Изобретение относится к области гидроакустики и предназначено для обработки шумового сигнала объекта в целях его последующей классификации в том случае, когда сигнал объекта обнаружен разными гидроакустическими системами, находящимися на общем носителе, антенны которых разнесены в пространстве.
Задача интеграции гидроакустических систем всегда ставилась разработчиками аппаратуры [Андреев М.Я., Охрименко С.Н., Клюшин В.В., Рубанов И.Л., Яковлев В.А. Интегрированная система подводного наблюдения для надводного корабля // Морской сборник. 2006. №8. С. 50-51]. Системы, работающие в разных диапазонах частот, имеющие различные приемные антенны и (или) способы обработки информации, оптимизированы под обнаружение различных частей единого гидроакустического сигнала. Следовательно, объединение информации нескольких систем позволит получить наиболее полную информацию о шумящем в море объекте.
Известны способы интеграции гидроакустических систем: способ [Алексеев Н.С., Волкова А.А., Каришнев Н.С. Патент РФ №2572792 от 15.12.2015 «Способ интеграции систем обнаружения шумящих в море объектов», МПК G01S 3/80] и способ, описанный в работе [Андреев М.Я., Охрименко С.Н., Клюшин В.В., Рубанов И.Л., Яковлев В.А. Интегрированная система подводного наблюдения для надводного корабля // Морской сборник. 2006. №8. С. 50-51]. Указанные способы позволяют объединить гидроакустическую информацию двух систем на уровне пространственного распределения отношений сигнала к помехе, вычисленных в совокупной частотной полосе. При этом теряется информация о спектральном составе сигналов, что ограничивает возможности классификации после интеграции. Кроме того, способы неприменимы для систем, антенны которых разнесены в пространстве.
Известны способы классификации шумящих объектов [Тимошенков В.Г., Дядченко Т.З. Патент РФ №2262121 от 10.10.2005 «Способ классификации шумящих объектов», МПК G01S 3/80] или [Афанасьев А.Н., Знаменская Т.К. Патент РФ №2546851 от 10.04.2015 «Способ классификации гидроакустических сигналов шумоизлучения морского объекта», МПК G01S 3/80], в которых при классификации по спектральной информации используется совокупная информация двух антенн. Однако, в этих случаях антенны нельзя отнести к различным гидроакустическим системам, поскольку они полностью идентичны, работают в одинаковом диапазоне частот, и используют одинаковые способы обработки информации.
Наиболее близким аналогом по выполняемым процедурам к предлагаемому изобретению является способ [Волкова А.А., Никулин М.Н. Способ отождествления объектов, обнаруженных пространственно-разнесенными системами. Патент РФ №2730103 от 17.08.2020. МПК G01S3/80], который принят за прототип.
В способе-прототипе выполняются следующие операции:
принимают шумовые сигналы раздельно, но одновременно двумя системами, находящимися на общем носителе,
выбирают частотный диапазон, общий для обеих систем,
фильтруют принятые сигналы в обеих системах полосовым фильтром с полосой пропускания, равной выбранному частотному диапазону,
вычисляют взаимно-корреляционную функцию между отфильтрованными сигналами обеих систем,
находят максимальное значение взаимно-корреляционной функции,
принимают решение о наблюдении одного объекта в двух системах при выполнении условия: максимальное значение взаимно-корреляционной функции более порога.
Способ позволяет отожествлять информацию систем, антенны которых разнесены в пространстве, но не обладает признаками полной интеграции. После принятия решения о наблюдении одного объекта в двух системах, дальнейшая обработка сигналов осуществляется отдельно в каждой системе, что не дает возможности использовать для классификации совокупную информацию двух систем, и, следовательно, не обеспечивает увеличение эффективности классификации.
Задачей заявляемого способа является обеспечение совместной обработки двух сигналов, если они принадлежат одному объекту, обнаруженному в пространственно-разнесенных системах, находящихся на общем носителе, в целях последующей классификации объекта по совокупной информации.
