«Область техники, к которой относится изобретение»
Изобретение относится к устройствам организации и управление движением на железных дорогах и средствам техники безопасности на железнодорожном транспорте.
«Уровень техники»
Известно устройство (1) для расцепления железнодорожных вагонов, включающее перемещающуюся параллельно рельсовому пути по направляющей тележку, несущую расцепной механизм, воздействующий на расцепной узел автосцепки, причем направляющая смонтирована на колоннах, расположенных вдоль рельсового пути, а расцепной механизм установлен в кабине оператора - расцепщика, устройство снабжено автоматической системой регулирования пространственного положения кабины с расцепным механизмом, имеющей блоки дистанционного измерения скоростей надвига на сортировочную горку составов и горизонтального перемещения указанной кабины, блок сравнения указанных скоростей, выход которого связан со входом блока синхронизации надвига составов.
Недостатками известного устройства являются: использование ручного труда, хотя и частично механизированного, в крайне тяжелых условиях, а также низкая точность синхронизации скорости движения механизма расцепления и автосцепки расцепляемых вагонов. Процессы по роспуску составов на сортировочных горках весьма скоротечны - сама скорость может достигать 10-12 км/ч при средней около 6 км/ч, ускорение - до 0,5 м/с2 при использовании ручного труда составителей поездов. Оператор, находящийся в кабине будет испытывать постоянные ускорения разгона и торможения, что будет приводить к быстрому утомления и укачивания - болезненного состояния, симптомами которого являются: сильное головокружение, тошнота, общая слабость организма и др.
Первый из указанных недостатков устранен в устройстве авторасцепки грузовых вагонов (2) представляющем собой передвижной роботизированный комплекс, состоящий из цифровой телекамеры и компьютера, установленных на каретке, что обеспечивает получение непрерывного изображения движущегося вагона и распознание изображения автосцепки. Затем подсчитывает количество автосцепок (вагонов), мимо которых каретка должна последовать без остановки, а при приближении к заданной автосцепке выдает сигнал на выравнивание скорости каретки и состава. Каретка начинает движение со скоростью надвига. Цифровая телекамера, установленная на каретке, захватывает изображение нужной автосцепки и выдает сигналы для наведения каретки точно напротив нужной автосцепки, а затем для наведения вилки манипулятора на цепочку автосцепки. Вилка манипулятора выдвигается, захватывает цепочку, поворачивается и задвигается в исходное положение. Достигается повышение механизации и автоматизации расцепки вагонов. Вилка манипулятора выдвигается, захватывает цепочку, поворачивается и задвигается в исходное положение. Расцепка произведена. Бортовой компьютер выдает блоку управления кареткой команду на торможение каретки и движение ее назад в исходное положение для следующей отцепки.
Бортовой компьютер получает сигнал от скоростемера, установленного за горбом горки, сравнивая скорости отцепа и надвига, выдает сигнал о состоявшемся или несостоявшемся расцеплении. В последнем случае подает сигнал машинисту горочного локомотива.
Недостатком известного решения является низкая производительность расформирования составов на сортировочной горке, хотя применение ручного труда здесь исключается.
Наиболее близким по технической сути является устройство (3), содержащее выполненную с возможностью перемещения относительно подлежащих расцеплению грузовых вагонов каретку. На каретку установлены манипулятор и оптико-электронная система, сигналы которой используются для определения скорости и координат расцепного узла. Количество кареток Н для одного пути надвига определяется из соотношения Н≥ТВ/ТП, где ТВ - продолжительность цикла расцепки от начала расцепки Nk до возврата каретки после окончания расцепки Nk на исходную позицию начала следующей расцепки, ТП - время от начала расцепки Nk до подхода следующей отцепляемой группы вагонов Nk+1 на исходную позицию начала расцепки Nk+1. Манипулятор и видеосистема размещены на каждой каретке. Достигается повышение надежности, эффективности и производительности работы сортировочной горки.
