Изобретение относится к трубопроводному транспорту и может быть использовано при создании устройств внутритрубной диагностики, а также иных устройств, используемых при строительстве и капитальном ремонте объектов, имеющих трубопроводную обвязку.
В настоящее время для внутритрубной диагностики используются как традиционные внутритрубные снаряды-дефектоскопы, так и автономные роботизированные сканеры-дефектоскопы [1] (Материалы ЗАО ИнтроСкан Технолоджи: «Развитие средств мониторинга технического состояния технологических трубопроводов компрессорных станций ОАО «Газпром», с применением автономного роботизированного сканера-дефектоскопа А2072 «IntroScan»», представленные на 33-м тематическом семинаре «Диагностика оборудования и трубопроводов компрессорных станций», в г. Светлогорск, 8-12 сентября 2014 г.).
Внутритрубные снаряды движутся в трубе под действием потока газа, при этом труба не должна менять проходное сечение. Такие устройства могут быть использованы только на действующих магистральных газопроводах.
Наиболее близким по технической сущности и достигаемому результату к заявляемому изобретению являются платформы автономного роботизированного сканера-дефектоскопа A2072 «IntroScan» [2] (Материалы ЗАО ИнтроСкан Технолоджи: «Развитие средств мониторинга технического состояния технологических трубопроводов компрессорных станций ОАО «Газпром», с применением автономного роботизированного сканера-дефектоскопа А2072 «IntroScan»», представленные на 33-м тематическом семинаре «Диагностика оборудования и трубопроводов компрессорных станций», в г. Светлогорск, 8-12 сентября 2014 г., прототипы v1.0, v2.0 и v3.1).
Платформы сканеров-дефектоскопов обеспечивают их передвижение по произвольной траектории, исключая наиболее загрязненные участки внутренней полости трубопровода и, как следствие, отсутствие необходимости проведения очистных мероприятий перед проведением внутритрубной диагностики. Магнитные мотор-колесные модули платформ обеспечивают прохождение сканеров-дефектоскопов по внутренней полости стальной трубы и по элементам различного сортамента (трубы, отводы, тройники, переходы, ЗРА) Ду 300-1400 мм.
Недостатками данных платформ являются:
- автомобильная схема поворота известных платформ исключает заявленную возможность маневрирования в тройниках с Ду 300 мм из-за наличия значительного радиуса поворота и габаритов самих платформ;
- для каждого прототипа сканера-дефектоскопа A2072 «IntroScan», в зависимости от его назначения, разработана индивидуальная платформа на магнитных колесах.
Целью настоящего изобретения является создание универсальной платформы на магнитных колесах для внутритрубных устройств, позволяющей:
- осуществлять неограниченное маневрирование в сложной трубопроводной обвязке за счет изменяемой геометрии универсальной платформы на магнитных колесах;
- обеспечить разворот универсальной платформы на магнитных колесах на месте за счет вращения левых и правых колес в противоположные стороны, при этом обеспечивая контакт всех четырех колес с криволинейной опорной поверхностью.
Сущность настоящего изобретения заключается в том, что заявленная универсальная платформа на магнитных колесах для внутритрубных устройств, содержащая магнитные мотор-колесные модули, согласно изобретению дополнительно содержит рычажный подъемный механизм, установленный на ее передней оси и шарнирно соединенный с подъемной грузовой платформой, обеспечивающий оптимальную геометрию универсальной платформы на магнитных колесах для маневрирования в трубопроводной обвязке, а также контакт всех четырех колес с криволинейной опорной поверхностью, при этом рычажный подъемный механизм обеспечивает оптимальное, регулируемое расстояние рабочего органа внутритрубного устройства, установленного на грузовой платформе, от поверхности трубы при выполнении диагностических и других видов работ.
