Способ автоматического расцепления автосцепок движущихся вагонов и устройство его осуществления (далее - устройство расцепления) относится к железнодорожной области техники, а конкретно к специальным путевым устройствам, работающим с вагонами при их роспуске на сортировочных горках.
По уровню техники устройство расцепления относится к комплексу устройств автоматического расцепления вагонов, например грузовых вагонов железнодорожного состава при надвиге на сортировочную горку в процессе расформирования состава.
Данное предложение является промышленно применимым, так как при конструировании устройства расцепления использовались известные в мировой технике конструктивные элементы, способы и приемы.
Из сведений об уровне техники существующих аналогичных устройств известно «Устройство для автоматического расцепления автосцепок движущихся вагонов» RU №2410262 от 24.11.2009 г., содержащее исполнительный механизм и механизм поиска.
Исполнительный механизм установлен на корпусе автосцепки и выполнен в виде большого и малого держателей силового элемента в форме полого цилиндра из сплава с памятью формы, с охватывающим его электрическим нагревателем и двумя возвратными пружинами.
Механизм поиска выполнен в виде упругого токопроводящего стержня с ограничителем отклонения, который размещен на токоприемной площадке, установленной в нижней части хвоста автосцепки. Упругий токопроводящий стержень с одной стороны взаимодействует с площадкой, с другой подключен к источнику питания через ключ.
Недостатком данного устройства является низкая надежность из-за большого количества деталей взаимодействующих между собой в короткий промежуток времени. Кроме этого, к недостаткам данного решения можно отнести необходимость внесения изменений в существующую конструкцию автосцепки, что может негативно повлиять на надежность самой автосцепки.
Известно аналогичное техническое решение на устройство «Система авторасцепки вагонов на сортировочной горке» RU №2450946 от 14.12.2010 г. Система содержит выполненную с возможностью перемещения относительно подлежащих расцеплению вагонов каретку. На каретку установлены манипулятор и оптико-электронная система, сигналы которой используются для определения скорости и координат расцепного узла. Оптико-электронная система содержит цифровую телекамеру, компьютер и блок обработки изображения. Кроме этого, система содержит измеритель скорости и счетчик осей, связанные каналами связи с компьютером.
Данное техническое решение - аналог, относится к системам, которые не требуют дополнительного оборудования вагонов. Системы, не требующие дополнительного оборудования вагонов, можно разделить на два класса: стационарные устройства и передвижные устройства.
Для надежного расцепления валик подъемника автосцепки необходимо не только повернуть, но и удерживать в расцепленном положении в течение 0,15-0,2 с. При скорости надвига 2 м/с за это время вагон пройдет 0,3-0,4 м. и устройство потеряет контакт с автосцепкой.
Передвижные устройства, воздействующие на расцепной привод, в отличие от стационарных позволяют производить расцепление вагонов при более высоких скоростях надвига. Это связано с тем, что разница скоростей устройства расцепления и надвигаемых вагонов равна нулю и все операции по расцеплению производятся как бы в статическом состоянии.
Система, аналог к предлагаемому техническому решению, работает следующим образом.
На основании данных сортировочного листа, до начала надвига компьютером формируется программа роспуска состава, которая определяет последовательность отцепов и число вагонов в отцепах. Эта же программа вырабатывает стратегию расцепки, учитывающую скорость надвига, максимальную скорость каретки, максимальное ускорение и замедление каретки, а также минимальное расстояние от расцепляемой автосцепки до горба горки для надежного расцепления.
При приближении распускаемого состава к позиции, где расположена система, находящийся рядом на пути счетчик осей подсчитывает оси и передает эту информацию в бортовой компьютер соответствующей каретки. В компьютере производится вычисление координаты нужной автосцепки и величины и направления требуемой скорости передвижения каретки с тем, чтобы встреча каретки и автосцепки произошла в расчетной точке пути.
После этого бортовой компьютер выдает сигнал блоку управления двигателем передвижения каретки на начало движения. Каретка начинает движение в сторону расчетной точки встречи с требуемой автосцепкой.
