Изобретение относится к трубопроводному транспорту и может быть использовано при создании устройств внутритрубной диагностики, а также иных устройств, используемых при строительстве и капитальном ремонте объектов, имеющих трубопроводную обвязку.
В настоящее время для внутритрубной диагностики используются как традиционные внутритрубные снаряды-дефектоскопы, так и автономные роботизированные сканеры-дефектоскопы.
Внутритрубные снаряды движутся в трубе под действием потока газа, при этом труба не должна менять проходное сечение. Такие устройства могут быть использованы только на действующих магистральных газопроводах.
Известна универсальная платформа на магнитных колесах для внутритрубных устройств (патент РФ №2644432), содержащая магнитные мотор-колесные модули, рычажный подъемный механизм, установленный на ее передней оси и шарнирно соединенный с подъемной грузовой платформой, обеспечивающий оптимальную геометрическую форму универсальной платформы на магнитных колесах для маневрирования в трубопроводной обвязке, а также контакт всех четырех колес с криволинейной опорной поверхностью, при этом рычажный подъемный механизм обеспечивает оптимальное, регулируемое расстояние рабочего органа внутритрубного устройства, установленного на грузовой платформе, от поверхности трубы при выполнении диагностических и других видов работ.
Недостатком известной платформы является то, что при ее падении в трубе, во время движения по боковой поверхности трубы, вследствие налипания на магнитные колеса металлического мусора или других причин, автономно движущаяся платформа становится не извлекаемой.
Наиболее близкой по технической сущности и достигаемому результату к заявляемому изобретению является платформа для внутритрубного дефектоскопа на магнитных колесах (патент РФ №2605234), содержащая магнитные мотор-колесные модули, продольную ось, соединяющую трехосное шасси платформы между собой продольными шарнирами с ограничителями вращения, при этом продольная ось имеет поперечный шарнир, а крайние шарнирные втулки продольной оси соединены с валами мотор-редукторов, установленных на крайних осях шасси платформы в продольном направлении.
Недостатком известной платформы является трехосное шасси, на котором невозможен монтаж единого блока внутритрубного устройства, так как для выставления платформы на колеса, после ее опрокидывания, необходимо взаимное вращение каждой из трех осей шасси относительно друг друга.
Целью настоящего изобретения является создание универсальной платформы на магнитных колесах для внутритрубных устройств, позволяющей:
- обеспечивающей ее точное позиционирование относительно интересующего объекта без дополнительного маневрирования;
- использовать только одну видеокамеру для визуального контроля состояния внутренней поверхности трубопровода (спереди, сзади, сбоку);
- самостоятельно вставать на колеса после возможного опрокидывания в трубе и позволяющей устанавливать на нее единый блок с оборудованием, что позволяет сделать его более компактным и удобным для внутреннего монтажа;
- осуществлять маневрирование в сложной трубопроводной обвязке с Ду≥300 мм.
Сущность настоящего изобретения заключается в том, что заявленная универсальная платформа на магнитных колесах для внутритрубных устройств, содержащая шасси, магнитные мотор-колесные модули, согласно изобретения, дополнительно содержит поворотный механизм грузовой платформы, который обеспечивает возможность поворота размещенного на ней блока с оборудованием на заданный угол до 360°, каждый из мотор-колесных модулей имеет независимую подпружиненную подвеску и поворотный механизм на заданный угол до 90°, что позволяет универсальной платформе, лишь за счет поворота на заданные углы мотор-колесных модулей и блока с оборудованием, без дополнительного маневрирования и разворотов, осуществлять ее точное позиционирование относительно интересующего объекта, заезжать в боковые отводы, совершать в трубе движение по кольцу и спирали, а для обеспечения действий по постановке универсальной платформы на магнитные колеса, после падения ее в трубе, она обеспечена радиусной поверхностью крыши блока с оборудованием, которая обеспечивает ее падение на боковую поверхность, а также поворотными механизмами грузовой платформы и мотор-колесных модулей, обеспечивающими их оптимальные положения для выполнения данной операции.
