Изобретение относится к способам радиоконтроля для определения местоположения обнаруживаемых наземных радиоизлучающих объектов и может быть использовано при проведении поисковых, разведывательных и спасательных операций.
Известен способ триангуляции целей [1] с помощью двух двухкоординатных пеленгаторов (измеряются азимуты и углы места пеленгов) с известными координатами точек стояния. Способ предназначен для определения пространственных координат излучающих воздушных объектов. Результаты триангуляции используются в качестве исходных данных для постановки целей на сопровождение более точными средствами. Применительно к наземным объектам недостатками способа [1] являются избыточный громоздкий математический аппарат и невысокая точность результатов. Кроме того, способ ориентирован на применение в составе оптоэлектронных станций обнаружения объектов.
Известны способы определения координат местоположения источников радиоизлучения [2, 3], общим для которых является измерение уровней радиоизлучений, принимаемых сканирующими радиоприемными устройствами не менее четырех разнесенных в пространстве стационарных радиоконтрольных постов радиочастотной службы РФ. Местоположение источника определяется как среднее широты и долготы точек пересечения радикальных осей попарных окружностей равных отношений уровней принимаемых радиоизлучений. Недостатками способов являются низкая оперативность местоопределения, а также отсутствие возможности мобильного развертывания и применения средств радиоконтроля.
Наиболее близким к заявляемому изобретению (прототипом) является способ определения местоположения радиоизлучающего объекта (источника радиоизлучения по терминологии прототипа), изложенный в патенте [4]. Для местоопределения радиоизлучающего объекта (РИО) предлагается использовать пеленгатор, антенная система которого совмещена с видеокамерой, размещаемой над антенной решеткой антенной системы или в ее центре.
На первом (подготовительном) этапе способа последовательно выполняются следующие операции: пеленгование РИО (измерение азимута и угла места объекта в антенной системе координат); однонаправленное ориентирование антенной решетки пеленгатора и видеокамеры; приведение угловых параметров антенной системы пеленгатора в соответствие угловым параметрам видеокамеры путем расчета поправок на несовпадение центров и осей их систем координат. Этап завершается коррекцией измеренных при пеленговании угловых параметров РИО внесением рассчитанных поправок.
Второй (заключительный) этап состоит в перестройке и наведении видеокамеры в соответствии с скорректированными угловыми параметрами и уточнении местоположения РИО путем визуального считывания его изображения.
Главными недостатками способа-прототипа являются низкая точность и малые размеры контролируемой области. Это обусловлено следующими обстоятельствами.
Метод визуального анализа изображения РИО, считанного с видеокамеры, позволяет лишь локализовать его местоположение в контролируемой области, однако исключает возможность определения координат с приемлемой точностью. Используемый метод этого просто не предусматривает. Малые размеры области контроля обусловлены ограниченными пределами прямой видимости видеокамеры, совмещенной с стационарной антенной системой пеленгатора (см. с. 10 описания прототипа).
Недостатками также являются низкие мобильность и оперативность развертывания аппаратуры и сложность реализации. Первый недостаток связан с значительными габаритами и сложностью конструкции антенной решетки антенной системы пеленгатора с жестко закрепленной видеокамерой (см. Фиг. 2 описания прототипа) и требованием предварительной калибровки (в ряде случаев неоднократной) с помощью специального выносного тестирующего генератора. Второй обусловлен использованием громоздкого, избыточного (по ряду позиций излишнего) математического аппарата по согласованию исходных пространственных параметров антенной системы и видеокамеры. Это подтверждается сложностью структурной схемы и алгоритмов работы соответствующего устройства, реализующего способ-прототип (см. Фиг. 3-7 описания прототипа).
Цель заявляемого изобретения состоит в создании высокоточного, обладающего широкой областью радиоконтроля, мобильностью и оперативностью, простого в реализации способа определения местоположения наземного радиоизлучающего объекта (средство радиосвязи, радиолокационная станция, радиомаяк и др.).
