Изобретение относится к трубопроводному транспорту и может быть использовано для внутритрубной диагностики при строительстве и капитальном ремонте объектов, имеющих трубопроводную обвязку.
В настоящее время для внутритрубной диагностики используются как традиционные внутритрубные снаряды-дефектоскопы, так и автономные роботизированные сканеры-дефектоскопы [1] (материалы ЗАО ИнтроСкан Технолоджи: «Развитие средств мониторинга технического состояния технологических трубопроводов компрессорных станций ОАО «Газпром», с применением автономного роботизированного сканера-дефектоскопа А2072 «IntroScan»», представленные на 33-м тематическом семинаре «Диагностика оборудования и трубопроводов компрессорных станций», в г. Светлогорск, 8-12 сентября 2014 г.).
Внутритрубные снаряды движутся в трубе под действием потока газа, при этом труба не должна менять проходное сечение. Такие устройства могут быть использованы только на действующих магистральных газопроводах.
Наиболее близкими по технической сущности и достигаемому результату к заявляемому изобретению являются платформы автономного роботизированного сканера-дефектоскопа А2072 «IntroScan» [2] (материалы ЗАО ИнтроСкан Технолоджи: «Развитие средств мониторинга технического состояния технологических трубопроводов компрессорных станций ОАО «Газпром», с применением автономного роботизированного сканера-дефектоскопа А2072 «IntroScan»», представленные на 33-м тематическом семинаре «Диагностика оборудования и трубопроводов компрессорных станций», в г. Светлогорск, 8-12 сентября 2014 г., прототип v3.1). Платформа сканера-дефектоскопа обеспечивает его передвижение по произвольной траектории, исключая наиболее загрязненные участки внутренней полости трубопровода и, как следствие, отсутствие необходимости проведения очистных мероприятий перед проведением внутритрубной диагностики. Магнитные мотор-колесные модули платформ обеспечивают прохождение сканеров-дефектоскопов по внутренней полости трубы и по элементам различного сортамента (трубы, отводы, тройники, переходы, ЗРА) Ду 300-1400 мм.
Недостатками данной платформы являются:
- автомобильная схема поворота известных платформ исключает заявленную возможность маневрирования в тройниках с Ду 300 мм из-за наличия значительного радиуса поворота и габаритов самих платформ;
- невозможность преодоления вертикальных препятствий из-за конфигурации платформы.
Целью настоящего изобретения является создание малогабаритной платформы для внутритрубного дефектоскопа на магнитных колесах, позволяющей:
- осуществлять неограниченное маневрирование в сложной трубопроводной обвязке с Ду≥200 мм;
- преодолевать вертикальные препятствия трубопроводной обвязки без оснащения платформы механизмом отключения магнитного поля колес.
Сущность настоящего изобретения заключается в том, что заявленная платформа для внутритрубного дефектоскопа на магнитных колесах, содержащая магнитные мотор-колесные модули, согласно изобретению оснащена магнитными колесами с немагнитными вставками, размещенными по периметру колес, которые обеспечивают переменную силу примагничивания колес платформы для внутритрубного дефектоскопа к обследуемой поверхности трубопроводной обвязки, что позволяет ей преодолевать вертикальные препятствия в виде внутренних углов.
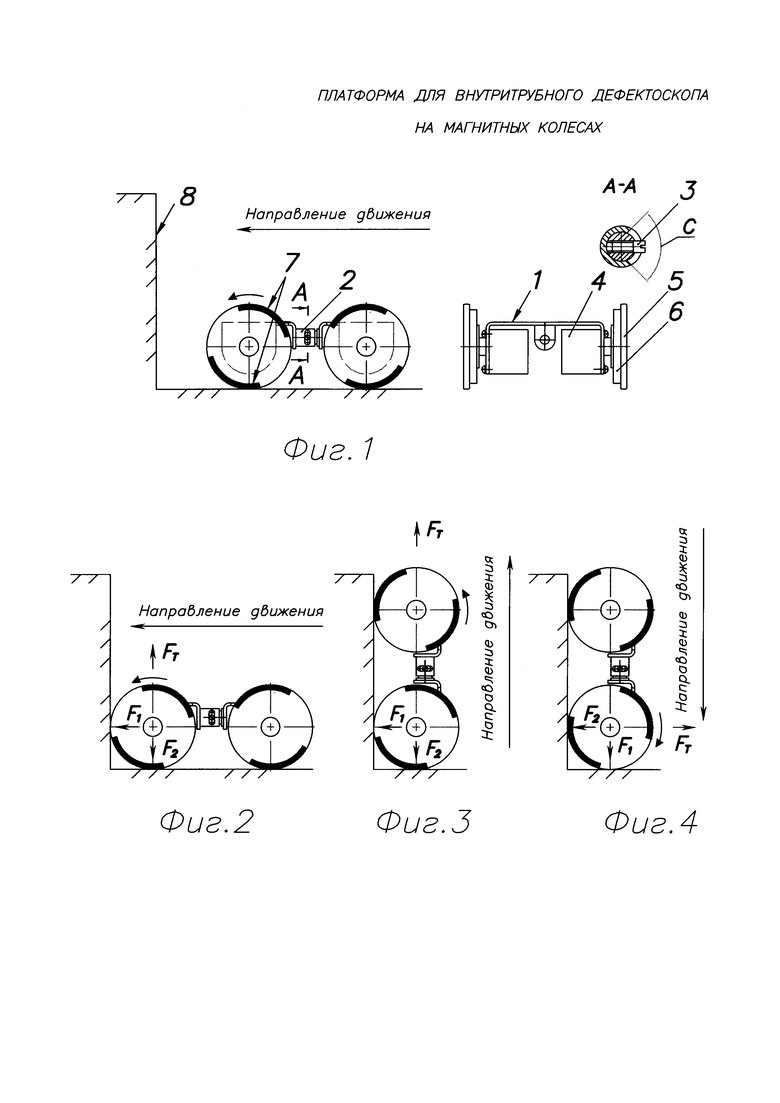
