Г7 3
№
5
&
(Л
00
00
ройства за счет возможности захвата |деталей, имеющих угловое смещение относительно зажимных губок в плоскости, перпендикулярной оси симметрии захватного устройства. Устройство состоит из корпуса 1, на котором закреплены шарнирно-рычажные механизмы 5 и 6 с подпружиненными губ- ;ками 17 и 18. На рычагах 7 и 8 шар- I НИРно-рычажных механизмов 5 и 6 шарнирно закреплены ролики 9 и 10, взаимодействующие с клином 4, закреп I ленным на штоке 3 линейного привода
2. Ролики 9 и 10 перемещаются в пазах клина 4. Корпус 1 захватного устройства шарнирно установлен на корпусе привода 2 линейного перемещения. Шайба 24, установленная жестко на корпусе 1 захватного устройства, связана с втулкой 25, жестко установленной на корпусе привода 2, с помощью пружин кручения, возвращающих захватное устройство в исходное положение после отрыва захваченных деталей от базовой поверхности. 2 3.п. ф-лы, 2 ил.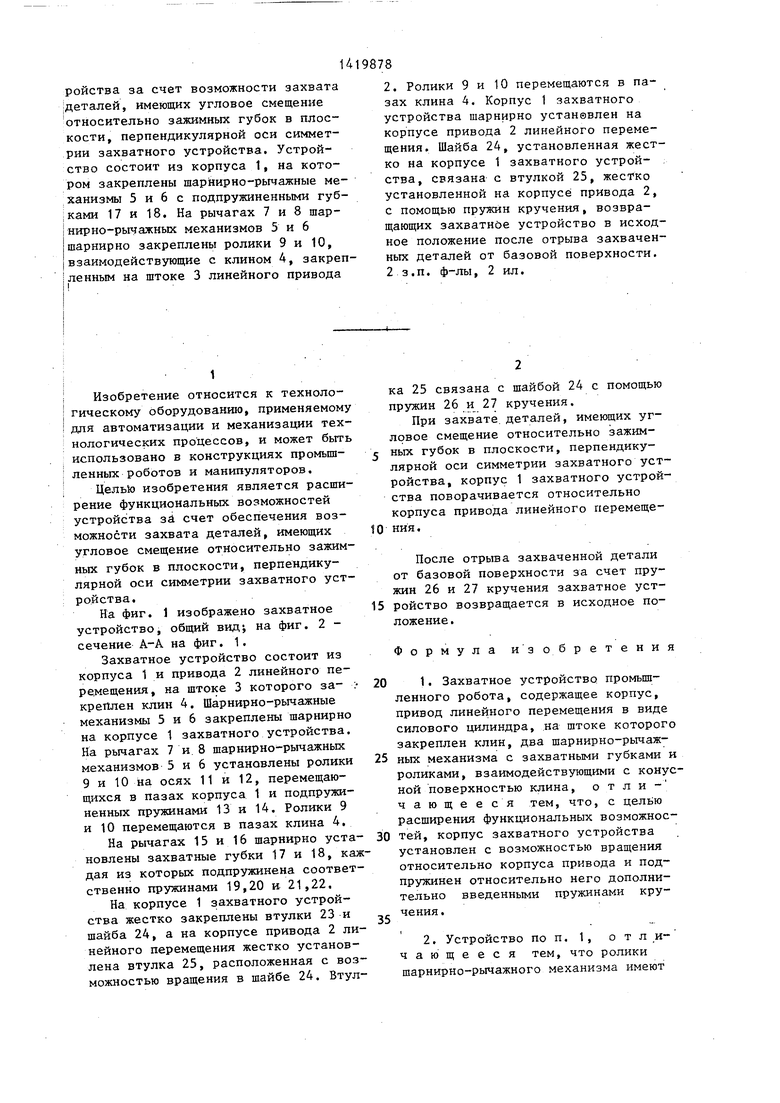
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1984 |
|
SU1237422A1 |
| Захватное устройство | 1977 |
|
SU662342A1 |
| Манипулирующее устройство для съема, кантования и выдачи изделий с пресса | 1987 |
|
SU1512775A1 |
| Захватное устройство | 1982 |
|
SU1007973A1 |
| Исполнительный орган промышленного робота | 1978 |
|
SU768633A1 |
| Захватное устройство | 1987 |
|
SU1445954A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Захватное устройство | 1989 |
|
SU1708603A1 |
| Схват промышленного робота | 1985 |
|
SU1310204A1 |
| МАНИПУЛЯТОР РОБОТА | 2015 |
|
RU2616317C1 |
Изобретение относится к технологическому оборудованию, применяемому для автоматизации и.механиза ;ии технологических процессов, и может быть использовано в конструкциях промышленных роботов и манипуляторов. Целью изобретения является расширение функциональных возможностей уст
1
Изобретение относится к технологическому оборудованию, применяемому для автоматизации и механизации технологических процессов, и может быть использовано в конструкциях промышленных роботов и манипуляторов.
Цель5о изобретения является расширение функциональных возможностей устройства 3d счет обеспечения возможности захвата деталей, имеющих угловое смещение относительно зажимных губок в плоскости, перпендикулярной оси симметрии захватного устройства.