Для достижения поставленной цели в способе определения местоположения наземного радиоизлучающего объекта с использованием пеленгатора и видеокамеры, заключающемся в том, что на первом этапе выполняют пеленгование объекта, по данным которого на втором этапе уточняют местоположение объекта по его видеоизображению, на первом этапе по данным двух и более наземных пеленгаторов определяют предварительные координаты объекта и прилегающую зону его последующего поиска и обнаружения, на втором этапе используют мультикоптер с видеокамерой в надирном положении, для которого рассчитывают маршрут полета от точки запуска до заданной характерной точки зоны, по достижении зоны обеспечивают движение мультикоптера по выбранной траектории поиска, выполняемого путем обзора видеокамерой подстилающей местности, при обнаружении объекта уточненные координаты объекта определяют путем считывания с цифровой карты местности координат его изображения на совмещенном с картой видеокадре.
Технический результат состоит в повышении точности и расширении области радиоконтроля при определении местоположения наземного радиоизлучающего объекта.
Существенные отличительные признаки заявляемого способа по сравнению с прототипом заключаются в следующем.
1. На первом этапе по данным двух и более наземных пеленгаторов определяют предварительные координаты РИО и прилегающую зону его последующего поиска и обнаружения. Тем самым формируют исходные данные для второго этапа, обеспечивающие с помощью видеокамеры гарантированное с заданной доверительной вероятностью (см. далее сущность заявляемого способа) обнаружение и высокоточное определение координат объекта.
В прототипе, использующем данные одного пеленгатора, первый этап завершается формированием параметров перестройки и наведения видеокамеры, обеспечивающих визуальное наблюдение РИО.
2. На втором этапе используют мультикоптер с видеокамерой в надирном положении, для которого рассчитывают маршрут полета от точки запуска до заданной характерной точки зоны поиска и обнаружения РИО. Использование мультикоптера с видеокамерой обеспечивает существенное расширение области радиоконтроля, ограничиваемое только дальностями действия пеленгаторов и полета мультикоптера (на практике это десятки километров). Кроме того, используемый аппаратурный состав обеспечивает мобильность и оперативность развертывания и применения, а также простоту реализации, не требующей сложного математического аппарата (см. далее).
В прототипе мультикоптер не предусмотрен. Видеокамера совмещена с стационарной антенной системой пеленгатора, что ограничивает область радиоконтроля пределами прямой видимости. Естественно, маршрут полета не рассчитывается.
3. По достижении зоны обеспечивают движение мультикоптера по выбранной траектории поиска, выполняемого путем обзора видеокамерой подстилающей местности. Этим обеспечивается гарантированное обнаружение РИО в зоне.
В прототипе эта функция отсутствует.
4. При обнаружении объекта уточненные координаты объекта определяют путем считывания с цифровой карты местности (ортофотоплана) координат его изображения на совмещенном с картой видеокадре. Поскольку современные цифровые карты и ортофотопланы являются высокоточными, обеспечивается высокая итоговая точность координатной привязки РИО.
В прототипе эта функция отсутствует. Уточнение местоположения РИО сводится к визуальному анализу его изображения, исключающему координатную привязку с какой-либо приемлемой точностью.
Заявляемое изобретение иллюстрируют следующие графические материалы.
