Заявленное изобретение относится к конструкции автоматической станции зарядки и обслуживания многовинтовых беспилотных летательных аппаратов и многовинтового беспилотного летательного аппарата, работающего совместно с ней, и может быть использовано для создания сети обслуживания БПЛА, что позволит выполнять различные задачи с использованием БПЛА, дальность полета которых ограничена емкостью аккумулятора.
Зарядка аккумулятора и обслуживание БПЛА в автоматическом режиме требуют точного позиционирования и ориентации БПЛА на посадочной платформе. Неопределенность позиционирования возникает вследствие неточности работы системы управления процессом посадки и таких погодных факторов, как порывистый ветер, туман, снег, дождь, которые как правило ухудшают процесс наведения или вводят неточности в последний момент посадки БПЛА, когда система управления уже не в состоянии провести корректировки местоположения садящегося аппарата с необходимой точностью.
Известны автоматические станции зарядки и обслуживания БПЛА, в которых после посадки на платформу производится корректировка его местоположения каким-либо активным устройством (манипулятором). Автоматическая станция, согласно заявке US 2014/0124621 А1, принимает БПЛА на плоскую посадочную платформу. После посадки БПЛА механизм выравнивания перемещает четырьмя планками БПЛА в зону позиционирования, в которой осуществляется зарядка, замена аккумулятора или иной вид обслуживания. Для лучшего обслуживания БПЛА может дополнительно фиксироваться специальным устройством или механизмом выравнивания.
Автоматическая станция, согласно заявке US 2014/0319272 А1, также принимает БПЛА на плоскую посадочную платформу, однако после этого БПЛА с помощью двух планок выводит аппарат их зоны посадки в зону зарядки и обслуживания. Данные устройства имеют возможность принимать БПЛА обычной конструкции, которые способны приземлиться на любую поверхность, однако конструкция станции получается сложной.
Известны автоматические станции зарядки и обслуживания БПЛА, содержащие пассивные устройства позиционирования БПЛА при приземлении. Конструкция устройства позиционирования, как правило, рассчитана на данный тип БПЛА. Сам БПЛА имеет возможность приземления как на данную станцию, так и любую другую горизонтальную поверхность. Автоматическая станция, согласно патенту US 9,139,310 В1, содержит конические углубления на посадочной платформе по местам расположения шасси БПЛА. Данная конструкция позиционирует БПЛА, если отклонение от точки посадки не более радиуса конуса в верхней части. Данная конструкция способна принимать аппараты с таким же расположением шасси.
Доставочная платформа для беспилотных транспортных средств, согласно US 2015/ 0175276 А1, имеет выступающий над посадочной поверхностью усеченную пирамиду основание, которой равно расстоянию посадочных лыж БПЛА. При посадке взаимодействие опорных лыж БПЛА и пирамиды приводит к необходимому позиционированию.
Посадочная платформа для БПЛА, согласно US D805,018 S, выполнена по размеру расположения опор БПЛА и имеет вокруг наклонные поверхности. После посадки БПЛА скатывается по этим поверхностями позиционируется на посадочной платформе. Указанные конструкции станции, как правило, не содержат устройств удержания аппарата на посадочной платформе.
Известны автоматические станции зарядки и обслуживания БПЛА, содержащие пассивные устройства позиционирования БПЛА при приземлении, в которых конструкция устройства позиционирования рассчитана на данный тип посадочного устройства БПЛА. Сам БПЛА имеет посадочное устройство, рассчитанное на взаимодействие с устройством позиционирования станции, и поэтому аппарат, как правило, не имеет возможность приземления на другие устройства или горизонтальную поверхность. Посадочное устройство БПЛА, согласно US 9,499,265 В2, содержит посадочную платформу в виде конического углубления, в котором установлены контакты для зарядки аккумулятора, сменный аккумулятор и другие устройства. БПЛА имеет кольцевую опору, от которой поднимаются ножки, образующие каркас направленной острием вниз усеченной пирамиды. Точность позиционирования при посадке обеспечивается взаимодействием кольцевой опоры и ножек с коническим углублением. Позиционирование по вертикальной оси вращения достигается вращением опорной поверхности посадочной платформы вокруг вертикальной оси. Источник предусматривает возможность выполнения посадочной праформы в виде многоугольника. В этом случае опора БПЛА должна иметь ту же форму, и это позволяет обеспечить нужную ориентацию без вращения опорной поверхности посадочной платформы.