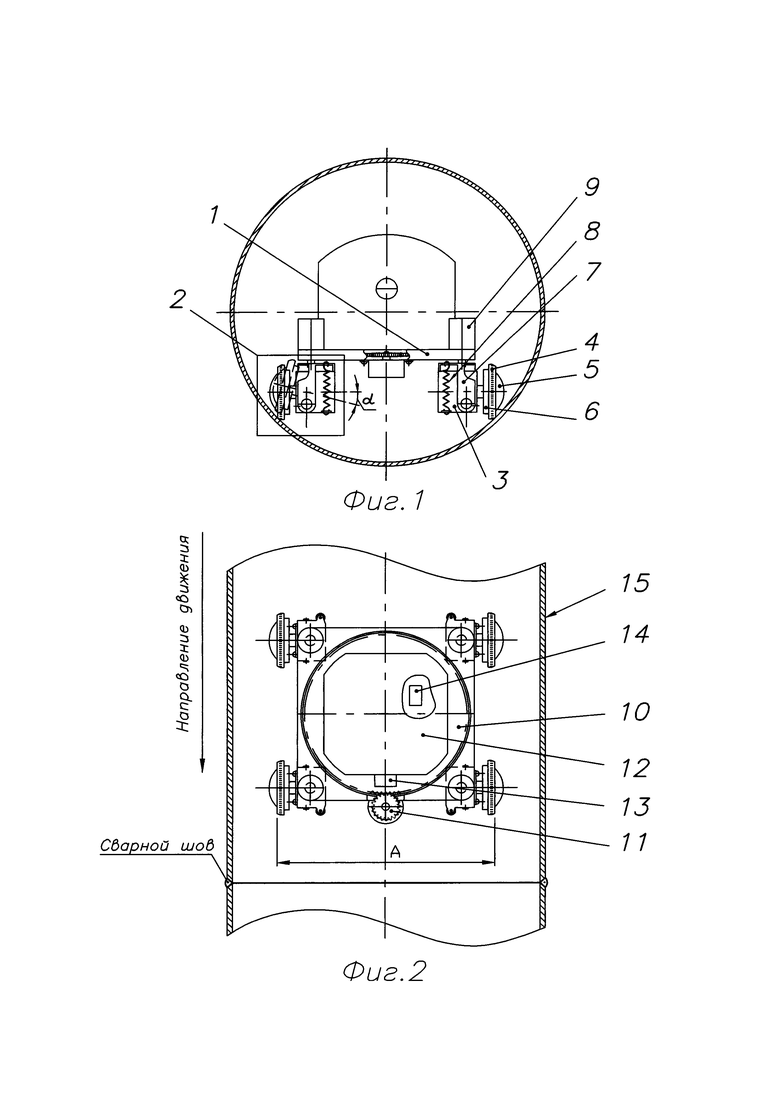
На фиг. 1, 2 показана универсальная платформа на магнитных колесах для внутритрубных устройств, где:
1 - шасси;
2 - мотор-колесный модуль;
3 - мотор-редуктор;
4 - колесо;
5 - немагнитная накладка;
6 - кольцевой магнит;
7 - кронштейн;
8 - пружина растяжения;
9 - поворотный механизм
10 - грузовая платформа;
11 - поворотный механизм;
12 - блок с оборудованием;
13 - видеокамера;