Для решения поставленной задачи в способ обработки шумового сигнала объекта, обнаруженного гидроакустическими пространственно-разнесенными системами, в котором
принимают шумовой сигнал SA(t) гидроакустической системой А в диапазоне частот [ƒA1,ƒA2],
принимают одновременно шумовой сигнал SB(t) гидроакустической системой В в диапазоне частот [ƒB1, fB2],
выбирают частотный диапазон, общий для обеих систем,
фильтруют принятые сигналы в обеих системах первым полосовым фильтром с полосой пропускания, равной выбранному частотному диапазону,
вычисляют взаимно-корреляционную функцию W(t) между отфильтрованными
сигналами обеих систем,
находят максимальное значение взаимно-корреляционной функции, принимают решение о наблюдении одного объекта в двух системах при выполнении условия: максимальное значение взаимно-корреляционной функции более порога,
введены новые признаки, а именно:
выбирают гидроакустические системы А и В таким образом, чтобы границы их частотных диапазонов удовлетворяли условию fA1<fB1<fA2<fB2,
выбирают общий частотный диапазон первого фильтра в виде [ƒB1,ƒA2],
определяют задержку по времени τ между моментами прихода сигналов SA(t) и SB(t) как аргумент максимального значения взаимно-корреляционной функции τ=arg max{W(t)},
осуществляют сдвиг по времени одного из принятых сигналов на задержку τ относительно другого, выбранного опорным,
фильтруют сдвинутый во времени сигнал вторым полосовым фильтром с полосой пропускания, уникальной для этого сигнала,
определяют совокупный сигнал объекта S(t) в полной полосе частот [ƒA1,ƒB2] как S(t)=SA(t)+SB(t),
осуществляют частотную обработку совокупного сигнала S(t), и классификацию объекта.
Техническим результатом изобретения является получение сигнала объекта, обладающего совокупными частотными свойствами сигналов, обнаруженных в двух системах, что повышает эффективность классификации объекта.
Покажем возможность достижения указанного технического результата предложенным способом.
Для увеличения эффективности классификации, основанной на особенностях спектрального состава сигнала, необходимо, по возможности, расширять анализируемую частотную полосу сигнала [Деев В.В. и др. Анализ информации оператором-гидроакустиком. Л.: Судостроение. 1990]. В рамках одной фиксированной системы сделать это не представляется возможным в связи с физическими ограничениями размеров гидроакустической антенны. Однако, увеличение анализируемой частотной полосы сигнала можно обеспечить, если использовать потенциальные возможности двух систем. Тогда, сложение сигналов двух систем, работающих в разных диапазонах частот, позволит получить сигнал, обладающий совокупными частотными свойствами, что, в свою очередь увеличит эффективность классификации. Именно это и заложено в основу предлагаемого способа, когда совокупная полная полоса частот [ƒA1,ƒB2] превышает отдельные полосы частот [ƒA1,ƒA2] системы A и [ƒB1,ƒB2] системы В, если изначально границы диапазонов удовлетворяют условию ƒA1<ƒB1<ƒA2<ƒB2.
Однако, для корректного сложения двух сигналов необходимо выполнить два условия, которые заложены в процедуры способа. Во-первых, необходимо исключить возможное удвоение мощности сигнала при его сложении в том частотном диапазоне, который является общим для двух систем. Для этого в способ введена процедура полосовой фильтрации одного из сигналов с полосой пропускания, уникальной для этого сигнала. После такой фильтрации мы уменьшаем частотную полосу одного из сигналов, и их полосы становятся не пересекающимися, а стыкующимися. Во-вторых, необходимо компенсировать задержку сигнала по времени, которая возникает при распространении сигнала от объекта к двум антеннам, разнесенным в пространстве. Для этого в способе используется определение аргумента локального выброса взаимно-корреляционной функции, который характеризует разницу во времени распространения одного сигнала по двум путям [Тихонов В.И. Статистическая радиотехника. М.: Советское радио. 1966]. После чего осуществляют сдвиг по времени одного сигнала относительно другого, приводя их к единой системе координат по времени. Таким образом, все новые процедуры способа направлены на корректное сложение двух сигналов, обнаруженных пространственно-разнесенными системами, что в результате позволяет получить сигнал, обладающий совокупными частотными свойствами обеих систем.