Система стыковки с воздушным транспортным средством US 9,561,871 В2 включает в себя посадочную площадку и воздушное транспортное средство. У посадочной площадки имеется опускающаяся к центру коническая поверхность. В центре имеется углубление по размерам посадочной поверхности воздушного транспортного средства. В воздушном транспортном средстве имеется посадочная поверхность с колесами. Выступ и посадочное устройство размещены на нижней поверхности воздушного судна. После посадки на коническую поверхность воздушное транспортное средство скатывается к центру, и ее посадочная поверхность опускается в центральное углубление. На воздушном транспортном средстве и посадочной площадке имеются контакты для подачи напряжения для зарядки аккумулятора, которые контактируют между собой.
Известно также посадочное устройство БПЛА, согласно US 2016/ 00395.41 А1, которое содержит посадочную площадку, выполненную в виде короны, посадочное устройство БПЛА в виде двух расположенных накрест стержней. Во впадинах размещены контакты для подачи зарядного напряжения, на посадочных стержнях размещены ответные контакты. Посадочная платформа имеет механизмы для фиксации посадочных стержней. На посадочной платформе содержатся источники излучения, на БПЛА видеокамера или датчики излучения. БПЛА подлетает к посадочному устройству и садится, ориентируясь на расположенные на нем источники излучения. Неточность посадки, которая может быть вызвана неточностью работы системы посадки или порывами ветра, нивелируется при взаимодействии поверхности посадочной площадки и посадочных стержней БПЛА за счет пассивного гравитационного центрирования. Устройства данного типа достаточно просты и обеспечивают наилучшее взаимодействие системы посадочная платформа - БПЛА, однако сам БПЛА имеет посадочное устройство, рассчитанное на взаимодействие только со своей станцией, и не имеет возможность приземления на другие устройства или горизонтальную поверхность.
Наиболее близким аналогом (прототипом) заявленной автоматической станции зарядки и обслуживания беспилотных летательных аппаратов по мнению заявителя является автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов и беспилотный летательный аппарат, работающий совместно с ней, известная из патента RU2721048, опубл. 15.05.2020. Автоматическая станция содержит посадочную платформу с посадочными огнями или маркерами, контакты подачи напряжения, блок питания и блок управления. Посадочная платформа выполнена в виде полого многогранника, внутренняя поверхность которого повторяет наружную поверхность, с количеством вершин, равным количеству шасси БПЛА. Посадочная платформа установлена на опорах или держателе, на которые установлен по крайней мере один вибратор. БПЛА содержит корпус, лучи с двигателями и воздушными винтами, аккумулятор, контакты для подачи напряжения и шасси, выполненные подвижными, имеющие положение «на земле», при котором шасси установлены вертикально вниз, «полетное» положение, при котором шасси разнесены максимально в стороны. Шасси имеют положение «взлета/посадки», при котором шасси сведены вниз к центру с образованием обращенной вниз пирамиды или усеченной пирамиды, а также положение, при котором шасси раздвинуты до касания нижней поверхности посадочной платформы и поджатия ими электрических контактов, находящихся на посадочной платформе и на БПЛА.
Предложенный прототип наиболее близко подходит к решению проблем, решаемых заявленным изобретением, однако, по мнению заявителя проблема решается не самым эффективным способом.
Техническим результатом является ускорение процесса позиционирования БПЛА при посадке и закрытия люка посадочной платформы путем совмещения этих процессов и упрощения конструкции, за счет того, что процесс позиционирования и закрытия люка осуществляется одним приводом.
Технический результат достигается посредствам автоматической станции зарядки и обслуживания беспилотных летательных аппаратов, содержащей корпус, выполненный на боковой стенке корпуса по меньшей мере один люк, крышку люка с установленными в нижней части шарнирными петлями, посадочную площадку и устройство позиционирования БПЛА после приземления.
Автоматическая станция характеризуется тем, что на внутренней стенке крышки люка на опорах установлен лист, содержащий по меньшей мере два отверстия в виде фигуры замкнутого контура, содержащий по меньшей мере один внутренний угол, вершина которого направлена в сторону нижней кромки крышки люка.
В одном из вариантов выполнения боковые стенки отверстий выполнены наклонными.
В одном из вариантов выполнения автоматическая станция содержит по меньшей мере два толкателя.
В одном из вариантов выполнения крышка люка выполнена прямоугольной формы.
В другом варианте выполнения крышка люка выполнена пятиугольной формы.
В другом варианте выполнения шарнирные петли расположены ниже нижней кромки крышки люка.
В другом варианте выполнения автоматическая станция содержит по меньшей мере два люка.
В другом варианте выполнения крышка люка содержит установленный в нижней части желоб, который может быть обогреваемым.
