Изобретение относится к устройствам автоматического расцепления вагонов, например грузовых вагонов железнодорожного состава при надвиге на сортировочную горку в процессе расформирования состава.
Известно устройство для расцепления железнодорожных вагонов, содержащее перемещающуюся параллельно рельсовому пути по направляющей тележку, несущую расцепной механизм, воздействующий с помощью машиниста на расцепной узел автосцепки, причем направляющая смонтирована на колоннах, расположенных вдоль рельсового пути, а расцепной механизм установлен в кабине, подвешенной к тележке с возможностью вертикального перемещения (а.с. СССР №663618, МПК2: B61G 7/04, опубл. БИ №19 за 1979 г.) - аналог.
Недостатками известного решения являются низкая скорость сортировки вагонов и невозможность осуществления расцепления вагонов в автоматическом режиме.
Известно устройство автоматической расцепки грузовых вагонов на сортировочной горке, состоящее из движущейся в междупутье параллельно рельсовому пути каретки, на которой установлены манипулятор и видеосистема, причем для определения скорости и координаты расцепного узла используются сигналы видеосистемы, закрепленной на каретке (патент РФ №2379206, МПК: B61G 1/00, опубл. 20.01.2010 г.) - аналог.
Недостатком известного решения является низкая производительность сортировочной горки.
Техническим результатом, на достижение которого направлено заявляемое решение, является повышение надежности, эффективности и производительности работы сортировочной горки, в том числе имеющей один путь надвига.
Указанный технический результат достигается тем, что в системе авторасцепки вагонов на сортировочной горке, содержащей выполненную с возможностью перемещения вдоль подлежащих расцеплению грузовых вагонов, по меньшей мере, одну каретку, на которой установлены манипулятор и оптико-электронная система, сигналы которой используются для определения скорости и координат расцепного узла, количество кареток Н для одного пути надвига определяется из соотношения Н≥ТВ/ТП, где ТВ - продолжительность цикла расцепки от начала расцепки Nk до возврата каретки после окончания расцепки Nk на исходную позицию начала следующей расцепки, ТП - время от начала расцепки Nk до подхода следующей отцепляемой группы вагонов Nk+1 на исходную позицию начала расцепки Nk+1, а манипулятор и видеосистема размещены на каждой каретке.
Система, характеризующаяся тем, что может быть снабжена эстакадой или монорельсом, установленными на опорах вдоль рельсового пути, но необязательно параллельно ему, причем эстакада может быть выполнена в виде участка узкоколейного пути.
Система, характеризующаяся тем, что оптико-электронная система может содержать установленные на каретке цифровую телекамеру, бортовой компьютер и блок обработки изображения.
Система, характеризующаяся тем, что может содержать измеритель скорости и счетчик осей, установленные на пути надвига и связанные каналами связи с бортовым компьютером.
Система, которая может содержать измеритель скорости, установленный за горбом горки и связанный каналом связи с бортовым компьютером.
Устройство авторасцепки грузовых вагонов (АРУ) предназначено для использования на автоматизированных и механизированных сортировочных горках для механизации и автоматизации расцепки вагонов - единственной ручной операции в процессе роспуска состава.
Заявляемая система расцепления вагонов относится к системам, которые не требуют дополнительного оборудования вагонов. Системы, не требующие дополнительного оборудования вагонов, можно разделить на два класса: стационарные устройства и передвижные устройства.
Для надежного расцепления валик подъемника автосцепки необходимо не только повернуть, но и удерживать в расцепленном положении в течение 0,15-0,2 с. При скорости надвига 2 м/с за это время вагон пройдет 0,3-0,4 м и устройство потеряет контакт с автосцепкой.
Передвижные устройства, воздействующие на расцепной привод, в отличие от стационарных позволяют производить расцепление вагонов при более высоких скоростях надвига. Это связано с тем, что разница скоростей устройства расцепления и надвигаемых вагонов равна нулю и все операции по расцеплению производятся как бы в статическом состоянии.
Из уровня техники известны передвижные устройства расцепления вагонов подвижного состава, однако они не способны обеспечить высокую надежность и эффективность работы на сортировочных горках, например, при параллельном или параллельно-последовательном роспуске на них составов.