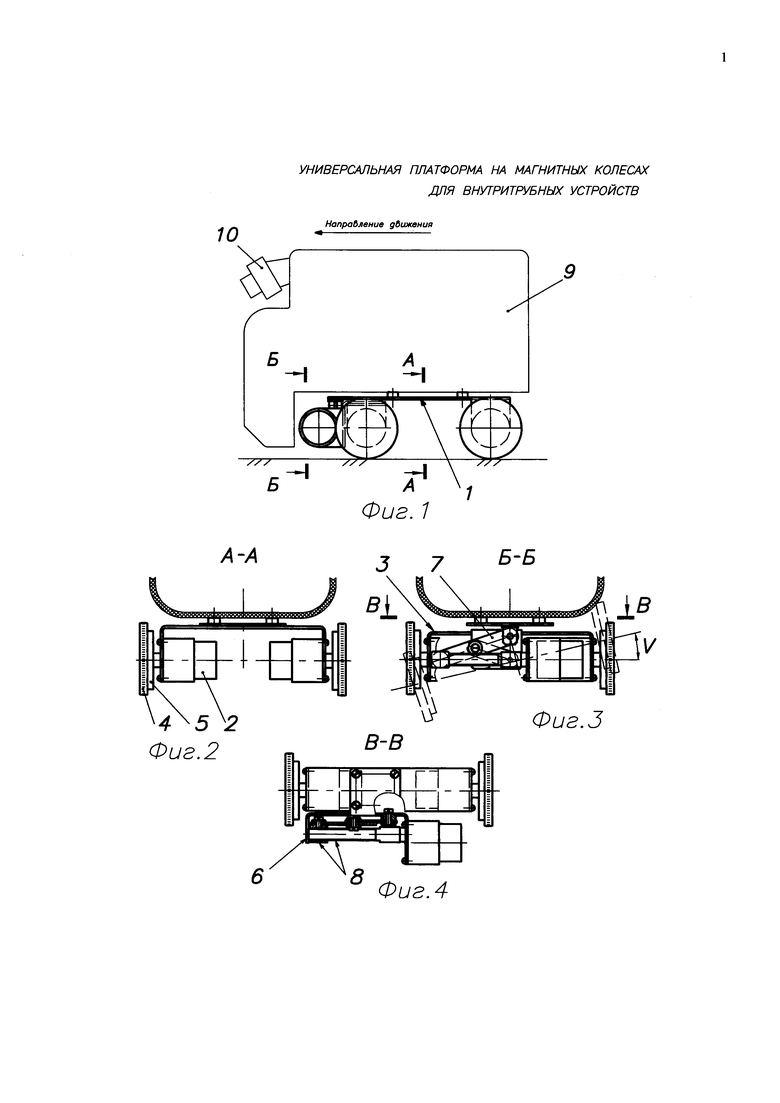
На фиг. 1, 2, 3, 4 показана универсальная платформа на магнитных колесах для внутритрубных устройств, где:
1 - подъемная грузовая платформа;
2 - мотор-редуктор;
3 - передняя ось;
4 - колесо;
5 - кольцевой магнит;
6 - рычажный подъемный механизм;
7 - силовой рычаг;
8 - винтовая пара;
9 - внутритрубное устройство;
10 - видеокамера.