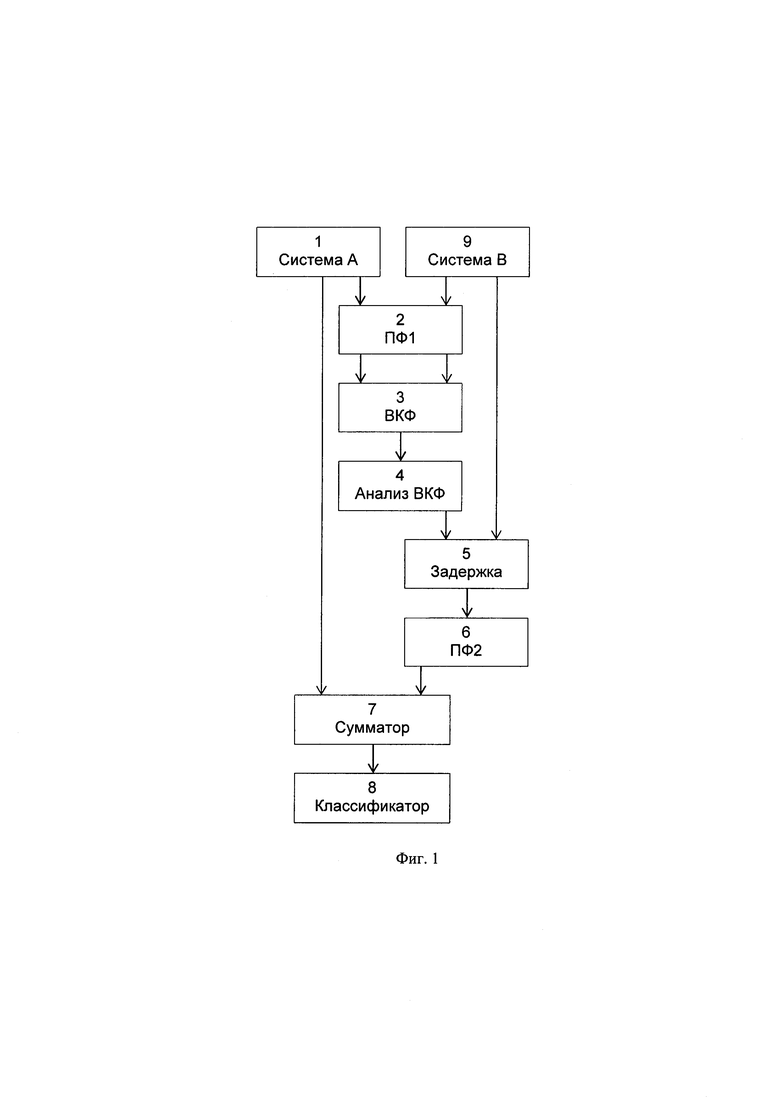
Сущность изобретения поясняется фигурой 1, на которой приведена блок-схема устройства, реализующего предлагаемый способ.
На фиг. 1 последовательно соединены блок 1 (Система А), фильтр 2 с общей полосой частот (ПФ1), блок 3 вычисления взаимно-корреляционной функции (ВКФ), блок 4 анализа ВКФ (Анализ ВКФ), блок 5 вычисления задержки между сигналами (Задержка), фильтр 6 с уникальной частотной полосой (ПФ2), Сумматор 7, Классификатор 8. Второй выход блока 1 соединен со вторым входом Сумматора 7. Второй выход фильтра 2 соединен со вторым входом блока 3. Первый выход блока 9 (Система В) соединен со вторым входом фильтра 2, а второй выход блока 9 соединен со вторым входом блока 5.
В интегрированном гидроакустическом комплексе, состоящем из двух систем, антенны которых разнесены в пространстве, предлагаемый способ может быть реализован следующим образом.
До начала работы выбирают:
- частотный диапазон для первого полосового фильтра;
- систему, для сигнала которой будет осуществляться задержка по времени и вторая полосовая фильтрация;
- частотный диапазон для второго полосового фильтра.
Частотный диапазон для первого полосового фильтра должен быть выбран таким образом, чтобы он был общим для способов обработки информации в обеих системах, то есть [ƒB1,ƒA2]. Если системы работают в неперекрывающихся диапазонах частот, то способ не может быть реализован.
Систему, для сигнала которой будет осуществляться задержка по времени, необходимо выбрать для того, чтобы правильно осуществить вычисление взаимно-корреляционной функции (ВКФ) в блоке 3. В рассматриваемом примере (рис. 1) блок 5 задержки по времени (Задержка) установлен в линии обработки сигнала системы В, следовательно, при вычислении ВКФ необходимо использовать сигнал системы А в качестве опорного, относительно которого сдвигать сигнал системы В. Тогда, задержка будет вычислена верно именно для случая, когда в дальнейшем, в блоке 5, осуществляется сдвиг по времени сигнала SB(t) относительно SA(t). Возможна реализация способа, когда блок задержки по времени был бы установлен в линии обработки сигнала системы А, тогда при вычислении ВКФ в блоке 3 необходимо было бы в качестве опорного использовать сигнал системы В.