Наиболее благоприятные условия для расформирования составов на сортировочной горке в режиме параллельного роспуска имеются на односторонних сортировочных станциях. Организация параллельного роспуска предъявляет ряд требований к техническим средствам станции и их использованию, а именно:
- на горке должно быть не менее двух путей надвига и два пути роспуска. Для уменьшения горочного интервала могут применяться схемы горочных горловин с увеличенным числом путей надвига (три-четыре пути);
- сортировочный парк должен быть разделен на две части, каждая из которых строго специализируется для вагонопотоков одного направления движения;
- в каждой части сортировочного парка выделяется по одному отсевному пути для угловых вагонопотоков;
- управление работой горки должно быть централизованным с одного поста и обеспечивать при правильном роспуске независимое управление процессом роспуска на каждом из горочных путей и соответствующей части сортировочного парка.
Приведенным выше условиям соответствуют не все станции сортировки и сортировочные горки. Кроме того, вагоны углового потока распределяются неравномерно по прибывающим в расформирование составам. Отдельные составы поездов, содержащие более 20-25% вагонов углового потока, не выгодно расформировывать в режиме параллельного роспуска и целесообразно расформировывать их в режиме последовательного роспуска. Таким образом, практически горка работает в режиме параллельно-последовательного роспуска.
При параллельно-последовательном и последовательном роспуске состава для повышения эффективности и надежности работы горки целесообразно использовать не одиночное устройство для авторасцепки, а заявляемую систему.
Исходя из условий энергетического обеспечения работы каретки с установленным на ней оборудованием, ход движения каретки, как правило, ограничен 70 м, что позволяет осуществлять расцепку максимум 5 вагонов. В случае, если необходимо произвести расцепку, например, 8 вагонов одной каретки не хватит, т.к. каретка просто не успеет вернуться на исходную позицию к началу следующей расцепки. Количество кареток (одна, две, три …n, и т.д.) с оборудованием в заявляемой системе определяется в зависимости от ряда параметров (скорости движения вагонов, количества расценок в составе и вагонов в расцепке и т.д.) и определяется в каждом конкретном случае.
