ОБЛАСТЬ ТЕХНИКИ
[0001] Варианты выполнения предложенного изобретения относятся к двигательной установке на внутренних постоянных магнитах, и, более конкретно, к двигательной установке, содержащей двигатель на внутренних постоянных магнитах (ВПМ), и к блоку управления, выполненному с возможностью определения углового положения ротора ВПМ двигателя.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[0002] Электрические машины, такие как синхронные двигатели на постоянных магнитах, используются в разнообразных прикладных системах, включая, но без ограничения указанным, электронасосы, электрические или гибридные транспортные средства, а также бытовые и промышленные прикладные системы, которые содержат вращающиеся компоненты, тяговые двигатели и подобные им. К типам синхронных двигателей на постоянных магнитах могут относиться двигатели на поверхностных постоянных магнитах (ППМ) и двигатели на внутренних постоянных магнитах (ВПМ). Синхронные двигатели на постоянных магнитах, в обычном случае, содержат статор со статорной обмоткой, имеющей одну или более фаз, и ротор, содержащий постоянные магниты. Ротор может быть расположен внутри статора. В обычном случае для работы синхронных двигателей на постоянных магнитах необходимо обеспечивать заданную последовательность фаз статорной обмотки. Следовательно, необходимо определять угловое положение ротора (далее в настоящем документе «положение ротора») для определения напряжения и/или тока, которые следует подводить к статорной обмотке.
[0003] Некоторые из имеющихся в настоящее время установок с синхронными двигателями на постоянных магнитах используют один или более датчиков положения и/или энкодеров для определения положения ротора. Иногда работа датчиков положения и/или энкодеров является ненадежной в определенных жестких условиях, включая, но без ограничения указанным, повышенные температуры (например, температуры в несколько сотен градусов по шкале Цельсия). Кроме того, датчики положения и/или энкодеры занимают дополнительное пространство. Следовательно, получающиеся в результате двигательные установки, использующие такие датчики положения и/или энкодеры, не являются компактными. Помимо этого, использование датчиков положения и/или энкодеров в результате приводит к удорожанию устройств двигателя.
[0004] Кроме того, некоторые установки для оценки положения ротора используют третью гармонику обратной электродвижущей силы (ЭДС), создаваемой двигателем. Однако в случае использования двигателей, таких как ВПМ двигатели, имеющих ротор с явно выраженной полюсностью, обратная ЭДС может изменяться с изменением нагрузки. В частности, на третью гармонику обратной ЭДС влияют изменения нагрузки. Главным образом, вследствие изменений нагрузки изменяется фазовый угол третьей гармоники, который указывает на положение ротора. Следовательно, использование информации, соответствующей третьей гармонике, является ненадежным для определения положения ротора ВПМ двигателей.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] В соответствии с аспектами изобретения предложен блок управления для двигателя на внутренних постоянных магнитах (ВПМ). Блок управления содержит сенсорную электронику, предназначенную для считывания фазного напряжения, соответствующего одной или более фазным клеммам ВПМ двигателя, с целью создания соответствующего сигнала фазного напряжения. Блок управления также содержит контроллер, электрически соединенный с сенсорной электроникой и выполненный с возможностью выделения одной или более гармоник, кратных трем, порядка девятой гармоники и больше, чем девятая гармоника основной частоты сигнала фазного напряжения, соответствующего одной или более фазным клеммам. Контроллер также выполнен с возможностью определения углового положения ротора ВПМ двигателя на основании выделенной одной или более гармоник, кратных трем.
[0006] В соответствии с еще одним аспектом изобретения предложена двигательная установка. Двигательная установка содержит ВПМ двигатель, содержащий одну или более фазных клемм, ротор и статор. Двигательная установка содержит блок управления, электрически соединенный с ВПМ двигателем на одной или более фазных клеммах. Блок управления содержит сенсорную электронику, выполненную с возможностью считывания фазного напряжения, соответствующего одной или более фазным клеммам ВПМ двигателя, для генерирования соответствующего сигнала фазного напряжения. Блок управления дополнительно содержит контроллер, электрически соединенный с сенсорной электроникой и выполненный с возможностью выделения одной или более гармоник, кратных трем, порядка девятой гармоники и больше, чем девятая гармоника основной частоты сигнала фазного напряжения, соответствующего одной или более фазным клеммам. Контроллер также выполнен с возможностью определения углового положения ротора ВПМ двигателя на основании выделенной одной или более гармоник, кратных трем.
[0007] В соответствии с еще одним аспектом настоящего изобретения предложен способ управления ВПМ двигателем. Способ включает прием сигналов фазного напряжения, соответствующих одной или более фазным клеммам ВПМ двигателя. Способ также включает выделение одной или более гармоник, кратных трем, порядка девятой гармоники и больше, чем девятая гармоника основной частоты сигнала фазного напряжения, соответствующей одной или более фазным клеммам. Кроме того, способ включает определение углового положения ротора ВПМ двигателя на основании выделенной одной или более гармоник, кратных трем. Помимо этого, способ включает подачу по меньшей мере одного из фазного тока и фазного напряжения к одной или более фазным клеммам, на основании по меньшей мере углового положения ротора.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Эти и другие свойства, аспекты и преимущества предложенного изобретения будут более понятны при прочтении нижеследующего подробного описания со ссылкой на сопроводительные чертежи, на которых одинаковыми ссылочными позициями обозначены одинаковые детали, при этом:
[0009] на фиг. 1 представлен схематический вид в поперечном сечении типичного двигателя (ВПМ) на постоянных магнитах,
[0010] на фиг. 2 представлена принципиальная схема двигательной установки в соответствии с аспектами предложенного изобретения,
[0011] на фиг. 3 представлена блок схема примера способа управления ВПМ двигателем в соответствии с аспектами предложенного изобретения, и
[0012] на фиг. 4 представлена блок схема примера способа выделения одной или более гармоник, кратных трем, порядка девятой гармоники и больше, чем девятая гармоника, в соответствии с аспектами изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0013] Предложенное изобретение станет более понятным со ссылкой на подробные чертежи и изложенное в настоящем документе описание. Различные варианты выполнения описаны в настоящем документе со ссылкой на чертежи. Однако специалисту в данной области техники будет понятно, что изложенное здесь подробное описание в отношении этих чертежей приведено для пояснения, так как способ и устройство могут выходить за рамки описанных вариантов выполнения.
[0014] В нижеследующем описании изобретения элементы в единственном числе включают также указанные элементы во множественном числе, если только контекст явно не требует иного. В настоящем документе термин «или» не является исключающим, а относится по меньшей мере к одному из представленных обозначенных компонентов и включает случаи, в которых могут иметься сочетания обозначенных компонентов, если только в контексте явно не указано иное.
[0015] В настоящем документе термины «может» и «может быть» указывают на возможность возникновения события в ряду событий, на наличие определенного свойства, характеристики или функции, и/или уточняют другой глагол посредством представления одной или более возможности, способности или вероятности, связанных с уточняемым глаголом. Соответственно, использование терминов «может» и «может быть» указывает на то, что варьируемый термин является очевидно подходящим, способным или пригодным для обозначения способности или пригодности указанной способности, функции или применимости с одновременным учетом того, что в некоторых обстоятельствах варьируемый термин иногда может быть неподходящим, неспособным или непригодным.
