Устройство относится к разделу погрузочно-разгрузочные устройства и может быть использовано для автоматического пакетирования тары с боеприпасами и ракетами.
Заявителю не известны аналоги и прототипы устройства, имеющие схожее целевое предназначение.
Цель предполагаемого изобретения - создание устройства, позволяющего автоматически пакетировать тару с боеприпасами и ракетами. Под ракетами понимается противотанковые управляемые ракеты (далее - ПТУР).
Указанная цель достигается техническим результатом изобретения, который реализован следующим образом:
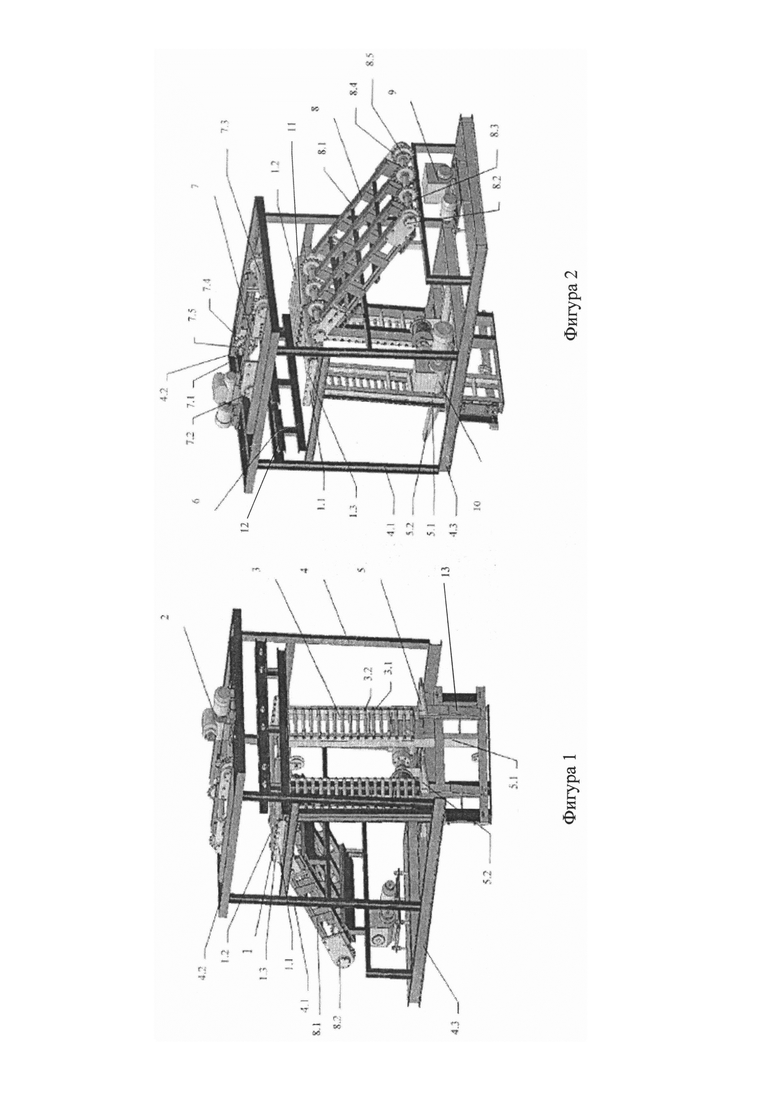
Узлы устройства для автоматического пакетирования тары с боеприпасами и ракетами, изображенного на фигурах 1 и 2 (фиг. 1 - вид сзади, фиг. 2 - вид спереди), закреплены на раме 4, представляющей собой сварную пространственную конструкцию, выполненную из металлопроката. Рама 4 состоит из стоек 4.1, к которым сваркой закреплены верхняя рама 4.2 и нижняя рама 4.3. Внутри рам 4.2 и 4.3 вварены связи для крепления приводов 2, 9, 10 механизмов 5, 7, 8. Для крепления узлов на рамах 4.1 и 4.2 просверлены отверстия под болты. Рама 4 крепится болтами к бетонному фундаменту. На раме винтами закреплены ограждения и сетчатые заполнения, исключающие попадание людей и посторонних предметов в зону перемещающихся частей изделия. Секция подъемная 8 предназначена для приема ящика с боеприпасами и ракетами и подъема его на переходный роликовый стол 1. Секция подъемная 8 представляет собой раму 8.1, выполненную из металлопроката. Детали рамы соединены между собой сваркой. С обеих сторон рамы с помощью резьбовых соединений закреплены корпуса подшипников 8.2, в которых посажены подшипники для установки валов 8.3 со звездочками 8.4 для приводных цепей. Секция подъемная 8 крепится к раме 4 болтами. Вращение нижнему валу 8.3 подъемной секции 8 передается от привода 9 на зубчатое колесо 8.5 с помощью цепной передачи.