Оптико-электронная система, состоящая из цифровой видеокамеры и компьютера, установленная на каретке, получает непрерывное изображение движущегося вагона и распознает изображение автосцепки, к которой необходимо осуществить движение данной каретки. Затем подсчитывает количество автосцепок (вагонов), мимо которых каретка должна проследовать без остановки, а при приближении к заданной автосцепке выдает сигнал на выравнивание скорости каретки и состава. Каретка начинает движение со скоростью надвига. Цифровая видеокамера, установленная на каретке, захватывает изображение нужной автосцепки и выдает сигналы для наведения каретки точно напротив нужной автосцепки, а затем, для наведения вилки манипулятора на цепочку автосцепки. Вилка манипулятора выдвигается, захватывает цепочку, поворачивается и задвигается в исходное положение. На поворот вилки и на возвращение ее в исходное положение команду выдает бортовой компьютер. Расцепка произведена. Бортовой компьютер выдает блоку управления кареткой команду на торможение каретки и движение ее назад в исходное положение для следующей отцепки.
Бортовой компьютер получает сигнал от измерителя скорости, установленного за горбом горки, и от измерителя скорости, установленного на пути надвига, сравнивает скорости отцепа и надвига, выдает сигнал о состоявшемся или несостоявшемся расцеплении. В последнем случае подает сигнал машинисту горочного локомотива.
Данное техническое решение послужило аналогом к предложенному устройству расцепления.
Недостатком конструкции выбранного аналога является то, что при установке манипулятора на каретке, которая движется по соседнему дополнительному пути, расстояние от захвата манипулятора до расцепной цепи валика подъемника автосцепки расцепляемого вагона слишком большое - более половины ширины вагона. Такая геометрическая схема не является оптимальной, так как из-за большой консоли конструкция манипулятора становится громоздкой и тяжеловесной, что негативно скажется на быстродействии и точности выполняемой операции расцепки. Кроме этого, в случае неудачной попытки расцепки нет возможности произвести расцепку с другой стороны через вторую автосцепку, находящуюся в зацеплении с первой.
В предлагаемом способе расцепления используют тележку с манипулятором (далее тележка), размещаемую внутри железнодорожной колеи с возможностью перемещения по оси пути непосредственно под автосцепками в габарите подвагонных устройств, определяют последовательность отцепов и число вагонов в отцепах, выбирают стратегию расцепки с учетом скорости надвига, максимальной скорости тележки, максимального ускорения и замедления тележки, а также минимального расстояния от расцепляемой автосцепки до горба горки, при приближении распускаемого состава к позиции осуществления автоматического расцепления определяют координаты нужной автосцепки и величины требуемой скорости передвижения и направления перемещения тележки с тем, чтобы встреча тележки и автосцепки произошла в расчетной точке, при движении вагона выполняется распознавание изображения автосцепки, подсчитывается количество автосцепок, мимо которых тележка должна проследовать без остановки, а при приближении к заданной автосцепке осуществляется выравнивание скорости тележки с составом, выполняется позиционирование тележки точно напротив нужной автосцепки для наведения вилки манипулятора на цепочку автосцепки, вилка манипулятора выдвигается, захватывает цепочку, поворачивается и производит расцеп, далее обеспечивается возвращение манипулятора в исходное положение.
Предлагаемый способ и конструктивная схема позволяют выполнить манипулятор с минимальным вылетом, более жесткой конструкции и удобным наведением на автосцепку с возможностью производить расцепление через любую из двух автосцепок, находящихся в зацеплении. Манипулятор имеет два положения:
- транспортное, в сложенном состоянии в габарите подвагонных устройств при движении под вагонами к расцепляемой автосцепке;
- рабочее, выдвинутое при наведении и расцеплении автосцепок.
Манипулятор установлен на тележке с приводом, обеспечивающим перемещение тележки вдоль состава в обоих направлениях на участке надвига вагонов, причем колеса тележки опираются на внутреннюю грань подошвы рельса. Возможна и установка своей колеи для тележки внутри основной железнодорожной колеи.