Это устройство и принято за прототип. Известное устройство имеет два недостатка, во - первых, синхронизация движения манипулятора и надвигаемого состава производится путем сравнения скорости каретки манипулятора со скоростью надвигаемого состава путем независимого измерения каждой из рассматриваемых скоростей, при этом скорость надвигаемого состава рассматривается, как независимая случайная величина, реализация которой в следующий момент времени неизвестна (так называемая схема «черного ящика»). В этом случае неизбежно возникает отклонение фактического положения каретки (соответственно и манипулятора) от оптимального, она то отстает от состава, то опережает состав, т.е. можно говорить, что имеет место определенный разброс скорости каретки  , где Dv дисперсия отклонения скорости каретки от скорости состава.
, где Dv дисперсия отклонения скорости каретки от скорости состава.
Второй недостаток известного устройства состоит в том, что предлагается воздействие только на одну (ближнюю к каретке) цепочку расцепления. Натурными наблюдениями за расцеплением вагонов на сортировочных горках было установлено, что примерно от 2 до 3% вагонов имеют дефекты цепочек валиков автосцепок: укороченные, удлиненные и оборванные (Волков, А.В. «Обеспечение безопасности труда составителей поездов на основе совершенствования технических средств защиты от наездов подвижного состава» Дис.канд. техн. наук. -М. -1984. -215 с). Тем самым можно ожидать отказ в расцеплении примерно с вероятностью Ротказа равной половине числа обрывов цепочки (т.е. вероятность того, что именно ближняя к каретке цепочка валика подъемника автосцепки окажется оборванной) Ротказа=1,0⋅10-2 - 1,5⋅10-2.
«Раскрытие изобретения»
Техническим результатом изобретения является повышение надежности операции расцепления в автоматическом режиме.
Вышеуказанный технический результат достигается посредством устройства для расцепления железнодорожных вагонов, содержащего выполненную с возможностью перемещения относительно подлежащих расцеплению грузовых вагонов каретку с установленным на ней манипулятором с приводом и оптико-электронной системой, выходы которой подключены к блоку коррекции скорости каретки относительно вагонов и блоку распознавания и координат расцепного узла, при этом оно снабжено двумя роботами-манипуляторами и тремя видеокамерами: первая расположена межу роботами-манипуляторами соосно с лазерным дальномером, две другие видеокамеры расположенные соосно с роботами-манипуляторами, установленными на каретке на определенном расстоянии вдоль продольной оси каретки, причем перечисленные выше устройства связаны двухсторонней связью через согласующее устройство с бортовым компьютером, к которому через другое согласующее устройство подключены кодер, связанный с выходом радиостанции, подключенной по радиоканалу к радиостанции дежурного по горке, входы и выходы приемо-передаюпщх трактов радиостанции последнего соединены через еще одно согласующее устройство со стационарной частью системы телеуправления горочным локомотивом, подключенной к автоматизированному рабочему месту оператора сортировочной горки, к бортовому компьютеру подключен также через блок корректирующих характеристик, в котором хранится информация об изменении во времени ускорения состава определенной массы при заданной начальной скорости локомотива, к другому входу компьютера последовательно подключены блок коррекции движения каретки, исполнительный механизм перемещения каретки и тормозные устройства каретки.
Наличие двух независимых роботов-манипуляторов позволит повысить надежность автоматического расцепления соответственно вероятность одновременного обрыва цепочек на расцепляемой автосцепке и соответственно вероятность Ротказа существенно снизится Ротказа = Ротказа ближней ⋅ Ротказа дальней=(1,0⋅10-2 - 1,5⋅10-2)2=1,0⋅10-4 - 2,25⋅10-4.
