Заявляемое изобретение относится к области радиотехники и может быть использовано для навигации подводных морских аппаратов без всплытия.
Известен способ радионавигационного определения координат подводных морских аппаратов (ПА) с использованием системы береговых базовых радионавигационных станций (РНС), включающий в себя одну ведущую и по крайней мере две ведомых РНС, излучающих радиосигналы, на ПА принимают радиосигналы базовых РНС, при помощи антенны, буксируемой у поверхности воды, либо на радиобуй или бортовую антенну при всплытии ПА [1]. Такой способ используют известные морские РНС «Омега», «Чайка» и «Loran», работающие на частотах 10-100 кГц. Однако при работе ПА на больших глубинах, порядка 100 м и более, определение их координат затрудняется из-за высокого уровня поглощения морской водой радиосигналов этого диапазона частот и сложности скрытной буксировки приемной антенны. (Соловьев В.И., Новик Л.И., Морозов И.Д. Связь на море. Изд. Судостроение. Ленинград. 1978).
Наиболее близким техническим решением к заявленному является способ подводного приема радиосигналов на подводном аппарате, основанный на эффекте параметрической демодуляции электромагнитных волн акустическим излучением [патент RU 2453037, опубликован 09.02.2011], по которому для приема сообщения с подводного объекта акустическую волну направляют в заданную на водной поверхности область прихода электромагнитной волны, несущей сообщение, отличающийся тем, что излучение акустических волн осуществляют через равномерно расположенные вдоль корпуса подводного объекта основные акустические излучатели, фазируют акустические волны по каждому излучателю через управляемые эхолотами линии задержки, поочередно формируя на водной поверхности когерентную линейную область (виртуальную электрическую антенну), в зоне которой осуществляют параметрическую демодуляцию распространяющейся вдоль водной поверхности электромагнитной волны с выделением частоты модуляции Fм при условии ƒэ=ƒа, где ƒэ - частота электромагнитной волны, несущей сообщение на частоте модуляции Fм; ƒa - частота акустической волны. Недостатком этого способа является необходимость приема сигналов сразу с нескольких базовых РНС и разделения их во времени и пространстве, что затрудняет их прием.
Целью заявляемого изобретения является определение координат подводного аппарата без всплытия.
Поставленная цель достигается следующим образом: в способе радионавигационного определения координат подводных морских аппаратов, по которому для приема сообщения на подводном аппарате акустическую волну направляют на поверхность моря в зоне работы РНС, согласно изобретению, смодулированный акустический сигнал излучают на рабочей частоте РНС, а приемной антенной ПА принимают демодулированный широкополосный сигнал (ШПС), несущий код какой либо из РНС, далее в приемнике производят свертку принятых сигналов с опорными сигналами известных ШПС-кодов РНС, измеряют разность по времени прихода сверток сигналов РНС, по которой определяют линии и точку положения ПА с коррекцией глубины его положения, получаемой стандартными эхолотами.
На Фиг. 1 показан навигационный план линий положения, создаваемых сигналами базовых станций РНС где изображены: А - ведущая наземная РНС; В, С - ведомые наземные РНС; 1 - подводный аппарат, принимающий сигнал; 2 - линии положения; r1, r2, r3 - расстояния между базовыми РНС и подводным аппаратом, rAC, rAB - расстояния между ведущей и ведомыми базовыми РНС.