[0016] В соответствии с некоторыми аспектами предложенного изобретения представлена двигательная установка. Двигательная установка содержит двигатель на внутренних постоянных магнитах, содержащий одну или более фазных клемм, ротор и статор. Двигательная установка дополнительно содержит блок управления, электрически соединенный с двигателем на внутренних постоянных магнитах на одной или более фазных клеммах. Блок управления содержит сенсорную электронику, выполненную с возможностью считывания фазного напряжения, соответствующего одной или более фазным клеммам двигателя на внутренних постоянных магнитах, для генерирования соответствующего сигнала фазного напряжения. Блок управления дополнительно содержит контроллер, электрически соединенный с сенсорной электроникой и выполненный с возможностью выделения одной или более гармоник, кратных трем, порядка девятой гармоники и больше, чем девятая гармоника основной частоты сигнала фазного напряжения, соответствующей одной или более фазным клеммам. Используемый в настоящем документе термин «гармоника, кратная трем» относится к гармонике основной частоты, кратной трем. Например, если основная частота фазного напряжения обозначена F, тогда гармоники, кратные трем могут содержать все гармоники 3*n*F, где n - целое число. Контроллер также выполнен с возможностью определения углового положения ротора двигателя на внутренних постоянных магнитах на основании выделенной одной или более гармоник, кратных трем.
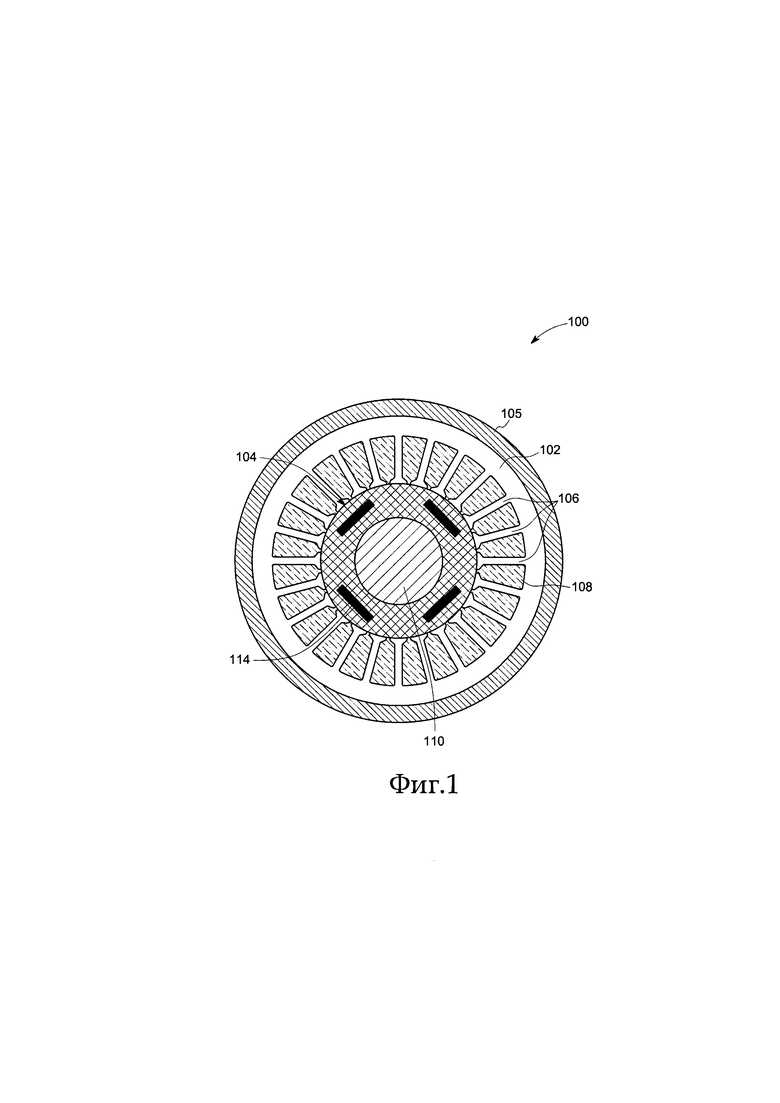
[0017] На фиг. 1 представлен схематический вид в поперечном сечении типичного двигателя 100 на внутренних постоянных магнитах (ВПМ). Двигатель 100 может содержать статор 102 и ротор 104, расположенные в корпусе 105. Статор 102 может содержать несколько статорных полюсов 106 и статорную обмотку 108, окружающую статорные полюсы 106. Статорная обмотка 108 может быть многофазной (например, трехфазной) обмоткой.
[0018] Кроме того, как изображено на фиг. 1, ротор 104 расположен внутри статора 102. Ротор 104 может включать вал 110, сердечник 112 и постоянные магниты 114 (называемые в настоящем документе «полюсами 114 ротора»). Сердечник 112 ротора может быть установлен на валу 110 ротора. Сердечник 112 ротора может быть выполнен из монолитного материала или тонких листов. Помимо этого, полюсы 114 ротора расположены внутри сердечника 112 ротора. Более конкретно, полюсы 114 ротора расположены в пазах (на фиг. 1 не обозначенных), выполненных в сердечнике 112 ротора.
[0019] В процессе работы, когда ВПМ двигатель 100 получает питание с помощью подачи электричества к статорной обмотке 108, ток, протекающий через статорную обмотку 108, создает электромагнитное поле вокруг ротора 104. Электромагнитное поле взаимодействует с магнитным полем ротора 104, создавая в результате вращающий момент, прикладываемый к ротору 104. Такой вращающий момент, создаваемый благодаря потокосцеплению между электромагнитным полем (создаваемым статорной обмоткой 108) и магнитным полем (создаваемым полюсами 114 ротора), в настоящем документе называется «первичным вращающим моментом». В типичном случае, в таком ВПМ двигателе 100 всегда существует реактивный момент, называемый в настоящем документе «вторичным вращающим моментом». Вторичный вращающий момент может быть создан магнитным потоком, наводимым в сердечнике 112 ротора вследствие наличия магнитного поля, создаваемого полюсами 114 ротора. Например, форма и расположение пазов в сердечнике 112 ротора выполнены для проведения магнитного потока так, что ротор 104 испытывает действие вторичного вращающего момента для совмещения силовых линий магнитного потока с силовыми линиями непрерывно изменяющегося электромагнитного потока, генерируемыми статорной обмоткой 108. Приложение такого вращающего момента (например, сочетание первичного вращающего момента и вторичного вращающего момента) сообщает вращательное движение ротору 104.
[0020] В типичном случае, для управления ВПМ двигателем 100 необходимо, чтобы на одну или более фаз статорной обмотки 108 подавались соответствующие фазные токи и напряжения для получения требуемого вращающего момента и скорости вращения (числа оборотов в минуту) ротора 104. Данные об угловом положении ротора 104 (в дальнейшем в настоящем документе «положение ротора») могут содействовать при подаче соответствующих фазных токов и напряжений с обеспечением, тем самым, эффективного управления ВПМ двигателем 100 с достижением требуемого вращающего момента и скорости вращения ротора 104. Таким образом, необходимо определять угловое положение ротора 104 для регулировки фазного тока и фазного напряжения, подводимых к одной или более фаз статорной обмотки 108. Для этого некоторые варианты выполнения предложенного изобретения относятся к блоку управления, выполненному с возможностью определения положения ротора, и к двигательной установке, использующей такой блок управления. В одном варианте выполнения блок управления может определять положение ротора в ВПМ двигателях без использования датчика положения. Кроме того, некоторые варианты выполнения предложенного изобретения относятся к способу управления ВПМ двигателем.