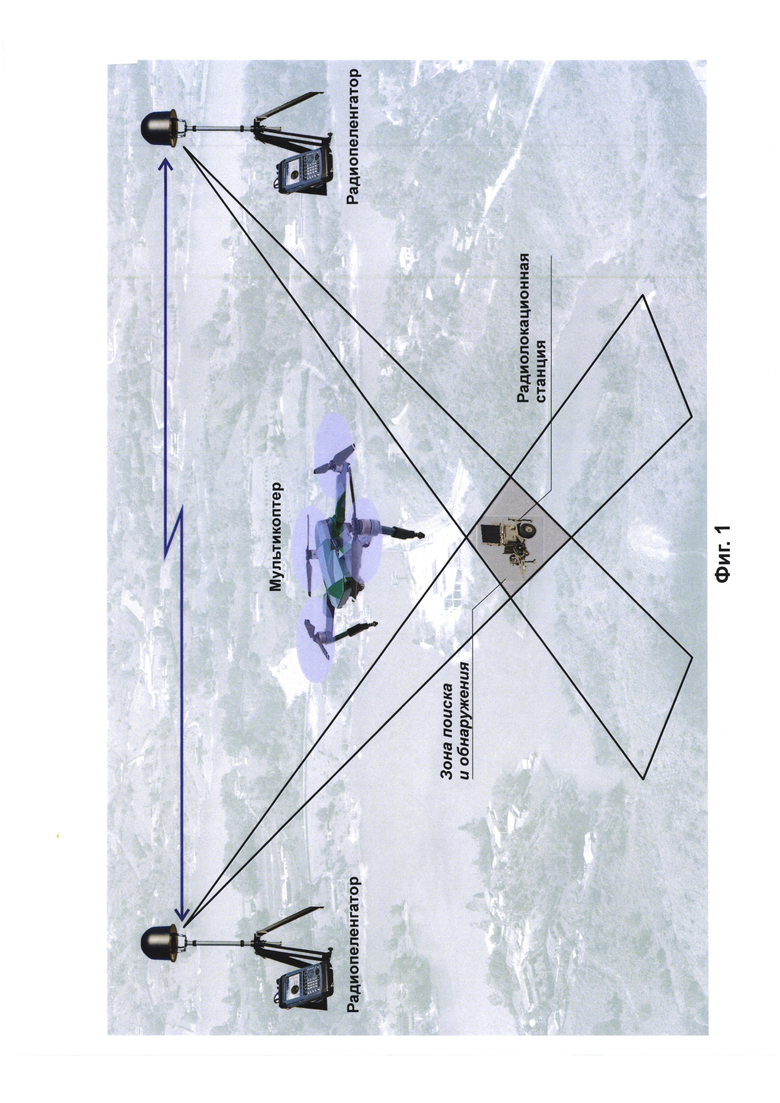
Фиг. 1. Общая схема определения местоположения наземного радиоизлучающего объекта. Синим цветом показана радиолиния обмена данными между пеленгаторами. РИО представлен радиолокационной станцией.
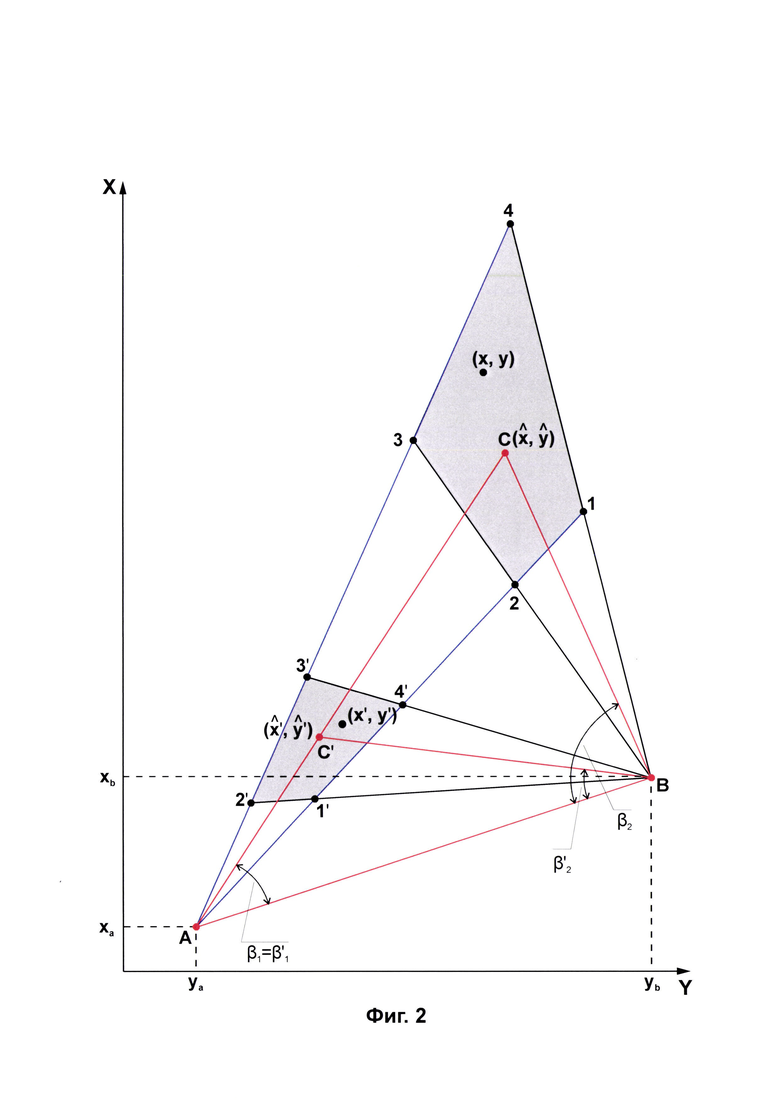
Фиг. 2. Триангуляционная схема прямой угловой засечки двух РИО парой пеленгаторов с прилегающими зонами поиска и обнаружения. Здесь (х, у), (х', у') - истинные координаты РИО.