Переходный роликовый стол 1 предназначен для приема ящика с боеприпасами с секции подъемной 8 и подачи его на каретку для установки пакета ящиков 5. Переходной роликовый стол 1 представляет собой раму 1.1, сваренную из стальных уголков, на которой на осях 1.3 посажены свободно вращающиеся ролики 1.2. Ролики выполнены из стальных труб, с обоих концов которых запрессованы подшипники для посадки осей. Переходный роликовый стол 1 закреплен болтами на раме 4. Каретка для установки пакета ящиков 5 предназначена для формирования пакета ящиков с боеприпасами и состоит из стойки 5.1, приводной цепи и передвижной каретки с вилами 5.2. Стойка 5.1 представляет собой вертикальную раму, сваренную из стальных уголков и закрепленную болтами к раме 4. На верху рамы 4 установлена секция толкателей 7, предназначенная для перемещения ящика с боеприпасами с переходного роликового стола 1 на вилы передвижной каретки 5.2. Секция толкателей 7 представляет собой рамную сварную конструкцию 7.1, на которой болтами закреплены четыре корпуса подшипников 7.2 для установки валов 7.3 со звездочками 7.4. Вращение валу 7.3 передается цепной передачей от привода 2 через звездочку 7.5. На звездочках 7.4 установлены цепи, на которых закреплены толкатели, перемещающие ящик с боеприпасами по роликовому столу 1. Упор 6 предназначен для ограничения перемещения ящика с боеприпасами при установке его в пакет и представляет собой сварную раму, закрепленную болтами на раме 4. Опорные ролики пакета 3 предназначены для обеспечения устойчивости формируемого пакета ящика при его опускании на каретке 5. Опорные ролики пакета 3 состоят из сварной рамы 3.1, выполненной из металлических уголков. На стойках рамы 3.1 на осях посажены ролики 3.2, с обоих концов которых запрессованы подшипники для посадки осей. Рама 3.1 закреплена болтами к раме 4. Рама 4 и рамы узлов 3, 5-8 и сетчатых ограждений выполнены из металлопроката (швеллеров, уголков и труб прямоугольного сечения), марка стали Ст.3 ГОСТ 380-2005. Валы, оси и звездочки приводных цепей выполнены из стали марки Ст.45 ГОСТ 1050- 2013).
Устройство для автоматического пакетирования тары с боеприпасами и ракетами реализует следующие теоретические положения.
В настоящее время одной из основных особенностей проведения погрузочно- разгрузочных работ является возможность своевременно и в полном объеме в кратчайшие сроки произвести погрузку материальных средств для обеспечиваемых подразделений. Поэтому одной из важных задач проведения погрузочно-разгрузочных работ является обоснованный выбор средств механизации, обеспечивающих решения поставленной задачи по погрузке материальных средств за минимальное время и с минимальными затратами.