14 - блок ориентации;
15 - труба.
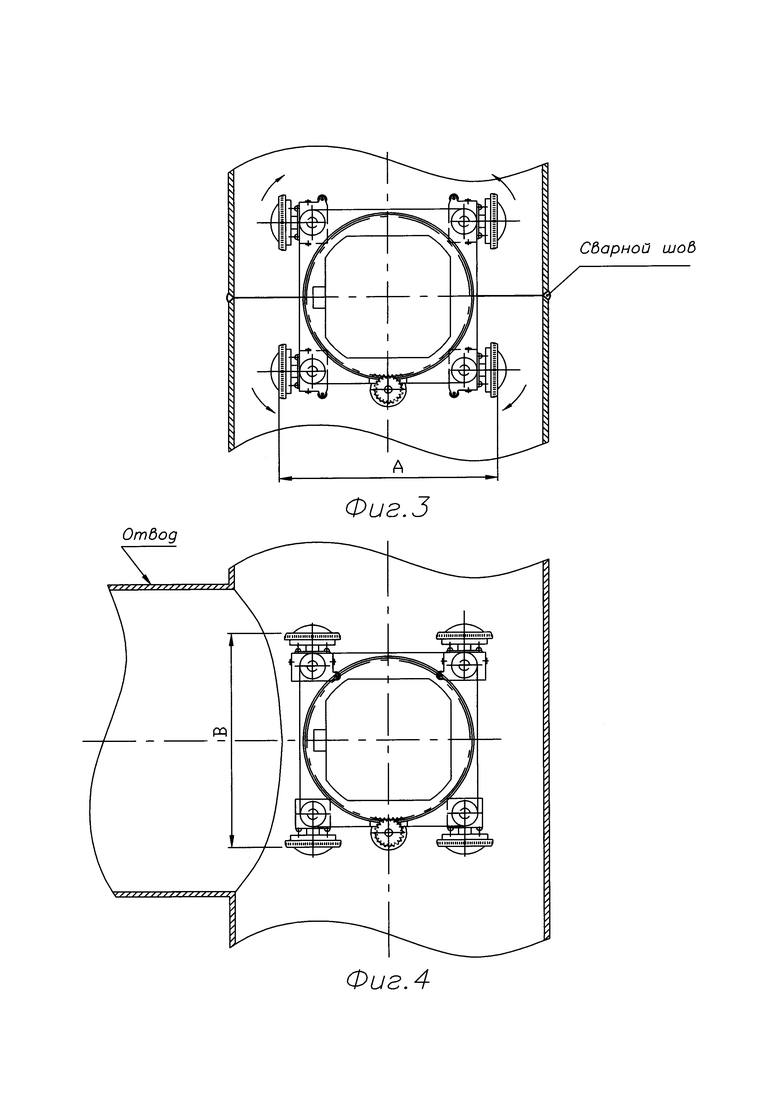
На фиг. 3-4 показан порядок позиционирования универсальной платформы на магнитных колесах для внутритрубных устройств относительно интересующего объекта.
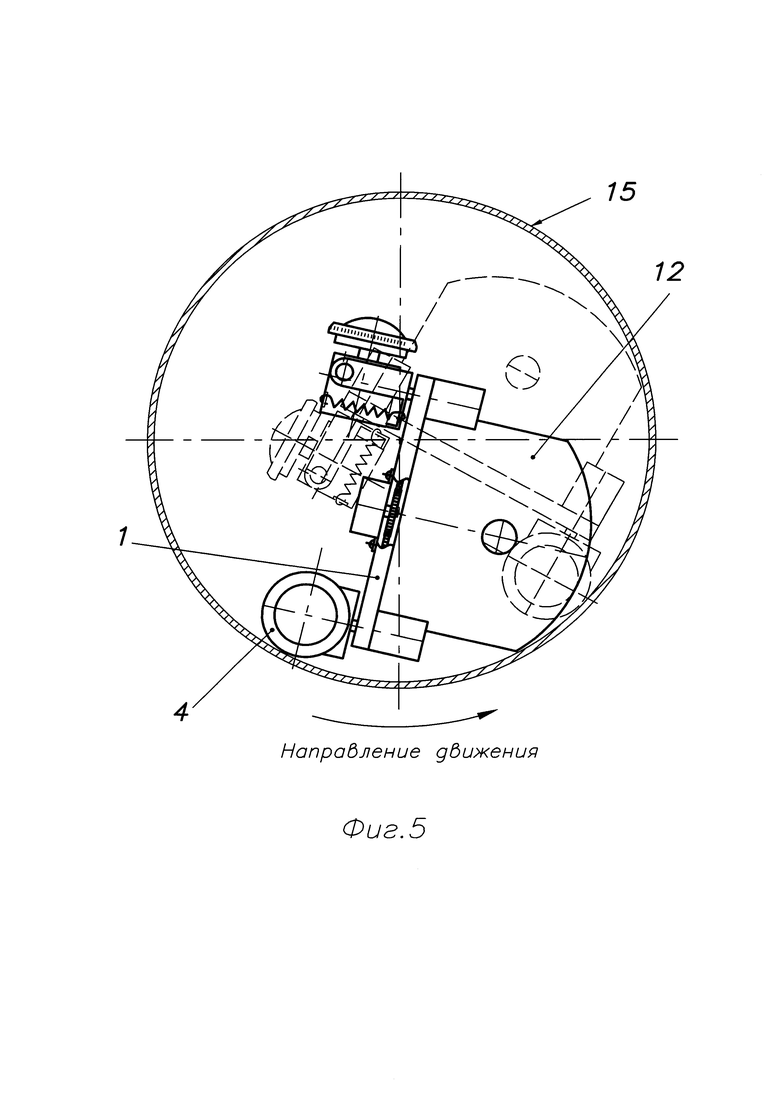
На фиг. 5 показана последовательность действий по постановке на колеса универсальной платформа на магнитных колесах для внутритрубных устройств при ее падении в трубе.