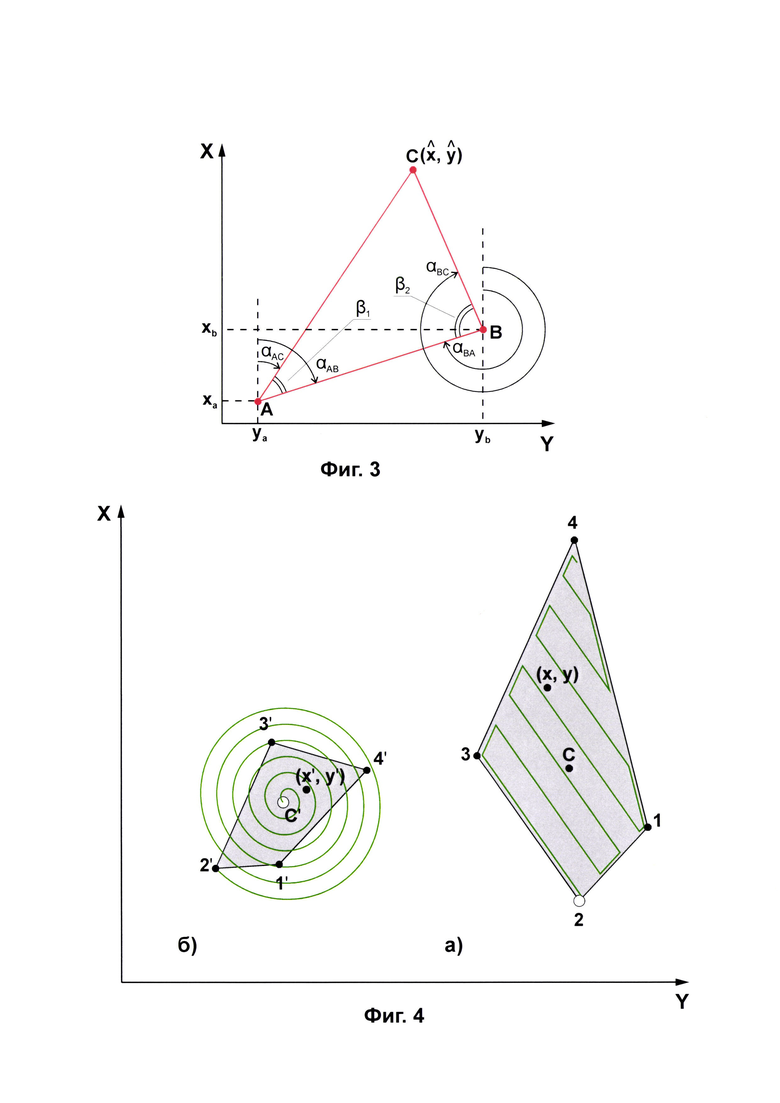
Фиг. 3. Связь между дирекционными углами, измеряемыми пеленгаторами, и углами триангуляционного треугольника.
Фиг. 4. Траектории поиска в зоне (Фиг. 4а - растровая траектория, Фиг. 4б -спиралевидная траектория). Показаны зеленым цветом. Значком "О" обозначены заданные характерные точки.
Рассмотрим сущность заявляемого способа. Подробное рассмотрение проведем применительно к схеме с двумя радиопеленгаторами (Фиг. 1) с кратким обобщением на большее число.