В другом варианте выполнения кромки внутреннего угла отверстии, вершина которого направлена в сторону нижней кромки крышки люка выполнены из электропроводного материала и изолированы друг от друга.
В частном варианте выполнения автоматическая станция установлена на основание с возможностью вращения вокруг вертикальной оси.
Сущность изобретения поясняется следующим графическим материалом.
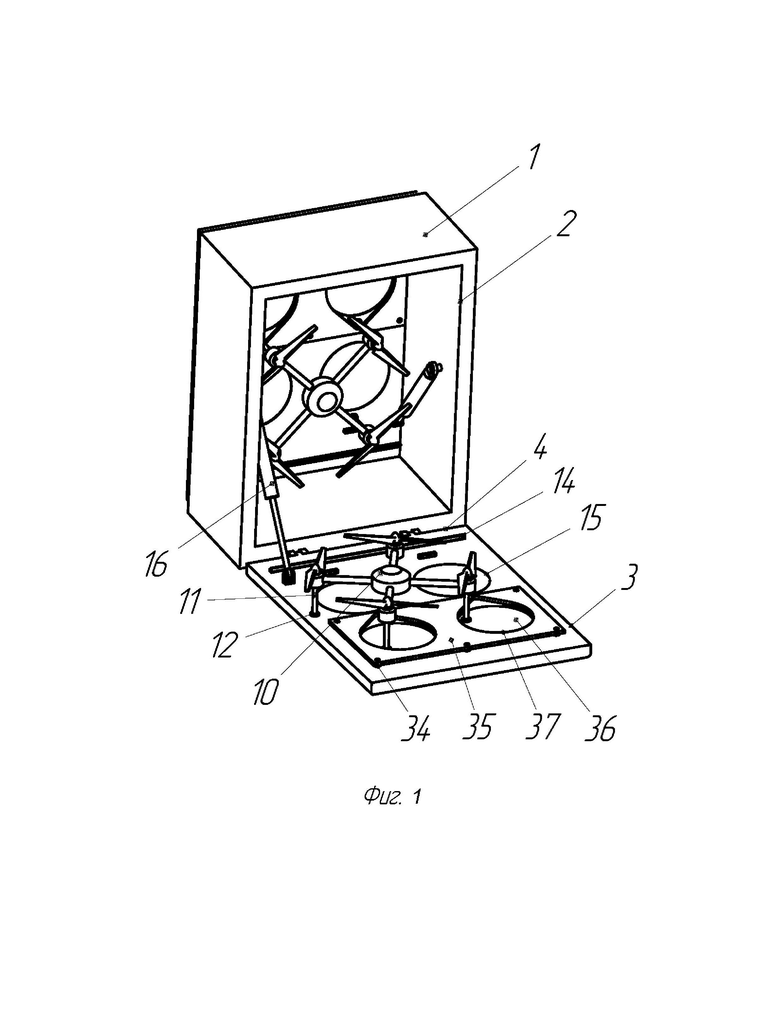
На фиг. 1 изображен вариант исполнения Автоматической станция зарядки и обслуживания