Изобретение относится к медицинской технике, в частности к техническим средствам реабилитации инвалидов, и может быть использовано для повышения устойчивости движения экзоскелета, предназначенного для пользователей с нарушением функций опорно-двигательного аппарата.
Известен способ обеспечения устойчивости роботизированной подвижной платформы (пат. RU 159557), заключающийся в изменении координат общего центра масс платформы путем смещения центра тяжести полезной нагрузки.
Недостатком известного способа является невозможность осуществления способа в мобильных роботизированных системах, не рассчитанных на несение дополнительной полезной нагрузки, кроме человека, в частности, в экзоскелетах медицинского назначения, предназначенных для реабилитации пользователей с нарушением функций опорно-двигательного аппарата.
Известен способ обеспечения устойчивости экзоскелета (пат. US 20120172770), реализуемый системой управления мобильностью экзоскелета за счет подсистемы управления балансом, которая совместно с подсистемой ландшафта, обнаруживающей наклон местности, регулирует движения привода экзоскелета таким образом, чтобы экзоскелет с пользователем находился в устойчивом состоянии.
Недостатком известного способа является то, что он не позволяет расширять диапазон безопасных наклонений экзоскелета, так как не обеспечивает возможность изменения (регулирования) координат расположения общего центра масс экзоскелета с пользователем.