Полагаем, что портативные (носимые) пеленгаторы расположены на местности в произвольных точках А, В с известными плановыми координатами (ха, уа), (хв, ув) (Фиг. 2). Координаты получены с помощью высокоточной аппаратуры потребителей спутниковых радионавигационных систем (СРНС). По данным пеленгаторов определены углы триангуляционных треугольников β1, β2, β'1, β'2 для двух наземных РИО, отсчитываемые относительно базы АВ (для простоты и наглядности принято β1=β'1). Координаты первого пеленгуемого РИО (точка С) рассчитывают по формулам Юнга:

Аналогично для координат  второго объекта (точка С') при использовании углов β'1, β'2.
второго объекта (точка С') при использовании углов β'1, β'2.
Приведенный алгоритм является радиотехническим вариантом реализации известного способа прямой угловой засечки.
Определение углов триангуляции по пеленгам сопровождается погрешностями, вызванными целым рядом случайных факторов. Иными словами, значения углов β1,…,β'2 являются точечными оценками истинного углового положения РИО со случайными ошибками, которые можно считать распределенными по нормальному закону с нулевым математическим ожиданием и среднеквадратическим отклонением (СКО) σβ 
Существующие малогабаритные радиопеленгаторы характеризуются значительными СКО σβ ошибок угловых измерений (порядка 5-10 угл. град.). Как результат, грубыми являются точечные оценки  истинных координат РИО (х, у), (х', у'), что делает их непригодными для решения целевых задач при поисковых, разведывательных и спасательных операциях. Такие предварительные оценки требуют уточнения.
истинных координат РИО (х, у), (х', у'), что делает их непригодными для решения целевых задач при поисковых, разведывательных и спасательных операциях. Такие предварительные оценки требуют уточнения.
В этих условиях предлагается перейти от точечных к интервальным оценкам углов триангуляционных треугольников (β1±kσβ),…,(β'2±kσβ), накрывающим истинные точки местоположения объектов с заданной доверительной вероятностью Рзад=Рзад(k), k=1, 2, …(двусторонним доверительным интервалам). Так, при Рзад=0,95 k=2 (приблизительно) и (β1±2σβ),…,(β'2±2σβ). Аналогично, при Рзад=0,9973 k=3 и (β1±3σβ),…,(β'2±3σβ).
На Фиг. 2 синим и черным цветами в качестве примера показаны перекрывающиеся угловые секторы, соответствующие доверительным интервалам при Рзад=0,95, k=2 и σβ=5 угл. град. Здесь же приведены заштрихованные зоны поиска РИО, находящихся на разном удалении от точек А, В расположения пеленгаторов. Поскольку одновременное нахождение РИО в обоих секторах есть произведение двух независимых совместных событий, полная вероятность Р нахождения РИО в соответствующих зонах одинакова и равна  . При Рзад=0,95 это Р=0,9025, при Рзад=0,9973 - Р=0,9946. Такие значения вероятности Р практически гарантируют последующее обнаружение объектов.
. При Рзад=0,95 это Р=0,9025, при Рзад=0,9973 - Р=0,9946. Такие значения вероятности Р практически гарантируют последующее обнаружение объектов.
При угловых измерениях радиопеленгаторами фиксируются либо непосредственно дирекционные углы направлений на объект пеленгации, либо истинные или магнитные азимуты с последующим переходом к дирекционным углам. Определение углов триангуляционного треугольника выполняется в соответствии с Фиг. 3 по формулам:
β1=αAB-αAC, β2=αBC-αBA
где αAC, αBC - дирекционные углы направлений на объект,
αAB, αBA - дирекционные углы направлений АВ, ВА, равные:

Определение размеров и границ зон поиска и обнаружения проводится путем расчета координат  вершин неправильных четырехугольников (см. Фиг. 2) по формулам (1) перебором пар углов
вершин неправильных четырехугольников (см. Фиг. 2) по формулам (1) перебором пар углов 
Следующим шагом является расчет маршрута полета мультикоптера с видеокамерой от точки запуска до заданной характерной точки зоны поиска и обнаружения. В общем случае точка запуска может не совпадать с точками расположения пеленгаторов. Условием рационального выбора точки является соблюдение баланса между дальностями действия пеленгаторов и полета мультикоптера. Далее для конкретности точкой запуска мультикоптера будем считать начало системы координат на Фиг. 2.