Частотный диапазон для второго полосового фильтра должен быть выбран таким образом, чтобы он был уникальным для системы, сигнал которой будет подвержен фильтрации. В рассматриваемом примере (рис. 1) второй полосовой фильтр (ПФ2) установлен в линии обработки сигнала системы В, следовательно, частотный диапазон должен быть выбран как [ƒA2,ƒB2] для сигнала SB(t). Тогда, с учетом исходной полосы системы А, для последующего суммирования будут использованы сигналы с частотными полосами, идущими встык друг к другу: [ƒA1,ƒA2] и [ƒA2,ƒB2]. Возможна реализация способа, когда второй полосовой фильтр был бы установлен в линии обработки сигнала системы А, тогда частотный диапазон необходимо было бы выбрать как [ƒA1,ƒB1] для сигнала SA(t).
В динамике работы система А (блок 1) и система В (блок 9) независимо друг от друга принимают сигналы объекта SA(t) и SB(t), соответственно. Оба сигнала поступают в первый фильтр 2 (ПФ1), в котором для них реализуются независимые, но одинаковые процедуры полосовой фильтрации в общем частотном диапазоне [ƒB1,ƒA2]. Процедура полосовой фильтрации является стандартной, и может быть заимствована из [Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов // Пер. с англ. М.: Мир. 1978].
Из блока 2 отфильтрованные в общей полосе сигналы поступают в блок 3 (ВКФ), где вычисляется их взаимно-корреляционная функция согласно [Рабинер Л., Гоулд Б. Теория…] с учетом того, что в данном случае сигнал системы А принят в качестве опорного. Вычисленная взаимно-корреляционная функция W(t) поступает в блок 4 (Анализ ВКФ), в котором осуществляется ее анализ:
- определяют максимальное значение взаимно-корреляционной функции K=max{W(t)} и осуществляют его сравнение с порогом. Если выполняется условие K>Por, где Por - пороговое значение, которое выбирается по правилу обнаружения аномальных выбросов в выборке значений нормально распределенной случайной величины [Тейлор Дж. Введение в теорию ошибок. М.: Мир, 1985], то принимают решение о наблюдении одного объекта в двух системах, и продолжают обработку далее. Иначе - прекращают совместную обработку двух сигналов;
- в блоке 4 определяют аргумент максимального значения взаимно-корреляционной функции τ=arg max {W(t)}, который является задержкой по времени между моментами прихода сигналов SA(t) и SB(t). Передают задержку τ в блок 5.
В блок 5 (Задержка) поступает задержка τ из блока 4 и исходный сигнал системы В SB(t) из блока 9. В блоке 5 осуществляется сдвиг по времени сигнала системы В на задержку τ: SB(B)=SB(t+τ). Сигнал после задержки поступает в фильтр 6.
В фильтре 6 (ПФ2) осуществляется процедура полосовой фильтрации для сигнала после задержки в частотном диапазоне [ƒA2,ƒB2], уникальном сигнала SB(t). Отфильтрованный сдвинутый сигнал системы В поступает в сумматор 7.
В Сумматор 7 поступают два сигнала: исходный сигнал системы А из блока 1 и сигнал системы В после задержки и фильтрации из блока 6. В Сумматоре 7 осуществляется их суммирование S(t)=SA(t)+SB(t). При этом, выполненный до этого сдвиг по времени одного из сигналов позволяет компенсировать разницу времен хода сигнала к антеннам системы А и системы В, а выполненная фильтрация в уникальном диапазоне частот позволяет исключить удвоение мощности сигнала в перекрывающемся диапазоне частот. Совокупный сигнал S(t) поступает в блок 8.
В Классификаторе 8 осуществляется частотная обработка совокупного сигнала и классификация объекта. Для частотной обработки используют известные методы [Рабинер Л., Гоулд Б. Теория…], а для классификации объекта используют известные способы классификации, основанные на особенностях спектрального состава сигнала, например [Знаменская Т.К. Патент РФ №2603886 от 10.12.2016 «Способ классификации гидроакустических сигналов шумоизлучения морского объекта», МПК G01S 3/80]. При этом, использование для классификации именно совокупного сигнала, общий частотный диапазон которого превышает частотные диапазоны сигналов в системах А я В отдельно, позволяет увеличить эффективность классификации [Деев В.В. и др. Анализ информации оператором-гидроакустиком. Л.: Судостроение. 1990].