Техническим результатом, достигаемым изобретением, является повышение эффективности системы обеспечения устойчивости экзоскелета с пользователем при критических наклонениях.
Указанный технический результат достигается тем, что способ обеспечения устойчивости экзоскелета с пользователем, осуществляемый изменением координат общего центра масс экзоскелета с пользователем путем смещения составной части экзоскелета, в качестве которой используется аккумуляторная батарея экзоскелета, автоматически смещаемая в противоположную от наклонения экзоскелета с пользователем сторону при приближении проекции общего центра масс экзоскелета с пользователем к границам площади опоры экзоскелета, причем перемещение центра масс аккумуляторной батареи приводит к перемещению общего центра масс экзоскелета в сторону отведения от границы опоры экзоскелета.
Реализация способа обеспечения устойчивости экзоскелета с пользователем поясняется рисунками, где:
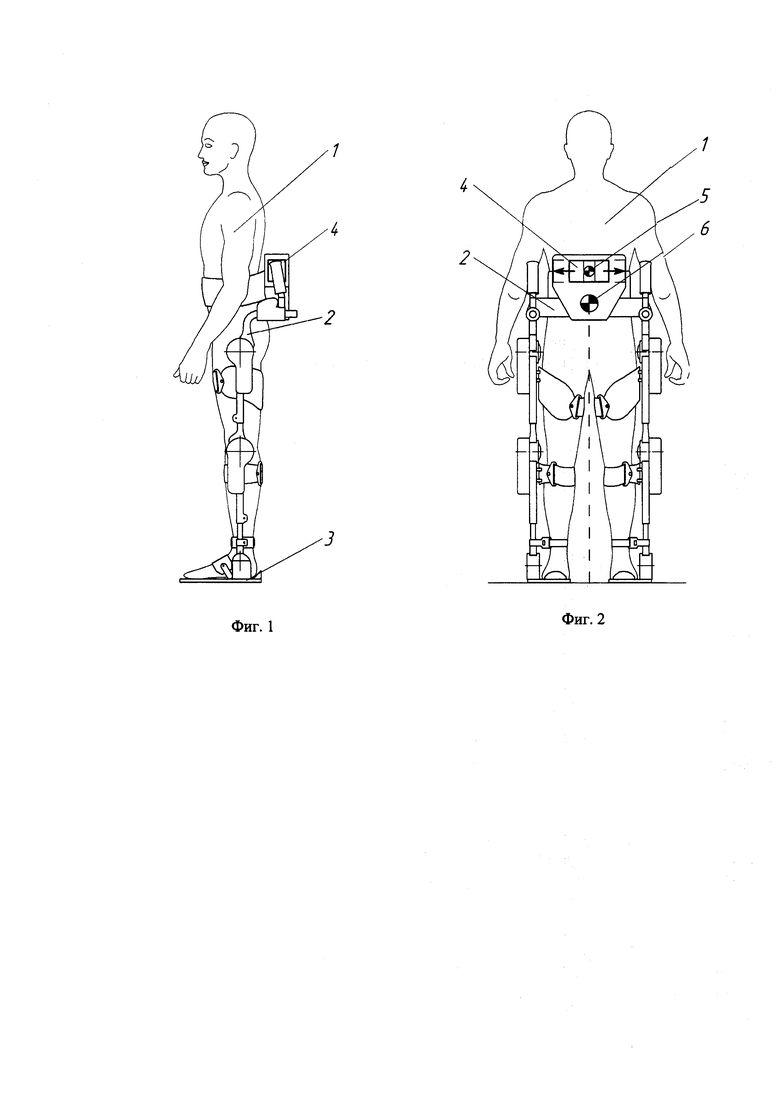
на фиг. 1 изображен экзоскелет с пользователем, вид сбоку;
на фиг. 2 изображен экзоскелет с пользователем, вид сзади;
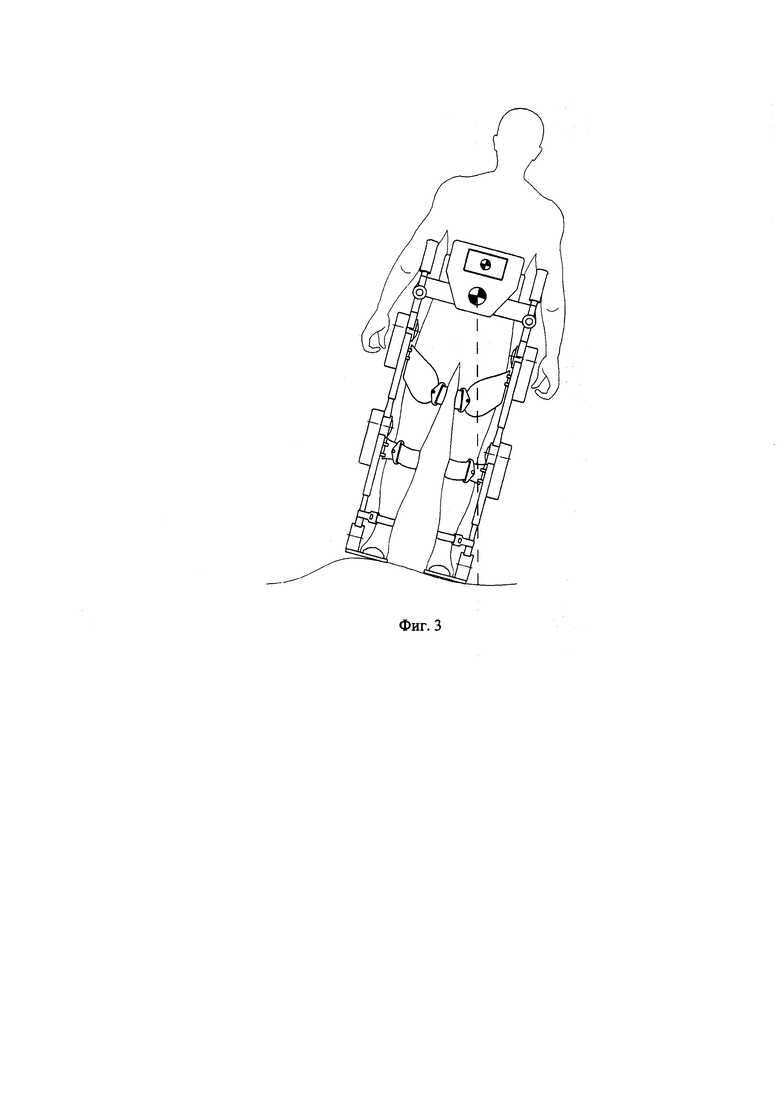
на фиг. 3 изображен экзоскелет с пользователем, в критическом положении, обусловленном потерей устойчивости, вследствие расположения общего центра масс экзоскелета с пользователем за пределами границы площади опоры экзоскелета;