Количество кареток Н для одного пути надвига определяется из соотношения зон расцепления отцепов, установленных в работе «Повышение безопасности роспуска подвижного состава на сортировочных горках большой и средней мощности» и минимальное Н≥3 из которых первая для расцепления отцепов из 1-5 вагонов, вторая для расцепления отцепов длиной больше 5 вагонов и еще одна резервная на случай отказа любой из первых двух.
«Краткое описание чертежей»
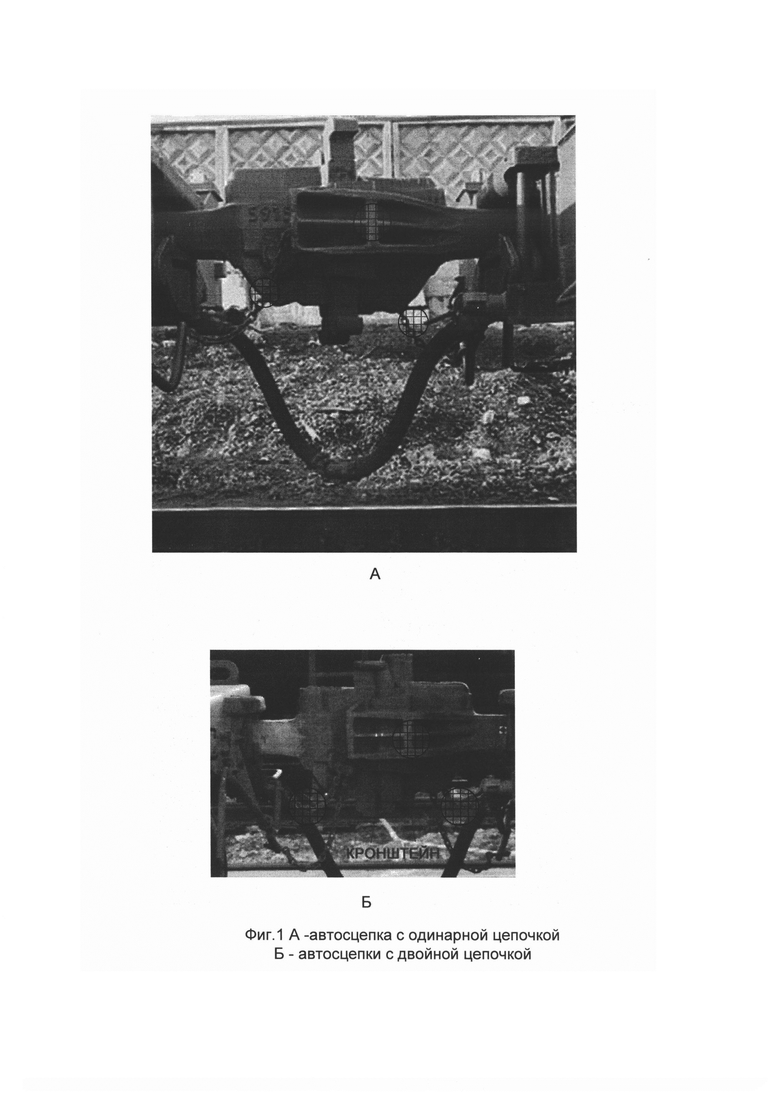
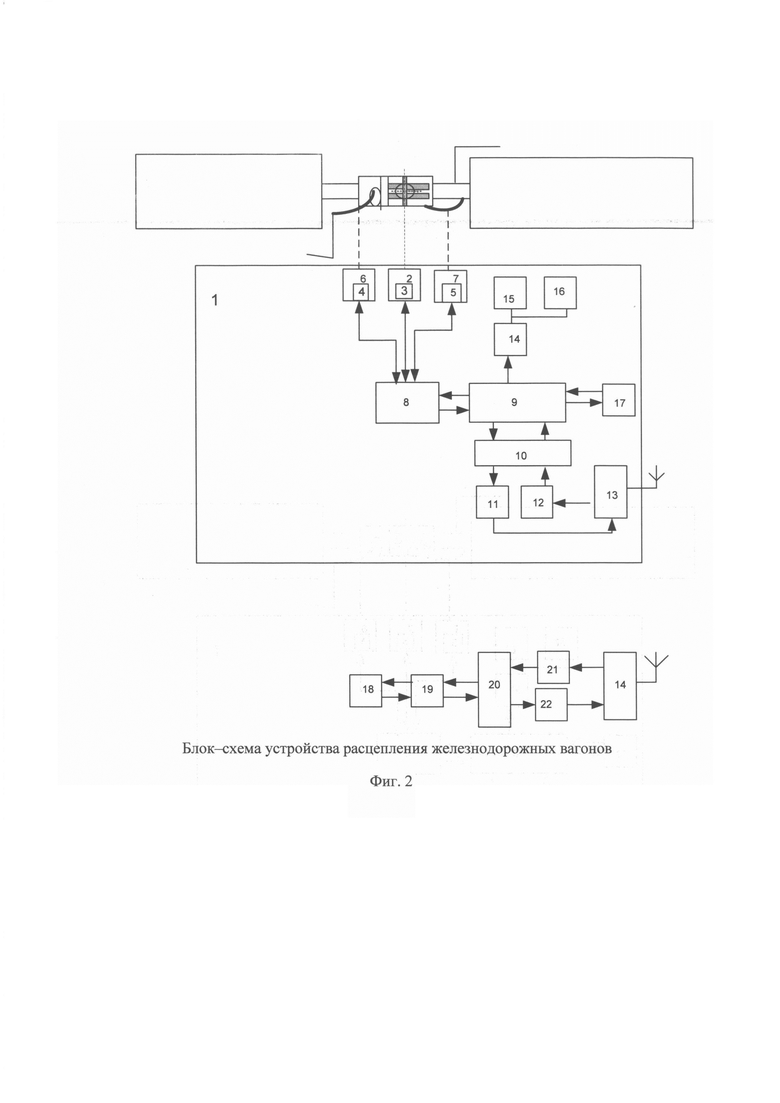
Предлагаемое изобретение иллюстрируется чертежом, приведенном на Фиг. 1, на котором изображена автосцепка и указаны основные элементы, на которые производится прицеливание и силовое воздействие в процессе расцепления, на Фиг. 2 изображена блок-схема заявляемого устройства.
«Осуществление изобретения»
На чертеже, приведенном на Фиг. 1, а обведены кружками с пунктирной линией элементы автосцепки на которые осуществляется прицеливание и последующее наведение устройства расцепления. На каретке 1 установлены видеокамера 2 в процессе прицеливания устанавливается строго перпендикулярно оси пути надвига удерживая в прицеле перекрестье трех усиливающих ребер (верхнего, среднего и нижнего) большой