На фиг. 1 показана платформа для внутритрубного дефектоскопа на магнитных колесах, где:
1 - шасси;
2 - продольная ось;
3 - упор;
4 - мотор-редуктор;
5 - колесо;
6 - кольцевой магнит;
7 - немагнитные вставки;
8 - вертикальное препятствие.
Платформа для внутритрубного дефектоскопа на магнитных колесах конструктивно состоит из 2-х шасси 1, соединенных между собой шарнирной продольной осью 2 с упором 3, ограничивающим вращение шасси 1 относительно друг друга в рамках заданного сектора С. На шасси 1 установлены мотор-редукторы 4, на оси которых установлены колеса 5 и кольцевые магниты 6. Колеса 5 платформы для внутритрубного дефектоскопа оснащены немагнитными вставками 7, равномерно размещенными по периметру.
Заявляемая платформа для внутритрубного дефектоскопа на магнитных колесах работает следующим образом.
Платформа устанавливается на внутреннюю поверхность стальной трубы подлежащей диагностическому обследованию. Кольцевые магниты 6 через колеса 5, изготовленные из электротехнической стали с высокими магнитными свойствами, обеспечивают примагничивание платформы к обследуемой стальной трубе. Наличие шарнирной продольной оси 2 с упором 3, ограничивающим вращение шасси 1 относительно друг друга в рамках заданного сектора С, обеспечивает полное прилегание всех колес 5 платформы к криволинейной поверхности. Затем на мотор-редукторы 4 подается электропитание. При вращении колес 5 платформы в одну сторону (против часовой стрелки, см. фиг. 1) платформа движется вперед. При смене вращения на противоположное - назад. Вращение левых и правых колес 5 в противоположные стороны обеспечивает вращение платформы на месте. При упоре платформы в вертикальное препятствие 8 происходит проскальзывание колес 5 до тех пор, пока немагнитные вставки 7 передних колес 5 не займут положение, соответствующее изображенному на фиг. 2. В этом положении за счет наличия немагнитной вставки 7, сила примагничивания передних колес 5 к вертикальной поверхности препятствия 8 F1 больше силы их примагничивания к горизонтальной поверхности F2. Тяговое усилие Fт передних колес вверх по вертикальному препятствию 8 определяется формулой:
Fт=kсц*F1,
где kсц - коэффициент сцепления колеса с опорной поверхностью;
F1 - сила примагничивания.
При соблюдении условия Fт>F2 передние колеса 5 платформы начинают движение вверх по вертикальному препятствию 8. Задние колеса 5, также оснащенные немагнитными вставками 7, после упора в вертикальное препятствие 8 проскальзывают до тех пор, пока немагнитные вставки 7 задних колес 5 не займут положение, соответствующее изображенному на фиг 3. Таким образом платформа преодолевает вертикальное препятствие 8. Спуск с вертикального препятствия 8 осуществляется аналогично, при этом при упоре передних, а затем и задних колес 5 в горизонтальный участок немагнитные вставки, благодаря проскальзыванию колес 5, должны соответствовать фиг. 4
Следует отметить, что кольцевые магниты 6 следует подбирать с таким расчетом, чтобы их усилия хватало на удержание платформы в любом ее положении на обследуемом объекте несмотря на наличие на передних колесах 5 немагнитных вставок 7.
Отсутствие в конструкции платформы дополнительного механизма отключения магнитного поля оставляет дополнительное место для размещения на платформе технологического оборудования, а кинематика обеспечивает неограниченное маневрирование в сложной трубопроводной обвязке.