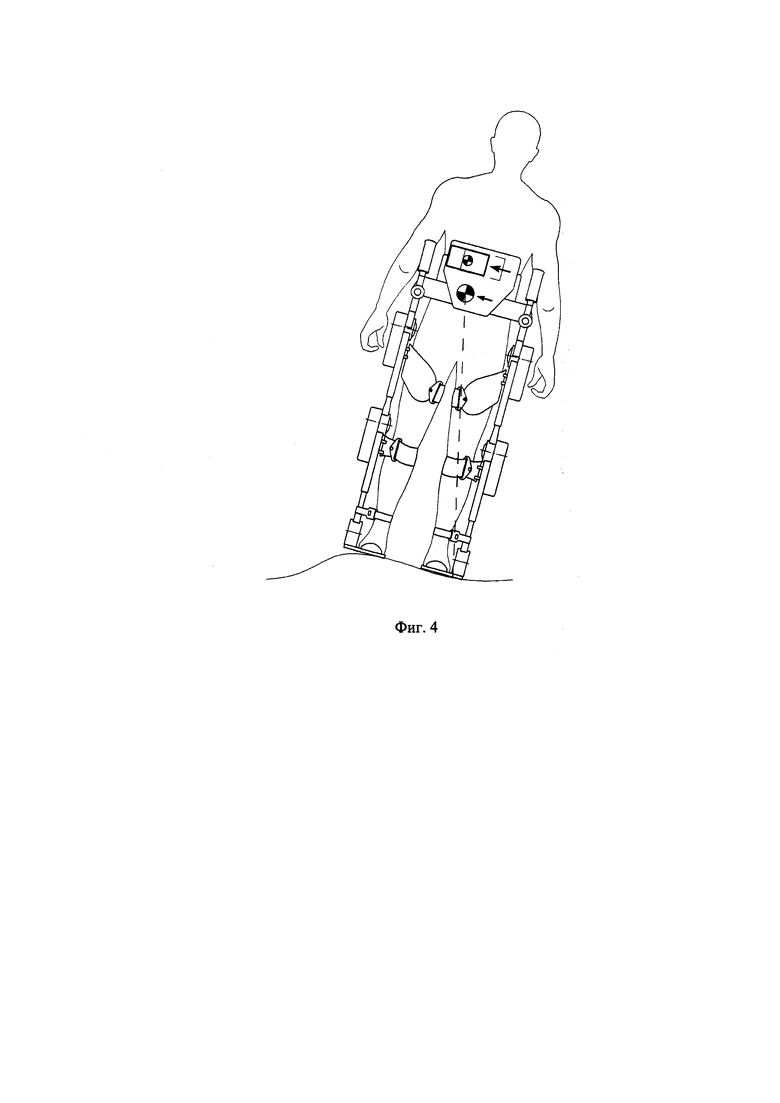
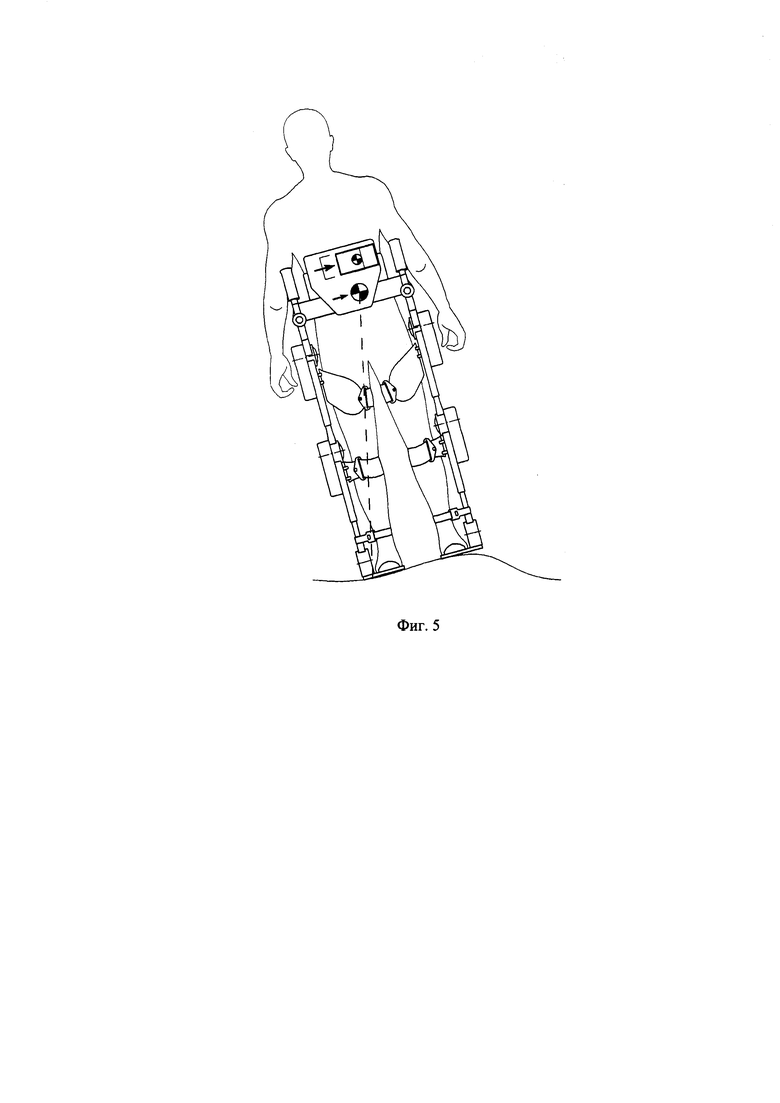
на фиг. 4 и 5 изображен экзоскелет с пользователем, в некритичном положении, обусловленном достаточной устойчивостью, вследствие приведения расположения проекции общего центра масс экзоскелета с пользователем в пределы границ площади опоры экзоскелета путем смещения аккумуляторной батареи экзоскелета без изменения положения экзоскелета с пользователем в целом.
Реализация способа обеспечения устойчивости экзоскелета с пользователем осуществляется следующим образом.
Пользователь 1 размещается в экзоскелете 2, содержащем ступни 3, источник энергообеспечения - аккумуляторную батарею 4, обладающую относительно значительной массой. Аккумуляторная батарея 4 имеет центр массы 5, который определяет положение общего центра масс 6 экзоскелета 2 с пользователем 1 в целом. При этом аккумуляторная батарея 4 имеет возможность перемещаться в экзоскелете 2, что приводит к изменению расположения ее центра массы 5.
При передвижении экзоскелета 2 с пользователем 1 могут возникать критические наклонения, обуславливающие возможность потери устойчивости, что может привести к падениям экзоскелета 2 с пользователем 1. Такие наклонения экзоскелета 2 с пользователем 1 могут