Изобретение относится к области радиотехники и может быть использовано при создании и модернизации средств определения пространственных координат воздушного судна (ВС).
Известен дальномерный способ навигационных определений (см., например, ГЛОНАСС. Принципы построения и функционирования/ Под. ред. А.И. Перова, В.Н. Харисова. Изд. 3-е, перераб. - М.: Радиотехника, 2005, 688 с. С. 67), который может быть использован для определения пространственных координат ВС. Данный способ основан на пассивных (беззапросных) измерениях дальности между навигационными спутниками спутниковой радионавигационной системы и потребителем путем обработки навигационной аппаратурой потребителя (НАП) информации, содержащейся в спутниковых радиосигналах.
Одним из недостатков данного способа является подверженность НАП воздействию различного рода дестабилизирующих факторов (помех), которое может приводить, как к снижению достоверности навигационных параметров, формируемых НАП, так и к неработоспособности НАП в целом. Под неработоспособностью (неработоспособным состоянием) НАП понимается такое состояние НАП, в котором достоверность формируемых НАП навигационных параметров (пространственных координат) не соответствует заданным требованиям (достоверность информации, принимаемой НАП от спутников СРНС, не соответствует заданным требованиям).
Известен способ (прототип) (см., например, патент на изобретение №2740398 от 14 января 2021 г.), основанный на использовании информации, передаваемой со стороны N воздушных судов, оборудованных НАП и взаимодействующих с оцениваемым ВС, который может быть использован для контроля работоспособности НАП. Данный способ заключается в том, что на стороне каждого n-го ВС, взаимодействующего с оцениваемым ВС, где  , с использованием информации, содержащейся в поступающих на его НАП спутниковых сигналах, формируют значения
, с использованием информации, содержащейся в поступающих на его НАП спутниковых сигналах, формируют значения  собственных пространственных координат n-го ВС в k-е моменты времени в заданной прямоугольной системе координат OXYZ, определяют моменты времени tni передачи специальных информационных посылок (СИП), определяют значения
собственных пространственных координат n-го ВС в k-е моменты времени в заданной прямоугольной системе координат OXYZ, определяют моменты времени tni передачи специальных информационных посылок (СИП), определяют значения  собственных пространственных координат n-го ВС для каждого tni, формируют и передают по каналу системы обмена данными (СОД) в определенные моменты времени tni СИП
собственных пространственных координат n-го ВС для каждого tni, формируют и передают по каналу системы обмена данными (СОД) в определенные моменты времени tni СИП  , содержащие момент времени tni и значения
, содержащие момент времени tni и значения  координат n-го ВС, на стороне оцениваемого ВС с использованием информации, содержащейся в поступающих на контролируемую НАП спутниковых сигналах, формируют значения
координат n-го ВС, на стороне оцениваемого ВС с использованием информации, содержащейся в поступающих на контролируемую НАП спутниковых сигналах, формируют значения  собственных пространственных координат оцениваемого ВС в j-е моменты времени в заданной прямоугольной системе координат OXYZ, принимают СИП
собственных пространственных координат оцениваемого ВС в j-е моменты времени в заданной прямоугольной системе координат OXYZ, принимают СИП  от n-х ВС и фиксируют моменты времени t1ni их приема, определяют значения
от n-х ВС и фиксируют моменты времени t1ni их приема, определяют значения  собственных пространственных координат оцениваемого ВС для каждого tni, с использованием значений t1ni и tni определяют задержки Δtni передаваемых СИП для каждого n, с использованием задержек Δtni определяют основные оценки
собственных пространственных координат оцениваемого ВС для каждого tni, с использованием значений t1ni и tni определяют задержки Δtni передаваемых СИП для каждого n, с использованием задержек Δtni определяют основные оценки  расстояний между оцениваемым ВС и каждым n-м ВС, с использованием значений координат
расстояний между оцениваемым ВС и каждым n-м ВС, с использованием значений координат  и
и  определяют контрольные оценки
определяют контрольные оценки  расстояний между оцениваемым ВС и каждым n-м ВС, с использованием основных
расстояний между оцениваемым ВС и каждым n-м ВС, с использованием основных  и контрольных оценок
и контрольных оценок  расстояний определяют модули Mni их разностей, сравнивают модули Mni с заданным пороговым значением h для каждого n, если модули Mni для каждого n не превышают заданное пороговое значение h, то формируют решение qi=1 о том, что контролируемая НАП является работоспособной на i-й цикл контроля ее работоспособности, в противном случае формируют решение qi=0 о том, что контролируемая НАП является неработоспособной на i-й цикл контроля ее работоспособности.
расстояний определяют модули Mni их разностей, сравнивают модули Mni с заданным пороговым значением h для каждого n, если модули Mni для каждого n не превышают заданное пороговое значение h, то формируют решение qi=1 о том, что контролируемая НАП является работоспособной на i-й цикл контроля ее работоспособности, в противном случае формируют решение qi=0 о том, что контролируемая НАП является неработоспособной на i-й цикл контроля ее работоспособности.
Под оцениваемым ВС понимается ВС, на котором установлена контролируемая НАП. Под контролируемой НАП понимается НАП, работоспособность которой контролируется.
Техническим результатом изобретения является расширение функциональных возможностей прототипа на предмет определения пространственных координат оцениваемого ВС в условиях неработоспособности НАП.
Указанный результат достигается тем, что, если в прототипе по результатам i-го цикла контроля работоспособности НАП оцениваемого ВС сформировано решение qi=1, то в качестве итоговых значений  координат оцениваемого ВС на j-е моменты времени в пределах следующего цикла контроля работоспособности НАП в системе координат OXYZ принимают значения
координат оцениваемого ВС на j-е моменты времени в пределах следующего цикла контроля работоспособности НАП в системе координат OXYZ принимают значения  , в противном случае, если сформировано решение qi=0, то итоговые значения координат оцениваемого ВС в системе координат OXYZ определяют на момент ti с использованием информации, содержащейся в СИП, принятых с четырех ближайших взаимодействующих ВС, где ti - момент формирования решения qi=0, при этом выделяют четыре ближайших ВС к оцениваемому ВС из группы взаимодействующих ВС, с использованием значений координат четырех ближайших ВС формируют матрицу Fi разностнокоординатных коэффициентов, определяют определитель |Fi| матрицы Fi, с использованием значений координат четырех ближайших ВС и основных оценок расстояний между ними и оцениваемым ВС формируют вспомогательные матрицы Fxi, Fyi и Fzi, определяют определители |Fxi|, |Fyi| и |Fzi| вспомогательных матриц Fxi, Fyi и Fzi соответственно, с использованием определителей |Fi|, |Fxi|, |Fyi| и |Fzi| определяют итоговые значения
, в противном случае, если сформировано решение qi=0, то итоговые значения координат оцениваемого ВС в системе координат OXYZ определяют на момент ti с использованием информации, содержащейся в СИП, принятых с четырех ближайших взаимодействующих ВС, где ti - момент формирования решения qi=0, при этом выделяют четыре ближайших ВС к оцениваемому ВС из группы взаимодействующих ВС, с использованием значений координат четырех ближайших ВС формируют матрицу Fi разностнокоординатных коэффициентов, определяют определитель |Fi| матрицы Fi, с использованием значений координат четырех ближайших ВС и основных оценок расстояний между ними и оцениваемым ВС формируют вспомогательные матрицы Fxi, Fyi и Fzi, определяют определители |Fxi|, |Fyi| и |Fzi| вспомогательных матриц Fxi, Fyi и Fzi соответственно, с использованием определителей |Fi|, |Fxi|, |Fyi| и |Fzi| определяют итоговые значения  координат оцениваемого ВС в системе координат OXYZ на момент времени ti.
координат оцениваемого ВС в системе координат OXYZ на момент времени ti.
Сущность изобретения заключается в том, что с определенной периодичностью с использованием информации, содержащейся в СИП, принятых от взаимодействующих ВС, осуществляется контроль работоспособности НАП оцениваемого ВС, при этом, если по результатам очередного цикла контроля работоспособности НАП сформировано решение о ее работоспособности, то в качестве итоговых значений координат оцениваемого ВС в пределах следующего цикла контроля работоспособности НАП принимаются значения координат, сформированные НАП, в противном случае итоговые значения координат оцениваемого ВС определяются с использованием информации, содержащейся в СИП, принятых от четырех ближайших взаимодействующих ВС.
Данный способ включает в себя следующие этапы:
1 На стороне каждого n-го ВС, взаимодействующего с оцениваемым ВС:
1.1 Формируются значения  собственных пространственных координат в k-е моменты времени tnk в заданной прямоугольной системе координат OXYZ с использованием информации, содержащейся в спутниковых сигналах, поступающих на бортовую НАП.
собственных пространственных координат в k-е моменты времени tnk в заданной прямоугольной системе координат OXYZ с использованием информации, содержащейся в спутниковых сигналах, поступающих на бортовую НАП.
1.2 Определяются моменты времени tni передачи СИП в соответствии с выражением