Техническим результатом, разработанного способа и устройства, является возможность расцепки движущихся вагонов между собой без физического участия человека.
Качественными показателями при использовании предложенного технического решения являются:
- компактность устройства (не надо дополнительного места для установки, все размещается внутри ж/д колеи);
- устранение большой консоли манипулятора;
- упрощение кинематической схемы манипулятора;
- увеличение быстродействия срабатывания захвата (вилки) за счет оптимизации траектории его (ее) движения;
- улучшение условий наведения вилки манипулятора на расцепную цепь валика подъемника автосцепки.
Как следствие достигаемого технического результата, общественно-полезным эффектом при использовании предлагаемой конструкции устройства расцепления является устранение опасных факторов, связанных с нахождением человека в зоне непосредственной близости с движущимися вагонами, что представляет угрозу его жизни и здоровья, то есть, обеспечивается улучшение условий труда. Кроме этого, создается возможность поместить человека для контрольных функций в помещение, обеспечить более комфортные условия труда даже при неблагоприятных климатических условиях (дождь, снег, ветер), что снизит утомляемость и способствуют повышению производительности труда.
Технический результат от использования предлагаемого способа и устройства расцепления достигается за счет специальной конструкции устройства, которое в своем составе содержит:
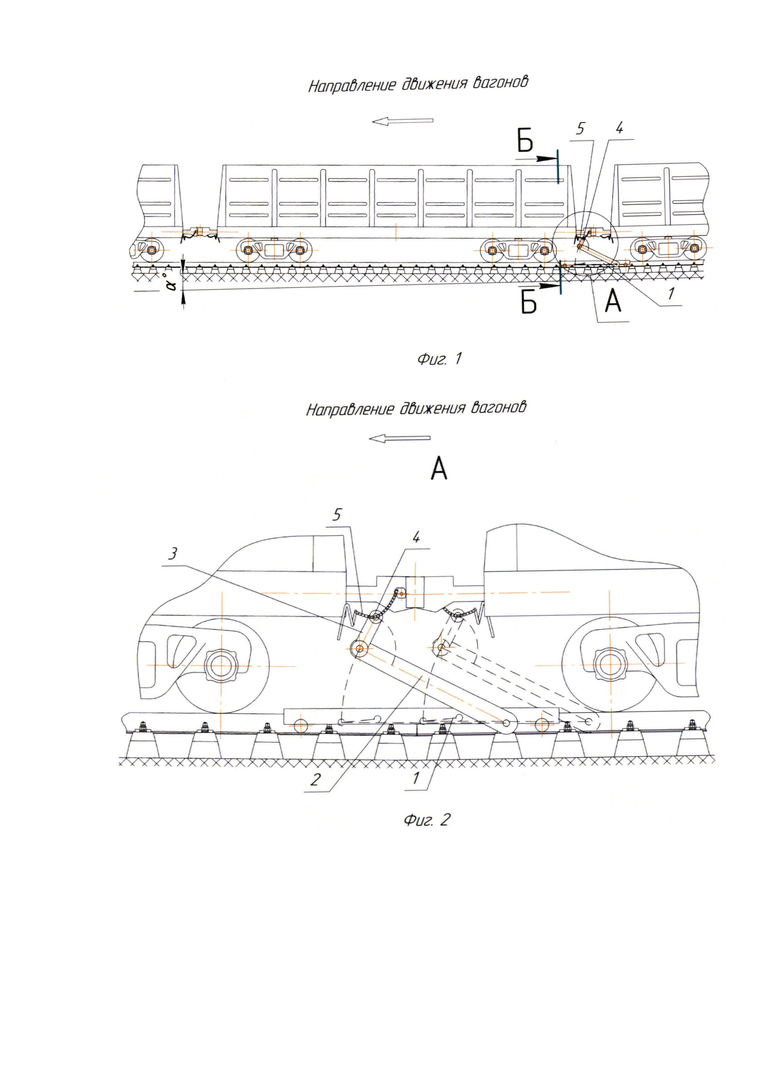
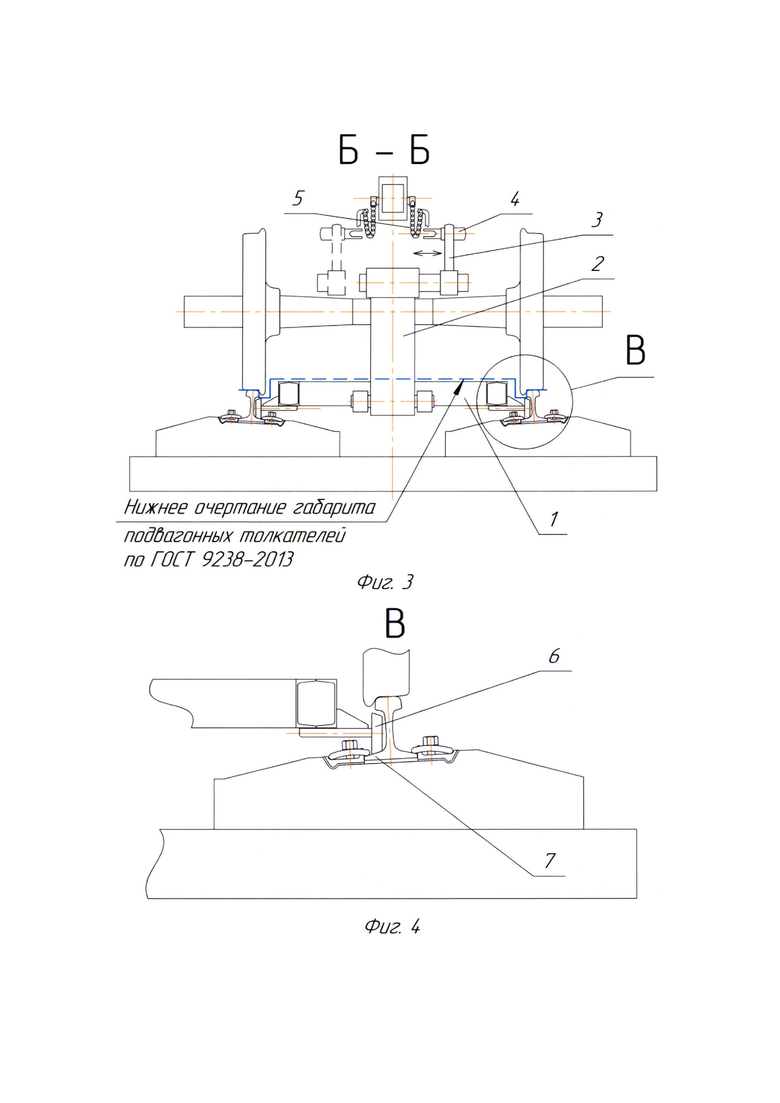
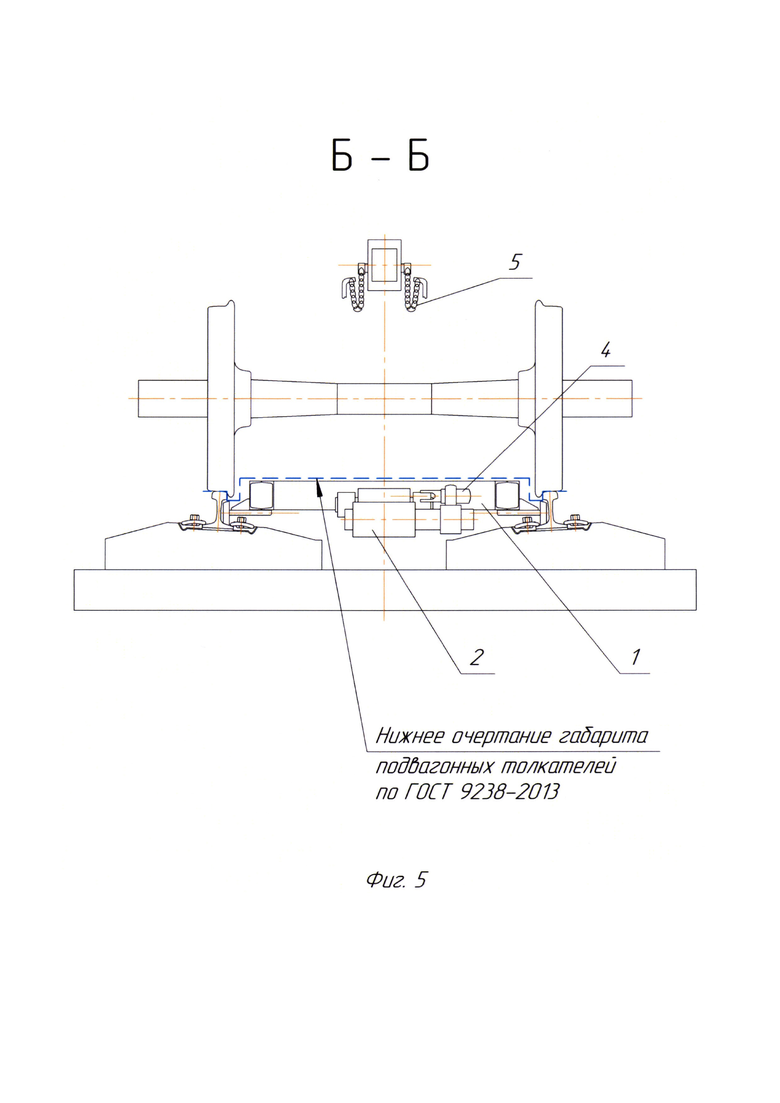
Тележка - 1, Большой рычаг манипулятора - 2, Малый рычаг манипулятора - 3, Оптико-электронная система - 4, Расцепная цепь валика подъемника автосцепки - 5, Опорное колесо тележки - 6, Внутренняя грань подошвы рельса как направляющая поверхность перемещения тележки - 7. Техническая сущность, предлагаемой конструкции, и ее устройство, поясняется рисунком Фиг. 1, 2 (Рабочее положение), Фиг. 3 (Поперечное сечение устройства в рабочем положении), Фиг. 4 (Опорное колесо), Фиг. 5 (Поперечное сечение устройства в сложенном транспортном положении).
В предлагаемой конструкции тележка 1, имеющая свой привод, может перемещаться внутри железнодорожной колеи в двух направлениях. На тележке 1 установлен манипулятор, имеющий большой рычаг - 2 и малый рычаг - 3, а также оптико-электронную систему - 4.
Порядок работы предлагаемого устройства в соответствии с описанным способом расцепления заключается в том, что после получения данных сортировочного листа определяют последовательность отцепов и число вагонов в отцепах и тележка из исходного положения после начала роспуска перемещается к первой расцепке.
Предлагаемое устройство расцепления функционирует на участке надвига перед горбом горки на подъеме (Фиг. 1, угол подъема - α°). Длина участка надвига составляет 70-80 м. В исходном положении тележка находится в начале участка надвига и после начала роспуска в расчетный момент начинает ускоренное движение к требуемой автосцепке, в нужный момент происходит выравнивание скоростей вагона и тележки, после этого наведение вилки манипулятора на расцепную цепь валика подъемника автосцепки - 5, захват цепи, поворот вилки на определенный угол, кратковременная задержка для расцепки. Далее в обратном порядке - поворот вилки на тот же угол в обратную сторону, выведение ее из зацепления и складывание малого - 3 и большого - 4 рычагов манипулятора (Фиг. 2) в транспортное положение (Фиг. 5) и возврат тележки в исходное положение, либо к следующей автосцепке в соответствии с планом сортировочного листа.
