ультразвуковые зондирующие сигналы от них поступали к предполагаемому дефекту одновременно.
Идея заявляемого способа состоит в том, что зондирующие сигналы от всех ЭАП (основного и дополнительных в терминах прототипа) поступают к предполагаемому дефекту одновременно. В результате:
В качестве зондирующего используется суммарный УЗ сигнал нескольких ЭАП - SΣ. Таким образом, указанные ЭАП образуют УЗ линейную систему, направляющую зондирующие сигналы в область ожидаемого дефекта.
Каждый ЭАП принимает лишь один сигнал, отраженный - от суммарного сигнала SΣ, которые отличаются временем поступления, но это различие легко устраняется средствами обработки отраженных сигналов.
Далее будем рассматривать простейший вариант - при наличии двух ЭАП.
Заявляемый способ иллюстрируют следующие графические материалы:
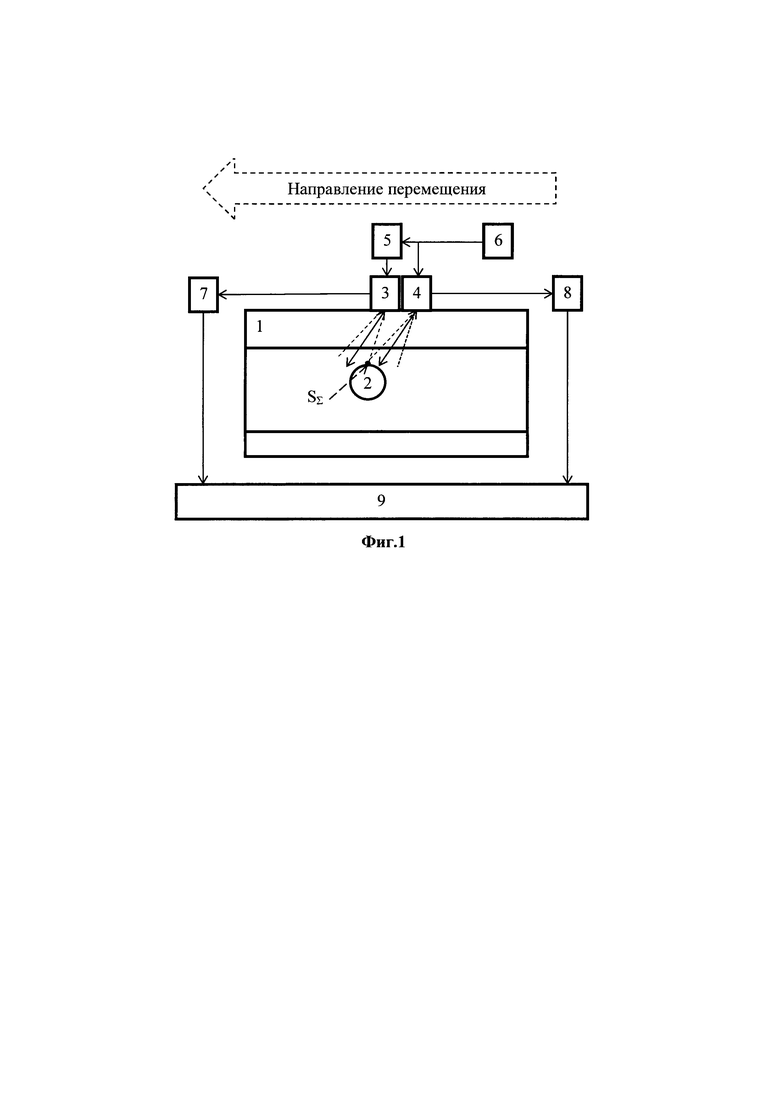
Фиг. 1 - Структурная схема устройства высокоскоростного ультразвукового контроля рельсов, в случае наличия основного и одного дополнительного ЭАП, где:
1. Рельс.
2. Болтовое отверстие.
3. ЭАП.
4. Дополнительный ЭАП.
5. Устройство задержки зондирующего сигнала на Δt.
6. Формирователь зондирующего сигнала.
7. Приемник отраженного сигнала от ЭАП 3.
