Изобретение относится к светотехническому оборудованию взлетно-посадочной площадке (ВППл) корабля, обеспечивающему пилоту и членам экипажа световую передачу об угле крена и угле дифферента качающейся взлетно-посадочной площадке корабля при висении, посадке и взлете вертолета в условиях плохой видимости.
Для описания заявляемого изобретения «Командно-пилотажный индикатор. Светотехническое оборудование взлетно-посадочной площадки корабля» выбран наиболее близкий по технической сущности прототип: «Устройство светотехнического оборудования ВППл корабля».
Устройство светотехнического оборудования ВППл корабля, наиболее полно описано и представлено в книге «Выполнение полетов с авианесущих кораблей на вертолетах КА-27, КА-29» В.В. Алексеев. УДК 623.822.7:629.7.067. ББК 68.8 А47 Москва 2013. Том 1. Стр. 22, 78, 274 -278. Стр. 65-68, Бездетнов НП Посадка, Кодовые огни стр. 75.
В устройство светотехнического оборудования ВППл корабля входят:
- посадочные огни, предназначенные для обозначения посадочного круга, нанесенного на ВППл корабля;
- пограничные огни, предназначенные для обозначения контура ВППл корабля;
- заградительные огни, предназначенные для обозначения выступающих частей корабля;
- прожекторы подсвета поверхности ВППл корабля, предназначенные для освещения взлетно-посадочной площадки при посадке и взлете вертолета
- прожекторов для подсветки водной поверхности.
В известном светотехническом оборудовании взлетно-посадочной площадки корабля (ВППл корабля), описанной в книге «Выполнение полетов с авианесущих кораблей на вертолетах КА-27, КА-29» В.В. Алексеева, аппаратура обеспечивает посадку вертолета в сложных гидрометеорологических условиях днем и ночью при волнении моря шесть (6) баллов, при бортовой качке восемь градусов (Δγ°=±8°) и килевой качке три градуса (Δν°=±3°) со средними периодами качания палубы двенадцать секунд (Δt=12 секунд). Важной особенностью ВППл кораблей является их подвижность. Вследствие волнения моря и наличия качки, ВППл корабля совершает сложное пространственное движение в земной системе координат. При этом ВППл корабля имеет как линейные, так и угловые перемещения относительно горизонтальной поверхности. Подвижность вертолета, корабля и ВППл корабля требует от летчика, в процессе ночного пилотирования вертолета и пилотирования в сложных метеоусловиях, решения ряда сложных навигационных и пилотажных задач в процессе сближения с кораблем при взлете и посадке на ВППл. Кроме того, переменная и быстро изменяющая обстановка из-за воздушных потоков над ВППл корабля, требует от летчика в процессе взлета вертолета, висения вертолета и посадки вертолета только правильных решений и управляющих действий, большого объема внимания и пространственного видения углового положения ВППл корабля по углу крена, углу дифферента и одновременного видения углового положения своего вертолета по углу крена, углу тангажа с целью обеспечения безопасности полета. Даже при современном светотехническом оборудовании взлетно-посадочной площадки летчик всегда испытывает психофизиологическую и нервную нагрузку, и при этом он должен отвлекаться от показаний навигационных приборов своего вертолета, чтобы не допустить возникающей иллюзии перемещения ВППл корабля в пространстве при больших углах крена и дифферента корабля. Психофизиологическая и нервная нагрузка, которую испытывает летчик, при полете в точку висения над качающейся взлетно-посадочной площадкой (ВППл) корабля, объясняется недостаточным объемом представляемых данных о пространственном состоянии системы «корабль-вертолет» и, соответственно, взаимного движения траектории качающейся взлетно-посадочной площадкой (ВППл) корабля и траекторией вертолета над ВППл корабля.
Чтобы упростить пилотирование вертолета в сложных метеоусловиях, уменьшить для летчиков психофизиологическую и нервную нагрузку при висении вертолета, взлете вертолета и посадки вертолета на качающуюся ВППл корабля, предлагается:
дополнить светотехническое оборудование взлетно-посадочной площадки (ВППл) корабля оборудованием, визуализирующим летчику световыми сигналами истинное угловое положение качающейся плоскости ВППл корабля по углу крена и углу дифферента.
Технической задачей заявляемого изобретения является.
Повышение безопасности полета вертолета при взлете, висении и посадке на качающуюся взлетно-посадочную площадку (ВППл) корабля в сложных метеорологических условиях за счет визуализации летчику угла крена и угла дифферента ВППл корабля.
Снижение психофизиологической и нервной нагрузки летчика при удержании им вертолета в заданных параметрах взлета, висения и посадки на качающуюся (ВППл) корабля в условиях дефицита времени при принятии единственно правильного решения за счет визуализации летчику угла крена и угла дифферента ВППл корабля;
Контроль режима полета вертолета над качающейся (ВППл) корабля без иллюзии перемещения ВППл корабля в пространстве за счет визуализации летчику угла крена и угла дифферента ВППл корабля.
Обеспечение приемлемой безопасности полета и безусловного выполнения полетных заданий летчиками любых квалификаций в любых сложных условиях полета при частичной или полностью вышедшей из строя автоматической части управления, т.е. полностью при ручном управлении.
Техническая задача достигается тем, что светотехническое оборудования взлетно-посадочной площадки корабля, содержащее: фонари подсвета на леерных ограждениях левого и правого борта корабля, посадочные огни для обозначения посадочного круга, нанесенного на ВППл корабля, пограничные огни, для обозначения контура ВППл корабля, прожекторы подсветки для освещения водной поверхности, подсветку ветроуказателя, заградительные огни для обозначения выступающих частей корабля, прожекторы подсвета поверхности ВППл корабля, для освещения ближней и дальней площади взлетно-посадочной площадки корабля при посадке и взлете вертолета, дополнительно снабжено светотехническим оборудованием взлетно-посадочной площадки корабля, визуализирующим летчику световыми сигналами истинное угловое положение качающейся плоскости ВППл корабля по углу крена и углу дифферента, содержащим: источник электропитания, светотехническое оборудование для световой индикации угла крена и угла дифферента взлетно-посадочной площадки корабля, которое содержит, блок гироскопа, датчик текущего угла крена ВППл корабля и датчик текущего угла дифферента ВППл корабля, блок опорного напряжения по углу крена и блок опорного напряжения по углу дифферента, блок мультиканального аналого-цифрового преобразователя по углу крена и блок мультиканального аналого-цифрового преобразователя по углу дифферента, блок аппаратно-логического шифратора по углу крена и блок аппаратно-логического шифратора по углу дифферента, группу элементов сравнения по углу крена, блок заданного цифрового двоичного кода на срабатывание ламп светотехнического оборудования для угла крена, группу элементов сравнения по углу дифферента, блок заданного цифрового двоичного кода на срабатывание ламп светотехнического оборудования для угла дифферента, центральную непрерывно светящуюся лампу, сигнальные непрерывно светящиеся лампы эталонного отклонения взлетно-посадочной площадки корабля, - световой визуализатор по углу крена, крестообразный кронштейн, - световой визуализатор по углу дифферента, элемент сравнения, каждый из которых содержит: цифровой компаратор кодов, вход для первой сравниваемой величины, вход для второй сравниваемой величины, выход результата сравнения, гирлянду ламп, причем, первый выход блока гироскопа с датчика текущего угла крена ВППл корабля соединен по параметру положительного напряжения аналогового сигнала текущего угла крена ВППл корабля с первым входом блока мультиканального аналого-цифрового преобразователя по углу крена, а второй выход блока гироскопа с датчика текущего угла крена ВППл корабля по параметру отрицательного напряжения аналогового сигнала текущего угла крена ВППл корабля соединен со вторым входом блока мультиканального аналого-цифрового преобразователя по углу крена, первый выход блока опорного напряжения по углу крена по параметру постоянного максимального значения положительного напряжения аналогового сигнала опорного угла крена ВППл корабля соединен с третьим входом, а второй выход блока опорного напряжения по углу крена по параметру постоянного максимального значения отрицательного напряжения аналогового сигнала опорного угла крена ВППл корабля соединен с четвертым входом блока мультиканального аналого-цифрового преобразователя по углу крена, выход блока мультиканального аналого-цифрового преобразователя по углу крена по параметру аналогового сигнала текущего угла крена ВППл корабля, преобразованного в цифровой сигнал по углу крена, соединен с входом блока аппаратно-логического шифратора по углу крена, в котором цифровой сигнал по углу крена шифруется в цифровой двоичный код и передается на первый вход группы элементов сравнения по углу крена, второй вход группы элементов сравнения по углу крена связан с выходом блока заданного цифрового двоичного кода на срабатывание ламп светотехнического оборудования для угла крена по параметрам заданного цифрового двоичного кода на срабатывание ламп светотехнического оборудования для угла крена, выход группы элементов сравнения по углу крена связан параметром сигнала результатов сравнения с входом гирлянды ламп светового визуализатора по углу крена, которые уложены в крестообразный кронштейн вдоль стороны перпендикулярной к продольной оси корабля, первый выход блока гироскопа с датчика текущего угла дифферента ВППл корабля соединен по параметру положительного напряжения аналогового сигнала текущего угла дифферента ВППл корабля с первым входом блока мультиканального аналого-цифрового преобразователя по углу дифферента, а второй выход блока гироскопа с датчика текущего угла дифферента ВППл корабля по параметру отрицательного напряжения аналогового сигнала текущего угла крена ВППл корабля соединен со вторым входом блока мультиканального аналого-цифрового преобразователя по углу дифферента, Первый выход блока опорного напряжения по углу дифферента по параметру постоянного максимального значения положительного напряжения аналогового сигнала опорного угла дифферента ВППл корабля соединен с третьим входом, а второй выход блока опорного напряжения по углу дифферента по параметру постоянного максимального значения отрицательного напряжения аналогового сигнала опорного угла дифферента ВППл корабля соединен с четвертым входом блока мультиканального аналого-цифрового преобразователя по углу дифферента, ыход блока мультиканального аналого-цифрового преобразователя по углу дифферента по параметру аналогового сигнала текущего угла дифферента ВППл корабля, преобразованного в цифровой сигнал по углу дифферента, связан с входом аппаратно-логического шифратора по углу дифферента, в котором цифровой сигнал по углу дифферента шифруется в цифровой двоичный код и передается на первый вход группы элементов сравнения по углу дифферента, второй вход группы элементов сравнения по углу дифферента связан с выходом блока заданного цифрового двоичного кода на срабатывание ламп светотехнического оборудования для угла дифферента по параметрам заданного цифрового двоичного кода на срабатывание ламп светотехнического оборудования для угла дифферента, выход группы элементов сравнения по углу дифферента связан параметром сигнала результатов сравнения с входом гирлянды ламп светового визуализатора по углу дифферента, которые уложены в крестообразный кронштейн вдоль стороны параллельной продольной оси корабля, в центре крестообразного кронштейна располагается центральная непрерывно светящаяся лампа, а вдоль сторон крестообразного кронштейна, в которых уложены гирлянды ламп световых визуализаторов, крепятся сигнальные непрерывно светящиеся лампы.
Изобретение поясняется чертежами.
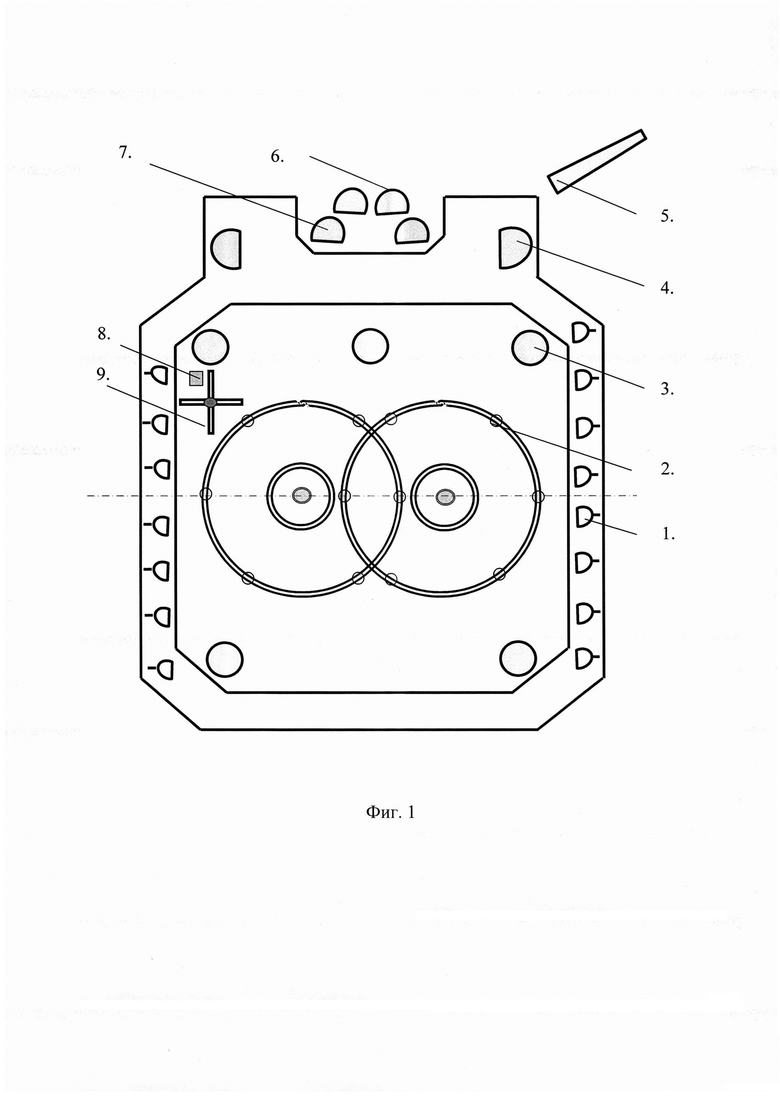
На фиг. 1 Представлено располагаемое на ВППл корабля светотехническое оборудование.