Заявителем проведены исследования, направленные на определение необходимого для надежной и эффективной работы количества кареток на одном пути надвига.
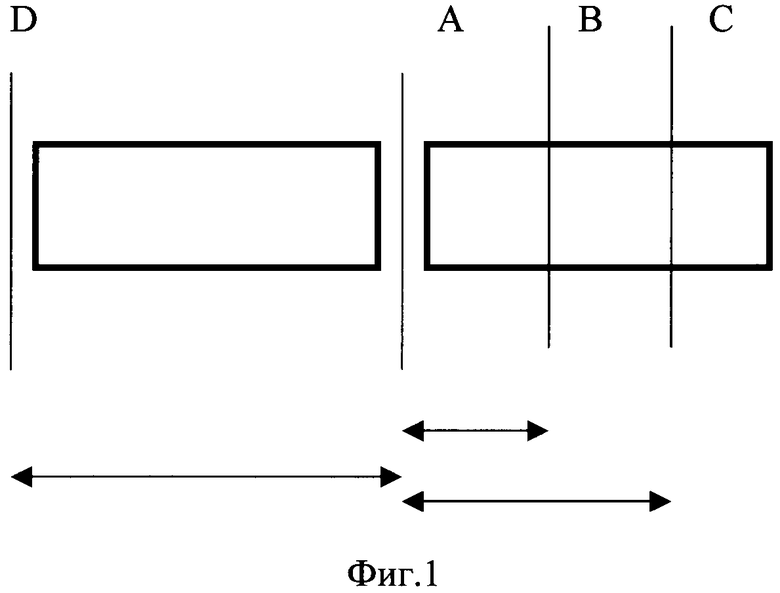
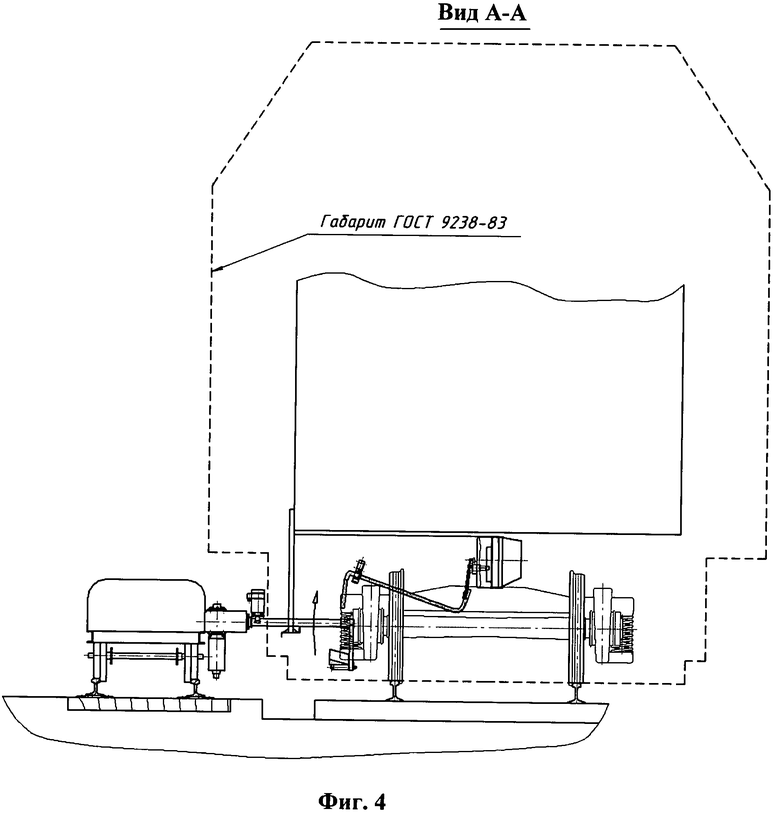
Заявляемое решение конкретизировано на фиг.1-3, где на фиг.1 приведена схема расцепления вагонов состава, на фиг.2 - схема размещения и работы двух кареток на одном пути надвига, а на фиг.3 - вид сверху на фиг.2, на фиг.4 - схема работы заявляемого устройства.
АВ - расстояние от места начала расцепки Nk до места окончания расцепки Nk.
ВС - расстояние от места окончания расцепки Nk до места окончания торможения каретки.
ДА - расстояние, которое пройдет ось автосцепки расцепа Nk+1 с момента начала расцепки Nk до окончания торможения каретки.
Н - необходимое количество кареток на одном пути надвига определяется исходя из условия Н≥ТВ/ТП.
ТВ - продолжительность цикла расцепки от начала расцепки Nk до возврата каретки после окончания расцепки Nk на исходную позицию начала следующей расцепки. На исходной позиции начала следующей расцепки скорость каретки должна быть равна скорости надвига.
ТВ=ТРАС+ТТОРМ+ТРАЗГОН.НАЗАД+ТДВИЖ.НАЗАД+ТТОРМ+ТРАЗГОН.ВПЕРЕД+ТДВИЖ.ВПЕРЕД.
ТРАС - продолжительность расцепки;
ТТОРМ - время торможения каретки после окончания расцепки;
ТРАЗГОН НАЗАД - время ускоренного движения каретки при разгоне назад;
ТДВИЖ. НАЗАД - время движения каретки при равномерном движении назад;
ТРАЗГОН ВПЕРЕД - время ускоренного движения каретки при разгоне вперед для расцепки;
ТДВИЖ. ВПЕРЕД - время движения каретки при равномерном движении вперед;
ТП - время от начала расцепки Nk до подхода следующей отцепляемой группы вагонов Nk+1 на исходную позицию начала расцепки Nk+1, определяется как ТП=LK/VH, где LK - расстояние между осями автосцепки одного расцепа, VH - скорость надвига.
Допускаемая скорость роспуска состава определяется конструкцией сортировочной горки, уровнем механизации и автоматизации процессов, характеристиками и сочетанием отцепов расформировываемого состава. Чем больше длина отцепа (до 6-7 вагонов) и его масса и чем ближе к вершине горки стрелка разделения маршрутов скатывания отцепов, тем более высокую скорость роспуска составов можно реализовать. В целях повышения перерабатывающей способности горки применяют режим переменной (или дифференцированной) скорости, регулируя скорость в процессе роспуска составов с учетом характеристик отцепов в составе и их сочетаний.