Универсальная платформа на магнитных колесах для внутритрубных устройств состоит из шасси 1, на котором установлены четыре подпружиненных мотор-колесных модуля 2, каждый и которых состоит из мотор-редуктора 3, колеса 4, немагнитной накладки 5, кольцевого магнита 6, кронштейна 7 и пружины растяжения 8. Мотор-редуктор 3 шарнирно закреплен на кронштейне 7 и поджат к нему пружиной растяжения 8. Кронштейны 7 установлены на вертикальных выходных валах поворотных механизмов 9, которые установлены на шасси 1. На шасси 1 также установлена грузовая платформа 10 с поворотным механизмом 11, на которой установлен блок с оборудованием 12, видеокамера 13 и блок ориентации 14.
Заявляемая универсальная платформа на магнитных колесах работает следующим образом.
Универсальная платформа на магнитных колесах для внутритрубных устройств устанавливается на внутреннюю поверхность трубы 15 (стальной). Кольцевые магниты 6 через колеса 4, изготовленные из электротехнической стали с высокими магнитными свойствами, обеспечивают примагничивание изделия к обследуемой трубе 15. Подпружиненные мотор-колесные модули 2 обеспечивают полное прилегание всех колес 4 к криволинейной поверхности трубы 15 при прямолинейном движении и незначительном подруливании, для этого достаточно имеющегося угла вращения а подпружиненных мотор-колесных модулей 2 (см. фиг. 1). Подруливание осуществляется передней парой колес 4 поворотом подпружиненных мотор-колесных модулей 2 с помощью поворотных механизмов 9.
Поворотный механизм 11 грузовой платформы 10 обеспечивает возможность поворота размещенного на ней блока с оборудованием 12 и видеокамерой 13 на заданный угол (до 360°), каждый из мотор-колесных модулей 2 имеет поворотный механизм 9 на заданный угол (до 90°), что позволяет универсальной платформе осуществлять ее точное позиционирование относительно интересующего объекта, без дополнительного маневрирования и разворотов, заезжать в боковые отводы, совершать в трубе кольцевое движение и по спирали лишь за счет поворота на заданные углы мотор-колесных модулей 2 и блока с оборудованием 12, при этом сама универсальная платформа на магнитных колесах для внутритрубных устройств не меняет своего положения относительно оси трубы 15. Для обеспечения точности позиционирования и обеспечения движения по заданной траектории все электродвигатели выше указанных механизмов должны быть шаговыми.
На фиг. 3 показан вариант обследования сварного шва, при котором оператор универсальной платформы на магнитных колесах для внутритрубных устройств, с помощью видеокамеры 13 обнаружив сварной шов, дает команду на поворот блока с оборудованием 12 на 90°, при этом продолжается движение вперед до попадания сварного шва в перекрестие объектива видеокамеры 13. Универсальная платформа останавливается, каждый мотор колесный модуль 2 поворачиваются по стрелкам на 90° (см. фиг. 3), и далее она совершает кольцевое движение в трубе 15, при этом осуществляется визуальный контроль сварного шва либо иной вид его контроля с помощью специальных датчиков. После проведенного контроля мотор-колесные модули 2 и блок с оборудованием 12 возвращаются в исходное положение. Стоит отметить, что габаритные размеры универсальной платформы на магнитных колесах для внутритрубных устройств при выше указанных манипуляция не меняются (размеры А и Б равны - см. фиг. 3, 4), она может совершать спиральные перемещения в трубе 15 (повернув мотор-колесные модули 2 на заданный угол), заезжать в отводы (см. фиг. 4) и так далее.
При падении в трубе 15 универсальной платформы на магнитных колесах для внутритрубных устройств, благодаря наличию радиусной поверхности на крыше блока с оборудованием 12, она опрокинется на одну из боковых поверхностей. Далее универсальную платформу необходимо привести в положение в соответствии с фиг. 5. Если шасси 1 расположено вдоль оси трубы 15, то оператор, ориентируясь на показания блока ориентации 14, поворачивает два опорных колеса 4 поперек оси трубы. Далее опорные колеса 4 (см. фиг. 5) вращаются по часовой стрелке и поднимают универсальную платформу на магнитных колесах для внутритрубных устройств до опрокидывания ее на четыре колеса 4, т.е. до тех пор, пока ее центр тяжести не сместится левее опорной оси. Далее оператор возвращает колеса 4 в штатное положение, после чего универсальная платформа на магнитных колесах для внутритрубных устройств готова к продолжению работ в штатном режиме. Следует отметить, что наличие радиусной поверхности на крыше блока с оборудованием 12 существенно облегчает подъем и исключает зацепы, например, за наплывы сварного шва.
