Предлагаемое устройство относится к измерительной технике, более конкретно к поворотно-чувствительным устройствам с колеблющейся массой. Используются такие устройства в системах стабилизации и управления летательными аппаратами.
Наиболее близким предлагаемому устройству является датчик угловой скорости ДУС ММА. Этот датчик выполнен по технологии МЭМС (микро электронно-механические системы). Он содержит колеблющийся маятник, который поворачивается в плоскости, ортогональной плоскости действия сил отклоняющих его основание. Поворот маятника фиксируется емкостным датчиком. Датчик описан www.mp-lab.ru. Аналогичные датчики описаны в патентах №2234679, №2398189, №2209394 и многих других. МЭМС датчики имеют малые весогабаритные параметры, однако обладают гораздо большими уходами начального напряжения, вызванными изменением температуры окружающей среды и механическими внешними воздействиями.
Предлагаемое устройство направлено на устранение указанного недостатка. Цель его существенное снижение уходов начального напряжения.
Указанная цель в датчике угловых скоростей достигается за счет введения дополнительной колеблющейся массы, расположенной в датчике так, что воздействие сил отклоняющих его основание, поворачивает маятник против поворота маятника, образованного первой колеблющейся массой. Сигналы с датчиков поворота маятников при этом как вычитаются так и суммируются. Разностный сигнал в большей степени зависит от угловой скорости и в меньшей степени от дестабилизирующих внешних факторов. Суммарный сигнал наоборот, в большей степени зависит от дестабилизирующих факторов. Если маятники выполнить в одном технологическом цикле, то суммарный сигнал вообще не будет зависеть от угловой скорости и нести информацию только о погрешности датчика угловой скорости. Эту погрешность можно вычесть из разносного сигнала. Указанное выше реализуется введением в датчик вычитателя и сумматора сигналов о повороте обеих маятников.
Общими элементами прототипа и предложенного датчика является применение в качестве чувствительного элемента колеблющегося маятника выполненного по технологии МЭМС.
Отличительными признаками являются:
- введение дополнительного маятника
- введение сумматора и вычитателя сигналов о повороте маятников.