беспилотных летательных аппаратов, в котором на внутренней поверхности крышки люка на опорах установлен лист, содержащий по меньшей мере два отверстия в виде фигуры замкнутого контура с, по меньшей мере, одним внутренним углом.
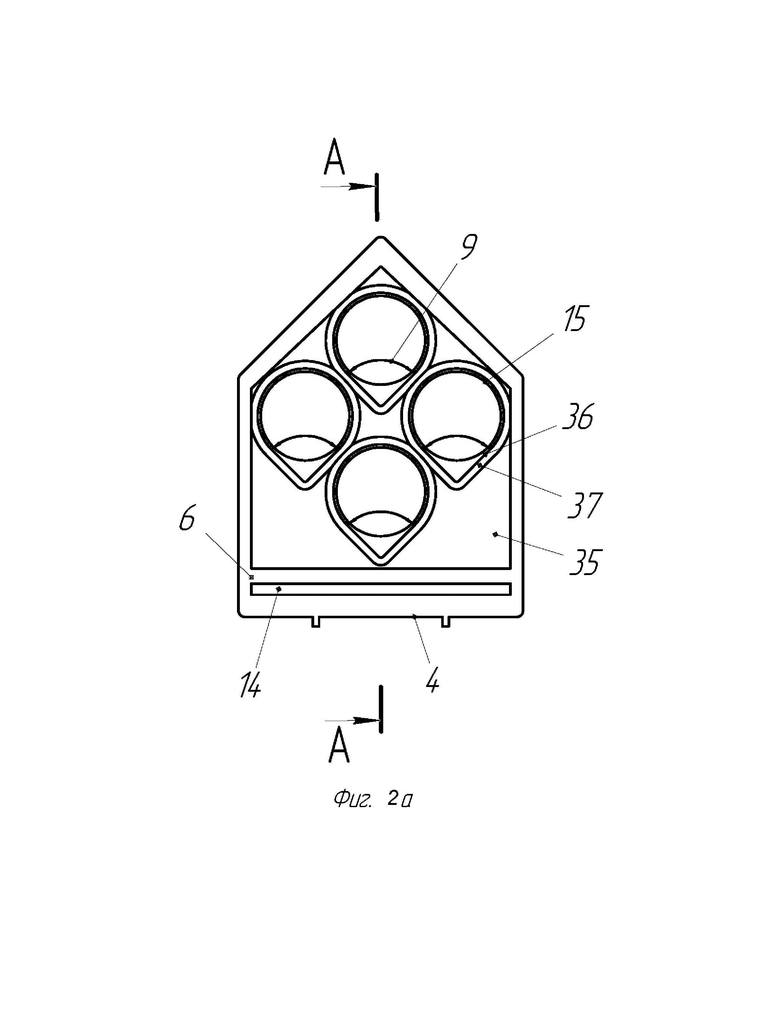
На фиг. 2а изображена крышка люка с листом, закрепленным на внутренней поверхности крышки, отверстия которого выполнены с наклонными боковыми стенками.
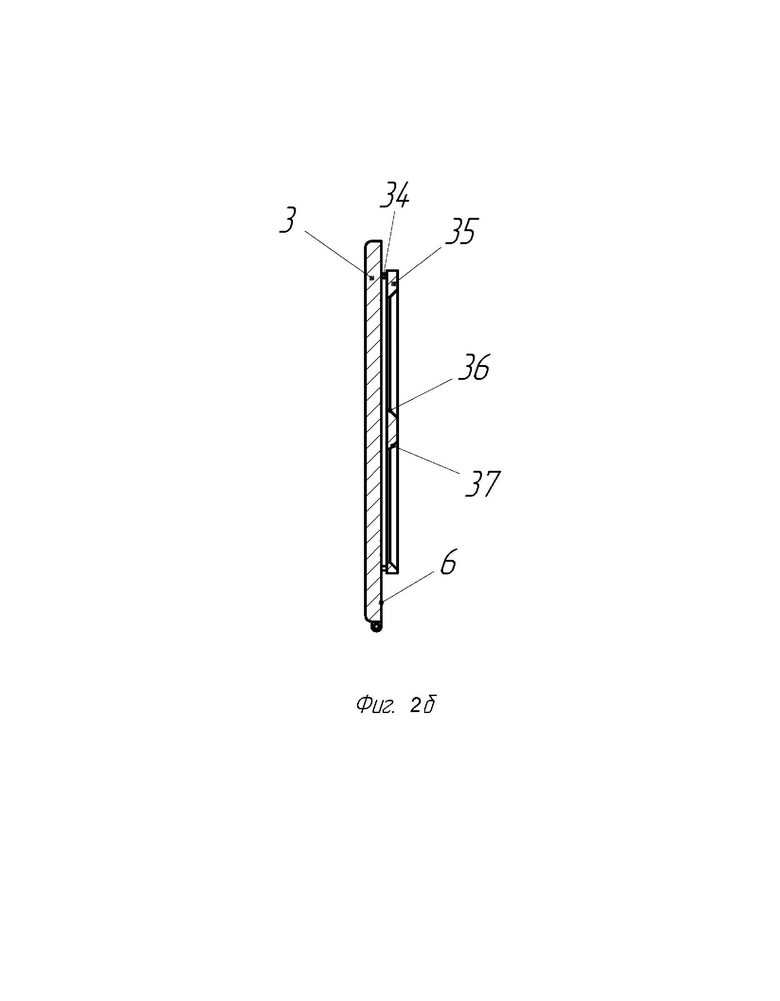
На фиг. 2б представлена крышка фиг. 2а сечение А-А.