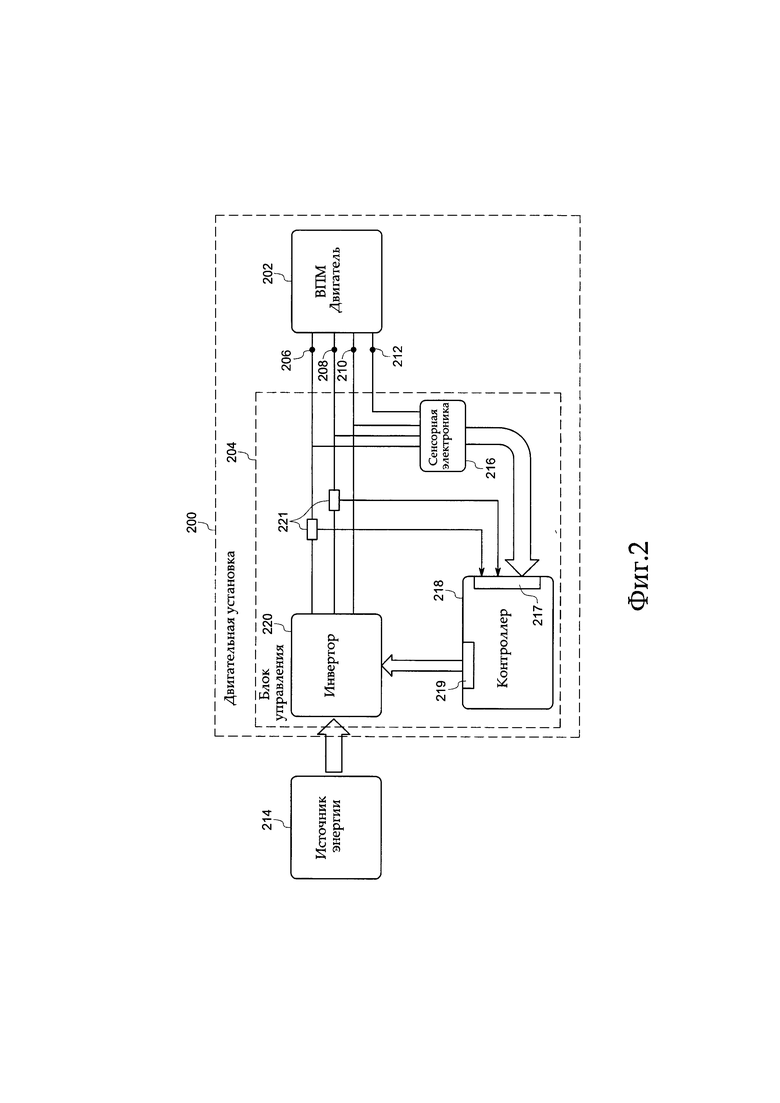
[0021] На фиг. 2 представлена принципиальная схема двигательной установки 200, выполненной в соответствии с аспектами предложенного изобретения. В некоторых вариантах выполнения двигательная установка 200 может содержать ВПМ двигатель 202, электрически соединенный с блоком 204 управления. В некоторых вариантах выполнения ВПМ двигатель 202 может быть подобен ВПМ двигателю 100, показанному на фиг. 1. ВПМ двигатель 202 может содержать три фазные клеммы 206, 208, 210 и нулевую клемму 212. Более конкретно, фазные клеммы 206-210 могут быть электрически соединены с соответствующими фазами статорной обмотки ВПМ двигателя 202 для подведения к ним фазных токов.
[0022] Блок управления 204 может запитываться прямым током (DC) от источника 214 питания. Кроме того, выход блока 204 управления может быть соединен с фазными клеммами 206-210 ВПМ двигателя 202 для подачи фазных токов к статорной обмотке ВПМ двигателя 202. Блок управления 204 может содержать сенсорную электронику 216, контроллер 218 и инвертер 220.
[0023] В некоторых вариантах выполнения сенсорная электроника 216 может быть электрически присоединена к контроллеру 218. Сенсорная электроника 216 может быть выполнена с обеспечением возможности считывания фазного напряжения, соответствующего фазным клеммам 206-210 ВПМ двигателя 202, для генерирования соответствующего сигнала фазного напряжения. В некоторых вариантах выполнения фазное напряжение (напряжения) может быть считано относительно уровня напряжения на нулевой клемме 212. В некоторых вариантах выполнения фазное напряжение (напряжения) может быть считано относительно уровня напряжения на возможном нулевом проводе (не показано на фиг. 2). В неограничивающем примере возможный нулевой провод может быть создан посредством совокупности трех резисторов, соединенных через три фазные клеммы 206-210 ВПМ двигателя 202. В таком случае, когда фазное напряжение (напряжения) считано относительно уровня напряжения на возможном нулевом проводе, в некоторых вариантах выполнения, только две фазы могут быть возбуждены в любое заданное время.
[0024] Сенсорная электроника 216 может включать один или более датчиков (не показано на фиг. 2), выполненных с возможностью считывания сигналы напряжения с фазных клемм 206-210. Дополнительно, в некоторых вариантах выполнения сенсорная электроника 216 может включать схему преобразования сигналов (не показано на фиг. 2), которая может усиливать считанные сигналы напряжения. В некоторых вариантах выполнения сигналы фазного напряжения могут характеризовать обратную электродвижущую силу (ЭДС), создаваемую ВПМ двигателем 202. В представленном предполагаемом примере сигналы фазного напряжения могут содержать 3 (три) сигнала фазного напряжения, каждый из которых характеризует обратную ЭДС на одной из трех фазных клемм 206-210. В неограничительном примере сигналы фазного напряжения могут быть по существу синусоидальными.
[0025] В некоторых вариантах выполнения блок 204 управления также может включать один или более датчиков 221 тока, расположенных в токовых цепях, проходящих от инвертера 220 к одной или более фазным клеммам 206-210. В неограничивающем примере датчик 221 тока может быть расположен между выходами инвертера 220 и тремя фазными клеммами 206-210, как изображено на фиг. 2.
[0026] В некоторых вариантах выполнения инвертер 220 может быть электрически соединен с контроллером 218 и фазными клеммами 206-210 ВПМ двигателя 202. Инвертер 220 может быть выполнен с возможностью управления подачей фазных токов к одной или более фазным клеммам 206-210 на основании управляющих команд, полученных от контроллера 218.