Все изложенное позволяет считать задачу изобретения решенной. Предложен способ обработки сигнала объекта, обнаруженного гидроакустическими пространственно-разнесенными системами, который позволит увеличить эффективность классификации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ отождествления объектов, обнаруженных пространственно-разнесенными системами | 2019 |
|
RU2730103C1 |
| Способ адаптивного обнаружения морского шумящего объекта | 2023 |
|
RU2809016C1 |
| Способ определения глубины морского объекта с использованием шумопеленгаторной станции с донной линейной многоэлементной антенной | 2024 |
|
RU2838637C1 |
| СПОСОБ И УСТРОЙСТВО ПЕРЕДАЧИ ДИСКРЕТНОЙ ИНФОРМАЦИИ ДЛЯ БЫСТРОДВИЖУЩИХСЯ ОБЪЕКТОВ | 2017 |
|
RU2658649C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444754C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444755C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ СУДНА ОТНОСИТЕЛЬНО ДНА | 1992 |
|
RU2042152C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444756C1 |
| СПОСОБ КОРРЕЛЯЦИОННОЙ ОБРАБОТКИ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ БЫСТРОДВИЖУЩИХСЯ ЦЕЛЕЙ | 2005 |
|
RU2293997C1 |
| СПОСОБ ПРИЕМА ШУМОПОДОБНЫХ СИГНАЛОВ С МИНИМАЛЬНОЙ ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ | 2006 |
|
RU2307474C1 |
Использование: изобретение относится к области гидроакустики и предназначено для обработки шумового сигнала объекта в целях его последующей классификации в том случае, когда сигнал объекта обнаружен разными гидроакустическими системами, находящимися на общем носителе, антенны которых разнесены в пространстве. Сущность: способ основан на приеме акустического сигнала объекта раздельно, но одновременно двумя гидроакустическими системами, находящимися на общем носителе, и анализе взаимно-корреляционной функции сигналов этих систем для принятия решения о наблюдении одного объекта в двух системах. При реализации способа на основании анализа взаимно-корреляционной функции определяют задержку по времени между моментами прихода сигналов, сдвигают один сигнал по времени относительно другого и определяют суммарный сигнал объекта. Это позволяет при дальнейшей классификации, основанной на особенностях спектрального состава сигнала, использовать более широкую частотную полосу, чем частотная полоса каждой из двух систем отдельно. Технический результат: повышение эффективности классификации объекта за счет получения сигнала объекта, обладающего совокупными частотными свойствами сигналов, обнаруженных в двух системах. 1 ил.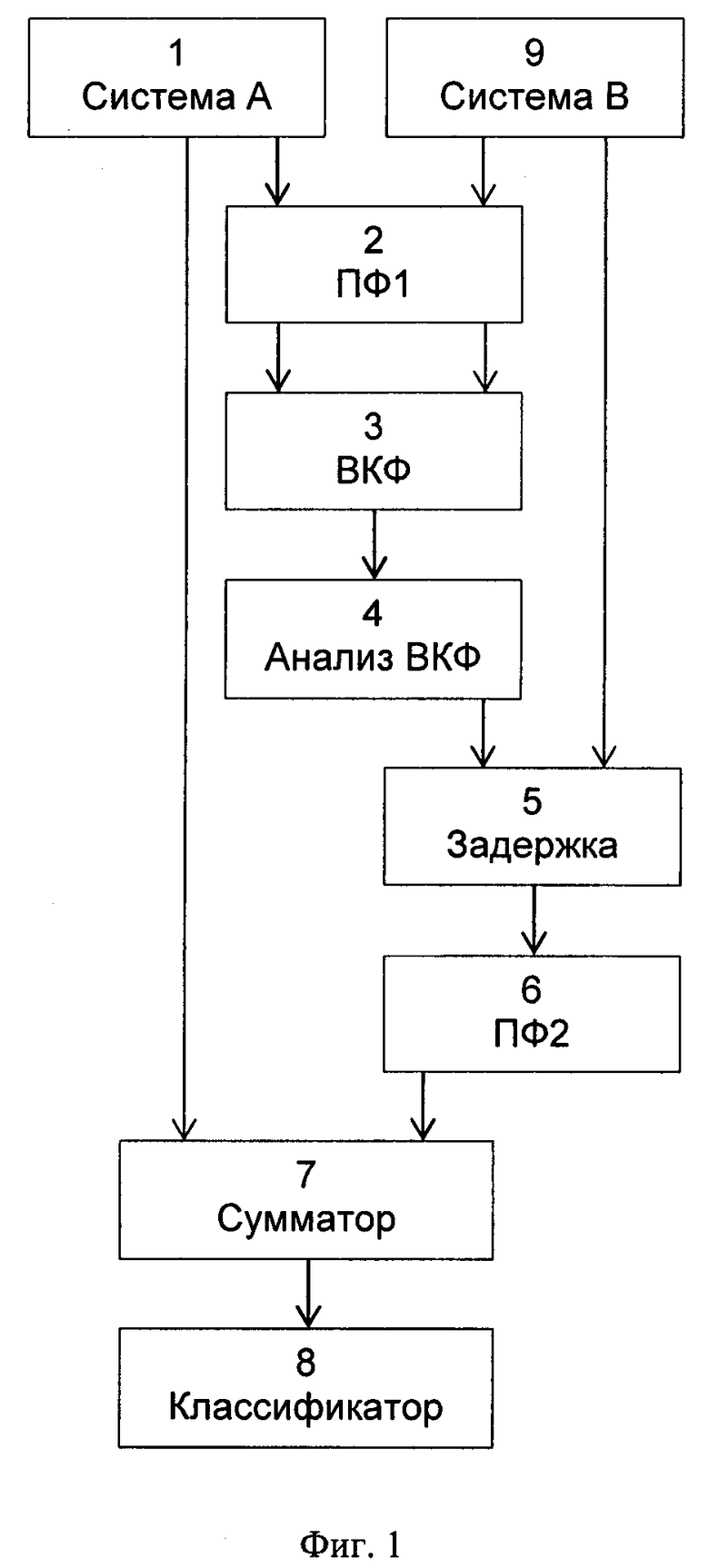