Каретка 1 заявляемой системы предназначена для передвижения авторасцепщика вдоль (но не обязательно параллельно) расцепляемого состава 2 и размещения на ней всего оборудования.
На каретке установлены узлы и детали, обеспечивающие ее перемещение (электропривод и двигатели), торможение (система торможения), управление синхронизацией перемещения, наведением механизма расцепления на расцепной привод и расцепление вагонов и т.д. Для отработки технологии расцепки на каретке может быть установлено рабочее место составителя-оператора.
Оптико-электронная система состоит из цифровой видеокамеры в термокожухе, устройства обработки изображения и бортового компьютера.
Видеокамера предназначена для визуального обнаружения элементов автосцепки (цепочки и расцепного привода).
Устройство обработки изображения - распознает изображение рычага или цепочки, находит их координаты и сообщает их бортовому компьютеру.
Бортовой компьютер выполняет следующие операции:
- вычисляет минимальное расстояние от горба горки до места расцепления, так, чтобы отцеп оставался сжатым;
- определяет номер вагона, подлежащего расцепу;
- вычисляет количество осей, мимо которых должна пройти каретка с манипулятором, чтобы манипулятор оказался напротив автосцепки вагона, подлежащего расцепу;
- определяет тип вагона по его номеру и вычисляет расстояние между осью его тележки и вертикальной осью автосцепки;
- выдает сигнал электродвигателю каретки на передвижение в сторону автосцепки вагона, подлежащего расцепу;
- вычисляет расстояние от горба горки до места, где нужно начать торможение каретки;
- получает сигнал о подходе каретки к месту начала торможения;
- выдает сигнал электродвигателю и тормозу каретки на торможение;
- выдает сигнал электродвигателю каретки на движение в сторону горба горки вместе с отцепляемым вагоном со скоростью вагона;
- выдает сигнал системе обработки визуальной информации: распознать изображение, найти цепочки или расцепной рычаг и прицелиться в них;
- выдает сигнал манипулятору цепочки или манипулятору рычага войти в контакт с цепочками или расцепным рычагом, произвести расцепку и вернуться в исходное положение.
В качестве бортового компьютера на этапе отработки технологии работы АРУ используется ноутбук промышленного назначения.
Принцип работы оптико-электронной системы УАРВ.
На основании сигналов от бортового компьютера, блок управления двигателями передвижения каретки управляет двигателями передвижения каретки с целью минимизации этого рассогласования, т.е. производится продольная наводка манипулятора. По окончании продольного наведения бортовой компьютер выдает блоку поперечной наводки манипулятора сигнал о величине рассогласования поперечной координаты положения манипулятора с поперечной координатой положением объекта воздействия манипулятора. На основании этих сигналов блок управления двигателями поперечной наводки манипулятора управляет двигателями поперечной наводки манипулятора с целью минимизации этого рассогласования, т.е. производится поперечная наводка манипулятора. По окончании поперечного наведения бортовой компьютер выдает блоку управления рабочим органом манипулятора сигнал произвести рабочий ход и обратный ход. По окончании обратного хода манипулятора бортовой компьютер выдает блоку поперечной наводки манипулятора сигнал вернуть механизм поперечной наводки в исходное положение.
Заявляемая система работает следующим образом.
До начала роспуска определяется требуемое количество кареток с установленной на них аппаратурой, а также вспомогательная аппаратура - измеритель скорости и счетчик осей, установленные на пути надвига и связанные каналами связи с бортовым компьютером, и измеритель скорости, установленный за горбом горки и связанный каналом связи с бортовым компьютером, в память компьютера АРУ заносятся данные сортировочного листа, где указаны типы вагонов, число осей и общее число вагонов в отцепе.
На основании данных сортировочного листа, до начала надвига компьютером формируется программа роспуска состава, которая определяет последовательность отцепов и число вагонов в отцепах. Эта же программа вырабатывает стратегию расцепки для каждой каретки, учитывающую скорости надвига, максимальную скорость каретки, максимальное ускорение и замедление каретки, а также минимальное расстояние от расцепляемой автосцепки до горба горки для надежного расцепления.