[0027] Контроллер 218 имеет порт 217 ввода и порт 219 вывода. Порт 217 ввода и порт 219 вывода могут включать несколько клемм, в настоящем документе называемых, соответственно, «входными клеммами» и «выходными клеммами». Контроллер 218 может быть электрически соединен с сенсорной электроникой 216 и с одним или более датчиками 221 тока с помощью порта 217 ввода. Помимо этого порт 219 вывода контроллера 218 может быть соединен с инвертером 220 (рассмотрен далее). В одном варианте выполнения контроллер 218 может включать специально запрограммированный универсальный компьютер, микропроцессор, процессор обработки цифровых сигналов, и/или микроконтроллер. Контроллер 218 может также содержать порты ввода/вывода, например порты 217 и 219, и носитель информации, такой как электронная память. К различным примерам микропроцессоров относятся, но без ограничения указанным, микропроцессор с архитектурой с сокращенным набором команд (RISK), или микропроцессор с архитектурой с полным набором команд (CISC). Кроме того, микропроцессор может быть одноядерным или многоядерным.
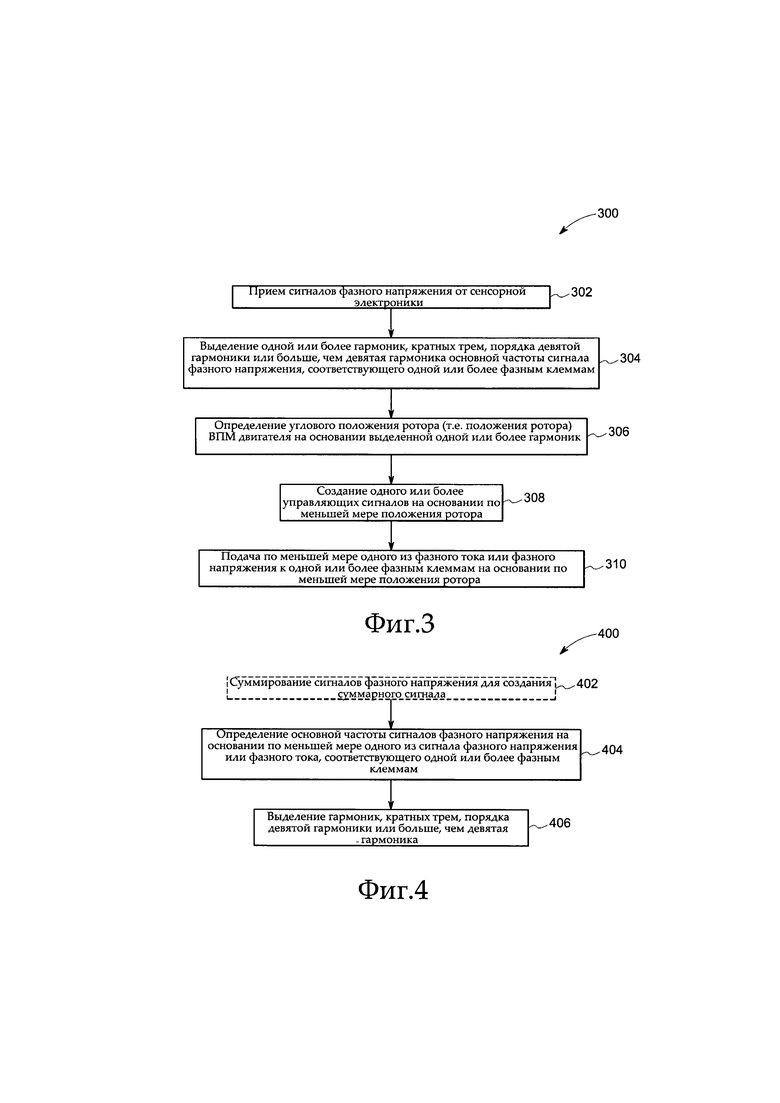
[0028] В некоторых вариантах выполнения контроллер 218 может быть выполнен с возможностью управления ВПМ двигателем 202 в процессе работы ВПМ двигателя 202. В некоторых вариантах выполнения ВПМ двигатель 202 может быть запущен в режиме работы без обратной связи. Например, как правило, при запуске в режиме работы без обратной связи контроллер 218 может быть выполнен с возможностью управления блоком 204 управления так, что к ВПМ двигателю 202 подводится фазное напряжение/ток (токи) с заданной частотой с заданным отношением напряжения к частоте. Соответственно, частота фазного тока (токов) может быть постепенно увеличена с обеспечением синхронного вращения ротора с электромагнитным полем, создаваемым статорной обмоткой 130, до тех пор, пока вращение ротора ВПМ двигателя 202 не достигнет заданной скорости, при которой магнитуда обратной ЭДС достигнет заданного уровня, так что из обратной ЭДС могут быть выделены гармоники, кратные трем. В некоторых вариантах выполнения для запуска ВПМ двигателя 202 контроллер 218 может быть выполнен с возможностью управления блоком 204 управления так, что фазное напряжение (напряжения) и/или фазный ток (токи) подводятся к ВПМ двигателю 202 на основании профиля индуктивности ВПМ двигателя 202. В некоторых вариантах выполнения профиль индуктивности ВПМ двигателя 202 может указывать на положение ротора. После запуска ВПМ двигателя 202, в одном варианте выполнения, контроллер 218 может быть выполнен с возможностью управления ВПМ двигателем 202 с помощью выполнения одного или более этапов, показанных на фиг. 3. На фиг. 3 представлена блок схема 300 примера способа управления ВПМ двигателем (например, ВПМ двигателем 202) в соответствии с аспектами предложенного изобретения. В одном варианте выполнения контроллер 218 может быть выполнен с возможностью выполнения этапов 302-310, показанных на фиг. 3, для управления работой ВПМ двигателя 202. Для упрощения описания и ясности фиг. 3 рассмотрена в сочетании с фиг. 2.
[0029] На этапе 302 контроллер 218 может быть выполнен с возможностью приема сигналов фазного напряжения от сенсорной электроники 216. Сигналы фазного напряжения, принятые контроллером 218 от сенсорной электроники 216, могут быть приняты в режиме реального времени или не в режиме реального времени. Кроме того, в одном варианте выполнения контроллер 218 может принимать сигналы фазного напряжения в непрерывном режиме. В другом варианте выполнения контроллер 218 может быть выполнен с возможностью дискретного приема сигналов фазного напряжения. Например, контроллер 218 может быть выполнен с возможностью приема сигналов фазного напряжения через регулярные интервалы времени (то есть периодически), или через случайные интервалы времени (то есть спорадически).
[0030] Затем на этапе 304 контроллер 218 может быть выполнен с возможностью выделения одной или более гармоник, кратных трем, порядка девятой гармоники и больше, чем девятая гармоника основной частоты сигнала фазного напряжения, соответствующего одной или более фазным клеммам 206-210. Другие детали способа выделения одной или более гармоник, кратных трем, порядка девятой гармоники и больше, чем девятая гармоника, подробно изложены со ссылкой на фиг. 4.
[0031] Следует отметить, что фазовый угол гармоники, кратной трем, является показателем углового положения ротора (то есть положения ротора). Соответственно, на этапе 306 контроллер 218 может быть выполнен с возможностью определения положения ротора ВПМ двигателя 202 на основании выделенной одной или более гармоник, кратных трем. Более конкретно, контроллер 218 может быть выполнен с возможностью определения положения ротора ВПМ двигателя 202 на основании выделенной одной или более гармоник, кратных трем, порядка девятой гармоники и больше, чем девятая гармоника. В некоторых вариантах выполнения положение ротора может быть определено на сновании фазового угла выделенных гармоник, кратных трем.