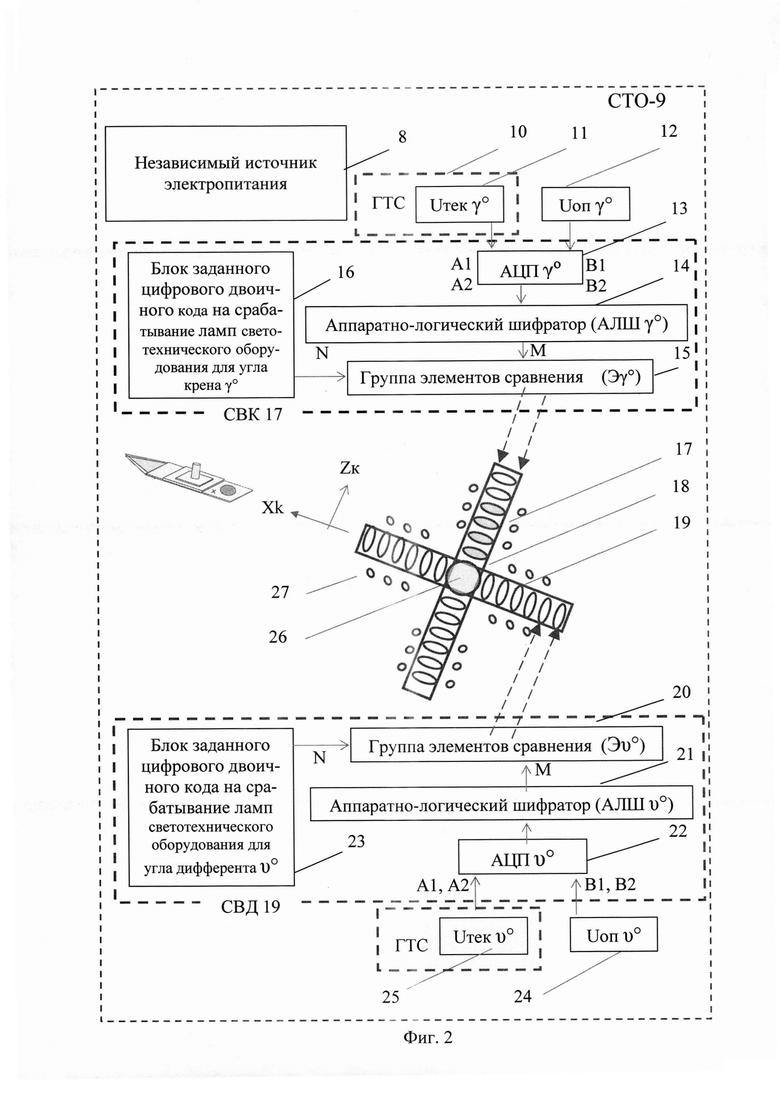
На фиг. 2 Представлена блок-схема светотехнического оборудования корабля для световой индикации угла крена и угла дифферента ВППл;
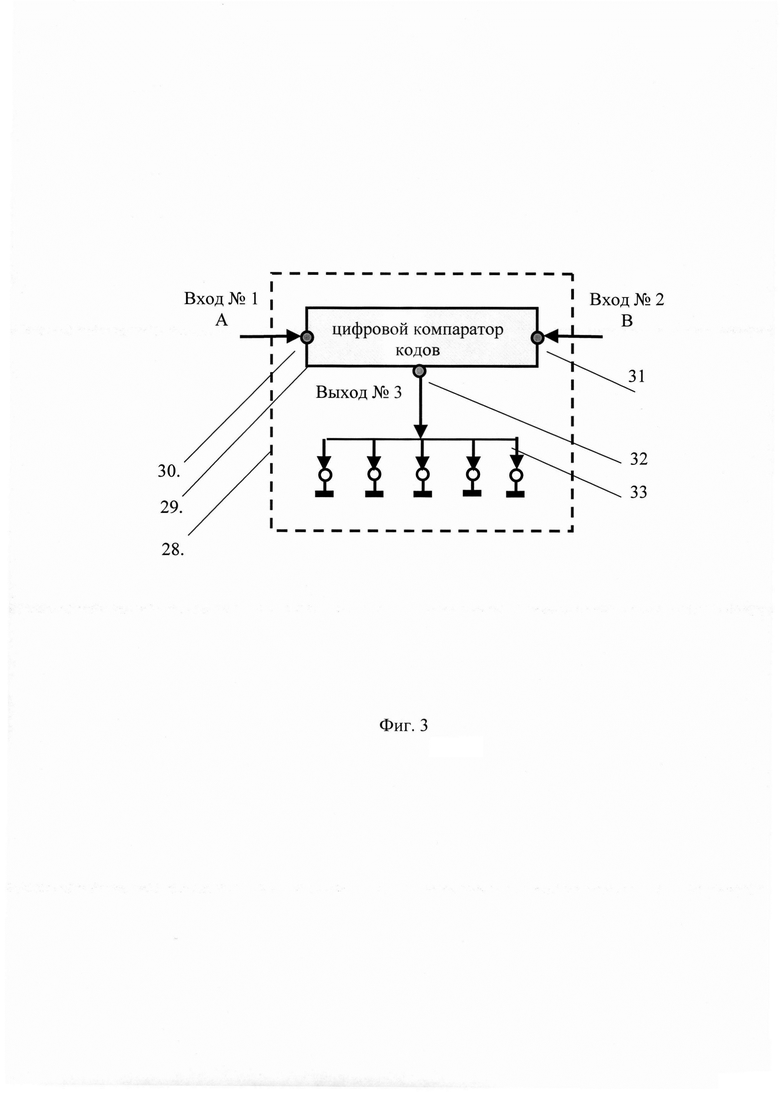
На фиг. 3 Изображена схема элемента сравнения.
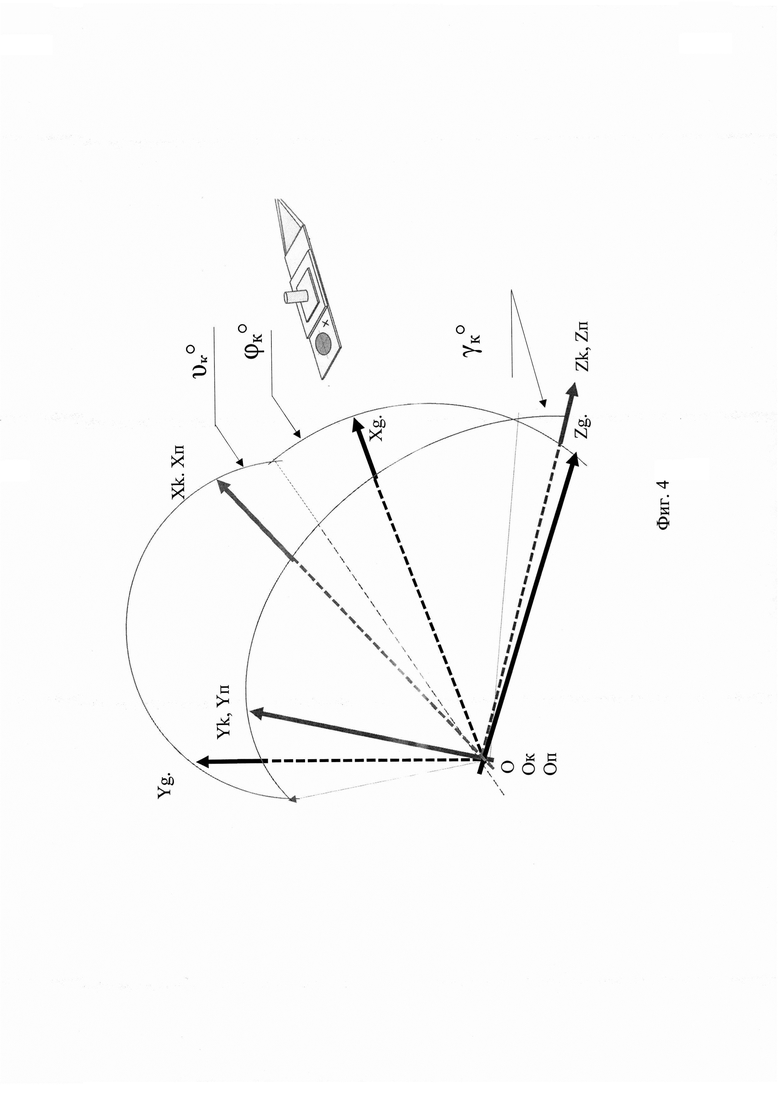
На фиг. 4 Изображена схема преобразования углового положения ВППл корабля в электрическое напряжение.
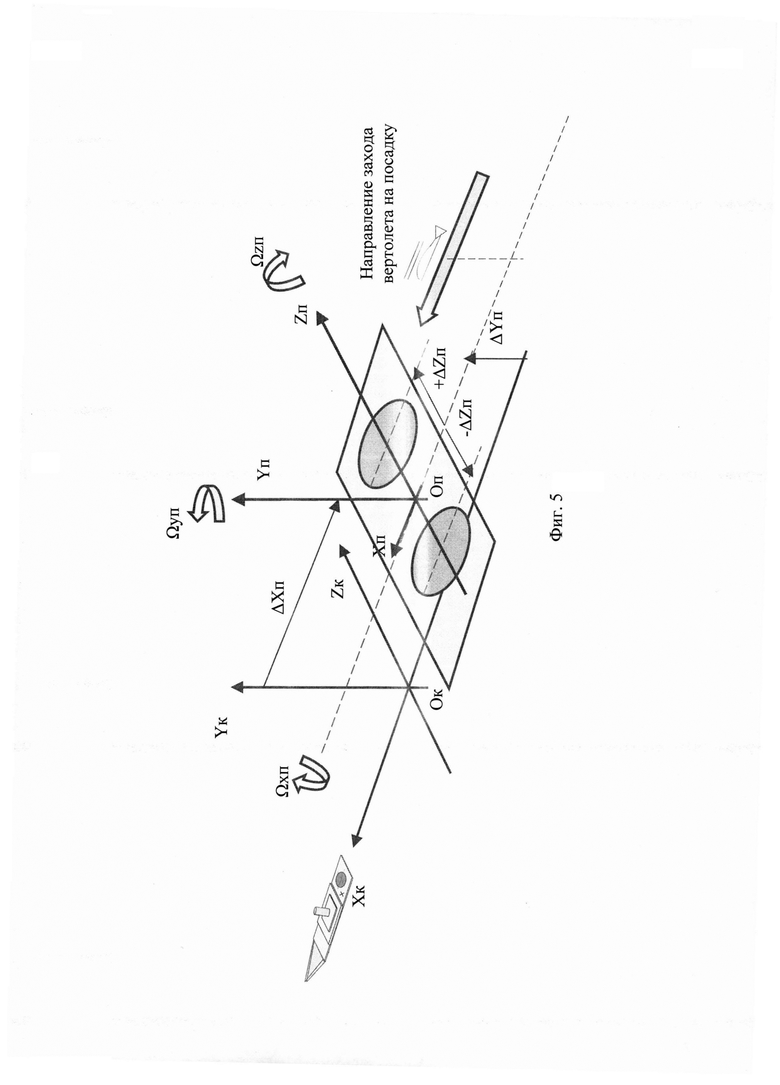
На фиг. 5 Изображено угловое положение системы координат связанной с центром масс корабля относительно земной системы координат.
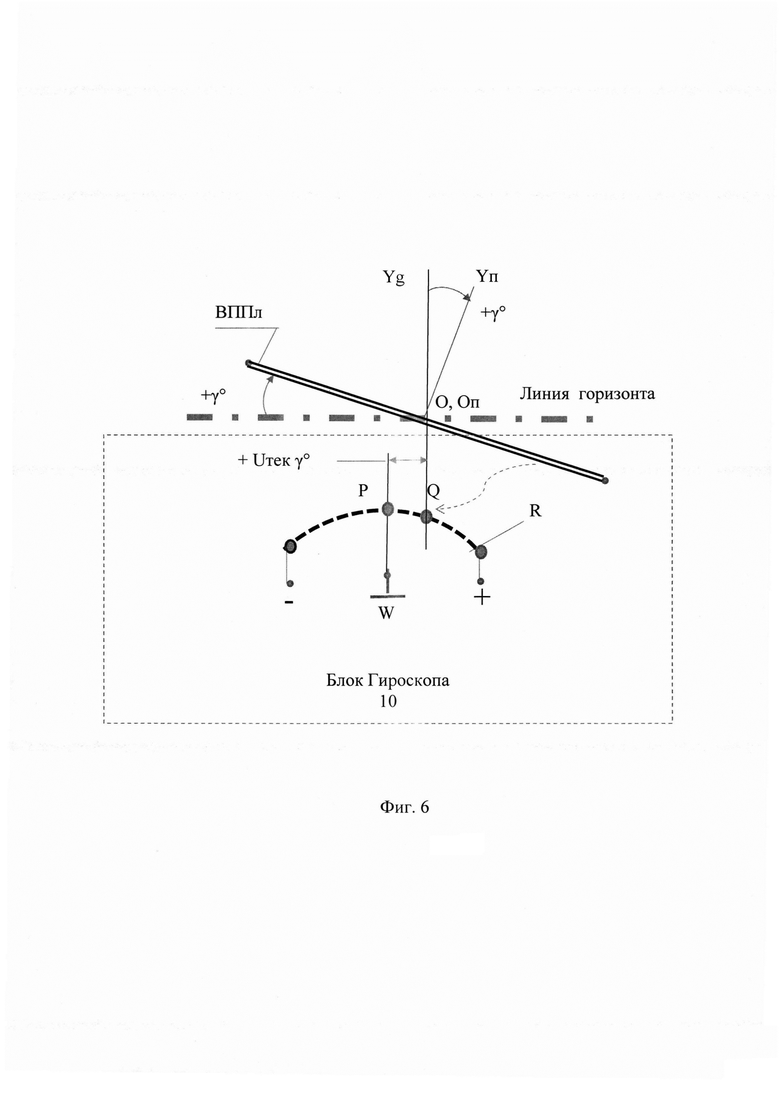
На фиг. 6 Изображены линейные параметры, определяющие положение центра ВППл корабля в системе координат связанной с центром масс корабля.