Если шасси 1 расположено поперек оси трубы 15, то оператор, ориентируясь на показания блока ориентации 14, разворачивает два опорных колеса 4 вдоль оси трубы 15 и, вращая их в противоположные стороны, разворачивает шасси 1 вдоль оси трубы 15, т.е. до положения, соответствующего фиг. 5. Дальнейшие действия оператора - см. выше.
Наличие на колесах 4 немагнитных накладок 5 позволяет уменьшить крутящий момент при выполнении операции по постановке универсальной платформы на колеса, так как при ее опрокидывании на бок исключается примагничивание колес 4 к трубе 15.
Предлагаемая универсальная платформа на магнитных колесах для внутритрубных устройств является оптимальной для построения на ее базе внутритрубных дефектоскопов и других устройств, а возможность самостоятельно вставать на колеса исключает возникновение внештатных ситуаций во время проведения диагностических работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНАЯ ПЛАТФОРМА НА МАГНИТНЫХ КОЛЕСАХ ДЛЯ ВНУТРИТРУБНЫХ УСТРОЙСТВ | 2019 |
|
RU2730561C1 |
| УНИВЕРСАЛЬНАЯ ПЛАТФОРМА НА МАГНИТНЫХ КОЛЁСАХ ДЛЯ ВНУТРИТРУБНЫХ УСТРОЙСТВ | 2016 |
|
RU2644432C2 |
| ПЛАТФОРМА ДЛЯ ВНУТРИТРУБНОГО ДЕФЕКТОСКОПА НА МАГНИТНЫХ КОЛЁСАХ | 2015 |
|
RU2605234C1 |
| ПЛАТФОРМА ДЛЯ ВНУТРИТРУБНОГО ДЕФЕКТОСКОПА НА МАГНИТНЫХ КОЛЁСАХ | 2016 |
|
RU2647173C2 |
| РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ МОБИЛЬНОГО РОБОТИЗИРОВАННОГО РЕМОНТНО-ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА | 2023 |
|
RU2806129C1 |
| Глобальная логистическая система, включающая модули для перемещения людей, систему транспортировки грузов и используемые в ней транспортные средства | 2020 |
|
RU2743800C1 |
| Базовая платформа автономного интеллектуального робототехнического комплекса (АИРТК) | 2021 |
|
RU2764910C1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2418234C1 |
| АВТОНОМНАЯ МОБИЛЬНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА ДЛЯ ОЧИСТКИ СНЕГА | 2019 |
|
RU2730666C1 |
| АВТОНОМНОЕ ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО | 2015 |
|
RU2576746C1 |
Изобретение относится к трубопроводному транспорту и может быть использовано при создании устройств внутритрубной диагностики, а также иных устройств, используемых при строительстве и капитальном ремонте объектов, имеющих трубопроводную обвязку. Целью настоящего изобретения является создание универсальной платформы на магнитных колесах для внутритрубных устройств, позволяющей: самостоятельно вставать на колеса после возможного опрокидывания в трубе и позволяющей устанавливать на нее единый блок внутритрубного устройства, что позволяет сделать его более компактным и удобным для внутреннего монтажа; осуществлять маневрирование в сложной трубопроводной обвязке с Ду≥300 мм. Предлагаемая платформа содержит шасси, магнитные мотор-колесные