где tn1 - заданный первый момент времени передачи СИП от n-го ВС, i=0, 1, 2, 3,…, Δt - установленный интервал времени между моментами времени передачи СИП.
1.3 Определяются значения  собственных пространственных координат для каждого tni в соответствии с выражением
собственных пространственных координат для каждого tni в соответствии с выражением

1.4 Формируется и передается по каналу СОД в определенные моменты времени tni СИП  , содержащая момент времени tni передачи данной посылки и значения
, содержащая момент времени tni передачи данной посылки и значения  пространственных координат n-го ВС в заданной прямоугольной системе координат OXYZ.
пространственных координат n-го ВС в заданной прямоугольной системе координат OXYZ.
2 На стороне оцениваемого ВС:
2.1 Формируются значения  собственных пространственных координат в j-e моменты времени tj в заданной прямоугольной
собственных пространственных координат в j-e моменты времени tj в заданной прямоугольной
системе координат OXYZ с использованием информации, содержащейся в спутниковых сигналах, поступающих на контролируемую НАП.
2.2 Принимаются СИП  от n-х ВС и фиксируются моменты времени t1ni их приема.
от n-х ВС и фиксируются моменты времени t1ni их приема.
2.3 Определяются значения  собственных пространственных координат для каждого tni в соответствии с выражением
собственных пространственных координат для каждого tni в соответствии с выражением

2.4 Определяются задержки Δtni передаваемых СИП для каждого n в соответствии с выражением

2.5 Определяются основные оценки  расстояний между оцениваемым ВС и каждым n-м ВС в соответствии с выражением
расстояний между оцениваемым ВС и каждым n-м ВС в соответствии с выражением