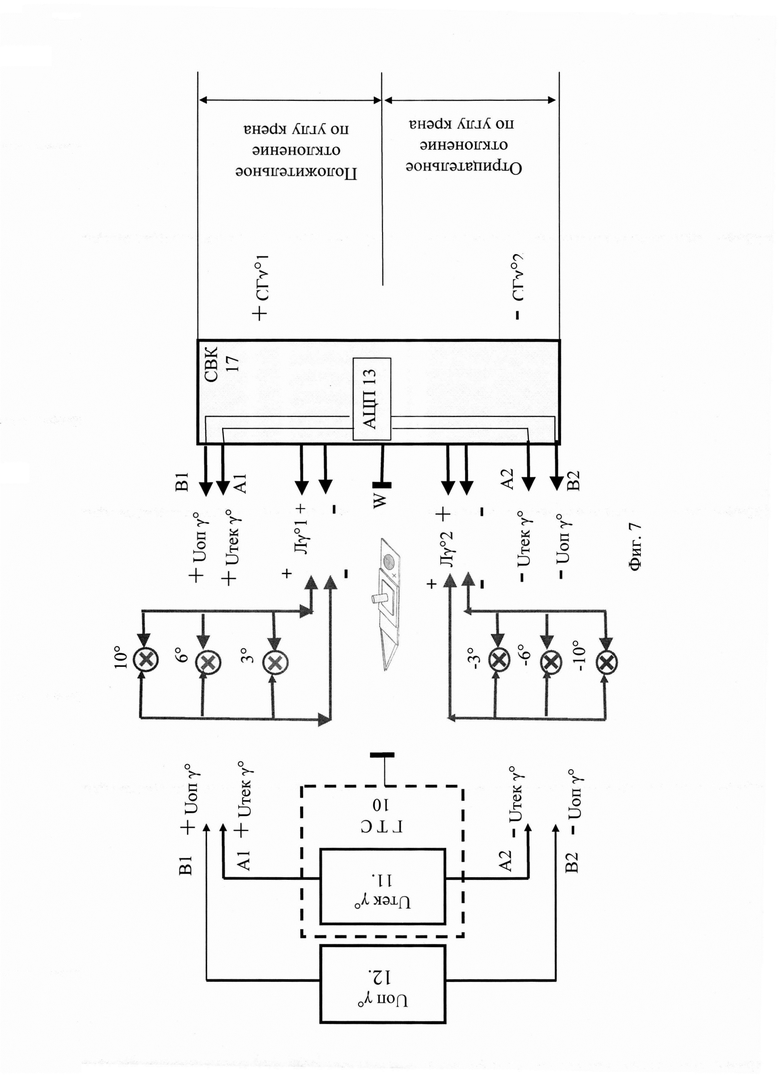
На фиг. 7 Изображена блок-схема электрического подключения к световому визуализатору по углу крена (СВК).
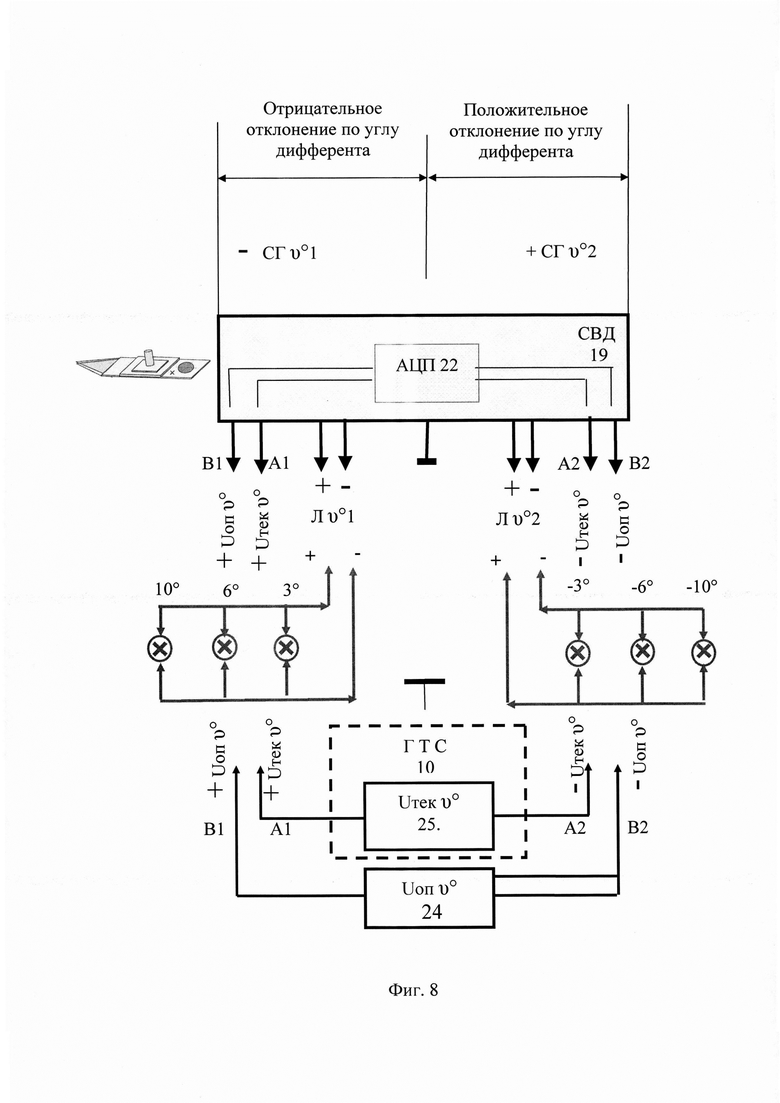
На фиг. 8 Изображена блок-схема электрического подключения к световому визуализатору по углу дифферента (СВД).
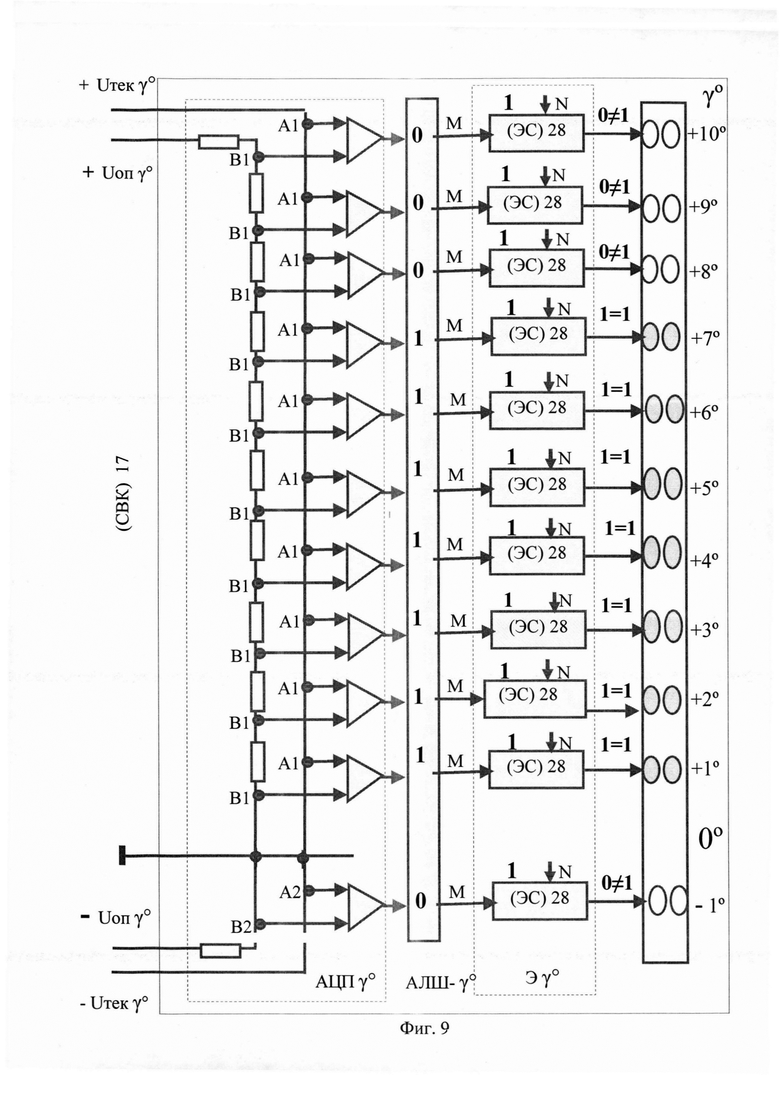
На фиг. 9 Изображена блок-схема заявляемого светового визуализатора по углу крена (СВК).
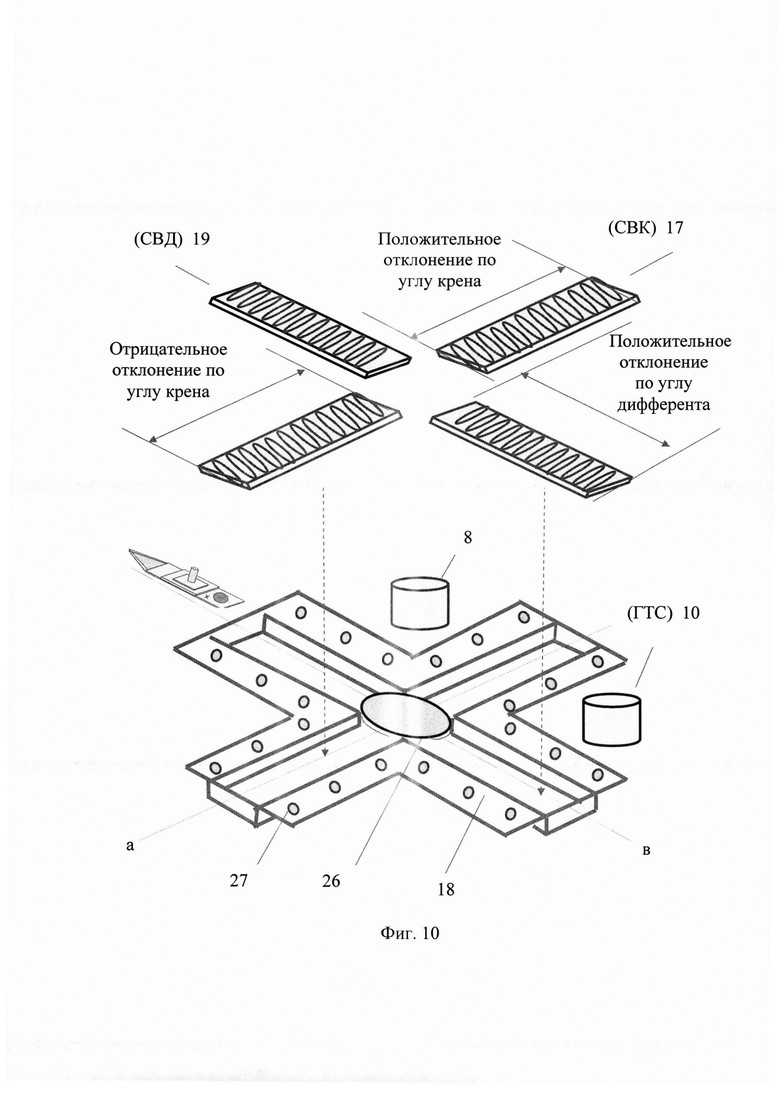
На фиг. 10 представлена схема сборки светотехнического оборудования корабля (СТО) для световой индикации угла крена и угла дифферента ВППл корабля в крестообразный кронштейн.
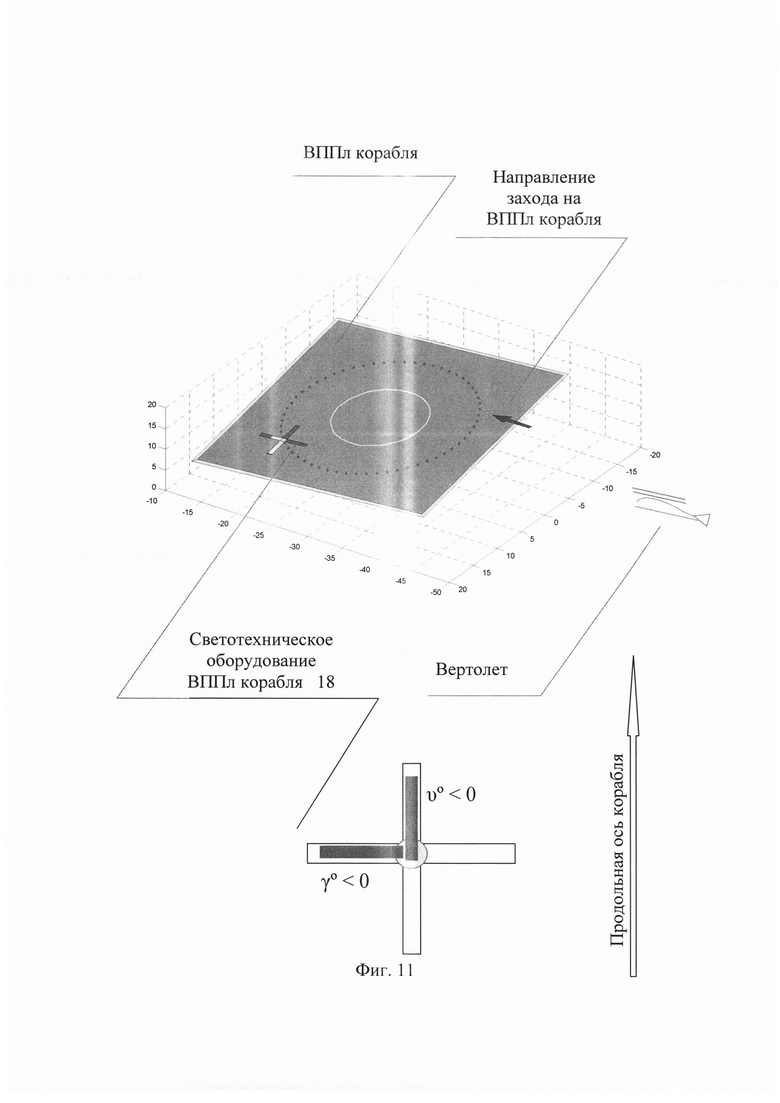
На фиг. 11 Представлено светотехническое оборудование при визуализации углового положения ВППл корабля при отрицательном угле крена и отрицательном угле дифферента ВППл корабля.