[0032] В некоторых вариантах выполнения для определения положения ротора контроллер 218 может быть выполнен с возможностью идентификации фазового угла выделенной гармоники (гармоник), кратной трем, порядка девятой гармоники и больше, чем девятая гармоника. В неограничивающем примере контроллер 218 может быть выполнен с возможностью идентификации фазового угла на основании положения перехода через ноль основной гармоники. Термин «положение перехода через ноль» для данной гармоники относится к угловому положению, при котором данная гармоника меняет свою магнитуду с положительного значения на отрицательное значение, или наоборот.
[0033] В частности, в некоторых из этих вариантов выполнения положение ротора может быть одинаковым с фазовым углом выделенных гармоник, кратных трем. Соответственно, в этих вариантах выполнения контроллер 218 может быть выполнен с возможностью определения положения ротора, как эквивалентного фазе выделенных гармоник, кратных трем. В некоторых вариантах выполнения положение ротора может быть эквивалентно фазовому углу выделенных гармоник, кратных трем, с фазовым сдвигом, причем фазовый сдвиг может быть положительным или отрицательным. В некоторых вариантах выполнения величина фазового сдвига может зависеть от тока, полученного ВПМ двигателем 202.
[0034] В частности, в некоторых вариантах выполнения, если выделена одна гармоника, кратная трем, порядка девятой гармоники и больше, чем девятая гармоника (на этапе 304), то контроллер, на этапе 306, также выполнен с возможностью определения положения ротора на основании фазового угла, соответствующего выделенной одной гармонике, кратной трем. В неограничивающем примере положение ротора может быть аналогичным фазовому углу, соответствующему выделенной одной гармонике, кратной трем. В некоторых вариантах выполнения, если выделено несколько гармоник, кратных трем, порядка девятой гармоники и больше, чем девятая гармоника, то контроллер дополнительно выполнен с возможностью определения среднего фазового угла из фазовых углов, соответствующих нескольким гармоникам, кратным трем. Затем контроллер 218 может быть выполнен с возможностью определения положения ротора на основании среднего фазового угла. В некоторых вариантах выполнения положение ротора может быть аналогичным среднему фазовому углу. В некоторых других вариантах выполнения положение ротора может быть эквивалентным среднему фазовому углу с фазовым сдвигом, причем фазовый сдвиг может быть положительным или отрицательным. В некоторых вариантах выполнения величина фазового сдвига может зависеть от тока, полученного ВПМ двигателем 202.
[0035] В конкретных вариантах выполнения контроллер 218 может быть выполнен с возможностью определения фазового сдвига на основании, например, таблицы соответствия. В неограничивающем примере таблица соответствия может быть создана на основании анализа ВПМ двигателя 202 методом конечных элементов. Таблица соответствия может содержать различные значения фазового сдвига, соответствующие различным значениям тока, полученного ВПМ двигателем 202. Как было отмечено ранее, ток, полученный ВПМ двигателем 202, может быть определен контроллером 218 на основании сигналов, принятых от одного или более датчиков 221 тока. Соответственно, когда фазовый угол (или средний фазовый угол) определен, контроллер также может быть выполнен с возможностью идентификации фазового сдвига на основании тока, полученного ВПМ двигателем 202 на основании таблицы соответствия. Затем контроллер 218 может быть выполнен с возможностью определения положения ротора как суммы фазового угла (или среднего фазового угла) и идентифицированного фазового сдвига, причем фазовый сдвиг может быть положительным или отрицательным.
[0036] В некоторых вариантах выполнения для того, чтобы определить положение ротора, может быть преимущественным использовать гармоники, кратные трем, порядка девятой гармоники и больше, чем девятая гармоника ВПМ двигателя по сравнению с третьей гармоникой. Это связано с тем, что гармоники, кратные трем, порядка девятой гармоники и больше, чем девятая гармоника обратной ЭДС (например, сигнала (сигналов) фазного напряжения), подвергаются меньшему влиянию по сравнению с воздействием второй гармоники профиля индуктивности на третью гармонику обратной ЭДС из-за предшествующих гармоник профиля индуктивности ВПМ двигателя 202. Например, искажающее действие восьмой гармоники профиля индуктивности на девятую гармонику профиля индуктивности обратной ЭДС является меньшим по сравнению с искажающим действием второй гармоники профиля индуктивности на третью гармонику профиля индуктивности обратной ЭДС, так как магнитуда восьмой гармоники значительно меньше, чем магнитуда второй гармоники. Соответственно влияние изменений тока нагрузки уменьшается на гармониках, кратных трем, порядка девятой гармоники, и больше, чем девятая гармоника обратной ЭДС.
[0037] Помимо этого, в некоторых вариантах выполнения на этапе 308 контроллер 218 может быть предназначен для создания одного или боле управляющих сигналов на основании по меньшей мере положения ротора, определенного на этапе 306. В некоторых вариантах выполнения контроллер 218 может дополнительно создавать один или более управляющих сигналов исходя из требуемого вращающего момента и требуемой рабочей скорости (оборотов в минуту) ВПМ двигателя 202.
[0038] В дополнение к этому, на этапе 310 по меньшей мере один из фазного тока и фазного напряжения может быть подано к одной или более фазным клеммам 206-210 исходя по меньшей мере из положения ротора для содействия работе ВПМ двигателя 202 при требуемой скорости и одновременном поддержании требуемого вращающего момента. Более конкретно, инвертор 220 может быть предназначен для регулирования подачи фазного тока и/или фазного напряжения на основании одного или более управляющих сигналов, принятых от контролера 218. Например, на основании управляющих сигналов, принятых от контролера 218, инвертор 220 может быть предназначен для регулирования амплитуды, частоты и/или фазы фазного тока и/или фазного напряжения, подводимого к фазным клеммам 206-210 так, что ВПМ двигатель 202 может быть приведен в действие при требуемой скорости и одновременном поддержании требуемого вращающего момента.
[0039] Фиг. 4 представляет собой блок схему 400 иллюстративного способа выделения одной или более гармоник, кратных трем, порядка девятой гармоники и больше, чем девятая гармоника, в соответствии с аспектами данного изобретения. В частности, блок схема 400 показывает подробно способ выполнения этапа 304, показанного на фиг. 3, для выделения одной или более гармоник, кратных трем, порядка девятой гармоники, и больше, чем девятая гармоника основной частоты сигнала фазного напряжения, соответствующего одной или более фазным клеммам 206-210.
[0040] Как было отмечено ранее, на этапе 302 контроллер 218 может находиться в состоянии приема сигналов фазного напряжения от сенсорной электроники 216. В некоторых вариантах выполнения на этапе 402 контроллер 218, как вариант, может быть предназначен для суммирования сигналов фазного напряжения для создания суммарного сигнала. В некоторых вариантах выполнения суммарный сигнал содержит гармоники, кратные трем, основной частоты.