Способ обработки шумового сигнала объекта, обнаруженного гидроакустическими пространственно-разнесенными системами, в котором принимают шумовой сигнал SA(t) гидроакустической системой А в диапазоне частот [ƒA1,ƒA2], принимают одновременно шумовой сигнал SB(t) гидроакустической системой В в диапазоне частот [ƒB1,ƒB2], выбирают частотный диапазон, общий для обеих систем, фильтруют принятые сигналы в обеих системах первым полосовым фильтром с полосой пропускания, равной выбранному частотному диапазону, вычисляют взаимно-корреляционную функцию W(t) между отфильтрованными сигналами обеих систем, находят максимальное значение взаимно-корреляционной функции, принимают решение о наблюдении одного объекта в двух системах при выполнении условия: максимальное значение взаимно-корреляционной функции более порога, отличающийся тем, что выбирают гидроакустические системы А и В таким образом, чтобы границы их частотных диапазонов удовлетворяли условию ƒA1<ƒB1<ƒA2<ƒB2, выбирают общий частотный диапазон первого фильтра в виде [ƒB1,ƒA2], определяют задержку по времени τ между моментами прихода сигналов SA(t) и SB(t) как аргумент максимального значения взаимно-корреляционной функции τ=arg max{W(t)}, осуществляют сдвиг по времени одного из принятых сигналов на задержку τ относительно другого, выбранного опорным, фильтруют сдвинутый во времени сигнал вторым полосовым фильтром с полосой пропускания, уникальной для этого сигнала, определяют совокупный сигнал объекта S(t) в полной полосе частот [ƒA1,ƒB2] как S(t)=SA(t)+SB(t), осуществляют частотную обработку совокупного сигнала S(t) и классификацию объекта.
| Способ отождествления объектов, обнаруженных пространственно-разнесенными системами | 2019 |
|
RU2730103C1 |
| СПОСОБ КЛАССИФИКАЦИИ ШУМЯЩИХ ОБЪЕКТОВ | 2003 |
|
RU2262121C2 |
| СПОСОБ КЛАССИФИКАЦИИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКОГО ОБЪЕКТА | 2013 |
|
RU2546851C1 |
| Гидролокационный способ обнаружения объекта и измерения его параметров | 2018 |
|
RU2697937C1 |
| US 5031159 A, 09.07.1991 | |||
| KR 20130047221 A, 08.05.2013.. | |||