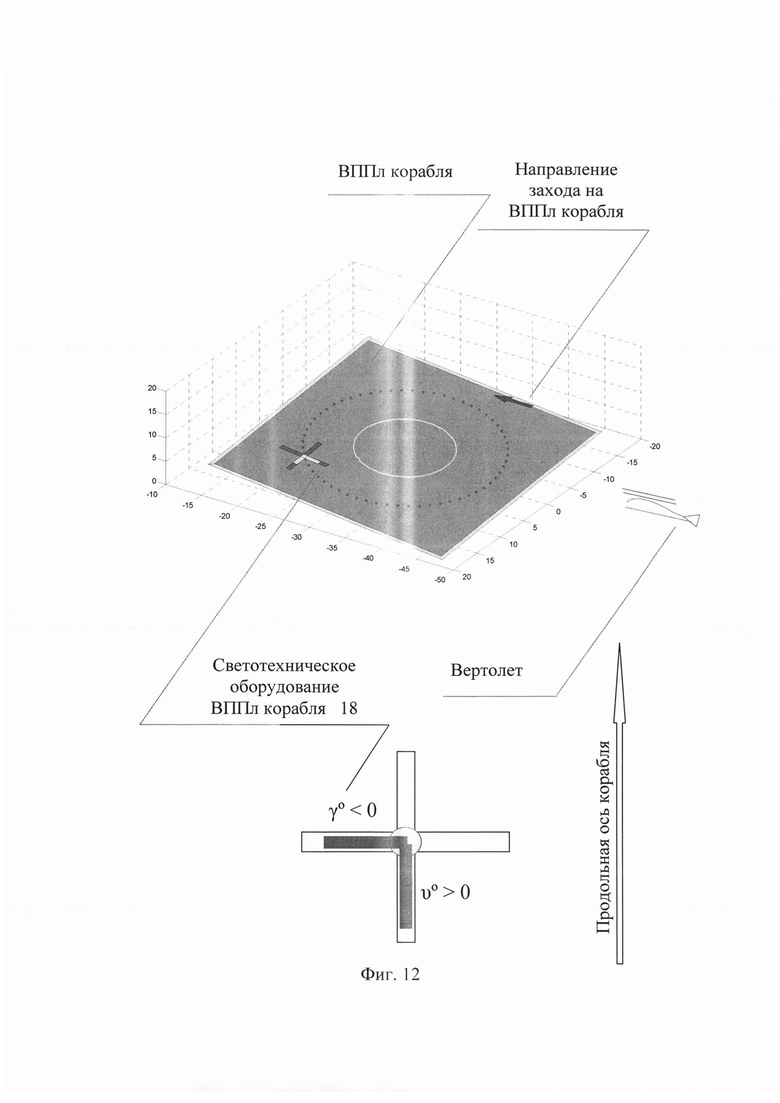
На фиг. 12 Представлено светотехническое оборудование при визуализации углового положения ВППл корабля при отрицательном угле крена и положительном угле дифферента ВППл корабля.
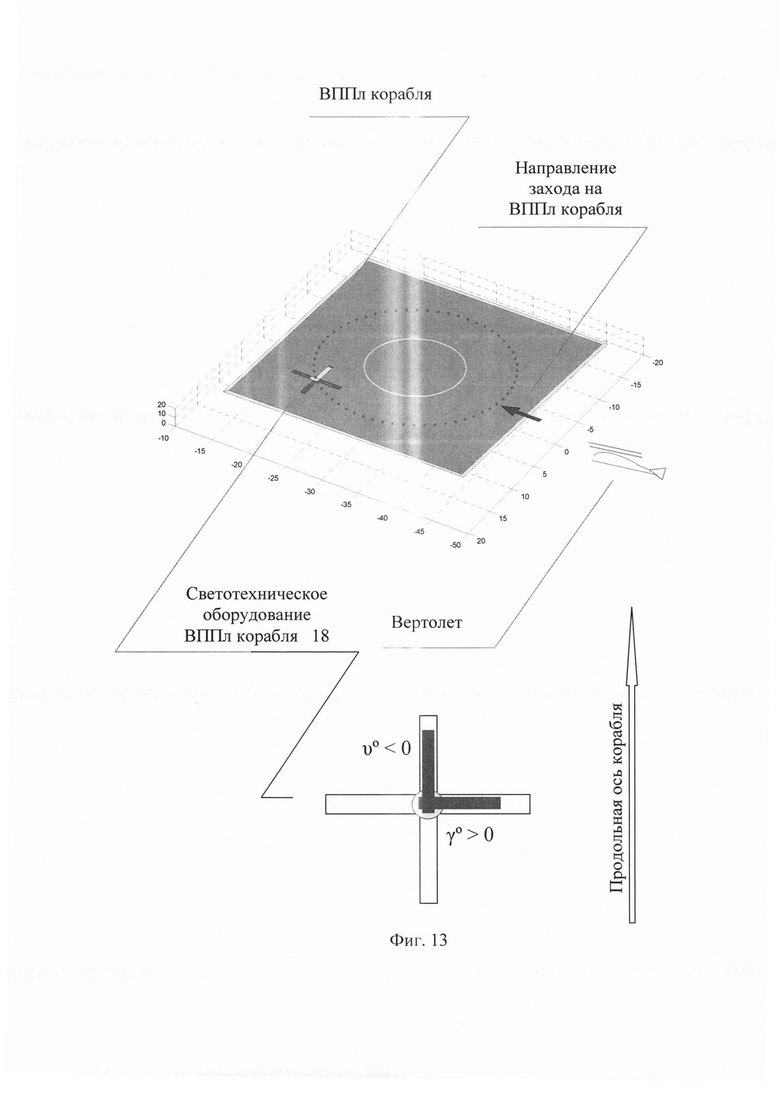
На фиг. 13 Представлено светотехническое оборудование при визуализации углового положения ВППл корабля при положительном угле крена и отрицательном угле дифферента ВППл корабля.
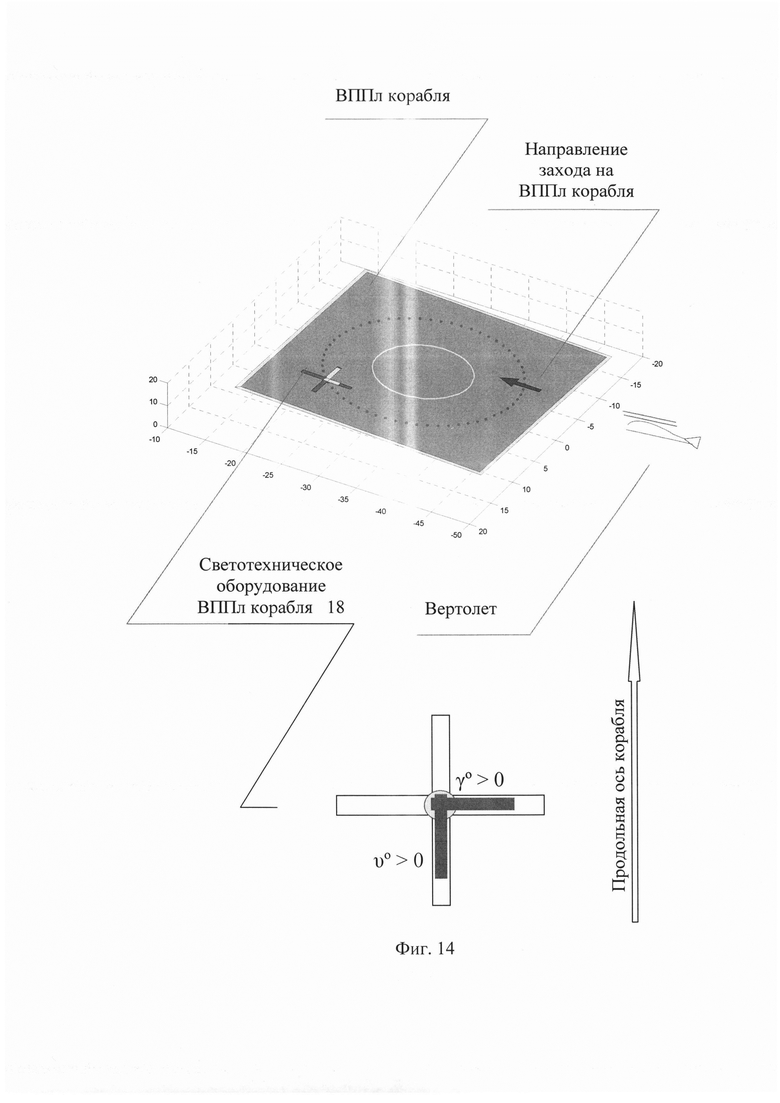
На фиг. 14 Представлено светотехническое оборудование при визуализации углового положения ВППл корабля при положительном угле крена и положительном угле дифферента ВППл корабля.
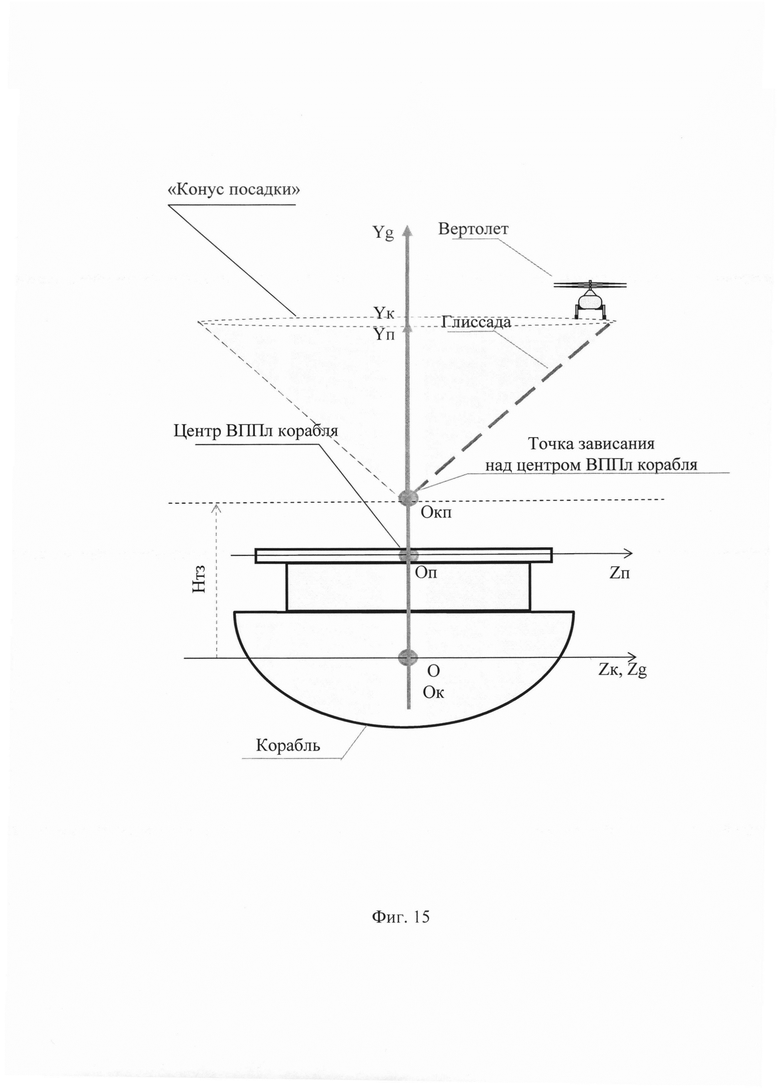
На фиг. 15 Представлена схема взаимного положения земной системы координат, корабельной системы координат, системы координат связанной с ВППл корабля и корабля при нулевом угле крена и дифферента.
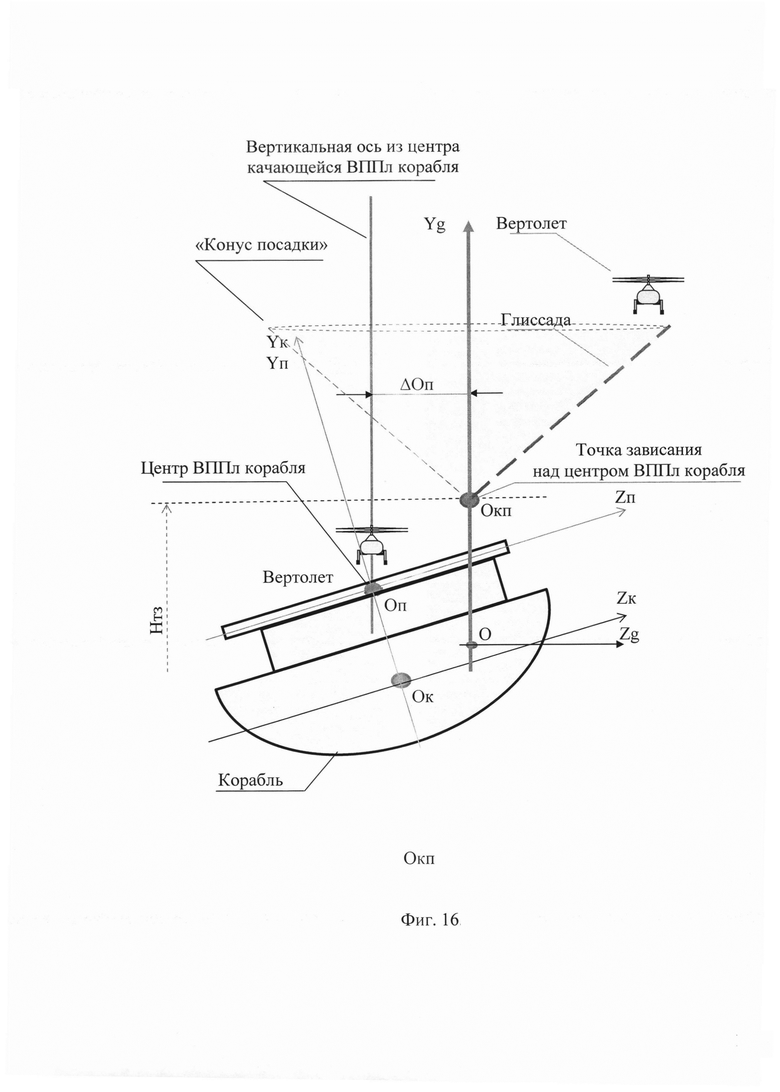
На фиг. 16 Представлена схема взаимного положения земной системы координат, корабельной системы координат, системы координат связанной с ВППл корабля и корабля, когда его угловое и пространственное положение изменилось.