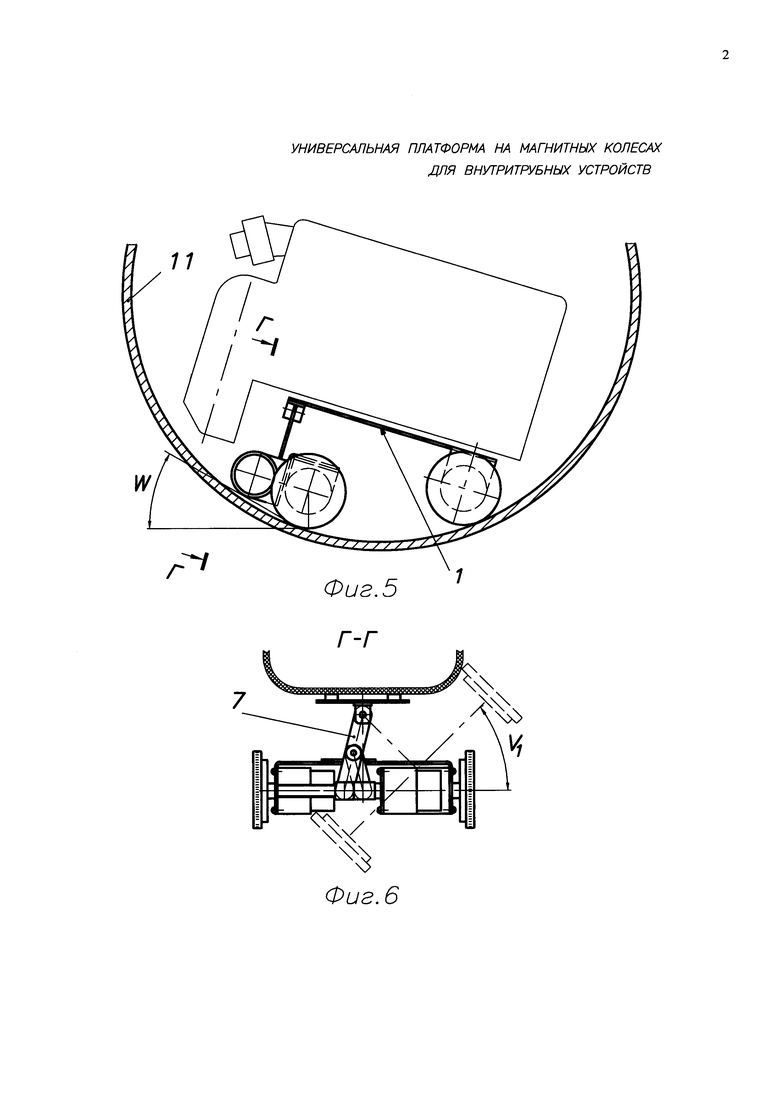
На фиг. 5 показана универсальная платформа на магнитных колесах при движении в поперечном сечении трубы с поднятой подъемной грузовой платформой 1, где:
11 - стальная труба.
На фиг. 6 показан рычажный подъемный механизм 6 с силовым рычагом 7 в поднятом положении.
Универсальная платформа на магнитных колесах для внутритрубных устройств состоит из подъемной грузовой платформы 1 с установленными на ней мотор-редукторами 2 и передней оси 3 с установленными на них мотор-редукторами 2. На оси мотор-редукторов 2 установлены колеса 4 и кольцевые магниты 5. Подъемная грузовая платформа 1 и передняя ось 3 соединены друг с другом рычажным подъемным механизмом 6, жестко закрепленным на передней оси 3, при этом его силовой рычаг 7 шарнирно соединен с подъемной грузовой платформой 1. Рычажный подъемный механизм 6 оснащен мотор-редуктором 2 с винтовой парой 8. Внутритрубное устройство 9 с видеокамерой 10 устанавливается на подъемную грузовую платформу 1.
Заявляемая универсальная платформа на магнитных колесах работает следующим образом.
Универсальная платформа на магнитных колесах с установленным на ней внутритрубным устройством 9 устанавливается на внутреннюю поверхность стальной трубы 11. Кольцевые магниты 5 через колеса 4, изготовленные из электротехнической стали с высокими магнитными свойствами, обеспечивают примагничивание изделия к обследуемой стальной трубе 11. Наличие продольного шарнирного соединения силового рычага 7 с подъемной грузовой платформой 1 обеспечивают полное прилегание всех колес 4 к криволинейной поверхности стальной трубы 11. Затем на мотор-редукторы 2 колес 4 подается электропитание. При вращении колес 4 в одну сторону (против часовой стрелки - см. фиг. 1) изделие движется вперед. При смене вращения на противоположное - назад. Вращение левых и правых колес 4 в противоположные стороны обеспечивает вращение платформы на месте. При движении универсальной платформа на магнитных колесах для внутритрубных устройств, вдоль стальной трубы 11 для прилегания к ее криволинейной поверхности всех четырех колес 4, достаточно имеющегося угла вращения передней оси 3 в поперечном направлении V при опущенном рычажном подъемном механизме 6 (см. фиг. 3).