При приближении распускаемого состава к позиции, где расположена заявляемая система, находящийся рядом на пути счетчик осей подсчитывает оси и передает эту информацию в бортовой компьютер соответствующей каретки. В компьютере производится вычисление координаты нужной автосцепки и величины и направления требуемой скорости передвижения соответствующей каретки с тем, чтобы встреча каретки и автосцепки произошла в расчетной точке пути.
После этого бортовой компьютер выдает сигнал блоку управления двигателями передвижения соответствующей каретки на начало движения каретки. Каретка начинает движение в сторону расчетной точки встречи с требуемой автосцепкой.
Оптико-электронная система, состоящая из цифровой видеокамеры и компьютера, установленная на соответствующей каретке, получает непрерывно изображение движущегося вагона и распознает изображение автосцепки, к которой необходимо осуществить движение данной каретки. Затем подсчитывает количество автосцепок (вагонов), мимо которых соответствующая каретка должна проследовать без остановки, а при приближении к заданной автосцепке выдает сигнал на выравнивание скорости каретки и состава. Каретка начинает движение со скоростью надвига. Цифровая видеокамера, установленная на каретке, захватывает изображение нужной автосцепки и выдает сигналы для наведения каретки точно напротив нужной автосцепки, а затем, для наведения вилки манипулятора на цепочку автосцепки. Вилка манипулятора выдвигается, захватывает цепочку, поворачивается и задвигается в исходное положение. На поворот вилки и на возвращение ее в исходное положение команду выдает бортовой компьютер. Расцепка произведена. Бортовой компьютер выдает блоку управления кареткой команду на торможение каретки и движение ее назад в исходное положение для следующей отцепки. Процесс работы второй и последующих кареток аналогичен.
Бортовой компьютер получает сигнал от измерителя скорости, установленного за горбом горки, и от измерителя скорости, установленного на пути надвига, сравнивает скорости отцепа и надвига, выдает сигнал о состоявшемся или несостоявшемся расцеплении. В последнем случае подает сигнал машинисту горочного локомотива.
В конструкции системы автоматической расцепки грузовых вагонов могут быть применены выпускаемые промышленностью России счетчики осей вагонов и измерители скорости подвижного состава, универсальные наружные телевизионные камеры и электрические и гидравлические устройства.
Примеры конкретного выполнения.
Пример 1.
ДА - расстояние, которое пройдет ось автосцепки расцепа Nk+1 с момента начала расцепки Nk до окончания торможения каретки;
Н - эффективное количество кареток на одном пути надвига определяется исходя из условия Н≥ТВ/ТП;
ТВ - продолжительность цикла расцепки от начала расцепки Nk до возврата каретки после окончания расцепки Nk на исходную позицию начала следующей расцепки. На исходной позиции начала следующей расцепки скорость каретки должна быть равна скорости надвига=ТРАС+ТТОРМ+ТРАЗГОН.НАЗАД+ТДВИЖ.НАЗАД+ТТОРМ+ТРАЗГОН.ВПЕРЕД;
Скорость возвращения каретки назад 2 м/с;
ТРАЗГОН.НАЗАД=ТТОРМ=ТРАЗГОН.ВПЕРЕД=0,613 с;
ТП - время от начала расцепки Nk до подхода следующей отцепляемой группы вагонов Nk+1 на исходную позицию начала расцепки Nk+1=LK/VH=14/2=7 с;
NК-=1;
NК+1-=1;
VH - скорость надвига=2 м/с=7,2 км/ч;
VК - max скорость движения каретки манипулятора=5 м/с=18 км/ч;
TP=2 с - время расцепки;
W - мах ускорение каретки манипулятора=0,3 g=3,26 м/с2;
LК - расстояние между осями автосцепки одного расцепа=14 м;
АВ - расстояние от места начала расцепки Nk до места окончания расцепки Nk=VH·TP=2·2=4 м;
ТТОРМ - время торможения каретки после окончания расцепки = VH/W=2/3,26=0,613 с;
ВС - расстояние от места окончания расцепки Nk до места окончания торможения каретки = VH·ТТОРМ-W·ТТОРМ 2/2=2·0,613-3,26·0,6132/2=0,614 м;
АС=АВ+ВС=4+0,614=4,614 м;
SPП - путь каретки при разгоне вперед;
SРЗ - путь каретки при разгоне назад;
SРП=SPЗ;
Sт - путь каретки при торможении;
Sт=0,614 м;
SРАВН.НАЗАД - путь каретки при равномерном движении назад;
SРАВН.НАЗАД=4,614-0,614=4 м;
ТДВИЖ.НАЗАД - время движения каретки при равномерном движении назад=4 м/2 м/с=2 с;
ТВ=2+0,613+0,613+0,613+2=5,839;
ТП=LК/VH;
ТП=14/2=7 с;
H=5,839/7=0,834.