Управление работой изделия осуществляется системой управления, состоящей из шкафа управления, пульта управления, датчиков положения механизмов. Система управления позволяет производить формирование пакета ящиков в автоматическом и ручном режимах. В качестве датчиков положения механизмов используются путевые выключатели. Перед началом работы путевые выключатели и упор 6 устанавливаются в необходимое положение в зависимости от размеров ящиков.
Принцип работы устройства:
В исходном состоянии вилы каретки 5.2 находятся на одном уровне с роликами подъемного стола 1. Ящик с боеприпасами подается на подъемный стол. С подъемного стола ящик подается на подъемную секцию 8. При включении электродвигателя приводной станции 9 вращение выходного вала редуктора через цепную передачу передается звездочке 8.5, которая через шпонку передает вращение валу 8.3. Звездочки 8.4, посаженные на валах 8.3, начинают вращаться вместе с цепями. Цепи перемещаются и поднимают ящик с боеприпасами на роликовый стол 1. Ящик воздействует на путевой выключатель 11, который отключает электродвигатель приводной станции 9 подъемной секции 8 и включает электродвигатель приводной станции 2. Выходной вал приводной станции 2 через цепную передачу передает вращение звездочке 7.5, которая через шпонку передает вращение валу 7.3, который, вращаясь, через шпоночные соединения передают вращение звездочкам 7.4. При вращении звездочек 7.4 начинают перемещаться установленные на них цепи с закрепленными толкателями, которые перемещают ящик по роликовому столу 1 на вилы 5.2 каретки 5 до соприкосновения с упором 6. Ящик воздействует на путевой выключатель 12, установленный на упоре 6, который отключает приводную станцию 2 и включает приводную станцию 10 каретки 5. Включается электродвигатель приводной станции 10, которая через цепную передачу передает вращение валу с посаженными звездочками каретки 5. При вращении звездочек начинают перемещаться, посаженные па них цепи, к которым закреплены вилы каретки 5.2. Вилы перемещаются вниз на расстояние, равное высоте ящика. Происходит освобождение упора и воздействие на путевой выключатель 12, который отключает приводную станцию 10 каретки 5.
Изделие повторяет цикл до набора необходимого пакета ящиков, при этом каретка 5 опустится в крайнее нижнее положение до воздействия на путевой выключатель 13. Сформированный пакет ящиков снимают с вил каретки 5 электропогрузчиком или ручной тачкой.
За счет использования путевых выключателей обеспечивается отключение и включение различных устройств в необходимое время, за счет чего выполняется безударное пакетирование тары, тем самым обеспечивается безопасность проводимых работ.
Устройство для автоматического пакетирования тары с боеприпасами и ракетами, за счет наличия подъемной секции, позволяет осуществлять прием тары с производственных конвейеров, погрузочно-разгрузочных машин, а также с транспортных средств, тем самым позволяет усовершенствовать технологический процесс проведения погрузочно-разгрузочных работ, так как нет необходимости в установке дополнительного технологического оборудовании или использовании дополнительной рабочей силы по подаче ящиков на пакетировщик.