Из Фиг. 2 видно, что при одинаковых доверительных угловых интервалах (угловых секторах) линейные размеры (площадь) зон поиска и обнаружения тем больше, чем больше удаление РИО от пеленгаторов (точки А, В). Расчет маршрута полета мультикоптера целесообразно выполнять, минимизируя (по возможности) подлетное время к зоне. Исходя из этого, в рассматриваемом случае характерную точку зоны (1,…,4) следует задать точкой 2, а характерную точку зоны (1',…,4') можно задать точкой С'.
Задание характерных точек определяет выбор траектории поиска, выполняемого мультикоптером путем обзора видеокамерой подстилающей местности зоны. Так, для большей по площади зоны (1,…,4) предпочтительной является оперативная растровая траектория поиска (Фиг. 4а), а для меньшей зоны (1',…,4') - менее оперативная, но более детальная спиралевидная траектория (Фиг. 4б). (Отметим, что во втором случае для полного покрытия зоны требуется захват не входящих в зону прилегающих областей).
Аналогичные рекомендации по выбору маршрутов и траекторий следует выполнять при других вариантах взаимного расположения точек запуска, расположения пеленгаторов и РИО.
При обнаружении РИО видеокамерой проводится аватоматизированное совмещение видеокадра, содержащего объект (масштабирование, сдвиг, поворот), с соответствующим участком цифровой карты местности (ортофотоплана), с которого в итоге считывают уточненные координаты его изображения. Использование трехмерных цифровых карт позволяет получить как плановые координаты РИО, так и его высоту.
Изложенное справедливо для задач с тремя и более пеленгаторами. Отличие состоит лишь в более сложной форме зон поиска и обнаружения. Так, при трех пеленгаторах зона может иметь форму неправильного шестиугольника с площадью меньшей, чем у сопоставимого четырехугольника при двух пеленгаторах.
Техническая реализация заявляемого способа не вызывает сложности, поскольку используемые средства - радиопеленгаторы и мультикоптер с видеокамерой, - широко доступны. Так, в качестве пеленгаторов могут использоваться отечественные носимые (ручные) измерительные комплексы серии АРК (АРК-РПЗМ, АРК-НКЗИ, АРК-НК4И, АРК-НК5И и др.). Характеристиками, соответствующими заявляемому способу, обладает портативный пеленгатор DDF 007 компании Rohde&Schwarz со встроенными аппаратурой потребителя СРНС и электронным магнитным компасом (изображен на Фиг. 1). В качестве мультикоптера может использоваться квадрокоптер производства компании DJI, оснащенный необходимыми для удержания бортовой видеокамеры в надирном положении системами стабилизации центра масс и вокруг центра масс (угловой стабилизации). Несложный математический аппарат способа легко реализуется на доступных вычислительных устройствах.
Таким образом, заявляемый способ может быть реализован и обеспечивает повышение точности и расширение области радиоконтроля при определении местоположения наземного радиоизлучающего объекта.
Источники информации:
1. Патент RU 2423720.
2. Патент RU 2423721.
3. Патент RU 2430385.