где ν=3⋅108 м/с - скорость распространения радиосигнала.
2.6 Определяются контрольные оценки  расстояний между оцениваемым ВС и n-ми ВС в соответствии с выражением
расстояний между оцениваемым ВС и n-ми ВС в соответствии с выражением

2.7 Определяются модули Mni разностей основных  и контрольных оценок
и контрольных оценок  расстояний между оцениваемым ВС и n-ми ВС в соответствии с выражением
расстояний между оцениваемым ВС и n-ми ВС в соответствии с выражением

2.8 Формируется решение о работоспособности или неработоспособности контролируемой НАП в соответствии с выражением

где

здесь qi=0 - контролируемая НАП является неработоспособной на i - цикл контроля ее работоспособности; qi=1 - контролируемая НАП является работоспособной на i - цикл контроля ее работоспособности; h - заданное пороговое значение.
Длительность цикла контроля работоспособности НАП определяется установленным интервалом времени Δt между моментами времени передачи СИП, при этом начальный момент времени первого цикла контроля работоспособности НАП определяется моментом времени приема первой СИП от какого-либо из взаимодействующих ВС.
В соответствии с пунктом 2.8, решение о том, что контролируемая НАП является работоспособной на i-цикл контроля ее работоспособности формируется в том случае, если модули Mni для каждого n не превышают заданное пороговое значение h, в противном случае формируется решение о том, что контролируемая НАП является неработоспособной на i - цикл контроля ее работоспособности.
2.9 Если по результатам i-го цикла контроля работоспособности НАП оцениваемого ВС сформировано решение qi=1, то в качестве итоговых значений  координат оцениваемого ВС на j-е моменты времени в пределах следующего цикла контроля работоспособности НАП в системе координат OXYZ принимают значения
координат оцениваемого ВС на j-е моменты времени в пределах следующего цикла контроля работоспособности НАП в системе координат OXYZ принимают значения  , сформированные НАП:
, сформированные НАП:

2.10 Если по результатам i-го цикла контроля работоспособности НАП оцениваемого ВС сформировано решение qi=0, то итоговые значения  координат оцениваемого ВС в системе координат OXYZ определяют на момент ti с использованием информации, содержащейся в СИП, принятых от четырех ближайших взаимодействующих ВС, где ti - момент формирования решения qi=0. При этом:
координат оцениваемого ВС в системе координат OXYZ определяют на момент ti с использованием информации, содержащейся в СИП, принятых от четырех ближайших взаимодействующих ВС, где ti - момент формирования решения qi=0. При этом:
2.10.1 Выделяются четыре ближайших ВС к оцениваемому ВС из группы взаимодействующих ВС в соответствии с пунктами 2.10.1.1 - 2.10.1.4.
2.10.1.1 Выделяется первое ближайшее ВС к оцениваемому ВС из группы N взаимодействующих ВС в соответствии с выражением

где Bni=1 - признак, характеризующий то, что ВС под номером n является ближайшим к оцениваемому ВС из N взаимодействующих ВС;
2.10.1.2 Выделяется второе ближайшее ВС к оцениваемому ВС из группы S взаимодействующих ВС в соответствии с выражением

где Bsi=2 - признак, характеризующий то, что ВС под номером s является ближайшим к оцениваемому ВС из S взаимодействующих ВС,  , S - число взаимодействующих ВС с оцениваемым ВС за исключением первого ближайшего ВС к оцениваемому ВС.
, S - число взаимодействующих ВС с оцениваемым ВС за исключением первого ближайшего ВС к оцениваемому ВС.
2.10.1.3 Выделяется третье ближайшее ВС к оцениваемому ВС из группы Р взаимодействующих ВС в соответствии с выражением

где Bpi=3 - признак, характеризующий то, что ВС под номером p является ближайшим к оцениваемому БЛА из Р взаимодействующих ВС,  Р - число взаимодействующих ВС с оцениваемым ВС за исключением первого и второго ближайших ВС к оцениваемому ВС.
Р - число взаимодействующих ВС с оцениваемым ВС за исключением первого и второго ближайших ВС к оцениваемому ВС.
2.10.1.4 Выделяется четвертое ближайшее ВС к оцениваемому ВС из группы L взаимодействующих ВС в соответствии с выражением

где Bli=4 - признак, характеризующий то, что ВС под номером  является ближайшим к оцениваемому ВС из L взаимодействующих ВС,
является ближайшим к оцениваемому ВС из L взаимодействующих ВС,  , L - число взаимодействующих ВС с оцениваемым ВС за исключением первого, второго и третьего ближайших ВС к оцениваемому БЛА.
, L - число взаимодействующих ВС с оцениваемым ВС за исключением первого, второго и третьего ближайших ВС к оцениваемому БЛА.
2.10.2 Формируется матрица Fi разностнокоординатных коэффициентов в виде
где