Таким образом, использование устройства позволит:
снизить время на выполнение операций по проведению погрузочно-разгрузочных работ на арсеналах комплексного хранения;
осуществлять позволяющего автоматически пакетировать тару с боеприпасами и ракетами различных номенклатур;
усовершенствовать технологический процесс проведения погрузочно-разгрузочных работ;
обеспечить безопасное проведение пакетирования тары с боеприпасами и ракетами.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПАКЕТИРОВАНИЯ И ТРАНСПОРТИРОВАНИЯ ПОТЕНЦИАЛЬНО ОПАСНЫХ ИЗДЕЛИЙ | 2019 |
|
RU2724475C1 |
| СТОЛ ПОГРУЗОЧНО-РАЗГРУЗОЧНЫЙ | 2015 |
|
RU2591101C1 |
| Автоматическая линия для разгрузки бетонных элементов на поддонах из сушильных вагонеток | 1982 |
|
SU1115906A1 |
| ПЕРЕГРУЖАТЕЛЬ ТАРНО-ШТУЧНЫХ ГРУЗОВ | 2000 |
|
RU2203213C2 |
| Устройство для пакетирования тарно-штучных грузов | 1977 |
|
SU686960A1 |
| Пакетоформирующая машина | 1984 |
|
SU1168497A1 |
| Устройство для укладки грузов в пакет | 1983 |
|
SU1194797A1 |
| СТОЛ ПЕРЕГРУЗОЧНЫЙ | 2018 |
|
RU2695863C1 |
| СТОЛ ПЕРЕГРУЗОЧНЫЙ | 2022 |
|
RU2791485C1 |
| Устройство для накопления и поштучной выдачи изделий | 1974 |
|
SU598799A1 |
Устройство для автоматического пакетирования тары с боеприпасами и ракетами содержит установленные на раме секцию подъемную с приводными цепями, переходной роликовый стол, каретку для установки пакета ящиков, секцию толкателей, предназначенную для перемещения ящика с переходного роликового стола на вилы каретки, упор для ограничения перемещения ящика при установке его в пакет, путевые выключатели, приводные станции, а также содержит систему управления. Упор и путевые выключатели имеют возможность установки в зависимости от размеров ящика. Устройство позволяет осуществлять быстрое автоматическое безопасное пакетирование тары с боеприпасами и ракетами. 2 ил.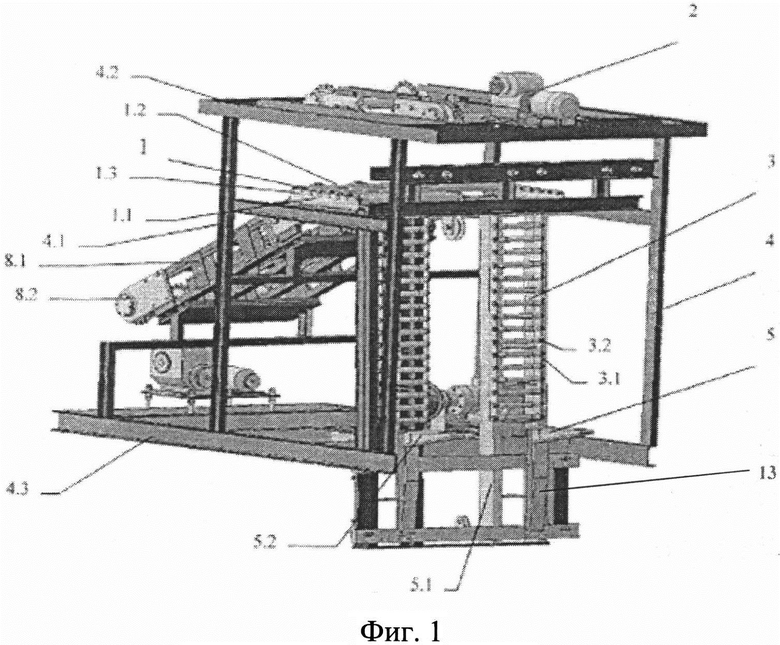
Устройство для автоматического пакетирования тары с боеприпасами и ракетами, отличающееся тем, что содержит установленные на раме секцию подъемную с приводными цепями, переходной роликовый стол, каретку для установки пакета ящиков, секцию толкателей, предназначенную для перемещения ящика с переходного роликового стола на вилы каретки, упор для ограничения перемещения ящика при установке его в пакет, путевые выключатели, приводные станции, а также содержит систему управления, причем указанные упор и путевые выключатели имеют возможность установки в зависимости от размеров ящика.
| ТРАНСПОРТИРОВОЧНАЯ РАМА ДЛЯ КОНТЕЙНЕРОВ | 2013 |
|
RU2531887C1 |
| Устройство для штабелирования предметов | 1988 |
|
SU1551582A1 |
| Способ получения минерального наполнителя на основе каолина | 1986 |
|
SU1411325A1 |