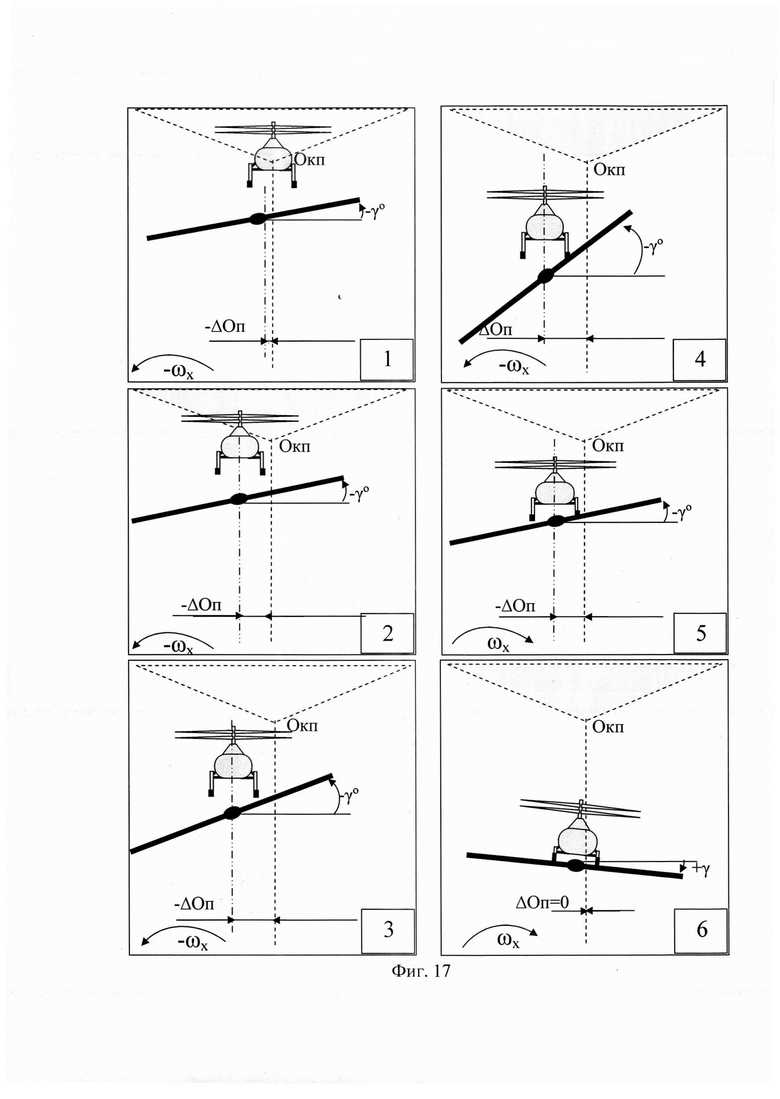
На фигуре 17 представлены фазы посадки вертолета на качающуюся ВППл корабля из точки зависания (Окп) над ВППл корабля.
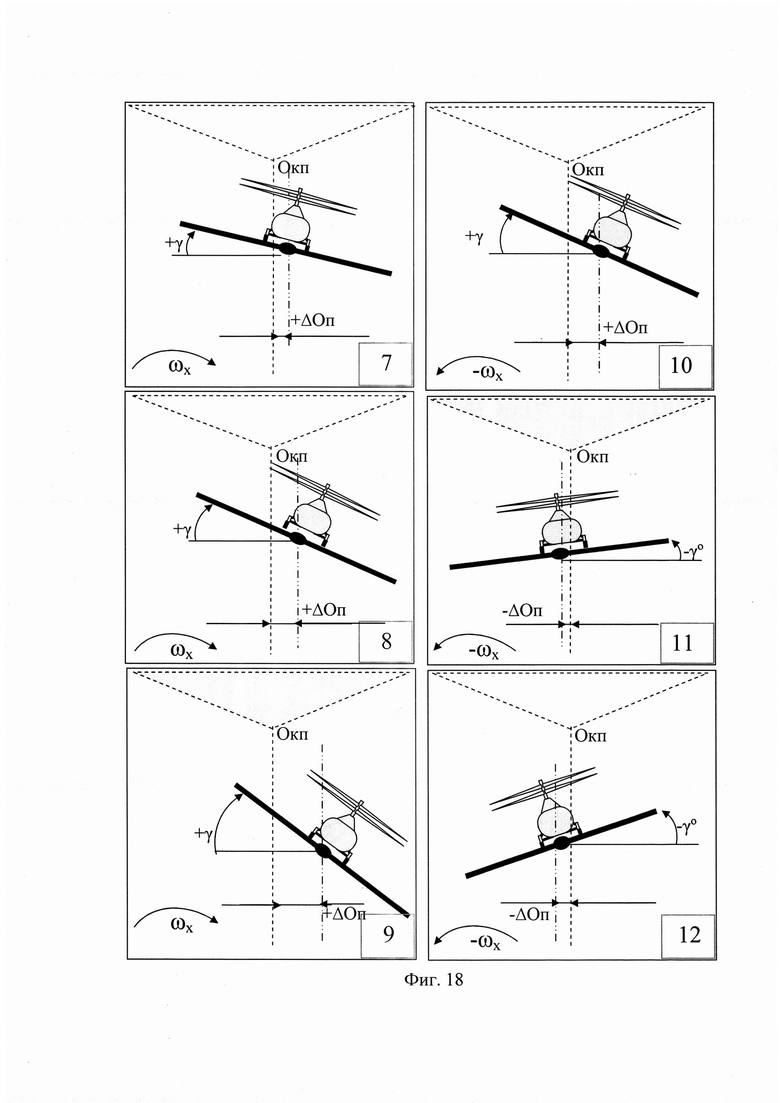
На фигуре 18 представлены фазы нахождения вертолета на качающейся ВППл корабля.
Заявляемое «светотехническое оборудование взлетно-посадочной площадки корабля» состоит из:
- фонарей (фигура 1) подсвета белого цвета (7- слева, 8- справа) на леерных ограждениях левого и правого борта корабля - 1;
- посадочных огней зеленого цвета (6 - по кругу, 1 - в центре) для обозначения посадочного круга, нанесенного на ВППл корабля - 2;
- пограничных огней красного цвета, для обозначения контура ВППл корабля - 3;
- прожекторов подсветки для освещения водной поверхности - 4;
- подсветки ветроуказателя белым цветом - 5;
- заградительных огней синего цвета для обозначения выступающих частей корабля - 6;
- прожекторов подсвета поверхности ВППл корабля, для освещения ближней и дальней площади взлетно-посадочной площадки корабля при посадке и взлете вертолета - 7;
- источника электропитания - 8;
- светотехнического оборудования (СТО) для световой индикации угла крена и угла дифферента ВППл корабля - 9, в которое входит (фигура 2):
- блок гироскопа - 10;
- датчик текущего угла крена ВППл корабля - 11;
- блок опорного напряжения по углу крена - 12;
- блок мультиканального аналого-цифрового преобразователя по углу крена (АЦП γ°)-13;
- блок аппаратно-логического шифратора по углу крена (АЛШ γ°) - 14;
- группа элементов сравнения по углу крена (Эγ°) - 15;
- блок заданного цифрового двоичного кода на срабатывание ламп светотехнического оборудования для угла крена (γ°) - 16;
- световой визуализатор по углу крена (СВК) - 17;
- крестообразный кронштейн -18;
- световой визуализатор по углу дифферента (СВД) - 19;
- группа элементов сравнения по углу дифферента (Эν°) - 20;
- блок аппаратно-логического шифратора по углу дифферента (АЛШ ν°) - 21;
- блок мультиканального аналого-цифрового преобразователя по углу дифферента (АЦП ν°) - 22;
- блок заданного цифрового двоичного кода на срабатывание ламп светотехнического оборудования для угла дифферента (ν°) - 23;
- блок опорного напряжения по углу дифферента - 24;
- датчик текущего угла дифферента ВППл корабля - 25;
- центральная непрерывно светящаяся лампа - 26;
- сигнальные непрерывно светящиеся лампы эталонного отклонения ВППл корабля - 27.
- элементы (фигура 3) сравнения (ЭС) - 28, каждый из которых содержит:
- цифровой компаратор кодов - 29;
- вход для первой сравниваемой величины - 30;
- вход для второй сравниваемой величины -31;
- выход результата сравнения - 32;
- гирлянду ламп - 33.
Параметрическая связь между элементами заявляемого «светотехнического оборудования взлетно-посадочной площадки корабля».
«Светотехническое оборудование взлетно-посадочной площадки корабля» является потребителем электроэнергии, источник которой располагаются на корабле. В прилагаемых к заявляемому изобретению фигурах «светотехнического оборудования взлетно-посадочной площадки корабля» источники электроэнергии не показаны.
Электрическое напряжение бортового источника электропитания подключено к известному светотехническому оборудованию корабля, в состав которого входят: фонари подсвета белого цвета (7 - слева, 8 - справа) на леерных ограждениях левого и правого борта корабля (1); посадочные огни зеленого цвета (6 - по кругу, 1 - в центре), для обозначения посадочного круга нанесенного на ВППл корабля (2); пограничные огни красного цвета для обозначения контура ВППл корабля (3); прожекторы подсветки для освещения водной поверхности (4); подсветка ветроуказателя белым цветом (5); заградительные огни синего цвета для обозначения выступающих частей корабля (6); прожекторы подсвета поверхности ВППл корабля, для освещения ближней и дальней площади взлетно-посадочной площадки корабля при посадке и взлете вертолета (7).
Электрическое напряжение от источника электропитания (8) подключено к светотехническому оборудованию (СТО) для световой индикации угла крена и угла дифферента ВППл корабля (9). В светотехническом оборудовании (СТО) для световой индикации угла крена и угла дифферента ВППл корабля (9) электропитание подключено к блоку гироскопа (10), датчику текущего угла крена ВППл корабля (11); блоку опорного напряжения по углу крена (12); блоку мультиканального аналого-цифрового преобразователя по углу крена (АЦП γ°) (13); блоку аппаратно-логического шифратора по углу крена (АЛШ γ°) (14); группе элементов сравнения по углу крена (Эγ°) (15); блоку заданного цифрового двоичного кода на срабатывание ламп светотехнического оборудования для угла крена (γ°) (16); световому визуализатору по углу крена (СВК) (17); световому визуализатору по углу дифферента (СВД) (19); группе элементов сравнения по углу дифферента (Эν°) (20); блоку аппаратно-логического шифратора по углу дифферента (АЛШ ν°) (21); блоку мультиканального аналого-цифрового преобразователя по углу дифферента (АЦП ν°) (22); блоку заданного цифрового двоичного кода на срабатывание ламп светотехнического оборудования для угла дифферента (ν°) (23); блоку опорного напряжения по углу дифферента (24); датчику текущего угла дифферента ВППл корабля (25); центральной непрерывно светящейся лампе (26) и сигнальным непрерывно светящимся лампам эталонного отклонения ВППл корабля (27).
На фигуре (2) представлена блок-схема светотехнического оборудования корабля для световой индикации угла крена и угла дифферента ВППл корабля (9). Подключение источника электропитания (8) в светотехническом оборудовании корабля для световой индикации угла крена и угла дифферента ВППл корабля (9) не показано.
От блока гироскопа (10) с выхода датчика текущего угла крена ВППл корабля (11) напряжение аналогового сигнала текущего угла крена ВППл корабля (Uтек γ°) подается в блок мультиканального аналого-цифрового преобразователя по углу крена (АЦП γ°) (13). Причем, на вход «А1» блока мультиканального аналого-цифрового преобразователя по углу крена (АЦП γ°) (13) подается положительное напряжение аналогового сигнала текущего угла крена ВППл корабля (+Uтек γ°), а на вход «А2» блока мультиканального аналого-цифрового преобразователя по углу крена (АЦП γ°) (13) подается отрицательное напряжение аналогового сигнала текущего угла крена ВППл корабля (-Uтек γ°). С выхода блока опорного напряжения по углу крена (12) подается постоянное максимальное значение положительного напряжения (+Uoп γ°) аналогового сигнала опорного угла крена ВППл корабля на вход «В1», а постоянное максимальное значение отрицательного напряжения (-Uoп γ°) аналогового сигнала опорного угла крена ВППл корабля подается на вход «В2» блока мультиканального аналого-цифрового преобразователя по углу крена (АЦП γ°) (13). С выхода блока мультиканального аналого-цифрового преобразователя по углу крена (АЦП γ°) (13) цифровой код сигнала текущего угла крена ВППл корабля подается на вход блока аппаратно-логического шифратора по углу крена (АЛШ γ°) (14). С выхода блока аппаратно-логического шифратора по углу крена (АЛШ γ°) (14) на вход «М» цифровых компараторов кодов (29), входящих в состав группы элементов сравнения по углу крена (Эγ°) (15) подается выходной цифровой двоичный код текущего угла крена ВППл корабля. С выхода блока заданного цифрового двоичного кода на срабатывание ламп светотехнического оборудования для угла крена (γ°) (16) на вход «N» цифровых компараторов кодов (29), входящих в состав группы элементов сравнения по углу крена (Эγ°) (15) подается цифровой двоичный код на срабатывание ламп светотехнического оборудования для угла крена (γ°). С выхода результатов сравнения (32) цифровых компараторов кодов (29), входящих в состав группы элементов сравнения по углу крена (Эγ°) (15) подается сигнал на гирлянды ламп (33) светового визуализатора по углу крена (СВК) (17).