зуба автосцепки. Видеокамера 2 совмещена с лазерный дальномером 3. Видеокамеры 4 и 5 роботов-манипуляторов установлены на каретке 1 на расстоянии Lpм примерно соответствующему расстоянию L между валиками подъемниками автосцепок в сжатом состоянии (только в сжатом состоянии возможно расцепление) плюс средняя длина цепочки валика подъемника (во внимание принимается верхняя цепочка при наличии двух цепочек) Lрм=L+Lцеп. верх см. Фиг. 1.
Блок-схема предлагаемого устройства, приведенная на Фиг. 2, содержит видеокамеру 2, расположенную соосно с лазерный дальномером 3, видеокамеры 4 и 5 расположенные соосно с роботами - манипуляторами 6 и 7 соответственно, перечисленные выше устройства связанные двухсторонней связью через блок 8 согласующих устройств с бортовым компьютером к которому через другое согласующее устройство 10 подключены кодер 11, связанный с выходом радиостанции 12, подключенной по радиоканалу к радиостанции 12 дежурного по горке, входы и выходы приемо-передающих трактов радиостанции 12 соединены через еще одно согласующее устройство 15 к стационарной части системы телеуправления горочным локомотивом (ГАЛС Р) 16, подключенной к автоматизированному рабочему месту оператора сортировочной горки 17.