здесь  - значения координат первого ближайшего ВС к оцениваемому ВС из группы взаимодействующих ВС, принятые в СИП V1i;
- значения координат первого ближайшего ВС к оцениваемому ВС из группы взаимодействующих ВС, принятые в СИП V1i;
 - значения координат второго ближайшего ВС к оцениваемому ВС из группы взаимодействующих ВС, принятые в СИП V2i;
- значения координат второго ближайшего ВС к оцениваемому ВС из группы взаимодействующих ВС, принятые в СИП V2i;
 - значения координат третьего ближайшего ВС к оцениваемому ВС из группы взаимодействующих ВС, принятые в СИП V3i;
- значения координат третьего ближайшего ВС к оцениваемому ВС из группы взаимодействующих ВС, принятые в СИП V3i;
 - значения координат четвертого ближайшего ВС к оцениваемому ВС из группы взаимодействующих ВС, принятые в СИП V4i.
- значения координат четвертого ближайшего ВС к оцениваемому ВС из группы взаимодействующих ВС, принятые в СИП V4i.
2.10.3 Определяется определитель |Fi| матрицы Fi в соответствии с выражением

2.10.4 Формируются вспомогательные матрицы Fxi, Fyi и Fzi для определения координат оцениваемого ВС в соответствии с пунктами 2.10.4.1 -2.10.4.3.
2.10.4.1 Формируется вспомогательная матрица Fxi для определения координаты оцениваемого ВС по оси ОХ в виде
где
2.10.4.2 Формируется вспомогательная матрица для определения координаты оцениваемого ВС по оси OY в виде
2.10.4.3 Формируется вспомогательная матрица Fzi для определения координаты оцениваемого ВС по оси OZ в виде
2.10.5 Определяются определители |Fxi|, |Fyi| и |Fzi|. вспомогательных матриц Fxi, Fyi и Fzi в соответствии с пунктами 2.10.5.1 - 2.10.5.3.
2.10.5.1 Определяется определитель |Fxi| матрицы Fxi в соответствии с выражением

2.10.5.2 Определяется определитель |Fyi| матрицы Fyi в соответствии с выражением

2.10.5.3 Определяется определитель |Fzi| матрицы Fzi в соответствии с выражением

2.10.6 Определяются итоговые значения  координат оцениваемого ВС в системе координат OXYZ на момент времени ti в соответствии с пунктами 2.10.6.1 - 2.10.6.3.
координат оцениваемого ВС в системе координат OXYZ на момент времени ti в соответствии с пунктами 2.10.6.1 - 2.10.6.3.
2.10.6.1 Определяется значение  координаты оцениваемого ВС по оси ОХ системы координат OXYZ в соответствии с выражением
координаты оцениваемого ВС по оси ОХ системы координат OXYZ в соответствии с выражением

2.10.6.2 Определяется значение  координаты оцениваемого ВС по оси OY системы координат OXYZ в соответствии с выражением
координаты оцениваемого ВС по оси OY системы координат OXYZ в соответствии с выражением

2.10.6.3 Определяется значение  координаты оцениваемого ВС по оси OZ системы координат OXYZ в соответствии с выражением
координаты оцениваемого ВС по оси OZ системы координат OXYZ в соответствии с выражением