От блока гироскопа (10) с выхода датчика текущего угла дифферента ВППл корабля (25) напряжение аналогового сигнала текущего угла дифферента ВППл корабля (Uтек ν°) подается в блок мультиканального аналого-цифрового преобразователя по углу дифферента (АЦП ν°) (22). Причем, на вход (А1) блока мультиканального аналого-цифрового преобразователя по углу дифферента (АЦП ν°) (22) подается положительное напряжение аналогового сигнала текущего угла дифферента ВППл корабля (+Uтек ν°), а на вход «А2» блока мультиканального аналого-цифрового преобразователя по углу дифферента (АЦП ν°) (22) подается отрицательное напряжение аналогового сигнала текущего угла дифферента ВППл корабля (-Uтек ν°). С выхода блока опорного напряжения по углу дифферента (24) одновременно подается постоянное максимальное значение положительного напряжения (+Uoп ν°) аналогового сигнала опорного угла дифферента ВППл корабля на вход «В1», а постоянное максимальное значение отрицательного напряжения (-Uoп ν°) аналогового сигнала опорного угла дифферента ВППл корабля подается на вход «В2» блока мультиканального аналого-цифрового преобразователя по углу дифферента (АЦП ν°) (22). С выхода блока мультиканального аналого-цифрового преобразователя по углу дифферента (АЦП ν°) (22) цифровой код сигнала текущего угла дифферента ВППл корабля подается на вход блока аппаратно-логического шифратора по углу дифферента (АЛШ ν°) (21). С выхода блока аппаратно-логического шифратора по углу дифферента (АЛШ ν°) (21) на вход «М» цифровых компараторов кодов (29), входящих в состав группы элементов сравнения по углу дифферента (Эν°) (20) подается выходной цифровой двоичный код текущего угла дифферента ВППл корабля. С выхода блока заданного цифрового двоичного кода на срабатывание ламп светотехнического оборудования для угла дифферента (ν°) (23) на вход «N» цифровых компараторов кодов (29), входящих в состав группы элементов сравнения по углу дифферента (Эν°) (20) подается цифровой двоичный код на срабатывание ламп светотехнического оборудования для угла дифферента (ν°). С выхода результатов сравнения (32) цифровых компараторов кодов (29), входящих в состав группы элементов сравнения по углу дифферента (Эν°) (20) подается сигнал на гирлянды ламп (33) светового визуализатора по углу дифферента (СВД) (19).
Центральная непрерывно светящаяся лампа (26) и сигнальные непрерывно светящиеся лампы эталонного отклонения ВППл корабля (27) подключаются к источнику электропитания и работают постоянно.
Работа заявляемого «светотехнического оборудования взлетно-посадочной площадки корабля» начинается с того, что
Перед выполнением полетов с авианесущих кораблей известное светотехническое оборудование корабля подключается к бортовому источнику электропитания корабля. Электрическое напряжение от бортового источника электропитания корабля подается к фонарям подсвета белого цвета (7 - слева, 8 - справа), которые крепятся на леерных ограждениях левого и правого борта корабля (1); посадочным огням зеленого цвета (6 - по кругу, 1 - в центре) предназначенным для обозначения посадочного круга, нанесенного на ВППл корабля (2); пограничным огням красного цвета, предназначенным для обозначения контура ВППл (3); прожекторам подсветки для освещения водной поверхности (4); подсветке ветроуказателя белым цветом (5); заградительным огням синего цвета для обозначения выступающих частей корабля (6); прожекторам подсвета поверхности ВППл, предназначенным для освещения ближней и дальней площади взлетно-посадочной площадки корабля при посадке и взлете вертолета (7). Таким образом, обозначено все пространство ВППл корабля, позволяющее летчику, при полете по глиссаде в точку зависания над ВППл корабля, визуально ориентироваться на корабль и видеть ВППл корабля.
Дополнительно на ВППл корабля закрепляется заявляемое светотехническое оборудование корабля для световой индикации угла крена и угла дифферента ВППл корабля (СТО) (9) и оно подключается к источнику электропитания, это может быть аккумуляторная батарея или электрогенератор.
Готовность светотехнического оборудования корабля для световой индикации угла крена и угла дифферента ВППл корабля (СТО) (9) зависит от типа выбранного гироскопа. Для лазерного гироскопа готовность к работе не более 1÷2 секунды.
Центральная непрерывно светящаяся лампа (26), сигнальные непрерывно светящиеся лампы эталонного отклонения ВППл корабля (27) светотехнического оборудования (СТО 9) подключены к источнику электропитания (8) и работают постоянно.
Светотехническое оборудование корабля для световой индикации угла крена и угла дифферента ВППл корабля (СТО) (9) устанавливается на ВППл корабля в любом месте ВППл, но так, чтобы летчик видел центральную непрерывно светящуюся лампу (26), сигнальные непрерывно светящиеся лампы эталонного отклонения ВППл корабля (27), световой визуализатор по углу крена (СВК) (17) и световой визуализатор по углу дифферента (СВД) (19).
Крестообразный кронштейн (18) в котором располагается светотехническое оборудование корабля для световой индикации угла крена и угла дифферента ВППл корабля (СТО) (9) ориентируется на ВППл корабля так, чтобы ложемент светового визуализатора по углу крена (СВК) (17) располагался перпендикулярно продольной оси корабля, а ложемент светового визуализатора по углу дифферента (СВД) (19) располагался параллельно продольной оси корабля.
Световой визуализатор по углу крена (СВК) (17), представленный группой элементов сравнения по углу крена (Эγ°) (15), визуализирует положительное и отрицательное значение угла крена. Световая визуализация положительного угла крена крестообразного кронштейна (18) ориентируется на правый борт корабля.
Световой визуализатор по углу дифферента (СВД) (19), представленный группой элементов сравнения по углу дифферента (Эν°) (20), визуализирует положительное и отрицательное значение угла дифферента. Световая визуализация положительного угла дифферента крестообразного кронштейна (18) ориентируется на корму корабля.
Летчик, в полете на глиссаде и над центром качающейся ВППл корабля, видит световые визуализаторы, расположенные в ложементах крестообразного кронштейна (18), высвечивающие изменяющееся пространственное угловое положение ВППл корабля по углу крена и по углу дифферента.
При расчете световой индикации, «светотехнического оборудования взлетно-посадочной площадки корабля», использовалась земная система координат OXgYgZg (фигура 4), относительно которой вычислялось пространственное и угловое отклонение корабельной системы координат OкXкYкZк и системой координат связанной с ВППл корабля OпXпYпZп.
Земная система (фигура 4) координат(ОХgУgZg) с центром в точке (О). Ось (OYg) - направлена вверх (вертикаль), ось (OXg) - ориентирована в заданном направлении (условно на север), перпендикулярна оси (OYg), ось (OZg) перпендикулярна плоскости (YgOXg) и образует правую систему координат.
Корабельная система (фигура 4) координат (OкXкYкZк). Центр системы координат (Ок) расположен в центре масс корабля. Ось (ОкХк) - направлена вдоль продольной оси корабля, ось(ОкУк) - направлена вверх перпендикулярно оси (ОкХк) и располагается в продольной плоскости симметрии корабля, ось (OкZк) перпендикулярна оси (ОкХк) и образует правую систему координат.
Земная система координат (OXgYgZg) и корабельная система координат (OкXкYкZк) связаны (фигура 4) углом крена корабля (γк°), углом дифферента корабля (νк°) и углом рыскания корабля (ϕк°).
Система координат (фигура 4) связанная с ВППл корабля (OпXпYпZп). Центр системы координат (Оп) расположен в центре ВППл корабля. Ось (ОпХп) - расположена на линии пересечения плоскости ВППл корабля и плоскости продольной симметрии корабля, направление совпадает с направлением продольной оси корабля (ОкХк). Ось(ОпУп) - направлена вверх (вертикаль) перпендикулярно плоскости ВППл корабля и перпендикулярна оси (ОпХп) и располагается в продольной плоскости симметрии корабля. Ось (OпZп) перпендикулярна оси (ОпХп) и образует правую систему координат.
Относительно корабельной системы координат (ОкХкYкZк) пространственное положение системы координат связанной с ВППл корабля (OпXпYпZп) определяется (фигура 5) расстоянием от центра масс корабля (Ок) до центра ВППл корабля (ΔХп - вдоль продольной оси (Хк), (ΔYп - вдоль вертикальной оси (Yк), (ΔZп - вдоль оси (Zк). На фигуре 5 представлено взаимное пространственное положение корабельной системы координат (OXкYкZк) и системы координат связанной с ВППл корабля (OпXпYпZп). Знаками Ωxп, Ωуп и Ωzп обозначены угловые скорости изменения угла крена (γк°), угла дифферента (νк°) и угла рыскания корабля (ϕк°).
Световая индикация «светотехнического оборудования взлетно-посадочной площадки корабля» вычисляется по текущим значениям угла крена корабля (γк°), угла дифферента корабля (νк°) и угла рыскания корабля (ϕк°), по значениям которых строится матрица перехода от земной системы координат (OXgYgZg) к корабельной системе координат (OкXкYкZк) и вычисляются параметры перехода от земной системы координат к системе координат связанной с ВППл корабля (OпXпYпZп) путем пересчета пространственного смещение центра ВППл корабля (ΔХп, ΔYп, ΔZп) относительно центра корабельной системы координат (OкXкYкZк).
На фигуре (6) представлена схема измерения углового положения ВППл корабля с помощью блока гироскопа (10). На фигуре (6) видно, что ВППл корабля отклонилось от линии горизонта на положительный угол крена (+γ°) измеряемый от оси OYg - вертикали земной системы координат до оси OпYп - вертикали системы координат связанной с ВППл корабля. На фигуре (6) ползунок (Q) потенциометра (R) датчика текущего угла крена ВППл корабля (11) в блоке гироскопа (10) переместился в положение, соответствующее положительному направлению угла крена ВППл корабля относительно точки отсчета нулевого напряжения (Р), которая соответствует горизонтальному положению ВППл корабля и, к которой подсоединен нулевой потенциал (W). К концам потенциометра (R) датчика текущего угла крена ВППл корабля (11) в блоке гироскопа (10) приложено напряжение соответствующее знаку углового положения ВППл корабля: (минус (-)) - отрицательный угол крена ВППл корабля и (плюс (+)) - положительный угол крена ВППл корабля. В данном примере на фигуре (6) с потенциометра (R) датчика текущего угла крена ВППл корабля (11) блока гироскопа (10) снимается положительное напряжение аналогового сигнала величиной (+Uтек γ°). По такому же принципу с потенциометра датчика текущего угла дифферента ВППл корабля (25) блока гироскопа (10) снимается напряжение аналогового сигнала текущего угла дифферента ВППл корабля (±Uтек ν°).
Напряжение аналогового сигнала текущего угла крена ВППл корабля (±Uтек γ°) и напряжение аналогового сигнала текущего угла дифферента ВППл корабля (±Uтек ν°) увеличивается с увеличением, соответственно, угла крена и угла дифферента ВППл корабля. Если ползунок (Q) потенциометра (R) в датчике текущего угла крена ВППл корабля (11) и ползунок (Q) потенциометра (R) в датчике текущего угла дифферента ВППл корабля (25) блока гироскопа (10) одновременно находятся в нулевой точке отсчета (Р), то напряжение аналогового сигнала текущего угла крена ВППл корабля (Uтек γ°=0) и напряжение аналогового сигнала текущего угла дифферента ВППл корабля (Uтек ν°=0) - равно нулю, что соответствует горизонтальному положению ВППл корабля.
На фигуре (7) изображена блок-схема электрического подключения к световому визуализатору по углу крена (СВК) (17)) на входы «А1, А2», «В1, В2», (Лγ°1) и (Лγ°2). С выхода датчика текущего угла крена ВППл корабля (11) в блоке гироскопа (10) на вход «А1» блока мультиканального аналого-цифрового преобразователя по углу крена (13) подается положительное напряжение аналогового сигнала текущего угла крена ВППл корабля (+Uтек γ°), на вход «А2» блока мультиканального аналого-цифрового преобразователя по углу крена (13) подается отрицательное напряжение аналогового сигнала текущего угла крена ВППл корабля (-Uтек γ°). С выхода блока опорного напряжения по углу крена (12) на вход «В1» блока мультиканального аналого-цифрового преобразователя по углу крена (13) подается постоянное максимальное значение положительного напряжения (+Uoп γ°) аналогового сигнала опорного угла крена ВППл корабля, на вход «В2» блока мультиканального аналого-цифрового преобразования по углу крена (13) подается постоянное максимальное значение отрицательного напряжения (-Uoп γ°) аналогового сигнала опорного угла крена ВППл корабля. К входу (Лγ°1) подключаются сигнальные непрерывно светящиеся лампы эталонного отклонения ВППл корабля (27) на положительный угол крена '3°', '6°', '10°' градусов. К входу (Лγ°2) подключаются сигнальные непрерывно светящиеся лампы эталонного отклонения ВППл корабля (27) на отрицательный угол крена '-3°', '-6°', '-10°' градусов.