За счет отличительных признаков определяется погрешность датчика угловых скоростей, которая вызвана температурными воздействиями внешней среды. Эта погрешность может быть учтена при определении угловой скорости.
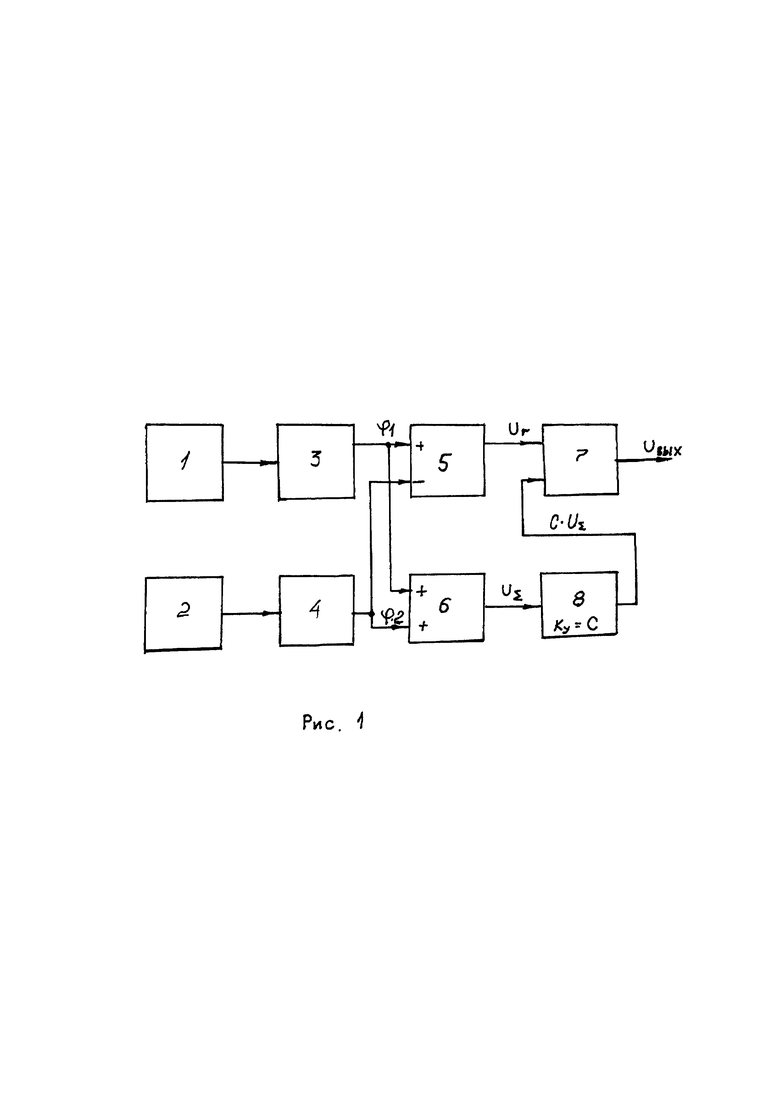
Работа устройства поясняется рисунком 1. На рисунке 1 представлена функциональная схема предложенного датчика. Позиции 1 и 2 - это колеблющиеся массы. 3 и 4 - элементы определяющие поворот колеблющихся масс. 5 - вычитатель, который реализуется инструментальным усилителем, 6 - сумматор, 7 - дифференциальный усилитель, 8 - операционный усилитель с коэффициентом передачи С.
При повороте основания датчика, на выходе элемента 3 потенциал ϕ1 изменяется пропорционально угловой скорости Ω и также этот сигнал определяется уходом начального напряжения U0.
ϕ1=K1⋅Ω+U01
На выходе элемента 4 потенциал ϕ2 определяется тем же уходом начального напряжения, но скорость основания датчика определяет этот потенциал с обратным знаком:
ϕ2=-Ω⋅K2+U02
При этом на выходе сумматора сигнал определится выражением:
UΣ=ϕ1+ϕ2=C(K1-K2)⋅Ω+CU0l+CU02,
а на выходе инструментального усилителя сигнал равен разности этих потенциалов:
Ur=ϕ1-ϕ2=(K1+K2)⋅Ω+U01-U02
На выходе дифференциального усилителя 7 сигнал определится выражением:
 где С - коэффициент передачи сигнала UΣ на выход датчика.
где С - коэффициент передачи сигнала UΣ на выход датчика.
Из выражения 1 следует, что, если выполнить настройку датчика в соответствии с равенством:  , то выходной сигнал датчика угловой скорости не будет зависеть от дрейфа начального напряжения. Тем самым показано, что такое устройство может обладать дрейфом начального уровня близким к «0». Для этого только понадобится измерение соотношения дрейфов напряжения начального уровня. Это соотношение при выполнении чувствительных элементов датчика в одном технологическом цикле является постоянным.
, то выходной сигнал датчика угловой скорости не будет зависеть от дрейфа начального напряжения. Тем самым показано, что такое устройство может обладать дрейфом начального уровня близким к «0». Для этого только понадобится измерение соотношения дрейфов напряжения начального уровня. Это соотношение при выполнении чувствительных элементов датчика в одном технологическом цикле является постоянным.