На Фиг. 2 изображена схема приема сигналов, реализующая заявленный способ где: 1 - подводный аппарат; 3 - поверхность моря; 4 - вектор напряженности электрического поля электромагнитной (ЭМ) волны базовых РНС; 5 - диаграмма направленности акустического излучения; 6 - акустический излучатель; 7 - ЭМ антенна для приема ШПС; 8 - излучение ЭМ сигнала ведущей РНС А; 9 - направление излучения ЭМ ШПС наземной РНС В; 10 - направление излучения ЭМ ШПС наземной РНС С; 11 - направление демодулированного ШПС с частотой Fм; Ez и Ех - компоненты электрического поля ЭМ волн БРС по осям z и x; ƒэ, ƒа - несущие частоты ЭМ и АК волн; h - глубина положения ПА.
На Фиг. 3 приведены эпюры огибающих сигналов РНС А, В, С где: 12, 13, 14 - акустические сигналы «подсветки» излучаемые с борта ПА; Ri(τ) - взаимно-корреляционная функция ШПС (ВКФ); tAB, tAC - разность времени прихода ЭМ сигналов в точку расположения ПА под поверхностью моря.
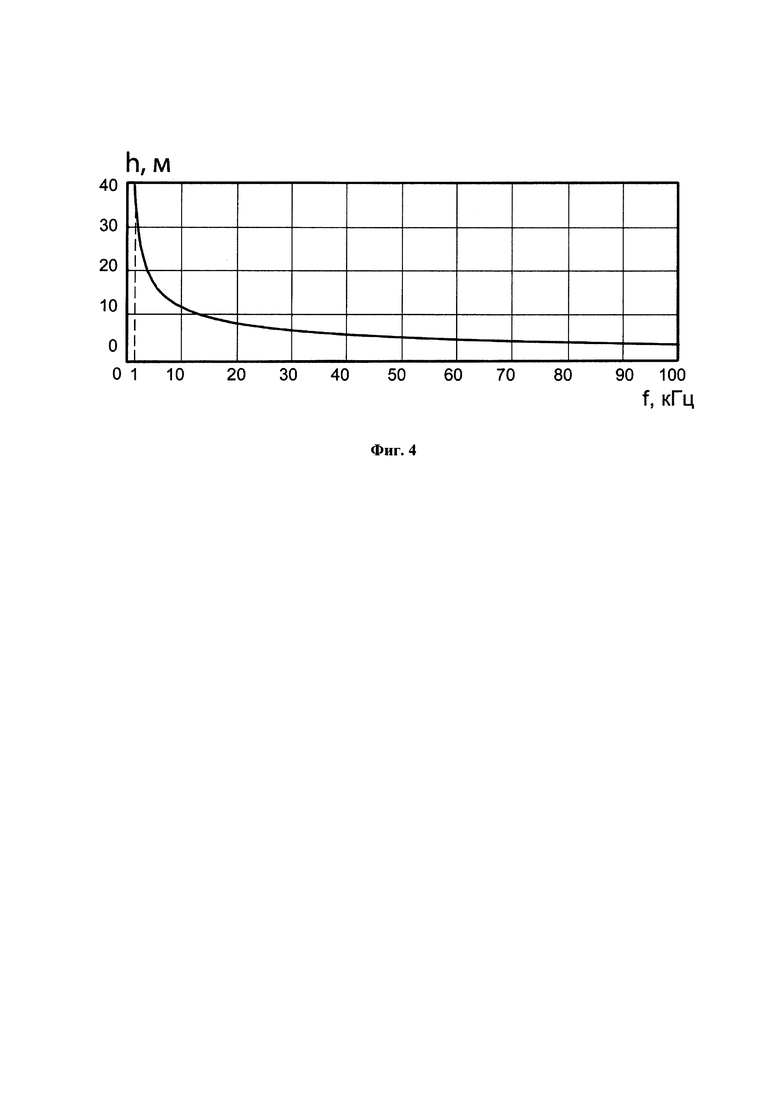
На Фиг. 4 приведена зависимость глубины приема h, от верхней частоты сигнала свертки для затухания - 40 дБ при электропроводности морской воды 4 См/м. Этот график демонстрирует глубину приема на несущих частотах РНС более 10 кГц.
Способ включает в себя подводный аппарат 1, расположенный под поверхностью моря 3 на глубине h, на котором расположены акустический излучатель 6, антенна 7 для приема ШПС, ведущую А и ведомые береговые радионавигационные станции В, С, расположенные на расстояниях r1, r2, r3 от подводного аппарата и расстояниях rAC, rAB от ведущей станции.
Представленный на фигурах способ радионавигационного определения координат подводных морских аппаратов работает следующим образом.
Ведущая и ведомые базовые радионавигационные станции излучают электромагнитные широкополосные сигналы, фронт излучения которых образует линии положения 2, по разности прихода ШПС ведущей и ведомых базовых станций определяется точка положения подводного аппарата 1, на котором расположен акустический излучатель 6, облучающий поверхность моря 3, на некоторой площади, соответствующей сечению диаграммы направленности акустического излучения 5, на частоте ƒa=ƒэ. В скин-слое электромагнитной волны Еx, с рабочей частотой ƒэ, за счет управления проводимостью морской воды под воздействием акустического излучения 5, происходит параметрическое перемножение радиосигналов РНС и акустических сигналов, излучаемых с ПА на частоте ƒa. Таким образом в скин-слое ЭМ волны появляются комбинационные сигналы верхних и нижних частот модуляции ƒэ±Fм±ƒа, где Fм - частота модулирующего ШПС с кодом адреса какой-либо из РНС. Если ƒэ=ƒa, за счет высокоточной синхронизации, обеспечивающей равенство несущих частот, то в скин-слое ЭМ волны выделяется последовательность сигналов ШПС-кода в диапазоне низких частот Fм с затуханием в морской воде существенно меньшим, чем затухание несущей частоты ƒэ. Таким образом на приемную ЭМ антенну 7, расположенную на борту ПА 1, принимаются непосредственно ШПС 11. Если работать на достаточно высоких частотах, в диапазоне 1-3 мГц, то возможен перенос ШПС на некоторую промежуточную частоту с последующей демодуляцией в приемнике ПА. Если ЭМ сигналы РНС излучаются на частоте ωэ=2π⋅ƒэ модулированной ШПС-кодом с периодом Tk:

а сигналы акустической «подсветки» приходят в скин-слой ЭМ-волны на той же частоте ωа=ωэ:

то за счет модуляции электропроводности воды акустическим излучением:

в скин-слое ЭМ-волны возникает ток проводимости:

В результате этого перемножения появляется сигнал комбинационных частот ƒэ±ƒa, при этом, если ƒэ=ƒa, то сигнал двойной частоты поглощается морской водой по мере увеличения глубины, и остаются лишь частоты модуляции Fм с ШПС-кодом 11

поступающим на приемную низкочастотную антенну 7, расположенную на борту ПА. В приемнике ПА код ШПС декодируется, в результате чего получается его свертка Ri(τ) (фиг. 3) с амплитудой, превышающей уровень приходящего сигнала на величину базы ШПС-кода.
При Тk=1 мс, верхняя частота спектра демодулированного сигнала будет равна  . Сигнал свертки Eh в этой полосе частот принимается ЭМ антенной 7 со всей площади, облучаемой АК излучателем:
. Сигнал свертки Eh в этой полосе частот принимается ЭМ антенной 7 со всей площади, облучаемой АК излучателем:

В результате происходит компенсация потерь за счет параметрического эффекта. По данным лабораторных исследований [2], коэффициент параметрической демодуляции при плотности потока мощности АК излучения 1 Вт/м2 составляет величину 10-3 и резко увеличивается по мере нарастания мощности АК излучения.
Для приема сигнала, при изотропной мощности АК излучателя РA=1000 Вт, глубине ПА h=100 м, площади акустической антенны SA=1 м2 и длине акустической волны λ=0,1 м (рабочая частота 15 кГц), плотность потока мощности у поверхности воды составит:

В отличие от точечного приема, например, на магнитную антенну, поверхностная параметрическая антенна во много раз более эффективна. Увеличение амплитуды сигнала свертки возможно также как за счет расширения базы ШПС, так и за счет времени приема. При скорости подводного хода ПА 10 узлов (0,5 м/с) и среднеквадратичной ошибке оценки координат для длинноволновых РНС 300 м, возможное время накапливания сигнала составит 600 с. Таким образом, энергетический потенциал приема сигналов РНС является управляемым параметром, способным, не смотря на потери при параметрическом преобразовании, реализовать предлагаемый способ подводной навигации.
В микроконтроллере приемника регистрируется разность времени прихода свертки Ri(τ) между сигналами ведущей РНС А 12 и ведомыми станциями В 13 и С 14 с коррекцией на глубину положения ПА h, определяемую бортовым эхолокатором.
Каждой из разности расстояний rAB=с⋅tAB±k2h, rAC=c⋅tAC±k1h, соответствует своя линия положений 2. Пересечение этих линий дает точку положения ПА, где с - скорость распространения радиоволн; k1 и k2 - коэффициенты коррекции на глубину положения ПА;
Промышленная применимость
Преимуществом нового способа является Определение координат ПА без всплытия, что существенно улучшает тактико-технические возможности подводных судов. Особое преимущество новый способ имеет при продвижении подо льдами Арктики.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОДВОДНОЙ СЕЙСМОРАЗВЕДКИ НА МОРЕ | 2020 |
|
RU2755001C1 |
| СПОСОБ ПОДВОДНОГО ПРИЕМА РАДИОСИГНАЛОВ | 2011 |
|
RU2453037C1 |
| СПОСОБ ДВУСТОРОННЕЙ СВЯЗИ С ПОДВОДНЫМ ОБЪЕКТОМ | 1998 |
|
RU2134023C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОНИТОРИНГА СВАЙНЫХ ФУНДАМЕНТОВ СТРОИТЕЛЬНЫХ СООРУЖЕНИЙ В РАЙОНАХ ВЕЧНОЙ МЕРЗЛОТЫ | 2019 |
|
RU2733098C1 |
| Способ радиолокации | 2022 |
|
RU2797828C1 |
| Система защиты кораблей от подводных дронов | 2024 |
|
RU2832756C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| СПОСОБ ОБНАРУЖЕНИЯ, РАСПОЗНАВАНИЯ И ВЫТЕСНЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ ОТ МОРСКОЙ НЕФТЕГАЗОВОЙ ПЛАТФОРМЫ | 2010 |
|
RU2434245C2 |
| СПОСОБ ОБНАРУЖЕНИЯ МОРСКИХ ОБЪЕКТОВ ПРИ ВСПЛЫТИИ ПОДВОДНОГО АППАРАТА | 2002 |
|
RU2215304C2 |
| Устройство передачи информации с подводной лодки бесконтактным методом | 2016 |
|
RU2640577C2 |
Заявляемое изобретение относится к области радиотехники и может быть использовано для навигации подводных морских аппаратов (ПА) без всплытия. Целью заявляемого способа является облегчение определения положения подводного аппарата при помощи измерения разности прихода сверток сигналов базовых радионавигационных станций (РНС) и определения глубины его положения. В способе радионавигационного определения координат ПА осуществляют прием сигналов базовых (РНС) на подводном аппарате, направляя акустическую волну на поверхность моря в зоне работы РНС. Смодулированный акустический сигнал излучают на рабочей частоте РНС, а приемной антенной ПА принимают демодулированный широкополосный сигнал (ШПС), несущий код какой-либо из РНС, с выхода которой сигналы поступают на приемник, где производится их свертка с опорными сигналами известных ШПС кодов базовых РНС. Далее измеряют разности по времени прихода сверток сигналов РНС, по которым определяют линии и точку положения ПА с коррекцией глубины его положения, получаемой стандартными эхолотами. 4 ил.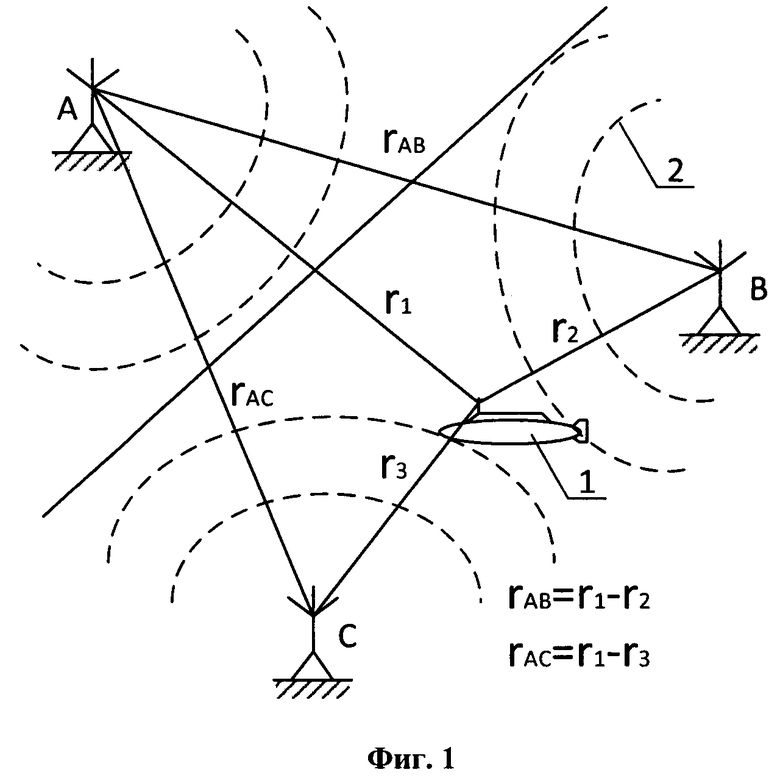
Способ радионавигационного определения координат подводных морских аппаратов (ПА), заключающийся в приеме сигналов базовых радионавигационных станций (РНС) на подводном аппарате, направляя акустическую волну на поверхность моря в зоне работы РНС, отличающийся тем, что смодулированный акустический сигнал излучают на рабочей частоте РНС, а приемной антенной ПА принимают демодулированный широкополосный сигнал (ШПС), несущий код какой-либо из РНС, с выхода которой сигналы поступают на приемник, где производится их свертка с опорными сигналами известных ШПС кодов базовых РНС, измеряют разности по времени прихода сверток сигналов РНС, по которым определяют линии и точку положения ПА с коррекцией глубины его положения, получаемой стандартными эхолотами.
| СПОСОБ ПОДВОДНОГО ПРИЕМА РАДИОСИГНАЛОВ | 2011 |
|
RU2453037C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНЫХ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599902C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2010 |
|
RU2437114C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2444759C1 |
| СПОСОБ И СИСТЕМА НАВИГАЦИИ ПОДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2659299C1 |
| US 5331602 A, 19.07.1994 | |||
| JP 2008128968 A, 05.06.2008 | |||
| СИНТАКСИЧЕСКАЯ СТРУКТУРА ПАРАМЕТРОВ ГИПОТЕТИЧЕСКОГО ЭТАЛОННОГО ДЕКОДЕРА | 2013 |
|
RU2643463C2 |