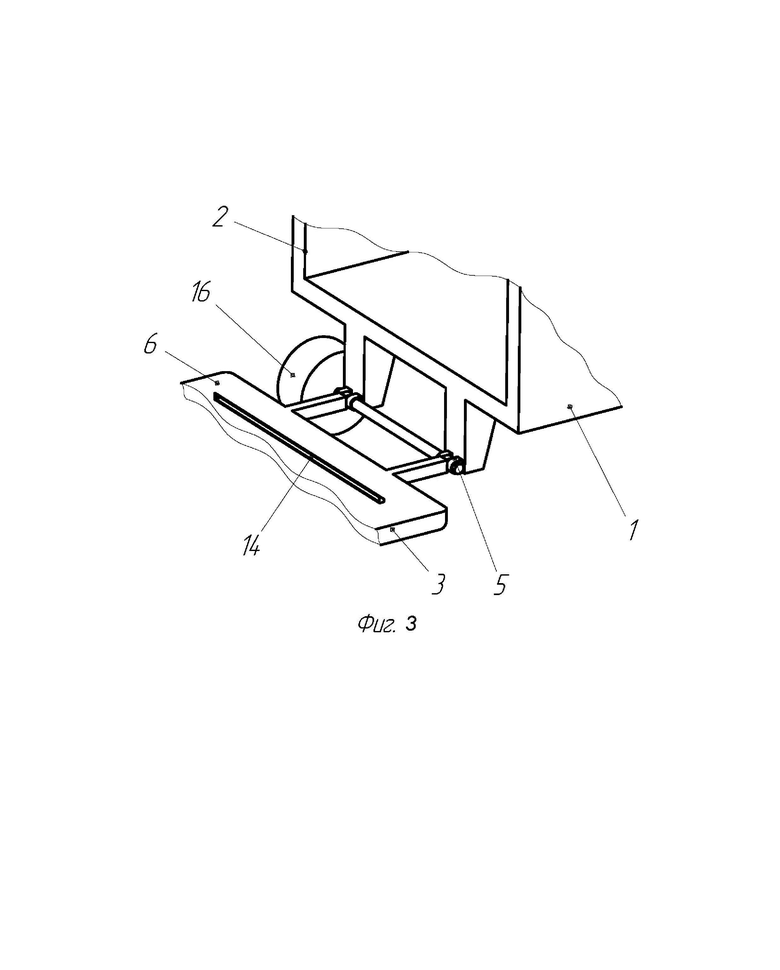
На фиг. 3 изображен механизм открывания и закрывания крышки люка.
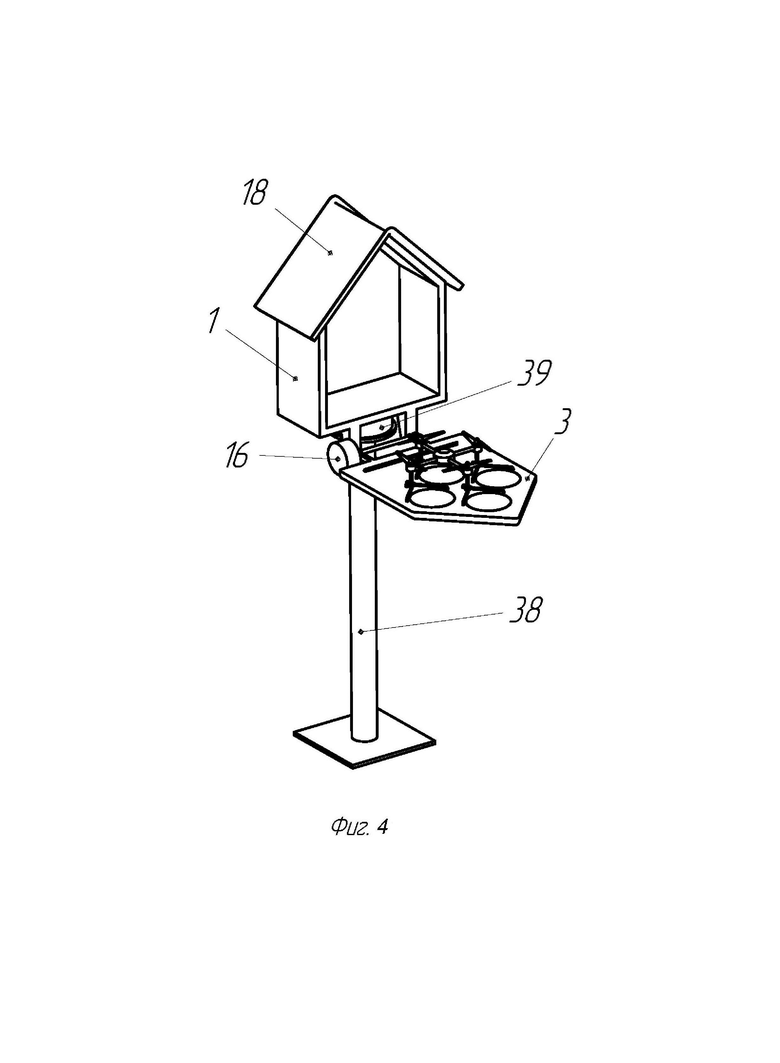
На фиг. 4 изображен вариант исполнения Автоматической станция зарядки и обслуживания беспилотных летательных аппаратов содержащий основание, на которое автоматическая станция установлена, с возможностью вращения вокруг вертикальной оси.