Работа заявляемого устройства протекает следующим образом. До начала роспуска состава карета 1 занимает положение, соответствующее ее статусу. Если каретка предназначена для расцепления коротких оцепов (1-5 вагонов), то она устанавливается (занимает исходную позицию, соответствующую окончанию последней операции расцепления предыдущего состава). Вторая каретка, предназначенная для расцепления длинных отцепов располагается аналогичным образом. До начала надвига состава видеокамеры 2, дальномер 3, видеокамеры 4 и 5 расположенные соосно с роботами - манипуляторами 6 и 7и сами роботы - манипуляторы 6 и 7 выключены по питанию по команде через согласующее устройство 8, переданной бортовым компьютером 9. Сам бортовой компьютер 9 ведет обмен информацией посредством подключенных через согласующее устройство 10 кодера 11 и декодера 12, радиостанции 13 с радиостанцией дежурного по горке 14. Подключенные к бортовому компьютеру 9 блок коррекции движения 14 отрабатывает команду «Стоп» и отключает по питанию электродвигатель исполнительного механизма движения каретки 15 и включает тормозные устройства 16. Блок корректирующих характеристик 17 также находится в режиме ожидания. При начале нового надвига состава на горку с автоматизированного рабочего места дежурного по горке 18 поступает управляющая информация в систему ГАЛС Р 19, которая передается через согласующее устройство 20 и кодер 21 на вход передатчика радиостанцией дежурного по горке 14, с выхода приемника последней через декодер 22 поступает ответная информация от бортового компьютера 9. Таким образом, в интервале между роспуском составов имеется возможность проводить совершенно безопасно профилактические работы по обслуживанию устройства расцепления. С момента начала надвига, примерно за 30 -40 с до начала фактической работы включаются по команде от бортового компьютера 9 в блоке исполнительных механизмов 15 звуковые и световые сигнализаторы, предупреждающие об окончании времени профилактических работ. По этому сигналу работники, выполняющие профилактические работа должны покинуть опасную зону. Каретка 1 дает звуковой сигнал и включается внешнее предупредительное освещение (на схеме не показано). Каретка 1 по команде бортового компьютера 9 откорректированного блоком коррекции движения каретка 14 посредством исполнительного механизма перемещения 15 выдвигается к началу зона оптимального расцепления первого отцепа, предварительно разблокируются тормозные устройства 16. Выбор позиции осуществляется бортовым компьютером 9 на основании информации, получаемой от системы ГАЛС Р с тем расчетом, чтобы к моменту подхода автосцепки, которую следует расцепить каретка 1 успела набрать скорость и ускорение, равное скорости и ускорению вагонов состава. Такая синхронизация становится возможной за счет подключения к бортовому компьютеру 9 блока корректирующих характеристик 17 в котором хранится информация об изменении во времени ускорения состава определенной массы при заданной начальной скорости локомотива. Такая информация (обучающего характера) накапливается до первого использования устройства для расцепления и позволяет предельно точно согласовать скорости вагонов состава и каретки 1 к моменту начала расцепления. Дополнительная корректировка положения каретки 1 относительно расцепляемых автосцепок обеспечивается видеокамерой 2, распознающей процессе прицеливания перекрестье трех усиливающих ребер (верхнего, среднего и нижнего) большой зуба автосцепки. Повышению достоверности работы видеокамеры 2 способствует измерение расстояния до точки прицеливания лазерным дальномером 3. Полученные видеокамерой 2 и лазерным дальномером 3 результаты передаются через согласующее устройство 8 в бортовой компьютер 9, который принимает окончательное решение. Сюда же приходят информационные сигналы от видеокамер 4 и 5. На основании обобщенной информации бортовой компьютер 9 включает исполнительные механизмы роботов - манипуляторов 6 и 7 и вносит коррективы в их работу в зависимости от загрузки смежных расцепляемых вагонов и конструктивных особенностей автосцепок (одна или две цепочки валика подъемника). Робот - манипулятор 6 воздействует на ближнюю цепочку автосцепки и совершает вращательное движение «против часовой стрелки», а робот - манипулятор 7 воздействует на дальнюю цепочку автосцепки, совершая вращательное движение «по часовой стрелке». За счет такой кинематической схемы дестабилизирующее воздействие на параметры движения каретки 1 будет минимальным, а надежность расцепления существенно увеличится. После регистрации поворота валика подъемника автосцепки манипуляторы возвращаются в исходное транспортное положение и цикл расцепления повторяется.