8. Приемник отраженного сигнала от ЭАП 4.
9. Средство обработки.
Фиг. 2 - Временная диаграмма сигналов ЭАП 3 и 4.
Рассмотрим назначение элементов.
Рельс 1 с болтовым отверстием 2 являются объектами дефектоскопии.
ЭАП 3 и 4 предназначены для излучения зондирующих и приема отраженных УЗ сигналов (переключатели излучения/приема ЭАП на Фиг. 1 не показаны с целью упрощения).
Устройство задержки 5 предназначено для задержки на Δt зондирующих УЗ сигналов ЭАП 4, по отношению к зондирующим УЗ сигналам ЭАП 3, так, чтобы они поступили к объекту зондирования (болтовому отверстию 2) одновременно, формируя общий УЗ зондирующий сигнал SΣ.
Формирователь зондирующего сигнала 6 вырабатывает электрические сигналы, которые ЭАП 3 и 4 преобразуют в УЗ зондирующие сигналы.
Приемники электрических сигналов 7 и 8, сформированных по отраженным от предполагаемого дефекта УЗ сигналов соответственно ЭАП 3 и 4 подаются на средство обработки 9.
Средство обработки 9 может быть реализовано в виде микрокомпьютера семейства ARM.
Рассмотрим возможность реализации заявляемого способа.
На рельс 1 устанавливают основной 3 и дополнительный ЭАП 4 при минимальном расстоянии между ними (20…25 мм). В качестве предполагаемого дефекта будем рассматривать болтовое отверстие 2. Такой выбор обусловлен следующими обстоятельствами:
болтовое отверстие 2 является наиболее сложным объектом дефектоскопии;
расположение болтового отверстия 2 посредине рельса 1 приводит к фокусировке зондирующих УЗ сигналов от всех ЭАП (3 и 4) на нем. В результате возможные дефекты, расположенные выше или ниже болтового отверстия 2, в той или иной степени, подвергаются совместному зондированию и обнаружению предполагаемых дефектов.
С целью упрощения описания рассмотрим случай использования двух ЭАП, имеющих одинаковое направление излучения и приема Фиг. 1. ЭАП 3 и 4 имеют одинаковые диаграммы направленности, показанные пунктиром.
Формирователь 6 вырабатывает электрический зондирующий сигнал Sэ, который ЭАП 4 в момент времени t0 преобразует в УЗ зондирующий сигнал SЗ4, Фиг. 2.
Устройство 5 задерживает Sэ на интервал Δt, в результате в момент времени t2 ЭАП 3 формирует УЗ зондирующий сигнал SЗ3. Величина Δt выбирается так, чтобы SЗ3 и SЗ4 с учетом диаграммы направленности поступили к объекту исследования 2 одновременно в момент времени t2 в виде УЗ сигнала SΣ.
Сигналы SЗ3 и SЗ4 находятся не на максимуме диаграммы направленности каждого ЭАП, но в сумме обладают большей амплитудой по сравнению с одиночным ЭАП. Такой подход позволяет свести многоточечное зондирование к одноточечному.
После излучения ЭАП 3 и 4 переключаются в режим приема отраженных УЗ сигналов.
УЗ сигналы SO3 и SO4, отраженные от предполагаемого дефекта 2 поступают в моменты времени t3 и t4 на ЭАП 3 и 4 соответственно. Указанные сигналы преобразуются ЭАП в электрические и подаются на приемники 7 и 8 соответственно, где преобразуются в цифровую форму и обрабатываются в средстве обработки 9 (компьютером).
Задержка между отраженными сигналами SO3 и SO4 легко компенсируется цифровыми средствами обработки 9, в результате чего удается обработать суммарный отраженный УЗ сигнал.
При совместном движении ЭАП 3 и 4 вдоль рельса и периодическом зондировании точка исследования перемещается, обеспечивая заданное разрешение по длине рельса.