Во время работы внутритрубного устройства 9, установленного на универсальной платформе на магнитных колесах, его рабочий орган, например диагностический датчик, как правило, находится на минимальном расстоянии от поверхности трубы. Для преодоления препятствий (сварных швов, плавных сужений проходного сечения и т.д.) и поворотов оператор, визуально оценив обстановку с помощью видеокамеры 10, включает мотор-редуктор 2 рычажного подъемного механизма 6, самотормозящаяся винтовая пара 8 через рычажную систему, включающую силовой рычаг 7, приподнимает подъемную грузовую платформу 1. Таким образом, измененные геометрические параметры универсальной платформы на магнитных колесах, увеличенные угол заезда изделия W (см. фиг. 5) и угол вращения передней оси 3 в поперечном направлении V1 (см. фиг. 6), позволяют преодолевать встречные препятствия, разворачиваться в трубе (см. - фиг. 5), заезжать в отводы и т.д., при этом обеспечено прилегание к криволинейной поверхности стальной трубы 11 всех четырех колес 4.
Для обеспечения точного позиционирования рабочего органа внутритрубного устройства 9, установленного на универсальной платформе на магнитных колесах, относительно поверхности стальной трубы 11 его следует оснастить дальномером, а точность позиционирования обеспечит использование сервопривода в качестве мотор-редуктора 2 рычажного подъемного механизма 6.
Предлагаемая универсальная платформа на магнитных колесах является оптимальной для построения на ее базе внутритрубных дефектоскопов и других устройств, а возможность изменять свою геометрию обеспечивает неограниченное маневрирование в сложной трубопроводной обвязке.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Материалы ЗАО ИнтроСкан Технолоджи: «Развитие средств мониторинга технического состояния технологических трубопроводов компрессорных станций ОАО «Газпром», с применением автономного роботизированного сканера-дефектоскопа А2072 «IntroScan»», представленные на 33-м тематическом семинаре «Диагностика оборудования и трубопроводов компрессорных станций», в г. Светлогорск, 8-12 сентября 2014 г.
2. Материалы ЗАО ИнтроСкан Технолоджи: «Развитие средств мониторинга технического состояния технологических трубопроводов компрессорных станций ОАО «Газпром», с применением автономного роботизированного сканера-дефектоскопа А2072 «IntroScan»», представленные на 33-м тематическом семинаре «Диагностика оборудования и трубопроводов компрессорных станций», в г. Светлогорск, 8-12 сентября 2014 г., прототипы v1.0, v2.0 и v3.1.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАТФОРМА ДЛЯ ВНУТРИТРУБНОГО ДЕФЕКТОСКОПА НА МАГНИТНЫХ КОЛЁСАХ | 2016 |
|
RU2647173C2 |
| ПЛАТФОРМА ДЛЯ ВНУТРИТРУБНОГО ДЕФЕКТОСКОПА НА МАГНИТНЫХ КОЛЁСАХ | 2015 |