Список использованных источников
1. Патент на изобретение «Устройство для расцепления железнодорожных вагонов» №872352 по кл. МПК B61G 7/04(2006.01) опубл. 1981.10.15 Авторы: Анненков Анатолий Митрофанович и другие.
2. Патент на изобретение «Устройство авторасцепки грузовых вагонов» №2379206 (51) МПК B61G 1/00 (2006/01) опубл. в Бюл. №2 от 20.01.10 г.
3. Патент на изобретение «Система авторасцепки вагонов на сортировочной горке» №2450946 по кл. МПК B61G 7/04. Авторы: Свердлов Вадим Борисович (RU), Акмалов Сабит Гайданиевич (RU), Иргер Григорий Юльевич (RU) опубл. в Бюл. №4 от 20.05.2012 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО РАСЦЕПЛЕНИЯ АВТОСЦЕПОК ДВИЖУЩИХСЯ ВАГОНОВ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2728968C1 |
| СИСТЕМА АВТОРАСЦЕПКИ ВАГОНОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2010 |
|
RU2450946C1 |
| УСТРОЙСТВО АВТОРАСЦЕПКИ ГРУЗОВЫХ ВАГОНОВ | 2008 |
|
RU2379206C1 |
| Устройство для повышения безопасности и надежности расцепления вагонов состава на отцепы на сортировочной горке | 2019 |
|
RU2714627C1 |
| Устройство для автоматического расцепления вагонов | 1978 |
|
SU713738A1 |
| Устройство для автоматического расцепления вагонов на сортировочной горке | 1973 |
|
SU901124A1 |
| Устройство для расцепления вагонов | 1980 |
|
SU977254A1 |
| Устройство автоматического расцепления железнодорожных вагонов | 1989 |
|
SU1766749A1 |
| СПОСОБ РАСЦЕПЛЕНИЯ ВАГОНОВ | 1966 |
|
SU223132A1 |
| Устройство для автоматического расцепления вагонов | 1989 |
|
SU1722923A1 |
Изобретение относится к средствам автоматического расцепления грузовых вагонов. Устройство представляет собой передвижной роботизированный комплекс, содержащий видеокамеру, расположенную соосно с лазерный дальномером, две другие видеокамеры, расположенные соосно с двумя роботами-манипуляторами, осуществляющими одновременное воздействие на валики подъемников автосцепок. Синхронизация движения роботизированного комплекса с надвигаемым на горку составом обеспечивается за счет подключения к бортовому компьютеру блока корректирующих характеристик, в котором хранится информация об изменении во времени ускорения состава определенной массы при заданной начальной скорости. Такая корректировка при наличии априорной информации о режимах работы локомотива, передаваемая от системы управления горочным локомотивом, позволяет согласовать скорости вагонов состава и роботизированного комплекса к моменту начала расцепления. Достигается повышение надежности операции расцепления в автоматическом режиме. 3 ил.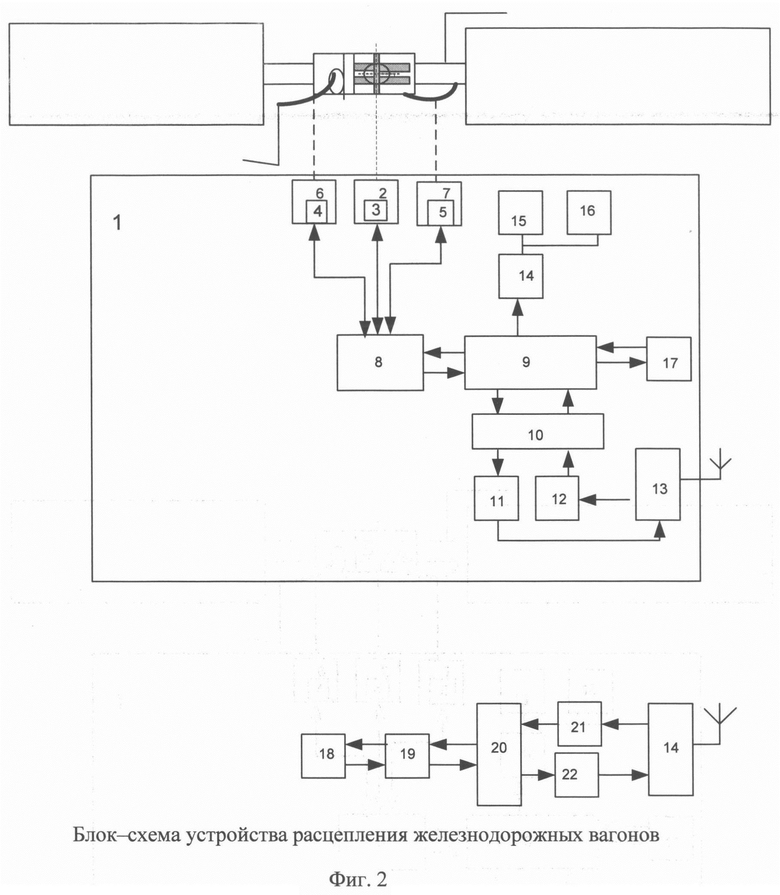