возникать вследствие неровностей поверхности, по которой перемещается экзоскелет 2 с пользователем 1, при запинаниях, при внешних физических возмущениях, например, столкновениях, при сбоях в системе управления экзоскелетом 2, при некорректном использовании экзоскелета 2, при ошибках в действиях ассистирующего. В этом случае проекция общего центра масс 6 экзоскелета 2 с пользователем 1 будет находиться вблизи границ площади опоры ступней 3 экзоскелета 2. Для исключения риска падения экзоскелета 2 с пользователем 1 необходимо общий центр масс 6 отвести от границы площади опоры экзоскелета 2. Для этого массивная аккумуляторная батарея 4 перемещается в экзоскелете 2 в противоположную от наклонения экзоскелета 2 с пользователем 1 сторону, перемещая тем самым свой центр массы 5. Перемещение центра массы 5 аккумуляторной батареи 4 приводит к перемещению общего центра масс 6 в сторону отведения от границы опоры экзоскелета 2 без изменения положения экзоскелета 2 с пользователем 1, что приводит к более устойчивому состоянию экзоскелета 2 с пользователем 1. Перемещения аккумуляторной батареи 4 в экзоскелете 2 могут осуществляться внутренними механизмами экзоскелета 2, управляемыми командами от системы управления экзоскелета 2, которые формируются на основе показаний датчиков, фиксирующих критические наклонения экзоскелета 2 с пользователем 1.