Предлагаемая платформа является оптимальной для построения на ее базе малогабаритных внутритрубных дефектоскопов, а также других технологических устройств, применяемых в различных отраслях народного хозяйства.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Материалы ЗАО ИнтроСкан Технолоджи: «Развитие средств мониторинга технического состояния технологических трубопроводов компрессорных станций ОАО «Газпром», с применением автономного роботизированного сканера-дефектоскопа А2072 «IntroScan»», представленные на 33-м тематическом семинаре «Диагностика оборудования и трубопроводов компрессорных станций», в г. Светлогорск, 8-12 сентября 2014 г.
2. Материалы ЗАО ИнтроСкан Технолоджи: «Развитие средств мониторинга технического состояния технологических трубопроводов компрессорных станций ОАО «Газпром», с применением автономного роботизированного сканера-дефектоскопа А2072 «IntroScan»», представленные на 33-м тематическом семинаре «Диагностика оборудования и трубопроводов компрессорных станций», в г. Светлогорск, 8-12 сентября 2014 г., прототип v3.1.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАТФОРМА ДЛЯ ВНУТРИТРУБНОГО ДЕФЕКТОСКОПА НА МАГНИТНЫХ КОЛЁСАХ | 2015 |
|
RU2605234C1 |
| УНИВЕРСАЛЬНАЯ ПЛАТФОРМА НА МАГНИТНЫХ КОЛЁСАХ ДЛЯ ВНУТРИТРУБНЫХ УСТРОЙСТВ | 2016 |
|
RU2644432C2 |
| УНИВЕРСАЛЬНАЯ ПЛАТФОРМА НА МАГНИТНЫХ КОЛЕСАХ ДЛЯ ВНУТРИТРУБНЫХ УСТРОЙСТВ | 2019 |
|
RU2730561C1 |
| УНИВЕРСАЛЬНАЯ ПЛАТФОРМА НА МАГНИТНЫХ КОЛЕСАХ ДЛЯ ВНУТРИТРУБНЫХ УСТРОЙСТВ | 2020 |
|
RU2739853C1 |
| Устройство для внутритрубной роботизированной механической очистки поверхности трубопроводов | 2024 |
|
RU2837919C1 |
| ВНУТРИТРУБНЫЙ ДИАГНОСТИЧЕСКИЙ СНАРЯД С УСТРОЙСТВОМ ЗАЩИТЫ ОБЪЕКТИВА ВИДЕОКАМЕРЫ ОТ ЗАГРЯЗНЕНИЙ | 2020 |
|
RU2739721C1 |
| Способ внутритрубной диагностики и устройство для его осуществления (варианты) | 2021 |
|
RU2766370C1 |
| Способ акустического контроля трубопровода | 2024 |
|
RU2826796C1 |
| АДАПТИВНАЯ КОЛЕСНАЯ ОПОРА ТРАНСПОРТНОГО МОДУЛЯ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2023 |
|
RU2821671C1 |
| Многофункциональный автономный роботизированный комплекс диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры | 2020 |
|
RU2733907C1 |
Изобретение относится к трубопроводному транспорту и может быть использовано для внутритрубной диагностики при строительстве и капитальном ремонте объектов, имеющих трубопроводную обвязку. Целью настоящего изобретения является создание малогабаритной платформы для внутритрубного дефектоскопа на магнитных колесах, позволяющей осуществлять неограниченное маневрирование в сложной трубопроводной обвязке с Ду≥200 мм и преодолевать вертикальные препятствия трубопроводной обвязки без оснащения платформы механизмом отключения магнитного поля колес. Платформа для внутритрубного дефектоскопа на магнитных колесах содержит магнитные мотор-колесные модули и дополнительно оснащена магнитными колесами с немагнитными вставками, размещенными по периметру колес, которые обеспечивают переменную силу примагничивания колес платформы для внутритрубного дефектоскопа к обследуемой поверхности трубопроводной обвязки, что позволяет ей преодолевать вертикальные препятствия в виде внутренних углов. Предлагаемая платформа является оптимальной для построения на ее базе малогабаритных внутритрубных дефектоскопов, а также других технологических устройств, применяемых в различных отраслях народного хозяйства. 4 ил.
Платформа для внутритрубного дефектоскопа на магнитных колесах, содержащая магнитные мотор-колесные модули, отличающаяся тем, что оснащена магнитными колесами с немагнитными вставками, размещенными по периметру колес, которые обеспечивают переменную силу примагничивания колес платформы для внутритрубного дефектоскопа к обследуемой поверхности трубопроводной обвязки, что позволяет ей преодолевать вертикальные препятствия в виде внутренних углов.
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ФЕРРОМАГНИТНЫМ ПОВЕРХНОСТЯМ | 1992 |
|
RU2051058C1 |
| Самоходная тележка | 1975 |
|
SU540716A1 |
| Способ эксплуатации синхронного генератора передвижных электростанций | 1958 |
|
SU117568A1 |
| Самоходное магнитное устройство | 1978 |
|
SU774878A1 |
| 0 |
|
SU158686A1 |