На фигуре (8) изображена блок-схема электрического подключения к световому визуализатору по углу дифферента (СВД) (19) на входы «А1, А2», «В1, В2», (Лγ°1) и (Лγ°2). С выхода датчика текущего угла дифферента ВППл корабля (25) в блоке гироскопа (10) на вход «А1» блока мультиканального аналого-цифрового преобразователя по углу дифферента (22) подается положительное напряжение аналогового сигнала текущего угла дифферента ВППл корабля (+Uтек ν°), на вход «А2» блока мультиканального аналого-цифрового преобразователя по углу дифферента (22) подается отрицательное напряжение аналогового сигнала текущего угла дифферента ВППл корабля (-Uтек ν°). С выхода блока опорного напряжения по углу дифферента (24) на вход «В1» блока мультиканального аналого-цифрового преобразователя по углу дифферента (22) подается постоянное максимальное значение положительного напряжения (+Uoп ν°) аналогового сигнала опорного угла дифферента ВППл корабля, на вход «В2» блока мультиканального аналого-цифрового преобразователя по углу дифгоферента (22) подается постоянное максимальное значение отрицательное напряжения (-Uoп ν°) аналогового сигнала опорного угла дифферента ВППл корабля. К входу (Лν°1) подключаются сигнальные непрерывно светящиеся лампы эталонного отклонения ВППл корабля (27) на положительный угол дифферента '3°', '6°', '10°' градусов. К входу (JIν°2) подключаются сигнальные непрерывно светящиеся лампы эталонного отклонения ВППл корабля (27) на отрицательный угол дифферента '-3°', '-6°', '-10°' градусов.
Применяемые в светотехническом оборудовании корабля (СТО) 9 (фигура 2) световой визуализатор по углу крена (СВК) (17) и световой визуализатора по углу дифферента (СВД) (19) работают по одному алгоритму, поэтому рассмотрим их работу на примере работы алгоритма светового визуа-лизатора по углу крена (СВК) (17).
В блок (фигура 2) мультиканального аналого-цифрового преобразователя по углу крена (АЦП γ°) (13) подается с выхода датчика текущего угла крена ВППл корабля (11) блока гироскопа (10) напряжение аналогового сигнала текущего угла крена ВППл корабля (Uтек γ°).
При качании ВППл корабля изменяется не только величина угла крена ВППл корабля, но и знак величины угла крена ВППл корабля, следовательно, и напряжение аналогового сигнала текущего угла крена ВППл корабля (Uтек γ°), поступающее с выхода датчика текущего угла крена ВППл корабля (11) блока гироскопа (10) имеет величину и знак.
Напряжение аналогового сигнала текущего угла крена ВППл корабля (Uтек γ°) подается на вход «А1» и вход «А2» блока мультиканального аналого-цифрового преобразователя по углу крена (АЦП γ°) (13). На вход «А1» подается положительное напряжение аналогового сигнала текущего угла крена ВППл корабля (+Uтек γ°), а на вход «А2» подается отрицательное напряжение аналогового сигнала текущего угла крена ВППл корабля (-Uтек γ°).
Положительному углу крена ВППл корабля соответствует положительный знак напряжение аналогового сигнала текущего угла крена ВППл корабля (+Uтек γ°) при этом значение напряжение аналогового сигнала текущего угла крена ВППл корабля соответствующее отрицательному углу крена ВППл корабля (-Uтек γ°=0) - равно нулю. И наоборот, отрицательному углу крена ВППл корабля соответствует отрицательный знак напряжения аналогового сигнала текущего угла крена ВППл корабля (-Uтек γ°) при этом значение напряжение аналогового сигнала текущего угла крена ВППл корабля соответствующее положительному углу крена ВППл корабля (+Uтек γ°=0) -равно нулю.
Электрическая схема разложения электрического синусоидального напряжении аналогового сигнала текущего угла крена ВППл корабля на напряжение положительного сигнала и напряжение отрицательного сигнала известна и поэтому авторы не заявляют в данной заявке эту электрическую схему, считая ее известной и работоспособной.
В блок (фигура 2) мультиканального аналого-цифрового преобразователя по углу крена (АЦП γ°) (13) с выхода блока опорного напряжения по углу крена (12) на вход «В1» подается постоянное максимальное значение положительного напряжения (+Uoп γ°) аналогового сигнала опорного угла крена ВППл корабля, а на вход «В2» подается постоянное максимальное значение отрицательного напряжения (-Uoп γ°) аналогового сигнала опорного угла крена ВППл корабля.
В блоке мультиканального аналого-цифрового преобразователя по углу крена (АЦП γ°) (13) диапазон входного напряжения аналогового сигнала опорного угла крена ВППл корабля от максимально положительного до максимально отрицательного разбивается (квантование) на дискретные уровни изменения угла крена ВППл корабля. Каждому дискретному уровню изменения угла крена ВППл корабля соответствует одно цифровое значение.
Напряжение аналогового сигнала текущего угла крена ВППл корабля (Uтек γ°) соотносится дискретному уровню изменения угла крена ВППл корабля, что соответствует цифровому значению напряжения аналогового сигнала.
Таким образом, текущее напряжение аналогового сигнала текущего угла крена ВППл корабля (Uтек γ°) в блоке мультиканального аналого-цифрового преобразователя по углу крена (АЦП γ°) (13) преобразуется в последовательность цифровых значений - цифровой код текущего угла крена ВППл корабля. С выхода блока мультиканального аналого-цифрового преобразователя по углу крена (АЦП γ°) (13) цифровой код текущего угла крена ВППл корабля подается на вход аппаратно-логического шифратора по углу крена (АЛШ γ°) (14), в котором цифровой код текущего угла крена ВППл корабля генерируется в выходной цифровой двоичный код текущего угла крена ВППл корабля.
С выхода (фигура 9) аппаратно-логического шифратора по углу крена (АЛШ γ°) (14) выходной цифровой двоичный код текущего угла крена ВППл корабля подается на первый вход «М» группы элементов сравнения по углу крена (Эγ°) (15). В группе элементов сравнения по углу крена (Эγ°) (15) каждый элемент сравнения (ЭС) (28) работает в своем дискретном уровне изменения угла крена ВППл корабля со своим на входе «М» выходным цифровым двоичным кодом текущего угла крена ВППл корабля. Каждый элемент сравнения (ЭС) (28) работает независимо от другого элемента сравнения и содержит цифровой компаратор кодов (29) и гирлянду ламп (33).
Как показано на фигуре (9), выходной цифровой двоичный код текущего угла крена ВППл корабля, поступающий на первый вход «М», условно показан последовательностью «0-0-0-1-…-1-1» (ноль-единица). На элементы сравнения (ЭС) (28), работающие в дискретном уровне изменения угла крена ВППл корабля от одного градуса (1°) до семи градусов (7°), поступает фигура (9) выходной цифровой двоичный код текущего угла крена ВППл корабля равный единице «1». На элементы сравнения (ЭС) (28), работающие в дискретном уровне изменения угла крена ВППл корабля от восьми градусов (8°) до десяти градусов (10°), поступает фигура (9) выходной цифровой двоичный код текущего угла крена ВППл корабля равный нулю «0».
На второй вход «N» группы элементов сравнения по углу крена (Эγ°) (15) подается с выхода блока заданного цифрового двоичного кода на срабатывание ламп светотехнического оборудования для угла крена (γ°) (16) цифровой двоичный код, равный коду срабатывания гирлянды ламп (33) для угла крена. Код условно обозначен на фигуре (9) последовательностью «1-1-1- 1-…-1-1» (единица-единица) для всех дискретных уровней изменения угла крена ВППл корабля от 1° до 10° текущего угла крена ВППл корабля.
В каждом элементе сравнения (ЭС) (28) цифровой компаратор кодов (29) сравнивает значение выходного сигнала цифрового двоичного кода текущего угла крена ВППл корабля поданного на первый вход «М» со значением цифрового двоичного кода, равного коду срабатывания гирлянды ламп (33) для угла крена поданного на второй вход «N».
Если удовлетворяется условие, при котором значение выходного сигнала цифрового двоичного кода текущего угла крена ВППл корабля больше или равно значению цифрового двоичного кода, равного коду срабатывания гирлянды ламп (33) для угла крена, то на выходе (32) цифрового компаратора кодов (29) для данного дискретного уровня изменения угла крена ВППл корабля, выдается признак на срабатывание гирлянды ламп (33) элемента сравнения (ЭС) (28). Гирлянда ламп (33) элемента сравнения (ЭС) (28) загорается.
Гирлянды лампы (33) элементов сравнения (ЭС) (28), светового визуализатора по углу крена (СВК) (17) загораются, высвечивая летчику световую полосу от центральной, непрерывно светящейся лампы (26), до гирлянды ламп (33) элемента сравнения (ЭС) (28), который не выдает признак на срабатывание своей гирлянды ламп (33). Таким образом, световая полоса визуализирует летчику величина текущего угла крена качающейся ВППл корабля.
На фигуре (9) графически представлен положительный угол крена качающейся ВППл корабля равный семи градусам (γ°=+7°).
Сигнальные непрерывно светящие лампы эталонного углового отклонения ВППл корабля (27) высвечивают равные значения положительных и отрицательных углов крена и углов дифферента: '+10°', '+6°', '+3°' и '-3°', '-6°', '-10°' градусов.
Свечение непрерывно светящейся лампы (26) и свечение сигнальных непрерывно светящихся ламп эталонного углового отклонения ВППл корабля (27), при погашенных гирляндах ламп (33) элементов сравнения (ЭС) (28) светового визуализатора по углу крена (СВК) (17) и погашенных гирляндах ламп (33) элементов сравнения (ЭС) (28) светового визуализатора по углу дифферента (СВД) (19), означают для летчика нулевое значение угла отклонения ВППл корабля по углу крена (γ°=0°) и по углу дифферента (ν°=0°).
На фигуре (10) представлена схема сборки светотехнического оборудования корабля для световой индикации угла крена и угла дифферента ВППл корабля (СТО) (9) в крестообразный кронштейн (18).
«Светотехническое оборудование корабля для световой индикации угла крена и угла дифферента ВППл корабля (СТО) (9)» конструктивно собирается относительно двух равных по длине, взаимно перпендикулярных и пересекающихся в центре линий. Первая линия ориентируется параллельно продольной оси корабля, вторая линия ориентируется перпендикулярно первой линии и параллельно плоскости ВППл корабля.
Вдоль первой линии располагается ложемент положительного угла дифферента и ложемент отрицательного угла дифферента. Относительно центра пересечения линий, ложемент положительного угла дифферента ориентируется на корму корабля, а ложемент отрицательного угла дифферента ориентируется на нос корабля. В ложементы, конструктивно ориентированные вдоль продольной линии корабля, укладывается группа элементов сравнения (Эν°) - это световой визуализатор по углу дифферента (СВД) (19).
Вдоль второй линии располагается ложемент положительного угла крена и ложемент отрицательного угла крена. Относительно центра пересечения линий, ложемент положительного угла крена ориентируется на правый борт корабля, а ложемент отрицательного угла крена ориентируется на левый борт корабля. В ложементы, конструктивно ориентированные поперек продольной линии корабля, укладывается группа элементов сравнения (Эγ°) -это световой визуализатор по углу крена (СВК) (17).
Ложементы собираются в кронштейн плоской крестообразной конструкции, образованной четырьмя равными по длине и взаимно-перпендикулярными ложементами.
Центр соединения ложементов конструктивно позволяет расположить центральную непрерывно светящуюся лампу (26).
К кронштейну крепятся сигнальные непрерывно светящиеся лампы эталонного углового отклонения ВППл корабля (27), блок гироскопа (10) и источник электропитания (8).
В сложных метеоусловиях летчик любой квалификации видит крестообразный кронштейн (18) светотехнического оборудования корабля для световой индикации угла крена и угла дифферента ВППл корабля (СТО)(9), световые дорожки, образованные гирляндами ламп (33) элементов сравнения (ЭС) (28), которые визуализируют пространственное угловое положение ВППл корабля относительно горизонтальной плоскости.
Пространственный образ углового положения ВППл корабля исключает иллюзию пространственного положения вертолета относительно ВППл корабля.
На фигуре (11) летчик видит крестообразный кронштейн (18) светотехнического оборудования корабля для световой индикации угла крена и угла дифферента ВППл корабля (СТО) (9) световую дорожку в ложементе отрицательного угла крена ориентированного на левый борт корабля и в ложементе отрицательного угла дифферента ориентированного на нос корабля. Летчик одним взглядом представляет пространственное положение ВППл корабля - отрицательный угол крена и отрицательный угол дифферента ВППл корабля. Крупным планом вынесено светотехническое оборудование, ориентированное вдоль продольной оси корабля.
На фигуре (12) световые дорожки, образованные гирляндами ламп (33) элементов сравнения (ЭС) (28) в ложементе отрицательного угла крена ориентированного на левый борт корабля и в ложементе положительного угла дифферента ориентированного на корму корабля, визуализируют отрицательный угол крена и положительный угол дифферента ВППл корабля. Крупным планом вынесено светотехническое оборудование, ориентированное вдоль продольной оси корабля.
На фигуре (13) световые дорожки, образованные гирляндами ламп (33) элементов сравнения (ЭС) (28) в ложементе положительного угла крена ориентированного на правый борт корабля и в ложементе отрицательного угла дифферента ориентированного на нос корабля, визуализируют положительный угол крена и отрицательный угол дифферента ВППл корабля. Крупным планом вынесено светотехническое оборудование, ориентированное вдоль продольной оси корабля.
На фигуре (14) световые дорожки, образованные гирляндами ламп (33) элементов сравнения (ЭС) (28) в ложементе положительного угла крена ориентированного на правый борт корабля и в ложементе положительного угла дифферента ориентированного на корму корабля, визуализируют положи тельный угол крена и положи тельный угол дифферента ВППл корабля. Крупным планом вынесено светотехническое оборудование, ориентированное вдоль продольной оси корабля.