Изобретение относится к измерительной технике, более конкретно к поворотно-чувствительным устройствам с колеблющейся массой. Такие устройства используются в системах стабилизации и управления летательными аппаратами. Датчик угловых скоростей содержит колеблющуюся массу (маятник) и измерительный элемент, определяющий поворот маятника в плоскости, ортогональной плоскости действия сил, воздействующих на основание датчика. При этом дополнительно введены вторые аналогичные маятник и измерительный элемент, а также сумматор, инструментальный усилитель сигналов с двух измерительных элементов, операционный усилитель и дифференциальный усилитель. Оба маятника и оба измерительных элемента выполнены в едином технологическом цикле по технологии МЭМС. Маятники в корпусе датчика расположены так, что поворот второго маятника противоположен повороту маятника первого, при этом выходы обоих чувствительных элементов угловой скорости подключены к разнополярным входам инструментального усилителя и к однополярным входам сумматора, выход сумматора соединен со входом операционного усилителя с коэффициентом передачи С, а выход операционного усилителя и выход инструментального усилителя вычитаются на дополнительно введенном дифференциальном усилителе. Технический результат – повышение точности датчика угловой скорости. 1 ил.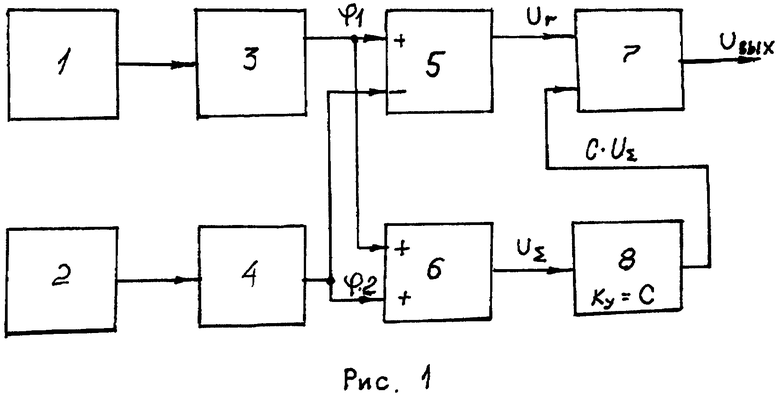
Датчик угловых скоростей, содержащий колеблющуюся массу (маятник) и измерительный элемент, определяющий поворот маятника в плоскости, ортогональной плоскости действия сил, воздействующих на основание датчика, отличающийся тем, что дополнительно введены вторые аналогичные маятник и измерительный элемент, а также сумматор, инструментальный усилитель сигналов с двух измерительных элементов, операционный усилитель и дифференциальный усилитель, причем оба маятника и оба измерительных элемента выполнены в едином технологическом цикле по технологии МЭМС, а маятники в корпусе датчика расположены так, что поворот второго маятника противоположен повороту маятника первого, при этом выходы обоих чувствительных элементов угловой скорости подключены к разнополярным входам инструментального усилителя и к однополярным входам сумматора, выход сумматора соединен со входом операционного усилителя с коэффициентом передачи С, определяемым из условия:  , где U01,U02 - отклонения напряжения чувствительных элементов угловой скорости от начальных значений (дрейф «0»), а выход операционного усилителя и выход инструментального усилителя вычитаются на дополнительно введенном дифференциальном усилителе.
, где U01,U02 - отклонения напряжения чувствительных элементов угловой скорости от начальных значений (дрейф «0»), а выход операционного усилителя и выход инструментального усилителя вычитаются на дополнительно введенном дифференциальном усилителе.
| СПОСОБ УПРАВЛЕНИЯ ЧУВСТВИТЕЛЬНЫМ ЭЛЕМЕНТОМ И ФОРМИРОВАНИЯ ВЫХОДНОГО СИГНАЛА ВИБРАЦИОННОГО КОРИОЛИСОВА ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2315953C1 |
| КАМЕРТОННЫЙ МИКРОГИРОСКОП | 2014 |
|
RU2580871C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2009 |
|
RU2398189C1 |
| ЭЛЕКТРОДНАЯ СТРУКТУРА ДЛЯ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП С ЭТОЙ СТРУКТУРОЙ (ВАРИАНТЫ) | 2007 |
|
RU2344374C1 |
| US 8534127 B2, 17.09.2013. | |||