Указанные фигуры иллюстрируют частные случаи реализации и не охватывают или ограничивают весь объем вариантов реализации данного технического решения.
Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов вариант исполнения фиг. 1 содержит корпус 1, выполненный на боковой стенке корпуса люк 2, крышку 3 люка 2 с установленными в нижней части 4 шарнирными петлями 5, на внутренней поверхности 6 крышки 3 люка 2 на опорах 34 установлен лист 35, содержащий по меньшей мере два отверстия 36 в виде фигуры замкнутого контура, содержащий по меньшей мере один внутренний угол 9, вершина которого направлена в сторону нижней кромки крышки люка. При этом расстояние между вершинами внутренних углов 9 равно расстоянию между опорами 11 БПЛА 10.
На фиг. 2а изображена крышка 3 люка 2 с листом 35, закрепленным на внутренней поверхности 6 крышки 3 люка 2, на котором отверстия 36 выполнены с наклонными боковыми стенками 37. Наклонные боковые стенки 37 обеспечивают увеличение зоны приземления 15 опоры 11 БПЛА 10.
На фиг. 2б представлено крепление листа 35, на котором отверстия 36, выполнены с наклонными боковыми стенками 37, к внутренней поверхности 6 крышки 3 люка 2 вид по сеч. А-А фиг. 2а.
На листах 35 на вершинах углов 9 могут быть установлены контакты из электропроводного материала, которые должны быть изолированы друг от друга и подключены к выходу зарядного устройства. Также четыре изолированных контакта могут быть использованы для зарядки аккумулятора и передачи информации на бортовой компьютер БПЛА (два силовых, два информационных канала). Соответственно на опорах 11 БПЛА в зоне контакта с направляющими 8 должны быть размещены кольцевые контакты из электропроводного материала, которые соединены с соответствующими линиями на БПЛА.
Механизм 16 открывания и закрывания крышки 3 люка 2 может быть выполнен в виде гидро-, пневмо- или электроцилиндра, установленного одним концом на корпус 1, другим на крышку 3. Также механизм 16 открывания и закрывания крышки 3 (фиг.3) может быть выполнен в виде привода вращения, на вал которого своими половинками шарниров насажена крышка.
Пульт управления и зарядки аккумулятора 17 содержит управляющий механизмами контроллер и зарядное устройство.
Вариант исполнения автоматической станции фиг. 4 содержит основание 38, на которое установлен привод вращения 39, обеспечивающий поворот корпуса 1 относительно вертикальной оси. Это позволяет ориентировать станцию и выбирать для приземления и взлета БПЛА 10 наиболее удачное положение относительно ветра. Также применена двускатная крыша 18 корпуса 1, на которой не задерживается дождевая вода и снег.
Вариант исполнения фиг. 1 автоматической станции зарядки и обслуживания беспилотных летательных аппаратов работает следующим образом.
В исходном состоянии крышка 3 люка 2 закрыта. Внутри автоматической станции отсутствует БПЛА 10.
БПЛА 10 подлетает к автоматической станции и зависает над станцией.
Автоматическая станция открывает крышку 3 люка 2 для чего выдвигается шток механизма 16 открывания и закрывания, который толкает крышку 3 люк 2 и приводит ее в горизонтальное положение.
БПЛА 10 приземляется на внутреннюю поверхность 6 крышки 3 люка 2 ориентируясь по изображению крышки 3 или установленных на нем маркерам (не показаны). Вследствие ошибок управления и условии окружающей среды (ветер, особенно порывистый, видимость) БПЛА 10 приземляется на внутреннюю поверхность 6 крышки 3 люка 2 не точно. Важно, чтобы опоры 11 БПЛА 10 попали в соответствующие отверстия 36 листа 35 (фиг.1).
После приземления БПЛА 10 автоматическая станция закрывает крышку 3 люка 2 для чего задвигается шток механизма 16 открывания и закрывания который тянет крышку 3 и приводит его в вертикальное положение. При этом в следствии появившегося наклона крышки 3 опоры 11 БПЛА 10 скользят по внутренний поверхности 6 крышки 3, опираются на боковые стенки 37 отверстий 36 листа 35 и скользит по его поверхности до прихода во внутренний угол 9. При этом пятки 12 опор БПЛА 10 заходят под лист 35. Это позволяет удерживать БПЛА 10 от падения при вертикальном положении крышки 3 люка 2. В таком положении происходит хранение, обслуживание (обмен информации) или зарядка аккумулятора БПЛА 10 (фиг.1).