Данный способ обеспечения устойчивости экзоскелета позволяет относительно простыми техническими решениями эффективно противодействовать опасным наклонениям экзоскелета, повышая тем самым его устойчивость.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭНЕРГООБЕСПЕЧЕНИЯ ЭКЗОСКЕЛЕТА | 2019 |
|
RU2745538C2 |
| ПАРА КОСТЫЛЕЙ ДЛЯ ЭКЗОСКЕЛЕТА | 2019 |
|
RU2770786C2 |
| СПОСОБ ПРОВЕДЕНИЯ ИСПЫТАНИЙ ЭКЗОСКЕЛЕТА | 2017 |
|
RU2711223C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭКЗОСКЕЛЕТОМ | 2018 |
|
RU2698364C1 |
| СПОСОБ ЧЕТЫРЕХОПОРНОГО ПЕРЕДВИЖЕНИЯ ДЕТСКОГО ЭКЗОСКЕЛЕТА | 2019 |
|
RU2739278C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭКЗОСКЕЛЕТОМ НИЖНИХ КОНЕЧНОСТЕЙ ГОЛОСОВЫМИ КОМАНДАМИ | 2019 |
|
RU2745539C2 |
| ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ | 2007 |
|
RU2339543C1 |
| Экзоскелет | 2023 |
|
RU2823489C1 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| Автономная гелиоэлектрическая люстра "АГЭЛЮКС" | 2016 |
|
RU2651455C1 |
Изобретение относится к медицине, а именно к способам обеспечения устойчивости экзоскелета с пользователем. Способ заключается в изменении координат общего центра масс экзоскелета с пользователем путем смещения составной части экзоскелета, в качестве которой используется аккумуляторная батарея экзоскелета. Батарея автоматически смещается в противоположную от наклонения экзоскелета с пользователем сторону при приближении проекции общего центра масс экзоскелета с пользователем к границам площади опоры экзоскелета. Перемещение центра масс аккумуляторной батареи приводит к перемещению общего центра масс экзоскелета в сторону отведения от границы опоры экзоскелета. Достигается повышение эффективности системы обеспечения устойчивости экзоскелета с пользователем при критических наклонениях. 5 ил.
Способ обеспечения устойчивости экзоскелета с пользователем, заключающийся в изменении координат общего центра масс экзоскелета с пользователем путем смещения составной части экзоскелета, в качестве которой используется аккумуляторная батарея экзоскелета, автоматически смещаемая в противоположную от наклонения экзоскелета с пользователем сторону при приближении проекции общего центра масс экзоскелета с пользователем к границам площади опоры экзоскелета, причем перемещение центра масс аккумуляторной батареи приводит к перемещению общего центра масс экзоскелета в сторону отведения от границы опоры экзоскелета.
| JP 2013208291 A, 10.10.2013 | |||
| СПОСОБ УПРАВЛЕНИЯ СТАБИЛИЗАЦИЕЙ ШАГАЮЩЕГО РОБОТА | 2011 |
|
RU2507061C2 |
| JP 2001129775 A, 15.05.2001 | |||
| US 7313463 B2, 25.12.2007 | |||
| ПРОКАТНАЯ УСТАНОВКА ДЛЯ ПОЛУЧЕНИЯ ТРУБЧАТОГО ПРОДУКТА И СПОСОБ ПОЛУЧЕНИЯ ТРУБЧАТОГО ПРОДУКТА (ВАРИАНТЫ) | 2011 |
|
RU2497610C2 |