4. Патент RU 2427000.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения географических координат источников радиоизлучения в многоцелевой обстановке | 2021 |
|
RU2773307C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2834270C1 |
| Способ и устройство противодействия беспилотным летательным аппаратам | 2023 |
|
RU2818398C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ВЫСОКОТОЧНОГО ОДНОЭТАПНОГО ПЕЛЕНГАТОРА И АДРЕСНО-ОТВЕТНОЙ ПАКЕТНОЙ ЦИФРОВОЙ РАДИОЛИНИИ В ДКМВ ДИАПАЗОНЕ | 2016 |
|
RU2613369C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2526094C1 |
| ОДНОПОЗИЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2016 |
|
RU2657237C1 |
| Способ поисковых и спасательных операций с помощью беспилотного воздушного судна | 2023 |
|
RU2818393C1 |
| Способ определения координат источника радиоизлучения в трехмерном пространстве динамической системой радиоконтроля | 2019 |
|
RU2715422C1 |
| Способ определения координат объектов и их распознавания | 2022 |
|
RU2787946C1 |
| ТРИАНГУЛЯЦИОННО-ГИПЕРБОЛИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ РАДИОИЗЛУЧАЮЩИХ ВОЗДУШНЫХ ОБЪЕКТОВ В ПРОСТРАНСТВЕ | 2012 |
|
RU2503969C1 |
Изобретение относится к способам радиоконтроля и предназначено для определения местоположения обнаруживаемых наземных радиоизлучающих объектов. Для этого по данным двух и более радиопеленгаторов определяют предварительные координаты объекта и зону его последующего поиска и обнаружения с заданной доверительной вероятностью. Далее используют мультикоптер с видеокамерой, для которого рассчитывают маршрут полета от точки запуска до заданной характерной точки зоны. По достижении зоны обеспечивают движение мультикоптера по выбранной траектории поиска. При обнаружении объекта уточненные координаты определяют путем считывания с цифровой карты местности координат его изображения на совмещенном с картой видеокадре. Технический результат - повышение точности и расширение области радиоконтроля. 4 ил.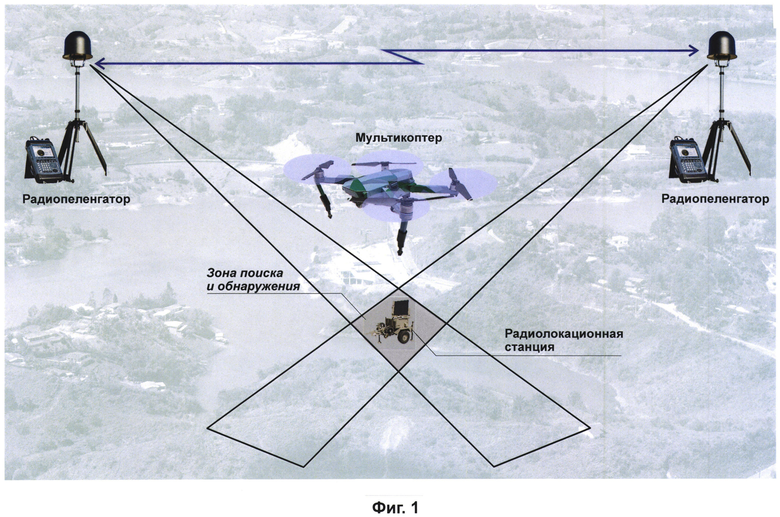
Способ определения местоположения наземного радиоизлучающего объекта с использованием пеленгатора и видеокамеры, заключающийся в том, что на первом этапе выполняют пеленгование объекта, по данным которого на втором этапе уточняют местоположение объекта по его видеоизображению, отличающийся тем, что на первом этапе по данным двух и более наземных пеленгаторов определяют предварительные координаты объекта и прилегающую зону его последующего поиска и обнаружения, на втором этапе используют мультикоптер с видеокамерой в надирном положении, для которого рассчитывают маршрут полета от точки запуска до заданной характерной точки зоны, по достижении зоны обеспечивают движение мультикоптера по выбранной траектории поиска, выполняемого путем обзора видеокамерой подстилающей местности, при обнаружении объекта уточненные координаты объекта определяют путем считывания с цифровой карты местности координат его изображения на совмещенном с картой видеокадре.
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2011 |
|
RU2469408C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2014 |
|
RU2550811C1 |
| Способ проведения поисково-спасательных работ | 2018 |
|
RU2698893C1 |
| СПОСОБ УСТАНОВЛЕНИЯ ПЛАНОВОЙ ТРАЕКТОРИИ ПОЛЕТА ТРАНСПОРТНОГО СРЕДСТВА ВОЗЛЕ ЦЕЛИ (ВАРИАНТЫ), ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2017 |
|
RU2687008C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2009 |
|
RU2427000C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2009 |
|
RU2430385C2 |
| US 9811084 B2, 07.11.2017 | |||
| US 10089889 B2, 02.10.2018 | |||
| JPH 10153651 A, 09.06.1998 | |||
| JP 2011242182 A, 01.12.2011 | |||
| US 2010250022 A1, 30.09.2010. | |||