В варианте исполнения (фиг.2а) крышки 3 люка 2 на листе 35, установленном на опорах 34, отверстия 36, выполненные в виде капель с наклонными боковыми стенками 37 (фиг.2б). При приземлении БПЛА 10 опоры 11, попадая на наклонные боковые стенки 37 отверстий 36, соскальзывают на внутреннюю поверхность 6 крышки 3 люка 2. Такое решение расширяет допустимое отклонение при посадке БПЛА 10.
Боковые стенки 37 могут быть выполнены из электропроводного материала, а на опорах 11 БПЛА 10 установлены соответствующие контакты, таким образом, появляется возможность производить зарядку аккумуляторов или обмениваться данными между БПЛА 10 и пультом управления 17.
Вариант исполнения автоматической станции зарядки и обслуживания беспилотных летательных аппаратов фиг. 4 позволяет ориентировать крышку 3 люка 2 по отношению к корпусу 1 в зависимости от направления ветра.
Привод вращения 39, установленный над землей на основании 38, поворачивает автоматическую станцию так что бы корпус 1 автоматической станции не создавал завихрения воздуха в зоне приземления БПЛА 10. Для этого корпус 1 автоматической станции может быть развернут, например, люком 2 к подветренной стороне, или таким образом что бы ветер дул сбоку корпуса 1.
Таким образом, предложенные технические решения позволяют ускорить процесс позиционирования БПЛА и закрытия люка посадочной платформы путем совмещения этих процессов. Такое решение также упрощает конструкцию автоматической станции за счет того, что процесс позиционирования БПЛА и закрытия люка осуществляется одним приводом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов | 2023 |
|
RU2821204C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов и беспилотный летательный аппарат, работающий совместно с ней | 2019 |
|
RU2721048C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| Способ приземления многовинтового БПЛА вертикального взлета и посадки и устройства для его реализации | 2021 |
|
RU2780255C1 |
| Посадочная площадка для многовинтового БПЛА вертикального взлета и посадки (Варианты) | 2021 |
|
RU2770506C1 |
| ПОСАДОЧНАЯ ПЛАТФОРМА ДЛЯ БПЛА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2020 |
|
RU2746538C1 |
| СПОСОБ ЗАРЯДА АККУМУЛЯТОРНЫХ БАТАРЕЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2593207C1 |
| Посадочная платформа для БПЛА вертикального взлета и посадки | 2019 |
|
RU2722249C1 |
| СИСТЕМА ПОДЗАРЯДКИ АККУМУЛЯТОРА ЭЛЕКТРИЧЕСКОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2523420C1 |
| Автономная зарядная станция для беспилотных летательных аппаратов | 2021 |
|
RU2775272C1 |
Изобретение относится к конструкции автоматической станции зарядки и обслуживания многовинтовых беспилотных летательных аппаратов (БПЛА) и многовинтового БПЛА, работающего совместно с ней, и может быть использовано для создания сети обслуживания БПЛА, что позволит выполнять различные задачи с использованием БПЛА, дальность полета которых ограничена емкостью аккумулятора. Автоматическая станция зарядки и обслуживания БПЛА содержит корпус, выполненный на боковой