Устройство для расцепления железнодорожных вагонов, содержащее выполненную с возможностью перемещения относительно подлежащих расцеплению грузовых вагонов каретку с установленным на ней манипулятором с приводом и оптико-электронной системой, выходы которой подключены к блоку коррекции скорости каретки относительно вагонов и блоку распознавания и координат расцепного узла, отличающееся тем, что оно снабжено двумя роботами-манипуляторами и тремя видеокамерами: первая расположена межу роботами-манипуляторами соосно с лазерным дальномером, две другие видеокамеры расположены соосно с роботами-манипуляторами, установленными на каретке на определенном расстоянии вдоль продольной оси каретки, причем перечисленные выше устройства связаны двухсторонней связью через согласующее устройство с бортовым компьютером, к которому через другое согласующее устройство подключен кодер, связанный с выходом радиостанции, подключенной по радиоканалу к радиостанции дежурного по горке, входы и выходы приемо-передающих трактов радиостанции последнего соединены через еще одно согласующее устройство со стационарной частью системы телеуправления горочным локомотивом, подключенной к автоматизированному рабочему месту оператора сортировочной горки, к бортовому компьютеру подключен также блок корректирующих характеристик, в котором хранится информация об изменении во времени ускорения состава определенной массы при заданной начальной скорости локомотива, к другому входу компьютера последовательно подключены блок коррекции движения каретки, исполнительный механизм перемещения каретки и тормозные устройства каретки.
| СИСТЕМА АВТОРАСЦЕПКИ ВАГОНОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2010 |
|
RU2450946C1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| УСТРОЙСТВО АВТОРАСЦЕПКИ ГРУЗОВЫХ ВАГОНОВ | 2008 |
|
RU2379206C1 |
| CN 110843844 A, 28.02.2020 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