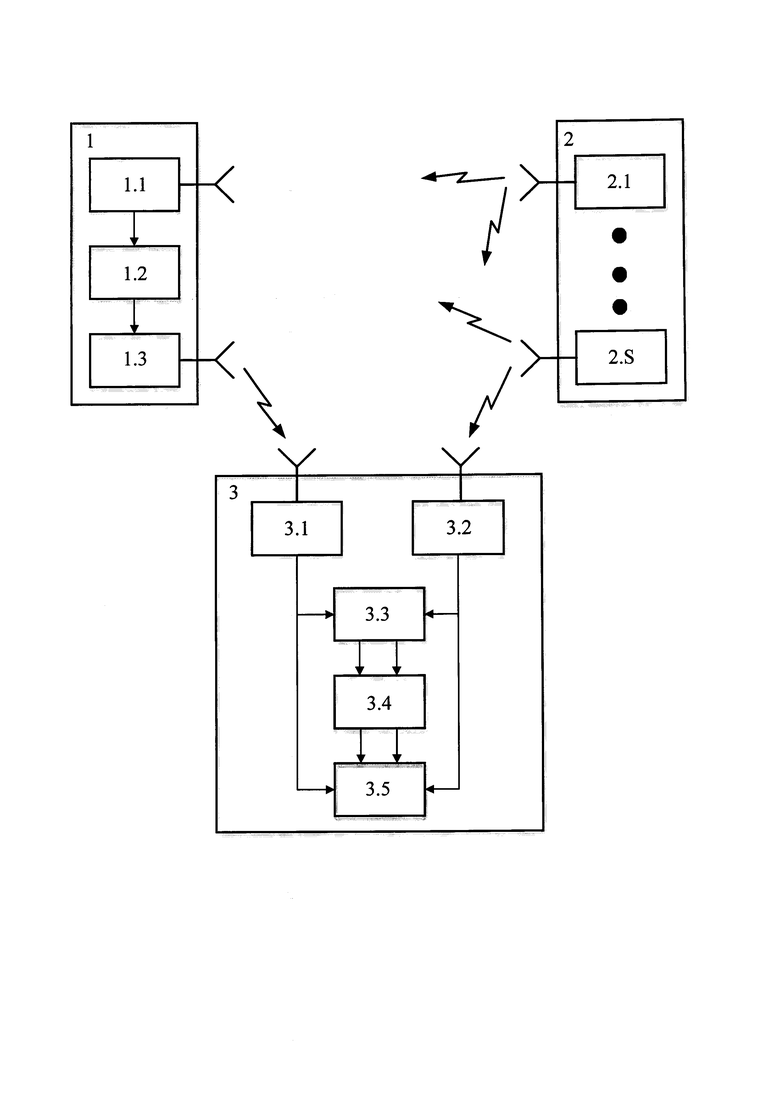
Данный способ может быть реализован, например, с помощью комплекса устройств, структурная схема которого приведена на фигуре 1, где обозначено: 1-n-е ВС, взаимодействующее с оцениваемым ВС; 1.1 - НАП; 1.2 - блок согласования (БС); 1.3 - передатчик СОД; 2 - группировка S видимых спутников спутниковой радионавигационной системы (СРНС); 2.1-1-й спутник СРНС; 2.S - 5-й спутник СРНС, где S - число видимых спутников СРНС; 3 - оцениваемое ВС; 3.1 - приемник СОД; 3.2 - контролируемая НАП; 3.3 - БС; 3.4 - блок контроля работоспособности (БКР); 3.5 - блок определения итоговых координат (БОИК).
НАП 1.1 предназначена для формирования значений  собственных пространственных координат n-го ВС в k-е моменты времени tk в заданной прямоугольной системе координат OXYZ с использованием информации, содержащейся в спутниковых сигналах, поступающих от спутников 2.1 - 2.S. БС 1.2 предназначен для определения моментов времени tni передачи СИП и для определения значений
собственных пространственных координат n-го ВС в k-е моменты времени tk в заданной прямоугольной системе координат OXYZ с использованием информации, содержащейся в спутниковых сигналах, поступающих от спутников 2.1 - 2.S. БС 1.2 предназначен для определения моментов времени tni передачи СИП и для определения значений  собственных пространственных координат на данные моменты времени tni. Передатчик СОД 1.3 предназначен для формирования и передачи СИП
собственных пространственных координат на данные моменты времени tni. Передатчик СОД 1.3 предназначен для формирования и передачи СИП  .
.
Приемник СОД 3.1 предназначен для приема СИП  от n-х ВС и фиксации моментов времени t1ni их приема. Контролируемая НАП 3.2 предназначена для формирования значений
от n-х ВС и фиксации моментов времени t1ni их приема. Контролируемая НАП 3.2 предназначена для формирования значений  собственных пространственных координат оцениваемого ВС в j-е моменты времени tj в заданной прямоугольной системе координат OXYZ с использованием информации, содержащейся в спутниковых сигналах, поступающих от спутников 2.1 - 2.S. БС 3.3 предназначен для определения значений
собственных пространственных координат оцениваемого ВС в j-е моменты времени tj в заданной прямоугольной системе координат OXYZ с использованием информации, содержащейся в спутниковых сигналах, поступающих от спутников 2.1 - 2.S. БС 3.3 предназначен для определения значений  собственных пространственных координат для каждого tni. БКР 3.4 предназначен для обработки информации, поступающей от БС 3.3 и формирования решения о работоспособности или неработоспособности контролируемой НАП 3.2. БОИК 3.5 предназначен для определения итоговых координат оцениваемого ВС.
собственных пространственных координат для каждого tni. БКР 3.4 предназначен для обработки информации, поступающей от БС 3.3 и формирования решения о работоспособности или неработоспособности контролируемой НАП 3.2. БОИК 3.5 предназначен для определения итоговых координат оцениваемого ВС.
Комплекс работает следующим образом. На стороне каждого n-го ВС 1, взаимодействующего с оцениваемым ВС 3, НАП 1.1 формирует значения  собственных пространственных координат n-го ВС в k-е моменты времени tk в заданной прямоугольной системе координат OXYZ с использованием информации, содержащейся в спутниковых сигналах, поступающих от спутников 2.1 - 2.S. Значения
собственных пространственных координат n-го ВС в k-е моменты времени tk в заданной прямоугольной системе координат OXYZ с использованием информации, содержащейся в спутниковых сигналах, поступающих от спутников 2.1 - 2.S. Значения  с выхода НАП 1.1 поступают на вход БС 1.2. БС 1.2 определяет моменты времени tni передачи СИП в соответствии с этапом 1.2 и определяет значения
с выхода НАП 1.1 поступают на вход БС 1.2. БС 1.2 определяет моменты времени tni передачи СИП в соответствии с этапом 1.2 и определяет значения  собственных пространственных координат n-го ВС на данные моменты времени tni в соответствии с этапом 1.3. Значения tni и
собственных пространственных координат n-го ВС на данные моменты времени tni в соответствии с этапом 1.3. Значения tni и  с выхода БС 1.2 поступают на вход передатчика СОД 1.3. Передатчик СОД 1.3 формирует СИП
с выхода БС 1.2 поступают на вход передатчика СОД 1.3. Передатчик СОД 1.3 формирует СИП  и передает ее в определенные моменты времени tni, через ненаправленную антенну. На стороне оцениваемого ВС 3. Приемник СОД 3.1 принимает СИП
и передает ее в определенные моменты времени tni, через ненаправленную антенну. На стороне оцениваемого ВС 3. Приемник СОД 3.1 принимает СИП  от n-х ВС и фиксирует моменты времени t1ni их приема. Значения t1ni, tni и
от n-х ВС и фиксирует моменты времени t1ni их приема. Значения t1ni, tni и  с выхода приемника СОД 3.1 поступают через БС 3.3 на вход БКР 3.4. Кроме этого значения
с выхода приемника СОД 3.1 поступают через БС 3.3 на вход БКР 3.4. Кроме этого значения  с выхода приемника СОД 3.1 поступают на вход БОИК 3.5. Контролируемая НАП 3.2 формирует значения
с выхода приемника СОД 3.1 поступают на вход БОИК 3.5. Контролируемая НАП 3.2 формирует значения  собственных пространственных координат оцениваемого ВС в j-е моменты времени tj в заданной прямоугольной системе координат OXYZ с использованием информации, содержащейся в спутниковых сигналах, поступающих от спутников 2.1 - 2.S. Значения