[0041] Кроме того, в некоторых вариантах выполнения на этапе 404 контроллер 218 также может быть предназначен для определения основной частоты сигнала фазного напряжения исходя из по меньшей мере одного из сигнала фазного напряжения и фазного тока, соответствующего одной или более фазным клеммам 206-210. В типичном случае, основные частоты всех трех сигналов фазного напряжения являются по существу подобными. Как было отмечено ранее, фазный ток, полученный ВПМ двигателем 202 на одной или более фазных клеммах 206-210, может быть подан к контроллеру 218 посредством датчиков 221 тока. В некоторых вариантах выполнения основная частота может быть подобна частоте фазного тока (принятого от датчиков 221 тока), соответствующей одной или более фазным клеммам 206-210. В некоторых вариантах выполнения основная частота может быть подобна частоте фазного напряжения сигналов фазного напряжения (создаваемых сенсорной электроникой 216), соответствующей одной или более фазным клеммам 206-210.
[0042] Следует отметить, что хотя на фиг. 4 показан этап 404, следующий за этапом 402, тем не менее, этап 404 также может быть выполнен до этапа 402 или параллельно с ним без ограничения объема правовой охраны данного изобретения.
[0043] Помимо этого, на этапе 406 контроллер 218 может выделять гармоники, кратные трем, порядка девятой гармоники, и больше, чем девятая гармоника. В некоторых вариантах выполнения контроллер 218 может выделять гармоники, кратные трем, порядка девятой гармоники, и больше, чем девятая гармоника, из суммарного сигнала. В некоторых вариантах выполнения контроллер 218 может выделять гармоники, кратные трем, порядка девятой гармоники, и больше, чем девятая гармоника, из одного или более сигналов фазного напряжения.
[0044] В одном варианте выполнения для выделения гармоник, кратных трем, порядка девятой гармоники и больше, чем девятая гармоника, контроллер 218 может быть предназначен для определения их соответственных гармонических частот на основании определенной основной частоты (F). Например, контроллер 218 может определять частоту (F9) девятой гармоники как 9 × F. Подобным образом, контроллер 218 может также определять гармонические частоты, соответствующие гармоникам, кратным трем, большим, чем девятая гармоника.
[0045] Преимущественно, для частот гармоник, кратных трем, более высокого порядка может уменьшаться влияние изменений нагрузки на соответствующие гармоники, кратные трем. Однако при увеличении порядка частот гармоник, кратных трем, уменьшается магнитуда соответствующих гармоник, кратных трем. Следовательно, несмотря на то, что может быть желательным использовать гармоники, кратные трем, более высокого порядка для определения положения ротора, тем не менее, может быть желательным идентифицировать конкретную гармонику, кратную трем, на основании соответствующей магнитуды этой гармоники, кратной трем. Таким образом, в некоторых вариантах выполнения контроллер 218 может быть предназначен для идентификации конкретной гармоники, кратной трем, порядка девятой гармоники и больше, чем девятая гармоника, на основании ответствующих магнитуд конкретной гармоники, кратной трем. Кроме того, в некоторых вариантах выполнения для идентификации конкретной гармоники, кратной трем, контроллер 218 может быть предназначен для сравнения магнитуд гармоник, кратных трем, порядка девятой гармоники и больше, чем девятая гармоника, с пороговым значением магнитуды. В одном варианте выполнения контроллер 218 может быть предназначен для сравнения магнитуд гармоник, кратных трем, порядка девятой гармоники и больше, чем девятая гармоника, с пороговым значением магнитуды в убывающем порядке частот гармоник, кратных трем. Кроме того, после выполнения сравнения контроллер 218 может быть предназначен для идентификации одной или более гармоник, кратных трем, имеющих магнитуды, превышающие пороговое значение.
[0046] В некоторых вариантах выполнения контроллер 218 может быть предназначен для идентификации одной гармоники, кратной трем, исходя из порогового значения магнитуды. В частности, если соответствующая магнитуда конкретной одной гармоники, кратной трем, превышает пороговое значение магнитуды, то контроллер 218 идентифицирует конкретную одну гармонику, кратную трем. После проведения сравнения в убывающем порядке частот гармоник, кратных трем в некоторых вариантах выполнения контроллер 218 может быть предназначен для идентификации одной гармоники, кратной трем, для которой, прежде всего, выполняется идентификация условия превышения соответствующей магнитудой порогового значения магнитуды. В некоторых других вариантах выполнения контроллер 218 может быть предназначен для идентификации нескольких гармоник, кратных трем, порядка девятой гармоники и больше, чем девятая гармоника, имеющих соответствующие магнитуды, превышающие пороговое значение магнитуды.
[0047] В некоторых вариантах выполнения контроллер 218 может быть предназначен для идентификации одной гармоники, кратной трем, (порядка девятой гармоники и больше, чем девятая гармоника), имеющей наибольшую магнитуду.
[0048] В некоторых вариантах выполнения после идентификации одной или нескольких гармоник, кратных трем, контроллер 218 может быть предназначен для выделения идентифицированной гармоники, кратной трем, из суммарного сигнала. В некоторых вариантах выполнения контроллер 218 может выделять идентифицированные гармоники, кратные трем, посредством умножения синусоидального сигнала соответствующей гармонической частоты на суммарный сигнал. Например, если идентифицированная гармоника, кратная трем, является девятой гармоникой (т.е. одной гармоникой, кратной трем), то контроллер 218 может быть предназначен для умножения синусоидального сигнала частоты 9 × F на суммированный сигнал, чтобы выделить девятую гармонику. Подобным образом, если идентифицированные гармоники, кратные трем, являются девятой, пятнадцатой и двадцать первой гармониками (т.е. множеством гармоник, кратных трем), то контроллер 218 может быть предназначен для раздельного умножения суммарного сигнала на синусоидальный сигнал частот 9 × F, 15 × F, 21 × F, соответственно, для выделения девятой, пятнадцатой и двадцать первой гармоник.
[0049] В некоторых других вариантах выполнения после идентификации одной или нескольких гармоник, кратных трем, контроллер 218 может быть предназначен для выделения идентифицированной гармоники, кратной трем, из любого из сигналов фазного напряжения, например, посредством использования узкополосного режекторного фильтра. В некоторых вариантах выполнения контроллер 218 может выделять идентифицированные гармоники, кратные трем, посредством умножения синусоидального сигнала соответствующей гармонической частоты на заданный сигнал фазного напряжения из сигналов фазного напряжения. В некоторых вариантах выполнения результирующий сигнал, полученный в результате данного умножения, может быть дополнительно проведен через фильтр нижних частот. Например, если идентифицированная гармоника, кратная трем, является девятой гармоникой (т.е. одной гармоникой, кратной трем), то контроллер 218 может быть предназначен для умножения синусоидального сигнала частоты 9 × F на заданный сигнал фазного напряжения, чтобы выделить девятую гармонику. Подобным образом, если идентифицированные гармоники, кратные трем, являются девятой, пятнадцатой и двадцать первой гармониками (т.е. множеством гармоник, кратных трем), то контроллер 218 может быть предназначен для раздельного умножения заданного сигнала фазного напряжения на синусоидальные сигналы частот 9 × F, 15 × F, 21 × F, соответственно, для выделения девятой, пятнадцатой и двадцать первой гармоник.