На фигуре (15) представлена схема взаимного положения земной системы координат (OXgYgZg) с центром в точке (О), корабельной системы координат (OкXкYкZк) с центром в точке (Ок), системы координат связанной с ВППл корабля (OпXпYпZп) с центром (Оп) и стилизованное изображение корабля при нулевом угле крена и дифферента. На фигуре 15 видна глиссада, по которой вертолет заходит в точку зависания (Окп). Угол глиссады постоянный и летчик может заходить на посадку с любого направления. Следовательно, траектория полета будет проходить по геометрической фигуре симметричной относительно вертикальной оси (OYg). Эту геометрическую фигуру можно назвать «Конус посадки». Вершина конуса посадки находится в точке зависания (Окп) над центром ВППл корабля. Высота точки зависания в земной системе координат, отсчитываемой от точки (О), над центром ВППл корабля равна (Нтз).
На фигуре (16) представлена схема взаимного положения земной системы координат (OXgYgZg) с центром в точке (О), корабельной системы координат (OкXкYкZк) с центром в точке (Ок), системы координат связанной с ВППл корабля (OпXпYпZп) с центром (Оп) и корабля, когда его угловое и пространственное положение изменилось. Изменилось положение центра ВППл корабля в земной системе координат (OXgYgZg), но пространственное и угловое положение линии глиссады и высота точки зависания (Окп) вертолета над центром ВППл корабля равная (Нтз) в земной системе координат (OXgYgZg) не изменились.
Отклонение центра качающейся ВППл корабля в земной системе координат определяется расстоянием (ΔОп) от вертикальной оси (OYg) земной системы координат (OXgYgZg) до вертикальной оси, проведенной из центра ВППл корабля (Оп).
На фигуре (17) представлены фазы посадки вертолета на качающуюся ВППл корабля при отрицательной угловой скорости (ωх<0) из вершины «Конуса посадки» - точки зависания (Окп) над центром ВППл корабля.
На фигуре (17) фаза (1) - летчик вывел вертолет над центром качающейся ВППл корабля в вершину «Конуса посадки» - точку зависания (Окп).
На фигуре (17) фаза (2) - летчик наблюдает за изменением световых дорожек в ложементах светотехнического оборудования и удерживает вертолет над центром ВППл корабля. Крен ВППл корабля увеличивается. Отрицательное отклонение центра качающейся ВППл корабля (ΔОп) увеличивается.
На фигуре (17) фаза (3) - летчик снижается на ВППл корабля, наблюдает за изменением световых дорожек в ложементах светотехнического оборудования и удерживает вертолет над центром ВППл корабля. Крен ВППл корабля увеличивается. Отрицательное отклонение центра качающейся ВППл корабля (ΔОп) увеличивается.
На фигуре (17) фаза (4) -. Отрицательный крен ВППл корабля увеличивается. Летчик касается одной стойкой шасси ВППл корабля.
На фигуре (17) фаза (5) - Угловая скорость (ωх>0) ВППл корабля положительная. Отрицательный крен ВППл корабля уменьшается. Отрицательное отклонение центра качающейся ВППл корабля (АОп) уменьшается.
На фигуре (17) фаза (6) - .Крен ВППл корабля положительный. Отклонение центра качающейся ВППл корабля (ΔОп) близко к нулю. Вертолет касается всеми стойками шасси ВППл корабля.
На фигуре (18) фаза (1÷2) - .Крен ВППл корабля - переменный. Отклонение центра качающейся ВППл корабля (ΔОп) - переменно. Угловая скорость (ωх) корабля - переменная. Вертолет касается ВППл корабля всеми стойками шасси. Вертолет всей массой опирается стойками шасси на ВППл корабля.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2020 |
|
RU2778716C2 |
| Командно-пилотажный индикатор вертолета | 2021 |
|
RU2778955C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2018 |
|
RU2711196C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2013 |
|
RU2539708C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2011 |
|
RU2474862C1 |
| СПОСОБ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ О ВЕРТИКАЛЬНОМ ПЕРЕМЕЩЕНИИ КОРАБЕЛЬНОЙ ВЗЛЕТНО-ПОСАДОЧНОЙ ПЛОЩАДКИ ПРИ ПОСАДКЕ ВЕРТОЛЕТА НА КОРАБЛЬ | 2012 |
|
RU2506654C2 |
| Система"Автоматический световой указатель положения палубы при качке" | 2018 |
|
RU2695029C1 |
| Система посадки летательного аппарата на корабль с применением цифровых технологий | 2020 |
|
RU2734173C1 |
| Способ обеспечения летчика визуальной информацией в условиях отсутствия видимости морской поверхности в ночное время | 2023 |
|
RU2822752C1 |
Светотехническое оборудование взлетно-посадочной площадки (ВППл) корабля содержит фонари подсвета на леерных ограждениях левого и правого бортов корабля, посадочные огни для обозначения посадочного круга, нанесенного на ВППл корабля, пограничные огни для обозначения контура ВППл корабля, прожекторы подсветки для освещения водной поверхности, подсветку ветроуказателя, заградительные огни для обозначения выступающих частей корабля, прожекторы подсвета поверхности ВППл корабля, светотехническое оборудование для отображения углового положения качающейся плоскости ВППл корабля по углу крена и углу дифферента. Обеспечивается безопасность полета вертолета при взлете, висении и посадке на качающуюся ВППл корабля в сложных метеорологических условиях. 18 ил.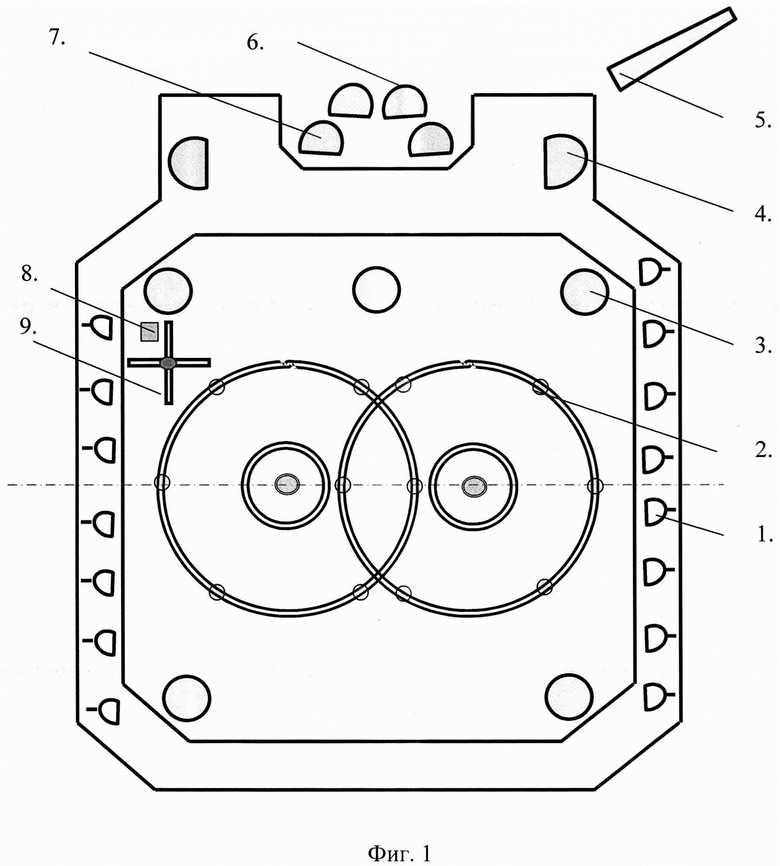
Светотехническое оборудование ВППл корабля, содержащее: фонари подсвета на леерных ограждениях левого и правого бортов корабля, посадочные огни для обозначения посадочного круга, нанесенного на ВППл корабля, пограничные огни для обозначения контура ВППл корабля, прожекторы подсветки для освещения водной поверхности, подсветку ветроуказателя, заградительные огни для обозначения выступающих частей корабля, прожекторы подсвета поверхности ВППл корабля для освещения ближней и дальней площадей взлетно-посадочной площадки корабля при посадке и взлете вертолета, отличающееся тем, что дополнено светотехническим оборудованием, визуализирующим летчику световыми сигналами угловое положение качающейся плоскости ВППл корабля по углу крена и углу дифферента, содержащим: источник электропитания, светотехническое оборудование для световой индикации угла крена и угла дифферента взлетно-посадочной площадки корабля, которое содержит блок гироскопа, датчик текущего угла крена ВППл корабля и датчик текущего угла дифферента ВППл корабля, блок опорного напряжения по углу крена и блок опорного напряжения по углу дифферента, блок мультиканального аналого-цифрового преобразователя по углу крена и блок мультиканального аналого-цифрового преобразователя по углу дифферента, блок аппаратно-логического шифратора по углу крена и блок аппаратно-логического шифратора по углу дифферента, группу элементов сравнения по углу крена, блок заданного цифрового двоичного кода на срабатывание ламп светотехнического оборудования для угла крена, группу элементов сравнения по углу дифферента, блок заданного цифрового двоичного кода на срабатывание ламп светотехнического оборудования для угла дифферента, центральную непрерывно светящуюся лампу, сигнальные непрерывно светящиеся лампы эталонного отклонения взлетно-посадочной площадки корабля, световой визуализатор по углу крена, крестообразный кронштейн, световой визуализатор по углу дифферента, элемент сравнения, каждый из которых содержит: цифровой компаратор кодов, вход для первой сравниваемой величины, вход для второй сравниваемой величины, выход результата сравнения, гирлянду ламп, причем первый выход блока гироскопа с датчика текущего угла крена ВППл корабля соединен по параметру положительного напряжения аналогового сигнала текущего угла крена ВППл корабля с первым входом блока мультиканального аналого-цифрового преобразователя по углу крена, а второй выход блока гироскопа с датчика текущего угла крена ВППл корабля по параметру отрицательного напряжения аналогового сигнала текущего угла крена ВППл корабля соединен со вторым входом блока мультиканального аналого-цифрового преобразователя по углу крена, первый выход блока опорного напряжения по углу крена по параметру постоянного максимального значения положительного напряжения аналогового сигнала опорного угла крена ВППл корабля соединен с третьим входом, а второй выход блока опорного напряжения по углу крена по параметру постоянного максимального значения отрицательного напряжения аналогового сигнала опорного угла крена ВППл корабля соединен с четвертым входом блока мультиканального аналого-цифрового преобразователя по углу крена, выход блока мультиканального аналого-цифрового преобразователя по углу крена по параметру аналогового сигнала текущего угла крена ВППл корабля, преобразованного в цифровой сигнал по углу крена, соединен с входом блока аппаратно-логического шифратора по углу крена, в котором цифровой сигнал по углу крена шифруется в цифровой двоичный код и передается на первый вход группы элементов сравнения по углу крена, второй вход группы элементов сравнения по углу крена связан с выходом блока заданного цифрового двоичного кода на срабатывание ламп светотехнического оборудования для угла крена по параметрам заданного цифрового двоичного кода на срабатывание ламп светотехнического оборудования для угла крена, выход группы элементов сравнения по углу крена связан параметром сигнала результатов сравнения с входом гирлянды ламп светового визуализатора по углу крена, которые уложены в крестообразный кронштейн вдоль стороны, перпендикулярной к продольной оси корабля, первый выход блока гироскопа с датчика текущего угла дифферента ВППл корабля соединен по параметру положительного напряжения аналогового сигнала текущего угла дифферента ВППл корабля с первым входом блока мультиканального аналого-цифрового преобразователя по углу дифферента, а второй выход блока гироскопа с датчика текущего угла дифферента ВППл корабля по параметру отрицательного напряжения аналогового сигнала текущего угла крена ВППл корабля соединен со вторым входом блока мультиканального аналого-цифрового преобразователя по углу дифферента, первый выход блока опорного напряжения по углу дифферента по параметру постоянного максимального значения положительного напряжения аналогового сигнала опорного угла дифферента ВППл корабля соединен с третьим входом, а второй выход блока опорного напряжения по углу дифферента по параметру постоянного максимального значения отрицательного напряжения аналогового сигнала опорного угла дифферента ВППл корабля соединен с четвертым входом блока мультиканального аналого-цифрового преобразователя по углу дифферента, выход блока мультиканального аналого-цифрового преобразователя по углу дифферента по параметру аналогового сигнала текущего угла дифферента ВППл корабля, преобразованного в цифровой сигнал по углу дифферента, связан с входом аппаратно-логического шифратора по углу дифферента, в котором цифровой сигнал по углу дифферента шифруется в цифровой двоичный код и передается на первый вход группы элементов сравнения по углу дифферента, второй вход группы элементов сравнения по углу дифферента связан с выходом блока заданного цифрового двоичного кода на срабатывание ламп светотехнического оборудования для угла дифферента по параметрам заданного цифрового двоичного кода на срабатывание ламп светотехнического оборудования для угла дифферента, выход группы элементов сравнения по углу дифферента связан параметром сигнала результатов сравнения с входом гирлянды ламп светового визуализатора по углу дифферента, которые уложены в крестообразный кронштейн вдоль стороны, параллельной продольной оси корабля, в центре крестообразного кронштейна располагается центральная непрерывно светящаяся лампа, а вдоль сторон крестообразного кронштейна, в которых уложены гирлянды ламп световых визуализаторов, крепятся сигнальные непрерывно светящиеся лампы.
| Ю.А.Тяпченко, Л.В | |||
| Гаршин | |||
| Средства и методы обеспечения визуальной посадки вертолетов на палубы морских судов | |||
| Материалы II межрегиональной научно-практической конференции "Прикладная психология как ресурс социально-экономического развития России в условиях преодоления глобального кризиса", книга 2, стр | |||
| Облицовка комнатных печей | 1918 |
|
SU100A1 |
| Изд | |||
| МГУ | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| АГРЕГАТ ДЛЯ УБОРКИ ХЛОПЧАТНИКА \ \\ | 0 |
|
SU169326A1 |