Т.е. для эффективной и надежной работы в данном случае достаточно одной каретки при мощности привода каретки 1,6 кВт.
Пример 2.
Н - эффективное количество кареток на одном пути надвига определяется исходя из условия Н≥ТВ/ТП.
ТВ - продолжительность цикла расцепки от начала расцепки Nk до возврата каретки после окончания расцепки Nk на исходную позицию начала следующей расцепки. На исходной позиции начала следующей расцепки скорость каретки должна быть равна скорости надвига=ТРАС+ТТОРМ=ТРАЗГОН.НАЗАД+ТДВИЖ.НАЗАД+ТРАЗГОН.ВПЕРЕД;
скорость возвращения каретки назад 2 м/с;
ТРАЗГОН.НАЗАД=ТТОРМ=ТРАЗГОН.ВПЕРЕД=1,02 с;
ТП - время от начала расцепки Nk до подхода следующей отцепляемой группы вагонов Nk+1 на исходную позицию начала расцепки Nk+1=LК/VH=14/2=7 с;
NК-=1;
NК+1-=1;
VH - скорость надвига =2 м/с=7,2 км/ч;
VК - max скорость движения каретки манипулятора=5 м/с=18 км/ч;
TP=4 с - время расцепки;
W - мах ускорение каретки манипулятора=0,2 g=1,96 м/с2;
LК - расстояние между осями автосцепки одного расцепа=14 м;
АВ - расстояние от места начала расцепки Nk до места окончания расцепки Nk=VH·TP=2·4=8 м;
ТТОРМ - время торможения каретки после окончания расцепки = VH/W=2/1,96=1,02 с;
ВС - расстояние от места окончания расцепки Nk до места окончания торможения каретки = VH·ТТОРМ-W·ТТОРМ 2/2=2·1,03-1,96·1,032/2=1,08 м;
АС=АВ+ВС=8+1,08=9,08 м;
SРП - путь каретки при разгоне вперед;
SPЗ - путь каретки при разгоне назад;
SРП=SPЗ;
Sт - путь каретки при торможении;
Sт=0,614 м;
SРАВН.НАЗАД - путь каретки при равномерном движении назад;
SРАВН.НАЗАД=4,614-0,614=4 м;
ТДВИЖ.НАЗАД - время движения каретки при равномерном движении назад=4 м/2 м/с=2 с;
ТВ=4+1,02+1,02+1,02+2=9,06;
ТП=LК/VH;
ТП=14/2=7 с;
H=9,06/7-1,3.
Т.е. для эффективной и надежной работы в данном случае необходимо две каретки при мощности привода каретки 1,6 кВт.
При использовании известных решений время на расформирование одного состава составляет 17 мин, а при использовании заявляемой системы оно сократится в среднем на 4 мин и составит 13 мин.