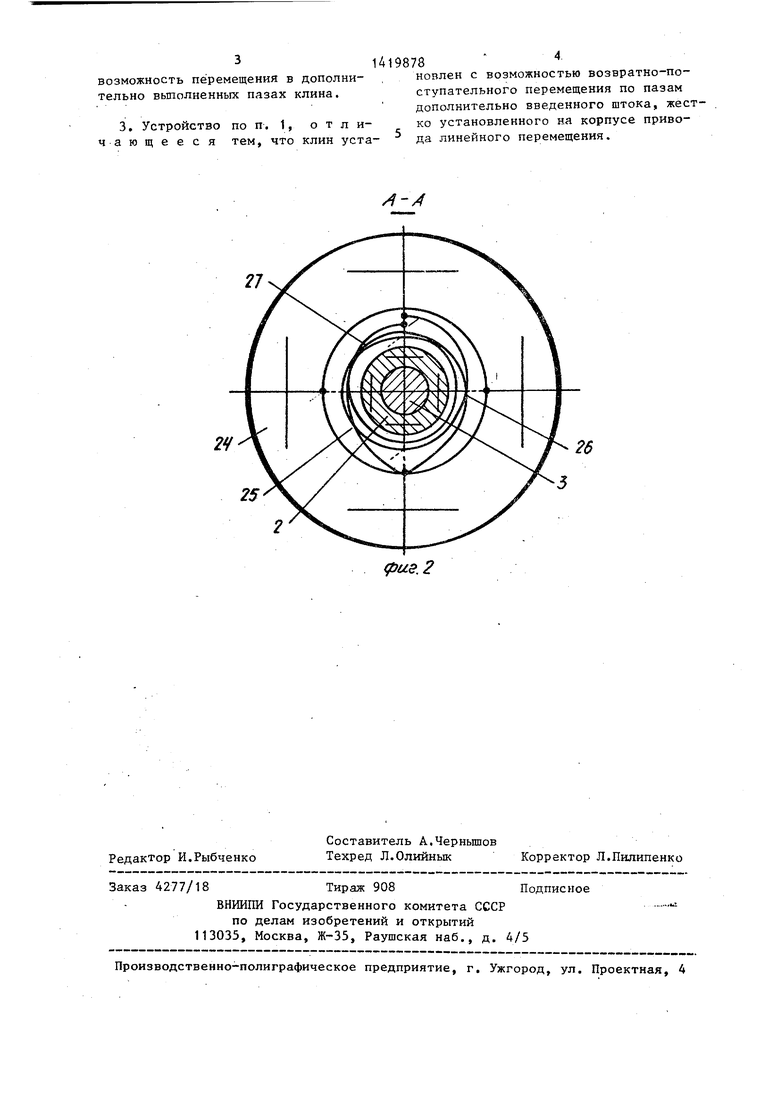
На фиг. 1 изображено захватное устройство, общий вид на фиг. 2 - сечение А-А на фиг. 1.
Захватное устройство состоит из корпуса 1 и привода 2 линейного перемещения, на штоке 3 которого за- : креплен клин 4. Шарнирно-рычажные механизмы 5 и 6 закреплены шарнирно на корпусе 1 захватного устройства. На рычагах 7 и. 8 шарнирно-рычажньк механизмов 5 и 6 установлены ролики 9 и 10 на осях 11 и 12, перемещающихся в пазах корпуса 1 и подпружиненных пружинами 13 и 14. Ролики 9 и 10 перемещаются в пазах клина 4.
На рычагах 15 и 16 шарнирно установлены захватные губки 17 и 18, каждая из которых подпружинена соответственно пружинами 19,20 и 21,22.
На корпусе 1 захватного устройства жестко закреплены втулки 23 и шайба 24, а на корпусе привода 2 линейного перемещения жестко установлена втулка 25, расположенная с возможностью вращения в шайбе 24. Втулка 25 связана с щайбой 24 с помощью пружин 26 и 27 кручения.
При захвате, деталей, имеющих угловое смещение относительно зажимс ньгх губок в плоскости, перпендикулярной оси симметрии захватного устройства, корпус 1 захватного устройства поворачивается относительно корпуса привода линейного перемеще10 ния.
После отрыва захваченной детали от базовой поверхности за счет пружин 26 и 27 кручения захватное уст- 15 РОЙСТВО возвращается в исходное положение .
Формула изобретения
20 1. Захватное устройство промьш - ленного робота, содержащее корпус, привод линейного перемещения в виде силового цилиндра, на штоке которого закреплен клин, два шарнирно-рычаж25 ных механизма с захватными губками и роликами, взаимодействующими с конусной поверхностью клина, о т л и - ч ающе е ся тем, что, с целью расширения функциональных возможнос30 тей, корпус захватного устройства установлен с возможностью вращения относительно корпуса привода и под- пруткинен относительно него дополнительно введенными пружинами кручения .
35
31419878
возможность перемещения в дополни- , новлен с возможностью возвратно-поступательного перемещения по пазам дополнительно введенного штока, жес ко установленного на корпусе привода линейного перемещения.
тельно вьшолненньгх пазах клина.
25
новлен с возможностью возвратно-поступательного перемещения по пазам дополнительно введенного штока, жестко установленного на корпусе привода линейного перемещения.
(pas. 2
| Захватное устройство | 1977 |
|
SU662342A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