стенке корпуса по меньшей мере один люк, крышку люка с установленными в нижней части шарнирными петлями, посадочную площадку и устройство позиционирования БПЛА. На внутренней стенке крышки люка на опорах установлен лист, содержащий по меньшей мере два отверстия в виде фигуры замкнутого контура, содержащий по меньшей мере один внутренний угол, вершина которого направлена в сторону нижней кромки крышки люка. Техническим результатом является ускорение процесса позиционирования БПЛА при посадке и закрытия люка посадочной платформы путем совмещения этих процессов и упрощения конструкции, за счет того, что процесс позиционирования и закрытия люка осуществляется одним приводом. 9 з.п. ф-лы, 5 ил.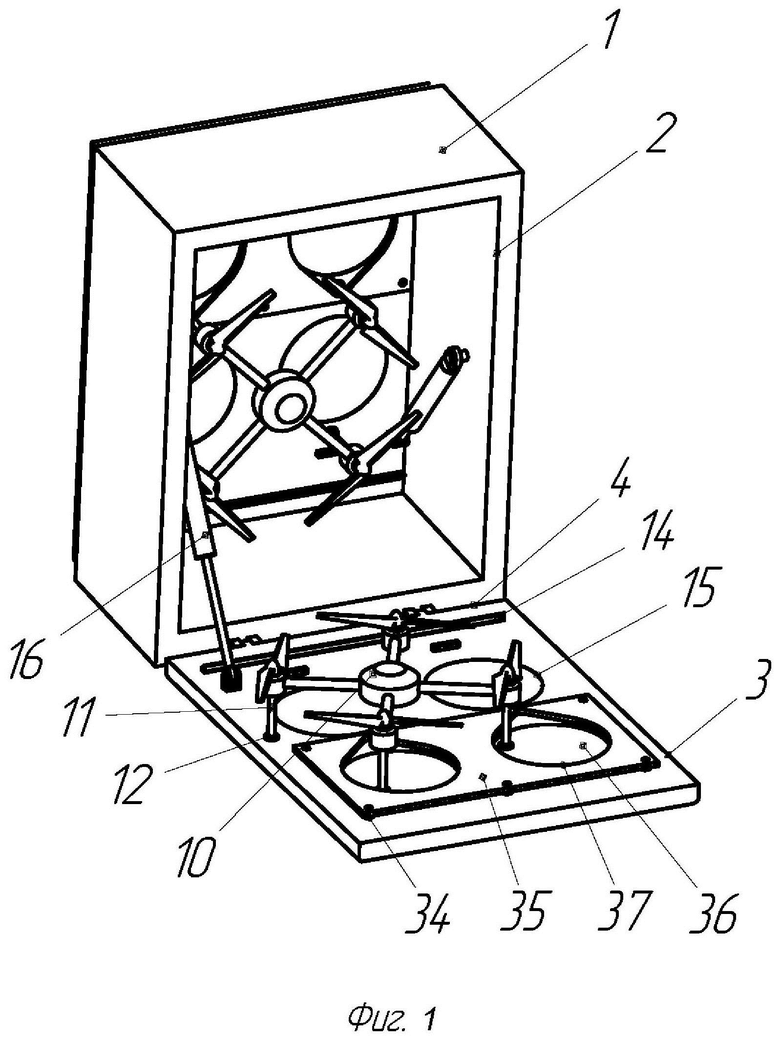
1. Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов, содержащая корпус, выполненный на боковой стенке корпуса по меньшей мере один люк, крышку люка с установленными в нижней части шарнирными петлями, посадочную площадку и устройство позиционирования БПЛА после приземления, отличающаяся тем, что на внутренней стенке крышки люка на опорах установлен лист, содержащий по меньшей мере два отверстия в виде фигуры замкнутого контура, содержащий по меньшей мере один внутренний угол, вершина которого направлена в сторону нижней кромки крышки люка.
2. Автоматическая станция по п. 1, отличающаяся тем, что боковые стенки отверстия выполнены наклонными.
3. Автоматическая станция по п. 1, отличающаяся тем, что содержит по меньшей мере два толкателя.
4. Автоматическая станция по п. 1, отличающаяся тем, что крышка люка выполнена прямоугольной формы.
5. Автоматическая станция по п. 1, отличающаяся тем, что крышка люка выполнена пятиугольной формы.
6. Автоматическая станция по п. 1, отличающаяся тем, что шарнирные петли расположены ниже нижней кромки крышки люка.
7. Автоматическая станция по п. 1, отличающаяся тем, что содержит по меньшей мере два люка.
8. Автоматическая станция по п. 1, отличающаяся тем, что крышка люка содержит установленный в нижней части желоб, который может быть обогреваемым.
9. Автоматическая станция по п. 1, отличающаяся тем, что кромки внутреннего угла отверстия, вершина которого направлена в сторону нижней кромки крышки люка, выполнены из электропроводного материала и изолированы друг от друга.
10. Автоматическая станция по любому из пп. 1-9, отличающаяся тем, что установлена на основание с возможностью вращения вокруг вертикальной оси.
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов и беспилотный летательный аппарат, работающий совместно с ней | 2019 |
|
RU2721048C1 |
| Автономная зарядная станция для беспилотных летательных аппаратов | 2021 |
|
RU2775272C1 |
| ПОЛУАВТОМАТ ДЛЯ НАБОРКИ СТОПОРОВ СТАЛЕРАЗЛИВОЧНЫХ КОВШЕЙ | 0 |
|
SU185019A1 |
| Способ изготовления из этернита радиаторного элемента, состоящего из отдельных отпрессованных половинок | 1932 |
|
SU43140A1 |
| US 20140124621 А1, 08.05.2014 | |||
| US 9139310 В1, 22.09.2015 | |||
| US 20160001883 A1, 07.01.2016 | |||
| US 20160144982 A1, 26.05.2016. | |||