Для обеспечения перемещения тележки внутри колеи применяются специальные рельсовые скрепления (Фиг. 3), позволяющие разместить опоры колеса тележки, а габарит тележки в транспортном положении выполнен в соответствии с ГОСТ 9238-2013. Таким образом, опорные колеса тележки - 6 катятся по внутренней грани подошвы рельса - 7 (Фиг. 4).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОРАСЦЕПКИ ВАГОНОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2010 |
|
RU2450946C1 |
| УСТРОЙСТВО АВТОРАСЦЕПКИ ГРУЗОВЫХ ВАГОНОВ | 2008 |
|
RU2379206C1 |
| УСТРОЙСТВО ДЛЯ РАСЦЕПЛЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2020 |
|
RU2732676C1 |
| Устройство автоматического расцепления железнодорожных вагонов | 1989 |
|
SU1766749A1 |
| Устройство для автоматического расцепления вагонов на сортировочной горке | 1973 |
|
SU901124A1 |
| Устройство для расцепления автосцепок железнодорожных вагонов | 1978 |
|
SU688363A1 |
| Способ перемещения мобильной платформы робототехнического комплекса, предназначенного для роспуска железнодорожного подвижного состава на сортировочной горке | 2024 |
|
RU2834370C1 |
| Устройство для расцепления железнодорожных вагонов | 1981 |
|
SU960059A1 |
| Устройство для автоматического расцепления вагонов | 1979 |
|
SU787227A1 |
| Устройство для автоматического расцепления железнодорожных вагонов | 1980 |
|
SU901125A1 |
Изобретение относится к специальным путевым устройствам, работающим с вагонами при их роспуске на сортировочных горках. Согласно изобретению, используют тележку, размещаемую внутри железнодорожной колеи с возможностью перемещения по оси пути непосредственно под автосцепками, определяют последовательность отцепов и число вагонов в отцепах, выбирают стратегию расцепки с учетом скорости надвига, максимальной скорости тележки, максимального ускорения и замедления тележки, а также минимального расстояния от расцепляемой автосцепки до горба горки. При приближении распускаемого состава к позиции осуществления автоматического расцепления определяют координаты нужной автосцепки и величины и направления требуемой скорости передвижения тележки с тем, чтобы встреча тележки и автосцепки произошла в расчетной точке. При движении вагона выполняется распознавание изображение автосцепки, подсчитывается количество автосцепок, мимо которых тележка должна проследовать без остановки, а при приближении к заданной автосцепке осуществляется выравнивание скорости тележки с составом, выполняется наведения тележки точно напротив нужной автосцепки для наведения вилки манипулятора на цепочку автосцепки. Вилка манипулятора выдвигается, захватывает цепочку, поворачивается и производит расцеп. Далее обеспечивается возвращение манипулятора в исходное положение, а при неудачной попытке расцепления есть возможность произвести расцепку через вторую автосцепку, находящуюся в зацеплении с первой. В результате манипулятор выполнен с минимальным вылетом, более жесткой конструкции и удобным наведением на автосцепку, устраняется большая консоль манипулятора, упрощается кинематическая схема, увеличивается быстродействие срабатывания вилки захвата за счет оптимизации траектории ее движения. 2 н. и 3 з.п. ф-лы, 5 ил.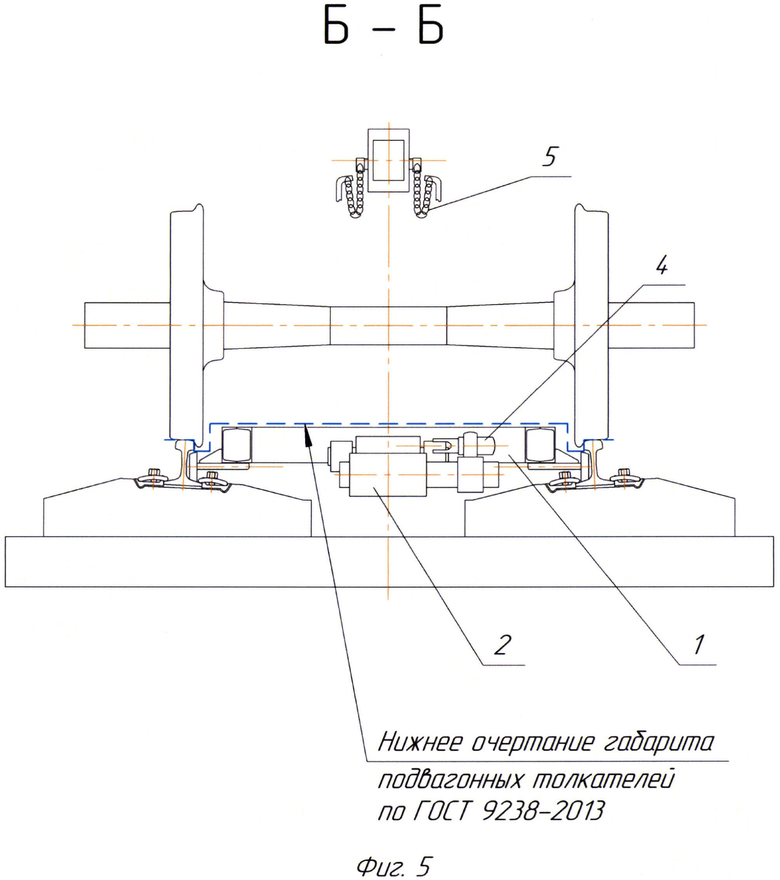