|
RU2605234C1 |
| УНИВЕРСАЛЬНАЯ ПЛАТФОРМА НА МАГНИТНЫХ КОЛЕСАХ ДЛЯ ВНУТРИТРУБНЫХ УСТРОЙСТВ | 2019 |
|
RU2730561C1 |
| УНИВЕРСАЛЬНАЯ ПЛАТФОРМА НА МАГНИТНЫХ КОЛЕСАХ ДЛЯ ВНУТРИТРУБНЫХ УСТРОЙСТВ | 2020 |
|
RU2739853C1 |
| Устройство для внутритрубной роботизированной механической очистки поверхности трубопроводов | 2024 |
|
RU2837919C1 |
| Способ акустического контроля трубопровода | 2024 |
|
RU2826796C1 |
| ВНУТРИТРУБНЫЙ ДИАГНОСТИЧЕСКИЙ СНАРЯД С УСТРОЙСТВОМ ЗАЩИТЫ ОБЪЕКТИВА ВИДЕОКАМЕРЫ ОТ ЗАГРЯЗНЕНИЙ | 2020 |
|
RU2739721C1 |
| Способ внутритрубной диагностики и устройство для его осуществления (варианты) | 2021 |
|
RU2766370C1 |
| АДАПТИВНАЯ КОЛЕСНАЯ ОПОРА ТРАНСПОРТНОГО МОДУЛЯ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2023 |
|
RU2821671C1 |
| ВНУТРИТРУБНЫЙ РОБОТ ДЛЯ ДИАГНОСТИКИ ТРУБОПРОВОДОВ | 2021 |
|
RU2773721C1 |
Изобретение относится к трубопроводному транспорту и может быть использовано при внутритрубной диагностике. Универсальная платформа на магнитных колесах для внутритрубных устройств содержит магнитные мотор-колесные модули. Дополнительно заявленное устройство содержит рычажный подъемный механизм, установленный на передней оси и шарнирно соединенный с подъемной грузовой платформой, обеспечивающий оптимальную геометрию универсальной платформы на магнитных колесах для маневрирования в трубопроводной обвязке, а также контакт всех четырех колес с криволинейной опорной поверхностью. При этом рычажный подъемный механизм обеспечивает оптимальное, регулируемое расстояние рабочего органа внутритрубного устройства, установленного на грузовой платформе, от поверхности трубы при выполнении диагностических и других видов работ. 6 ил.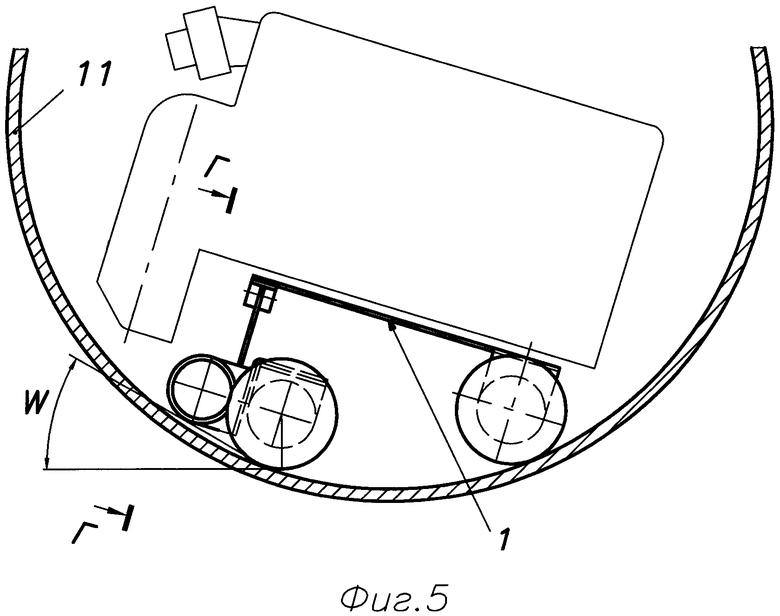
Универсальная платформа на магнитных колесах для внутритрубных устройств, содержащая магнитные мотор-колесные модули, отличающаяся тем, что дополнительно содержит рычажный подъемный механизм, установленный на ее передней оси и шарнирно соединенный с подъемной грузовой платформой, обеспечивающий оптимальную геометрию универсальной платформы на магнитных колесах для маневрирования в трубопроводной обвязке, а также контакт всех четырех колес с криволинейной опорной поверхностью, при этом рычажный подъемный механизм обеспечивает оптимальное, регулируемое расстояние рабочего органа внутритрубного устройства, установленного на грузовой платформе, от поверхности трубы при выполнении диагностических и других видов работ.
| Газовая промышленность, Спецвыпуск "Надежность и ремонт объектов ГТС"; гл | |||
| ред | |||
| Маркелов В.А, ООО "Газоил пресс", М., 2015, 120 с., с.11 | |||
| US 20130105233 A1, 02.05.2013 | |||
| US 4654702 A1, 31.03.1987 | |||
| US 20130024067 A1, 24.01.2013. |