модули, поворотный механизм грузовой платформы, который обеспечивает возможность поворота размещенного на ней блока с оборудованием на заданный угол до 360°. Каждый из мотор-колесных модулей имеет независимую подпружиненную подвеску и поворотный механизм на заданный угол до 90°. Это позволяет платформе осуществлять ее точное позиционирование относительно интересующего объекта без дополнительного маневрирования и разворотов, заезжать в боковые отводы, совершать в трубе кольцевое движение и по спирали лишь за счет поворота на заданные углы мотор-колесных модулей и блока с оборудованием. Радиусная поверхность крыши блока с оборудованием, а также поворотные механизмы грузовой платформы и мотор-колесных модулей обеспечивают оптимальные положения для постановки универсальной платформы на магнитные колеса после падения ее в трубе. Предлагаемая универсальная платформа на магнитных колесах для внутритрубных устройств является оптимальной для построения на ее базе внутритрубных дефектоскопов и других устройств, а возможность самостоятельно вставать на колеса исключает возникновение внештатных ситуаций во время проведения диагностических работ. 5 ил.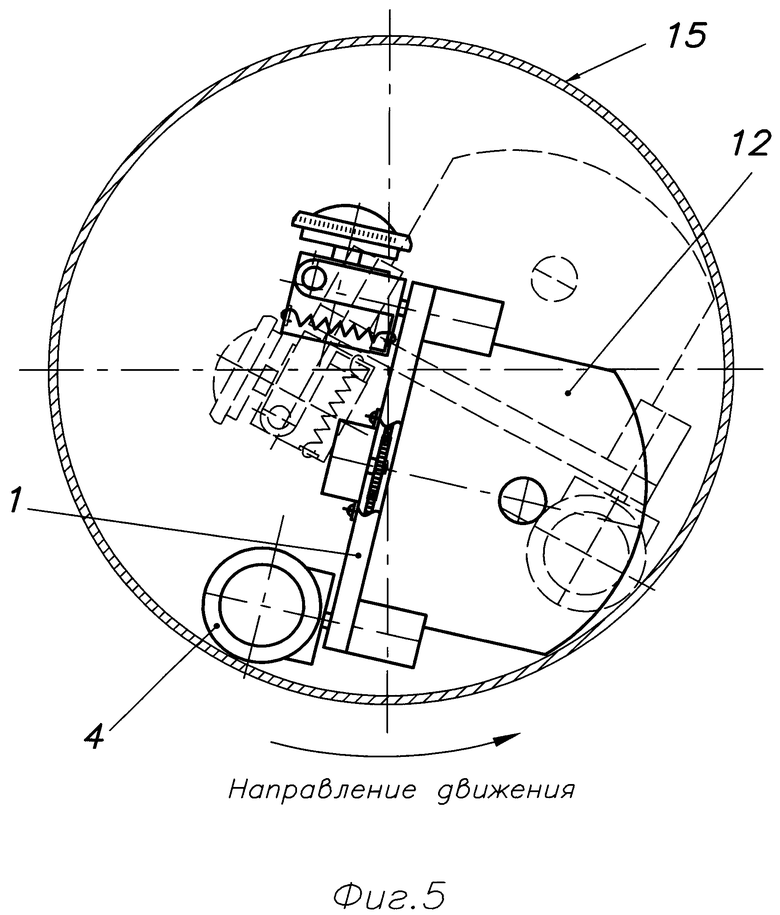
Универсальная платформа на магнитных колесах для внутритрубных устройств, содержащая шасси, магнитные мотор-колесные модули, отличающаяся тем, что дополнительно содержит поворотный механизм грузовой платформы, который обеспечивает возможность поворота размещенного на ней блока с оборудованием на заданный угол до 360°, каждый из мотор-колесных модулей имеет независимую подпружиненную подвеску и поворотный механизм на заданный угол до 90°, что позволяет универсальной платформе лишь за счет поворота на заданные углы мотор-колесных модулей и блока с оборудованием, без дополнительного маневрирования и разворотов осуществлять ее точное позиционирование относительно интересующего объекта, заезжать в боковые отводы, совершать в трубе движение по кольцу и спирали, а для обеспечения действий по постановке универсальной платформы на магнитные колеса, после падения ее в трубе, она обеспечена радиусной поверхностью крыши блока с оборудованием, которая обеспечивает ее падение на боковую поверхность, а также поворотными механизмами грузовой платформы и мотор-колесных модулей, обеспечивающими их оптимальные положения для выполнения данной операции.
| ПЛАТФОРМА ДЛЯ ВНУТРИТРУБНОГО ДЕФЕКТОСКОПА НА МАГНИТНЫХ КОЛЁСАХ | 2015 |
|
RU2605234C1 |
| УНИВЕРСАЛЬНАЯ ПЛАТФОРМА НА МАГНИТНЫХ КОЛЁСАХ ДЛЯ ВНУТРИТРУБНЫХ УСТРОЙСТВ | 2016 |
|
RU2644432C2 |
| ПЛАТФОРМА ДЛЯ ВНУТРИТРУБНОГО ДЕФЕКТОСКОПА НА МАГНИТНЫХ КОЛЁСАХ | 2016 |
|
RU2647173C2 |
| ДВУХВАЛЬНАЯ ГАЗОТУРБИННАЯ УСТАНОВКА | 0 |
|
SU171697A1 |
| ВИЬЛНОТЕК.Д | 0 |
|
SU179032A1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2007 |
|
RU2347974C1 |