собственных пространственных координат оцениваемого ВС в j-е моменты времени tj в заданной прямоугольной системе координат OXYZ с использованием информации, содержащейся в спутниковых сигналах, поступающих от спутников 2.1 - 2.S. Значения  с выхода контролируемой НАП 3.2 поступают на вход БС 3.3 и БОИК 3.5. БС 3.3 определяет значения
с выхода контролируемой НАП 3.2 поступают на вход БС 3.3 и БОИК 3.5. БС 3.3 определяет значения  собственных пространственных координат для каждого tni в соответствии с этапом 2.3. Значения
собственных пространственных координат для каждого tni в соответствии с этапом 2.3. Значения  с выхода БС 3.3 поступают на вход БКР 3.4. БКР 3.4 обрабатывает поступающую с выхода БС 3.3 информацию и формирует решение qi о работоспособности или неработоспособности контролируемой НАП 3.2 в соответствии с этапами 2.4 - 2.8. Решение qi с выхода БКР 3.4 поступает на вход БОИК 3.5. Кроме этого на вход БОИК 3.5 с выхода БКР 3.4 поступают значения основных оценок
с выхода БС 3.3 поступают на вход БКР 3.4. БКР 3.4 обрабатывает поступающую с выхода БС 3.3 информацию и формирует решение qi о работоспособности или неработоспособности контролируемой НАП 3.2 в соответствии с этапами 2.4 - 2.8. Решение qi с выхода БКР 3.4 поступает на вход БОИК 3.5. Кроме этого на вход БОИК 3.5 с выхода БКР 3.4 поступают значения основных оценок  расстояний между взаимодействующими ВС и оцениваемым ВС.БОИК 3.5 обрабатывает поступающую с выходов БКР 3.4, СОД 3.1 и НАП 3.2 информацию и, если с выхода БКР 3.4 поступает решение qi=1, то БОИК 3.5 определяет итоговые значения
расстояний между взаимодействующими ВС и оцениваемым ВС.БОИК 3.5 обрабатывает поступающую с выходов БКР 3.4, СОД 3.1 и НАП 3.2 информацию и, если с выхода БКР 3.4 поступает решение qi=1, то БОИК 3.5 определяет итоговые значения  координат оцениваемого ВС на j-е моменты времени в пределах следующего цикла контроля работоспособности НАП 3.2 в соответствии с этапом 2.9, в противном случае, если с выхода БКР 3.4 поступает решение qi=0, то БОИК 3.5 определяет итоговые значения
координат оцениваемого ВС на j-е моменты времени в пределах следующего цикла контроля работоспособности НАП 3.2 в соответствии с этапом 2.9, в противном случае, если с выхода БКР 3.4 поступает решение qi=0, то БОИК 3.5 определяет итоговые значения  координат оцениваемого ВС на момент ti в соответствии с этапом 2.10.
координат оцениваемого ВС на момент ti в соответствии с этапом 2.10.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ определения пространственных координат ВС, сущность которого заключается в том, что с определенной периодичностью с использованием информации, содержащейся в СИП, принятых от взаимодействующих ВС, осуществляется контроль работоспособности НАП оцениваемого ВС, при этом, если по результатам очередного цикла контроля работоспособности НАП сформировано решение о ее работоспособности, то в качестве итоговых значений координат оцениваемого ВС в пределах следующего цикла контроля работоспособности НАП принимаются значения координат, сформированные НАП, в противном случае итоговые значения координат оцениваемого ВС определяются с использованием информации, содержащейся в СИП, принятых от четырех ближайших взаимодействующих ВС.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что, для определения пространственных координат оцениваемого ВС в условиях неработоспособности НАП необходимо использовать информацию, содержащуюся в СИП, принятых от четырех ближайших взаимодействующих ВС.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области электронной и электротехники.
Изобретение относится к области радиотехники и может быть использовано при создании и модернизации средств определения пространственных координат воздушного судна (ВС). Техническим результатом изобретения является расширение функциональных возможностей для определения пространственных координат оцениваемого ВС в условиях неработоспособности навигационной аппаратуры потребителя (НАП). Заявленный способ заключается в том, что с определенной периодичностью с использованием информации, содержащейся в информационных посылках, принятых от взаимодействующих ВС, осуществляется контроль работоспособности НАП оцениваемого ВС. Если по результатам очередного цикла контроля работоспособности НАП сформировано решение о ее работоспособности, то в качестве итоговых значений координат оцениваемого ВС в пределах следующего цикла контроля работоспособности НАП принимаются значения координат, сформированные НАП. В противном случае итоговые значения координат оцениваемого ВС определяются с использованием информации, содержащейся в информационных посылках, принятых от четырех ближайших взаимодействующих ВС. 1 ил.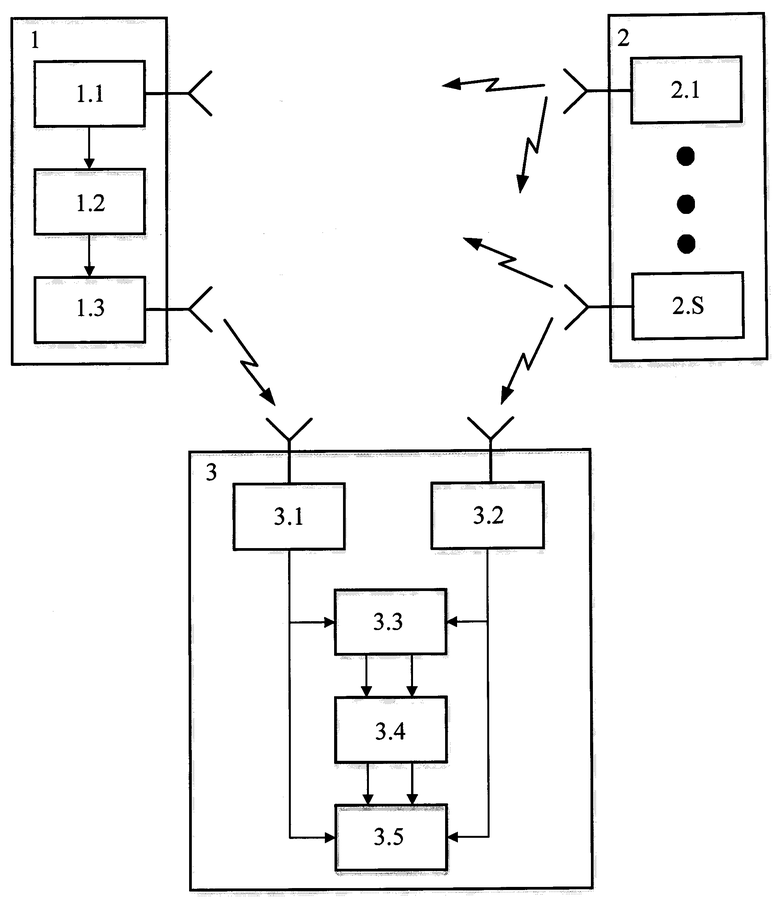
Способ определения пространственных координат воздушного судна (ВС), заключающийся в том, что на стороне каждого n-го ВС, взаимодействующего с оцениваемым ВС, где  N - число ВС, взаимодействующих с оцениваемым ВС, с использованием информации, содержащейся в поступающих на его навигационную аппаратуру потребителя (НАП) спутниковых сигналах, формируют значения
N - число ВС, взаимодействующих с оцениваемым ВС, с использованием информации, содержащейся в поступающих на его навигационную аппаратуру потребителя (НАП) спутниковых сигналах, формируют значения  собственных пространственных координат n-го ВС в k-е моменты времени в заданной прямоугольной системе координат
собственных пространственных координат n-го ВС в k-е моменты времени в заданной прямоугольной системе координат  определяют моменты времени