[0050] В некоторых вариантах выполнения контроллер 218 может быть предварительно настроен на выбор конкретной гармоники, кратной трем, порядка девятой гармоники и больше, чем девятая гармоника. В одном варианте выполнения данные, соответствующие определенным гармоникам, кратным трем, которые необходимо выделить, могут быть сохранены в запоминающем устройстве, связанном с контроллером 218. Например, после создания контроллером 218 суммарного сигнала, контроллер 218 может выделить определенную гармонику, кратную трем, из суммарного сигнала. В неограничительном примере, если определенная гармоника, кратная трем, является девятой гармоникой, то контроллер 218 может быть предназначен для умножения синусоидального сигнала частоты 9 × F на суммарный сигнал (или заданный сигнал фазного напряжения) для выделения девятой гармоники.
[0051] Любые из приведенных выше этапов и/или элементов устройства могут быть соответственно заменены, переупорядочены, или изъяты, при этом могут быть вставлены дополнительные этапы в зависимости от потребностей конкретного применения, устройства вышерассмотренных вариантов выполнения могут быть выполнены с использованием разнообразных подходящих процессов и элементов устройства без ограничения каким-либо конкретным аппаратным обеспечением компьютера, программным обеспечением, промежуточным программным обеспечением, программно-аппаратным обеспечением, компьютерной программой и подобным им.
[0052] Кроме того, приведенные выше примеры, иллюстрации и этапы способа, такие как те, которые могут быть выполнены контроллером 218 могут быть реализованы посредством соответствующей машинной программы на процессорном устройстве, таком как универсальный или специализированный компьютер. Различные реализации устройств и способов могут выполнять некоторые или все из этапов, приведенных в данном документе, в различном порядке, параллельно или по существу одновременно. Кроме того, функции могут быть реализованы на различных языках программирования, включая, но без ограничения этим, язык программирования С++ или Jva. Такая машинная программа может быть сохранена или выполнена с возможностью сохранения на одном или более программоносителях компьютера, таких как микромодуль с архивными данными, локальный или дистанционный жесткий диск, оптические диски (т.е. CD или DVD-диски), запоминающее устройство или другая среда, доступ к которым может обеспечивать процессорное устройство для выполнения сохраненной машинной программы.
[0053] Устройства и способы, рассмотренные в данном документе, способствуют определению положении ротора в ВПМ двигателях. Более конкретно, устройства и способы, рассмотренные в данном документе, способствуют определению положении ротора без использования каких-либо датчиков положения и/или кодовых датчиков положения с уменьшением тем самым общей стоимости устройств двигателей. Также, Двигательная установка в соответствии с вариантами данного изобретения является компактным, так как не используются датчики положения и/или кодовые датчики положения. Помимо этого, устройства и способы, рассмотренные в данном документе, способствуют надежному и точному определению положения ротора за счет использования данных, соответствующих одной или более гармоник, кратных трем, порядка девятой гармоники или больше, чем девятая гармоника.
[0054] Следует понимать, что варианты вышеупомянутых и других свойств, а также функции или альтернативы этому могут быть использованы в сочетании для создания других различных устройств или прикладных программ. Предполагается, что различные непредвиденные альтернативы, модификации, изменения или улучшения, которые впоследствии могут быть внесены специалистами в данной области техники, также охвачены нижеследующими вариантами выполнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНЦИЯ УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2012 |
|
RU2507418C1 |
| МОДУЛЬНАЯ МНОГОФАЗНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2014 |
|
RU2633379C2 |
| СПОСОБ И УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ С ВНУТРЕННИМИ ПОСТОЯННЫМИ МАГНИТАМИ | 2010 |
|
RU2414047C1 |
| Система извлечения флюида, подсистема управления, способ управления рабочими скоростями электрических машин и способ управления электрической машиной | 2016 |
|
RU2715416C2 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД И СПОСОБ УПРАВЛЕНИЯ ИМ | 2008 |
|
RU2477561C2 |
| Бесконтактная электрическая машина постоянного тока (ее варианты) | 1985 |
|
SU1274081A1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ МОЩНОСТЬЮ | 2022 |
|
RU2835542C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ С ШИМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2091979C1 |
| КОНТРОЛЛЕР ВРАЩАЮЩЕЙСЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2008 |
|
RU2431916C1 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА УПРАВЛЕНИЯ НАДДУВОМ | 2015 |
|
RU2705490C2 |
Изобретение относится к области электротехники. Технический результат – обеспечение надежного и точного определения положения ротора. Блок управления для двигателя на внутренних постоянных магнитах (ВПМ) содержит сенсорную электронику, предназначенную для считывания фазного напряжения, соответствующего одной или более фазным клеммам ВПМ двигателя, с целью создания соответствующего сигнала фазного напряжения. Блок управления дополнительно содержит контроллер, электрически присоединенный к сенсорной электронике и предназначенный для выделения одной или более гармоник, кратных трем, порядка девятой гармоники или больше, чем девятая гармоника основной частоты сигнала фазного напряжения, соответствующего указанной одной или более фазным клеммам. Контроллер дополнительно предназначен для определения углового положения ротора ВПМ двигателя, исходя из выделенной одной или более гармоник, кратных трем. Также представлены относящиеся к данному изобретению двигательная установка и способ управления ВПМ двигателем. 3 н. и 19 з.п. ф-лы, 4 ил.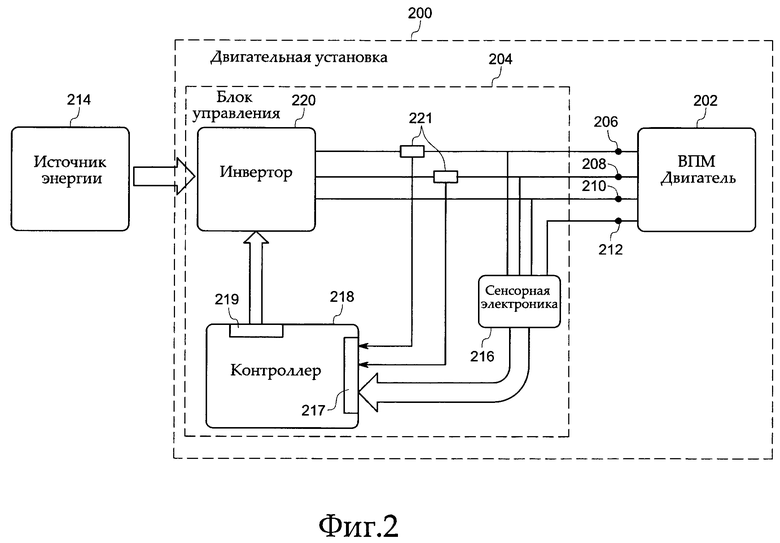
1. Блок управления для двигателя на внутренних постоянных магнитах, содержащий
сенсорную электронику, предназначенную для считывания фазного напряжения, соответствующего одной или более фазным клеммам двигателя на внутренних постоянных магнитах, для создания соответствующего сигнала фазного напряжения, и
контроллер, электрически присоединенный к сенсорной электронике и выполненный с возможностью:
выделения одной или нескольких гармоник, кратных трем, включая девятую гармонику и гармоники, кратные трем, большего порядка, основной частоты сигнала фазного напряжения, соответствующего одной или более фазным клеммам,
определения углового положения ротора указанного двигателя на основании указанной выделенной одной или нескольких гармоник, кратных трем, причем контроллер генерирует по меньшей мере один сигнал, основанный на угловом положении ротора, и
инвертор, выполненный с возможностью регулирования подачи по меньшей мере одного из фазного напряжения и фазного тока на основании, по меньшей мере частично, указанного сигнала.