1. Способ автоматического расцепления автосцепок движущихся вагонов на сортировочной горке с тележкой, выполненной с возможностью перемещения относительно подлежащих расцеплению вагонов, отличающийся тем, что используют тележку, размещаемую внутри железнодорожной колеи с возможностью перемещения по оси пути непосредственно под автосцепками в габарите подвагонных устройств, определяют последовательность отцепов и число вагонов в отцепах, выбирают стратегию расцепки с учетом скорости надвига, максимальной скорости тележки, максимального ускорения и замедления тележки, а также минимального расстояния от расцепляемой автосцепки до горба горки, при приближении распускаемого состава к позиции осуществления автоматического расцепления определяют координаты нужной автосцепки и величины требуемой скорости передвижения и направления перемещения тележки с тем, чтобы встреча тележки и автосцепки произошла в расчетной точке, при движении вагона выполняется распознавание изображения автосцепки, подсчитывается количество автосцепок, мимо которых тележка должна проследовать без остановки, а при приближении к заданной автосцепке осуществляется выравнивание скорости тележки с составом, выполняется наведение тележки точно напротив нужной автосцепки для наведения вилки манипулятора на цепочку автосцепки, вилка манипулятора выдвигается, захватывает цепочку, поворачивается и производит расцеп, далее обеспечивается возвращение манипулятора в исходное положение.
2. Способ по п. 1, отличающийся тем, что управление осуществляют с помощью программных средств.
3. Устройство осуществления автоматического расцепления автосцепок движущихся вагонов на сортировочной горке, выполненное на тележке, размещенной внутри железнодорожной колеи с возможностью перемещения по оси пути непосредственно под автосцепками, на которой размещены манипулятор и оптико-электронная система, сигналы которой используются для определения скорости и координат расцепного узла относительно манипулятора.
4. Устройство по п. 3, отличающееся тем, что тележка с манипулятором выполнена с опорными колесами, имеющими возможность катиться по внутренней грани подошвы рельса.
5. Устройство по п. 3, отличающееся тем, что манипулятор выполнен с большим и малым рычагами, позволяющими оптимизировать траекторию перемещения вилки захвата с возможностью производить расцепление вагонов через любую из двух автосцепок, находящихся в зацеплении.
| СИСТЕМА АВТОРАСЦЕПКИ ВАГОНОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2010 |
|
RU2450946C1 |
| Устройство для автоматического расцепления вагонов движущихся поездов | 2018 |
|
RU2700208C1 |
| Устройство для автоматического расцепления вагонов | 1989 |
|
SU1722923A1 |
| Устройство для расцепления железнодорожных вагонов | 1989 |
|
SU1736797A1 |
| JP S5137410 A, 29.03.1976. | |||