определяют моменты времени  передачи информационных посылок (ИП) в соответствии с выражением
передачи информационных посылок (ИП) в соответствии с выражением  где
где  - заданный первый момент времени передачи ИП от n-го ВС,
- заданный первый момент времени передачи ИП от n-го ВС, 
 - установленный интервал времени между моментами времени передачи ИП, определяют значения
- установленный интервал времени между моментами времени передачи ИП, определяют значения  собственных пространственных координат n-го ВС для каждого
собственных пространственных координат n-го ВС для каждого  формируют и передают по каналу системы обмена данными в определенные моменты времени
формируют и передают по каналу системы обмена данными в определенные моменты времени  ИП
ИП  содержащие момент времени
содержащие момент времени  и значения
и значения  координат n-го ВС, на стороне оцениваемого ВС с использованием информации, содержащейся в поступающих на контролируемую НАП спутниковых сигналах, формируют значения
координат n-го ВС, на стороне оцениваемого ВС с использованием информации, содержащейся в поступающих на контролируемую НАП спутниковых сигналах, формируют значения  собственных пространственных координат оцениваемого ВС в j-е моменты времени в системе координат OXYZ, принимают ИП
собственных пространственных координат оцениваемого ВС в j-е моменты времени в системе координат OXYZ, принимают ИП  от n-х ВС и фиксируют моменты времени
от n-х ВС и фиксируют моменты времени  их приема, определяют значения
их приема, определяют значения  собственных пространственных координат оцениваемого ВС для каждого
собственных пространственных координат оцениваемого ВС для каждого  с использованием значений
с использованием значений  и
и  определяют задержки
определяют задержки  передаваемых ИП для каждого n, с использованием задержек
передаваемых ИП для каждого n, с использованием задержек  определяют основные оценки
определяют основные оценки  расстояний между оцениваемым ВС и каждым n-м ВС, с использованием значений координат
расстояний между оцениваемым ВС и каждым n-м ВС, с использованием значений координат  и
и  определяют контрольные оценки
определяют контрольные оценки  расстояний между оцениваемым ВС и каждым n-м ВС, с использованием основных
расстояний между оцениваемым ВС и каждым n-м ВС, с использованием основных  и контрольных оценок
и контрольных оценок  расстояний определяют модули
расстояний определяют модули  их разностей, сравнивают модули
их разностей, сравнивают модули  с заданным пороговым значением h для каждого n, если модули
с заданным пороговым значением h для каждого n, если модули  для каждого n не превышают заданное пороговое значение h, то формируют решение
для каждого n не превышают заданное пороговое значение h, то формируют решение  о том, что контролируемая НАП является работоспособной на i-й цикл контроля ее работоспособности, в противном случае формируют решение
о том, что контролируемая НАП является работоспособной на i-й цикл контроля ее работоспособности, в противном случае формируют решение  о том, что контролируемая НАП является неработоспособной на i-й цикл контроля ее работоспособности, отличающийся тем, что, если сформировано решение
о том, что контролируемая НАП является неработоспособной на i-й цикл контроля ее работоспособности, отличающийся тем, что, если сформировано решение  то в качестве итоговых значений
то в качестве итоговых значений  координат оцениваемого ВС на j-е моменты времени в пределах следующего цикла контроля работоспособности НАП в системе координат
координат оцениваемого ВС на j-е моменты времени в пределах следующего цикла контроля работоспособности НАП в системе координат  принимают значения
принимают значения  в противном случае, если сформировано решение
в противном случае, если сформировано решение  то итоговые значения координат оцениваемого ВС в системе координат
то итоговые значения координат оцениваемого ВС в системе координат  определяют на момент
определяют на момент  с использованием информации, содержащейся в ИП, принятых от четырех ближайших взаимодействующих ВС, где
с использованием информации, содержащейся в ИП, принятых от четырех ближайших взаимодействующих ВС, где  - момент формирования решения
- момент формирования решения  при этом выделяют четыре ближайших ВС к оцениваемому ВС из группы взаимодействующих ВС, с использованием значений координат четырех ближайших ВС формируют матрицу
при этом выделяют четыре ближайших ВС к оцениваемому ВС из группы взаимодействующих ВС, с использованием значений координат четырех ближайших ВС формируют матрицу  разностно-координатных коэффициентов, в виде
разностно-координатных коэффициентов, в виде
 здесь
здесь  - значения координат первого, второго, третьего и четвертого ближайших ВС к оцениваемому ВС из группы взаимодействующих ВС, определяют определитель
- значения координат первого, второго, третьего и четвертого ближайших ВС к оцениваемому ВС из группы взаимодействующих ВС, определяют определитель  матрицы
матрицы  с использованием значений координат четырех ближайших ВС и основных оценок расстояний между ними и оцениваемым ВС формируют вспомогательные матрицы
с использованием значений координат четырех ближайших ВС и основных оценок расстояний между ними и оцениваемым ВС формируют вспомогательные матрицы 
 и
и  для определения координаты оцениваемого ВС по осям OX, OY и OZ соответственно в виде
для определения координаты оцениваемого ВС по осям OX, OY и OZ соответственно в виде
 где
где