2. Блок управления по п.1, в котором инвертор электрически присоединен к контроллеру и к одной или более фазным клеммам указанного двигателя.
3. Блок управления по п.1, в котором контроллер дополнительно выполнен с возможностью определения основной частоты сигнала фазного напряжения на основании по меньшей мере одного из сигнала фазного напряжения и фазного тока, соответствующих одной или более фазным клеммам.
4. Блок управления по п.1, в котором контроллер выполнен с возможностью суммирования сигналов фазного напряжения для создания суммарного сигнала, причем суммарный сигнал содержит гармоники, кратные трем.
5. Блок управления по п.4, в котором контроллер дополнительно выполнен с возможностью выделения из суммарного сигнала указанной одной или нескольких гармоник, кратных трем.
6. Блок управления по п.1, в котором контроллер дополнительно выполнен с возможностью выделения из одного или более сигналов фазного напряжения указанной одной или нескольких гармоник, кратных трем.
7. Блок управления по п.1, в котором контроллер дополнительно выполнен с возможностью
сравнения магнитуд указанных одной или нескольких гармоник, кратных трем, с пороговым значением магнитуды, и
идентификации в указанной одной или нескольких гармониках, кратных трем, гармоник, кратных трем, имеющих магнитуды, превышающие пороговое значение магнитуды.
8. Блок управления по п.7, в котором контроллер дополнительно выполнен с возможностью сравнения, в убывающем порядке частот гармоник, кратных трем, магнитуд указанной одной или нескольких гармоник, кратных трем, с пороговым значением магнитуды.
9. Блок управления по п.7, в котором контроллер выполнен с возможностью выделения из указанной одной или нескольких гармоник, кратных трем, гармоники, кратной трем, для которой, прежде всего, выполняется идентификация условия превышения соответствующей магнитудой порогового значения магнитуды.
10. Блок управления по п.1, в котором контроллер выполнен с возможностью выделения из указанной одной или нескольких гармоник, кратных трем, гармоники, кратной трем, имеющей наибольшую магнитуду.
11. Блок управления по п.1, в котором, если из указанной одной или нескольких гармоник, кратных трем, выделено множество гармоник, кратных трем, то контроллер дополнительно выполнен с возможностью
определения среднего фазового угла из фазовых углов, соответствующих множеству гармоник, кратных трем, и
определения углового положения ротора на основании среднего фазового угла.
12. Блок управления по п.1, в котором, если из указанной одной или нескольких гармоник, кратных трем выделена одна гармоника, кратная трем, то контроллер дополнительно выполнен с возможностью определения углового положения ротора на основании фазового угла, соответствующего выделенной одной гармонике, кратной трем.
13. Двигательная установка, содержащая
двигатель на внутренних постоянных магнитах, содержащий одну или более фазных клемм, ротор и статор, и
блок управления, электрически присоединенный к указанному двигателю на одной или более фазных клеммах, причем блок управления содержит
сенсорную электронику, предназначенную для считывания фазного напряжения, соответствующего указанной одной или более фазным клеммам с целью создания соответствующего сигнала фазного напряжения,
контроллер, электрически присоединенный к сенсорной электронике и выполненный с возможностью:
выделения одной или нескольких гармоник, кратных трем, включая девятую гармонику и гармоники, кратные трем, большего порядка, основной частоты сигнала фазного напряжения, соответствующего указанной одной или более фазным клеммам, и
определения углового положения ротора на основании выделенной указанной одной или нескольких гармоник, кратных трем, причем контроллер генерирует по меньшей мере один сигнал, основанный на угловом положении ротора, и
инвертор, выполненный с возможностью регулирования подачи по меньшей мере одного из фазного напряжения или фазного тока на основании, по меньшей мере частично, указанного сигнала.
14. Двигательная установка по п.13, в которой инвертор электрически присоединен к контроллеру и к указанной одной или более фазным клеммам указанного двигателя.
15. Способ управления двигателем на внутренних постоянных магнитах, включающий
прием сигналов фазного напряжения, соответствующих одной или более фазным клеммам указанного двигателя,
выделение, с использованием контроллера, электрически присоединенного к сенсорной электронике, одной или нескольких гармоник, кратных трем, включая девятую гармонику и гармоники, кратные трем, большего порядка, основной частоты сигнала фазного напряжения, соответствующего указанной одной или более фазным клеммам,
определение углового положения ротора указанного двигателя на основании указанной выделенной одной или нескольких гармоник, кратных трем,
генерирование сигнала с использованием контроллера, основываясь на угловом положении ротора,
регулирование подачи по меньшей мере одного из фазного напряжения или фазного тока на основании, по меньшей мере частично, указанного сигнала, и
подачу указанного по меньшей мере одного из фазного тока и фазного напряжения к указанной одной или более фазным клеммам, исходя из по меньшей мере углового положения ротора.
16. Способ по п.15, в котором определяют основную частоту сигнала фазного напряжения на основании указанного по меньшей мере одного из сигнала фазного напряжения и фазного тока, соответствующих указанной одной или более фазным клеммам.
17. Способ по п.15, в котором при выделении указанной одной или нескольких гармоник, кратных трем, суммируют сигналы фазного напряжения для создания суммарного сигнала, причем суммарный сигнал содержит гармоники, кратные трем.
18. Способ по п.17, в котором при выделении указанной одной или более гармоник, кратных трем,
сравнивают магнитуды указанной одной или нескольких гармоник, кратных трем, с пороговым значением магнитуды, и
идентифицируют в указанной одной или нескольких гармониках, кратных трем, гармоники, кратные трем, имеющие магнитуды, превышающие пороговое значение магнитуды.
19. Способ по п.18, в котором сравнение выполняют в убывающем порядке частот гармоник, кратных трем.
20. Способ по п.18, в котором при выделении указанной одной или нескольких гармоник, кратных трем, основной частоты выделяют гармонику, кратную трем, для которой, прежде всего, выполняется идентификация условия превышения соответствующей магнитудой порогового значения магнитуды.
21. Способ по п.15, в котором, если из указанной одной или нескольких гармоник, кратных трем, выделено множество гармоник, кратных трем, то при определении углового положения ротора определяют средний фазовый угол из фазовых углов, соответствующих указанному множеству гармоник, кратных трем, и при этом угловое положение ротора определяют на основании среднего фазового угла.
22. Способ по п.15, в котором, если из указанной одной или нескольких гармоник, кратных трем, выделена одна гармоника, кратная трем, то угловое положение ротора определяют на основании фазового угла, соответствующего выделенной указанной одной гармонике, кратной трем.
| US 7511439 В2, 31.03.2009 | |||
| US 4912378 A, 27.03.1990 | |||
| US 5481166 A, 02.01.1996 | |||
| СИЛОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2006 |
|
RU2408971C2 |