Использование заявляемой системы для расцепления вагонов на 50 горках позволит высвободить 100 человек составителей поездов, улучшить условия труда у оставшихся работников и увеличить скорость надвига вагонов на горку до 10 км/ч, что, в конечном итоге, позволит без увеличения числа горок обеспечить обслуживание поездов при существенном росте вагонопотока.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РАСЦЕПЛЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2020 |
|
RU2732676C1 |
| УСТРОЙСТВО АВТОРАСЦЕПКИ ГРУЗОВЫХ ВАГОНОВ | 2008 |
|
RU2379206C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РАСЦЕПЛЕНИЯ АВТОСЦЕПОК ДВИЖУЩИХСЯ ВАГОНОВ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2728968C1 |
| Способ перемещения мобильной платформы робототехнического комплекса, предназначенного для роспуска железнодорожного подвижного состава на сортировочной горке | 2024 |
|
RU2834370C1 |
| Устройство для расцепления вагонов состава | 1991 |
|
SU1799768A1 |
| Способ и система управления подвижным составом при осуществлении надвига и роспуска с сортировочной горки | 2019 |
|
RU2705035C1 |
| ГОРОЧНОЕ ПРОГРАММНО-ЗАДАЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2157773C2 |
| Устройство для автоматического расцепления вагонов на сортировочной горке | 1973 |
|
SU901124A1 |
| Устройство для расцепления автосцепок железнодорожных вагонов | 1978 |
|
SU688363A1 |
| Устройство для расцепления вагонов | 1980 |
|
SU977254A1 |


Изобретение относится к устройствам автоматического расцепления вагонов, например грузовых вагонов железнодорожного состава при надвиге на сортировочную горку в процессе расформирования состава. Система содержит выполненную с возможностью перемещения относительно подлежащих расцеплению грузовых вагонов каретку. На каретку установлены манипулятор и оптико-электронная система, сигналы которой используются для определения скорости и координат расцепного узла. Количество кареток H для одного пути надвига определяется из соотношения H≥ТВ/ТП, где ТВ - продолжительность цикла расцепки от начала расцепки Nk до возврата каретки после окончания расцепки Nk на исходную позицию начала следующей расцепки, ТП - время от начала расцепки Nk до подхода следующей отцепляемой группы вагонов Nk+1 на исходную позицию начала расцепки Nk+1. Манипулятор и видеосистема размещены на каждой каретке. Достигается повышение надежности, эффективности и производительности работы сортировочной горки. 5 з.п. ф-лы, 4 ил.
1. Система авторасцепки вагонов на сортировочной горке, содержащая выполненную с возможностью перемещения относительно подлежащих расцеплению грузовых вагонов, по меньшей мере, одну каретку, на которой установлены манипулятор и оптико-электронная система, сигналы которой используются для определения скорости и координат расцепного узла, причем количество кареток H для одного пути надвига определяется из соотношения H≥ТВ/ТП, где ТВ - продолжительность цикла расцепки от начала расцепки Nk до возврата каретки после окончания расцепки Nk на исходную позицию начала следующей расцепки, ТП - время от начала расцепки Nk до подхода следующей отцепляемой группы вагонов Nk+1 на исходную позицию начала расцепки Nk+1, а манипулятор и видеосистема размещены на каждой каретке.
2. Система по п.1, отличающаяся тем, что снабжена эстакадой или монорельсом, установленными на опорах вдоль рельсового пути.
3. Система по п.2, отличающаяся тем, что эстакада выполнена в виде участка узкоколейного пути.
4. Система по п.1, отличающаяся тем, что оптико-электронная система содержит установленные на каретке цифровую телекамеру, бортовой компьютер и блок обработки изображения.
5. Система по п.1, отличающаяся тем, что содержит измеритель скорости и счетчик осей, установленные на пути надвига и связанные каналами связи с бортовым компьютером.
6. Система по п.1, отличающаяся тем, что содержит измеритель скорости, установленный за горбом горки и связанный каналом связи с бортовым компьютером.
| УСТРОЙСТВО АВТОРАСЦЕПКИ ГРУЗОВЫХ ВАГОНОВ | 2008 |
|
RU2379206C1 |
| Устройство для автоматического расцепления вагонов | 1989 |
|
SU1722923A1 |
| САМОХОДНАЯ КАРЕТКА ДЛЯ МЕХАНИЗАЦИИ РАСЦЕПКИ ВАГОНОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 0 |
|
SU288007A1 |
| Устройство для автоматического расцепления движущихся вагонов | 1986 |
|
SU1390105A1 |
| Устройство автоматического расцепления автосцепок движущихся вагонов | 1983 |
|
SU1232546A1 |
| Устройство для расцепления вагонов | 1988 |
|
SU1576390A1 |
| Устройство для расцепления вагонов | 1988 |
|
SU1595725A1 |
| Устройство для расцепления железнодорожных вагонов | 1989 |
|
SU1736797A1 |
| US 3942648 A, 09.03.1979. | |||