При необходимости повысить допустимую скорость дефектоскопии требуется установить большее количество ЭАП. При этом каждый ЭАП (кроме одного) снабжается собственной задержкой 5 с сохранением общего принципа: зондирующие сигналы должны поступать к объекту зондирования одновременно, формируя SΣ. Напомним, что в противном случае зондирующий сигнал SЗ каждого ЭАП вызовет отраженный сигнал SO, который будет принят не только им, но и другими ЭАП. В результате различить отраженные сигналы практически невозможно.
Если направления излучения ЭАП не совпадают с направлением перемещения дефектоскопа, то на фиг. 1 задержка 5 должна устанавливаться у ЭАП 4.
Таким образом, заявляемый способ может быть реализован и позволяет проводить дефектоскопию на высоких скоростях.
Источники информации
1. Патент RU 2052808.
2. Марков А.А., Кузнецова Е.А. Дефектоскопия рельсов. Формирование и анализ сигналов. Книга 2. Расшифровка дефектограмм (практическое пособие в двух книгах. - Санкт-Петербург.: Ультра Принт, 2014. - 332 с, стр. 23.
3. Патент RU 2440568.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ высокоскоростной ультразвуковой дефектоскопии длинномерных объектов | 2021 |
|
RU2756933C1 |
| СПОСОБ ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ | 2010 |
|
RU2446971C2 |
| УСТРОЙСТВО ОТОБРАЖЕНИЯ РЕЛЬСОВОГО ДЕФЕКТОСКОПА | 2015 |
|
RU2582298C1 |
| СПОСОБ ОЦЕНКИ ДЕФЕКТА В ГОЛОВКЕ РЕЛЬСА | 2011 |
|
RU2466386C1 |
| СПОСОБ ОЦЕНКИ ДЕФЕКТА В ГОЛОВКЕ РЕЛЬСА | 2007 |
|
RU2340495C1 |
| Способ обнаружения дефектов в рельсах | 2018 |
|
RU2668941C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ГОЛОВКИ РЕЛЬСА | 2006 |
|
RU2308027C1 |
| Ультразвуковой способ обнаружения и оценки сварных стыков рельсов при высокоскоростном контроле | 2021 |
|
RU2764571C1 |
| Способ динамической корректировки чувствительности дефектоскопических средств при высокоскоростном контроле длинномерных объектов | 2021 |
|
RU2774096C1 |
| Способ оценки работоспособности искательной системы дефектоскопических средств при высокоскоростном контроле рельсов | 2021 |
|
RU2758403C1 |

Использование: для высокоскоростного ультразвукового контроля рельсов. Сущность изобретения заключается в том, что подают в рельс ультразвуковые зондирующие сигналы несколькими однонаправленными наклонными электроакустическими преобразователями, получают ими отраженные ультразвуковые сигналы, выполняют совместную оценку их средством обработки, по результатам которой судят о наличии дефекта, при этом моменты излучения электроакустических преобразователей выбирают так, чтобы ультразвуковые зондирующие сигналы от них поступали к предполагаемому дефекту одновременно. Технический результат: повышение достоверности обнаружения и точности оценки дефектов при высокоскоростной ультразвуковой дефектоскопии рельсов. 2 ил.
Способ высокоскоростного ультразвукового контроля рельсов, заключающийся в подаче в рельс ультразвуковых зондирующих сигналов несколькими однонаправленными наклонными электроакустическими преобразователями, получении ими отраженных ультразвуковых сигналов, совместной оценке их средством обработки, по результатам которой судят о наличии дефекта, отличающийся тем, что моменты излучения электроакустических преобразователей выбирают так, чтобы ультразвуковые зондирующие сигналы от них поступали к предполагаемому дефекту одновременно.
| СПОСОБ ВЫСОКОСКОРОСТНОГО СПЛОШНОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ РЕЛЬСОВ | 2010 |
|
RU2440568C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ СВАРНЫХ СТЫКОВ РЕЛЬСОВ | 2005 |
|
RU2309402C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СВАРНОГО СТЫКА РЕЛЬСОВ | 2006 |
|
RU2308029C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ПОДОШВЫ РЕЛЬСА | 2007 |
|
RU2353924C1 |
| WO 8203920 A1, 11.11.1982 | |||
| US 4174636 A, 20.11.1979. | |||