определяют определители  вспомогательных матриц
вспомогательных матриц  и
и  соответственно, с использованием определителей
соответственно, с использованием определителей  определяют итоговые значения
определяют итоговые значения  координат оцениваемого ВС в системе координат
координат оцениваемого ВС в системе координат  на момент времени
на момент времени  .
.
| СПОСОБ КОНТРОЛЯ ДОСТОВЕРНОСТИ ИНФОРМАЦИИ, ПРИНИМАЕМОЙ НАВИГАЦИОННОЙ АППАРАТУРОЙ ПОТРЕБИТЕЛЯ ВОЗДУШНОГО СУДНА | 2020 |
|
RU2740398C1 |
| СПОСОБ КОНТРОЛЯ ДОСТОВЕРНОСТИ ДАННЫХ СИСТЕМЫ АВТОМАТИЧЕСКОГО ЗАВИСИМОГО НАБЛЮДЕНИЯ | 2017 |
|
RU2667494C1 |
| СПОСОБ КОНТРОЛЯ ДОСТОВЕРНОСТИ ИНФОРМАЦИИ, ПРИНИМАЕМОЙ НАВИГАЦИОННОЙ АППАРАТУРОЙ ПОТРЕБИТЕЛЯ ВОЗДУШНОГО СУДНА | 2021 |
|
RU2777836C1 |
| ДАЛЬНОМЕРНАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА БЛИЖНЕЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2478979C1 |
| СПОСОБ ПОВЫШЕНИЯ ЦЕЛОСТНОСТИ ИСПОЛЬЗУЕМЫХ СИГНАЛОВ НАВИГАЦИОННЫХ СПУТНИКОВ С ПОМОЩЬЮ ЛОКАЛЬНОЙ КОНТРОЛЬНО-КОРРЕКТИРУЮЩЕЙ СТАНЦИИ (ЛККС) С УЧЕТОМ ВЛИЯНИЯ АНОМАЛЬНОЙ ИОНОСФЕРЫ | 2013 |
|
RU2542326C1 |
| СПОСОБ КОНТРОЛЯ ДОСТОВЕРНОСТИ И УСТРОЙСТВО ОБЪЕДИНЕНИЯ/КОНСОЛИДАЦИИ С МНОЖЕСТВОМ МОДУЛЕЙ ОБРАБОТКИ | 2014 |
|
RU2634693C2 |
| US 11187813 B2, 30.11.2021 | |||
| CN 111060133 A, 24.04.2020 | |||
| US 2010309044 A1, 09.12.2010 | |||
| US 2002149515 A1, 17.10.2002. | |||
