Изобретение относится к области управления, в частности к способам управления электроприводами преимущественно позиционного типа, например, приводами координат электромеханических роботов -манипуляторов, приводами подач станков, различных следящих систем, в том числе статоров сегментных ветроэлектрогенераторов.
Один из таких способов описан, например, в а.с. СССР №1283924 - электропривод координаты манипулятора/ В.И. Ключев и др., опубл. В Б.И. №2, 1987 г. Управление приводом осуществляется по принципу подчиненного регулирования, при этом параллельно конденсатору в цепи обратной связи ПИ-регулятора включен нелинейный элемент, управляемый в функции положения манипулятора.
Наиболее близким по технической сущности является способ по а.с. СССР №11362. 88 - Способ управления электроприводом постоянного тока/А.А. Кардашев и др. в Б.И., №3, 1985 г.
Данный способ заключается в управлении изменением токоограничения при запуске электропривода при подаче на него управляющего воздействия, например, в виде скачкообразной функции.
Его недостатком является то, что такой способ управления никак не компенсирует, или, хотя бы не уменьшает момент сопротивления механизма, обусловленный сухим трением. Между тем, механизмов, особенно снабженных различными уплотнениями, подшипниками скольжения, в том числе и полимерными, червячными и фрикционными передачами, направляющими устройствами и другими механизмами аналогичного назначения.
Отсутствие компенсации сухого трения приводит к повышению энергозатрат при пуске, т.е. к снижению экономичности и, следовательно, к уменьшению производительности привода, поскольку увеличение энергозатрат идет не на полезную работу, а на преодоление сил трения, в частности, трения покоя (сухого трения).
Изобретение направлено на снижение энергозатрат, увеличение производительности.
Это достигается тем, что управляющее воздействие формируют в виде суммы постоянной и переменной составляющих, причем амплитуду переменной составляющей сначала увеличивают до величины постоянной составляющей, а затем уменьшают по мере разгона электропривода до нуля.
Существенным является формирование управляющего воздействия в виде суммы постоянной и переменной составляющих. Поскольку данного технического решения при проведении патентных исследований не обнаружено, этот признак является и отличительным.
Сущность устройства, реализующего данный способ, представлена на фиг. 1, а на фиг. 2 показана форма управляющего воздействия, подающегося на электропривод.
Предлагаемый способ управления реализуется следующим образом.
Электропривод постоянного тока содержит программный задатчик 1, связанный, например, с системой управления, например, промышленным роботом, элемент сравнения 2, усилитель постоянного напряжения 3, источник переменного напряжения 4, дифференцирующий ограничитель 5, элемент суммирования 6, регулятор 7, тиристорный преобразователь 8, двигатель 9, датчик тока 10, датчик скорости 11, блок обратных связей 12, датчик положения 13. Элементы сравнения и суммирования реализованы на операционных усилителях, блок 5 представляет собой реальное дифференцирующее звено, регулятор 7 - подчиненного типа, датчик тока 10 является шунтом, а датчик 11 представляет собой тахогенератор. Датчик 13 является, например, переменным многообмоточным потенциометром. Имеется пороговый элемент 14, на валу 15 двигателя закреплен редуктор 16 и позиционный механизм 17.
Электропривод, реализующий заявленный способ управления, работает следующим образом.
Сигнал, поступающий от программного датчика 1, пропорциональный требуемой величине координаты, поступает на элемент 2, где сравнивается с сигналом, пропорциональным фактической величине координаты. Затем рассогласование подается одновременно на усилитель 3 и на источник 4. Усилитель 3 - обычного типа, т.е. линейный. На входе источника 4 имеется пороговый элемент 14, который включает переменное напряжение практически при любых значениях рассогласования (для астатической системы) и при некотором минимальном значении, определенным максимальным статизмом (статическая система). От источника 4 переменное напряжение поступает на дифференциальный ограничитель 5. Сигналы с усилителя 3 и ограничителя 5 суммируясь в элементе суммирования 6 поступают на регулятор 7. На регулятор 7 так же поступает сигнал с блока обратных связей 12. Преобразователь 3 задает установку скорости вращения двигателя, а тахогенератор 11 измеряет действительную скорость вращения электродвигателя 9. На фиг. 2 кривая 1 это сигнал с программного задатчика, а кривая 2 - сигнал с порогового элемента, кривая 3 - сигнал с дифференцирующего ограничителя.
Датчики положения, тока и скорости формируют сигналы и преобразуют сигналы в напряжения соответственно: Uп, Uт, Uc.
Способ позволяет увеличить экономичность, увеличить производительность привода, т.к. уменьшение сухого трения приводит к уменьшению энергозатрат при пуске.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с подчиненным регулированием параметров | 1983 |
|
SU1108593A2 |
| Задающее устройство | 1978 |
|
SU764078A1 |
| Устройство для управления электроприводом постоянного тока | 1977 |
|
SU748753A1 |
| Устройство управления электроприводом переменного тока | 1976 |
|
SU657558A1 |
| Следящий электропривод | 1981 |
|
SU1045219A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Частотно-регулируемый электропривод | 1979 |
|
SU866681A1 |
| Способ управления электроприводом постоянного тока | 1982 |
|
SU1150721A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА ДЛЯ УПРАВЛЕНИЯ ОБЪЕКТОМ С УПРУГИМИ СВЯЗЯМИ | 2011 |
|
RU2489797C1 |
| Устройство управления электроприводом | 1983 |
|
SU1161920A1 |

Изобретение относится к области управления, в частности к способам управления электроприводами, преимущественно позиционного типа. Техническим результатом изобретения является снижение энергозатрат, увеличение производительности. Технический результат достигается тем, что управляющее воздействие формируют в виде суммы постоянной и переменной составляющих, причем амплитуду переменной составляющей уменьшают по мере разгона электропривода. Данный способ позволяет уменьшить сухое трение, что приводит к уменьшению энергозатрат при пуске. 2 ил.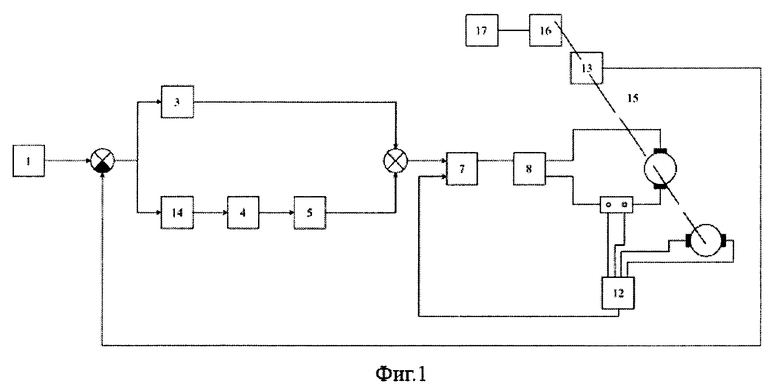
Способ управления электроприводом постоянного тока, заключающийся в подаче на электродвигатель управляющего воздействия, отличающийся тем, что управляющее воздействие формирует в виде суммы постоянной и переменной составляющих, причем амплитуду переменной составляющей сначала увеличивают до величины постоянной составляющей, а затем уменьшают по мере разгона электропривода до нуля.
| ЭЛЕКТРОПРИВОД ДЛЯ СОЗДАНИЯ ВРАЩАТЕЛЬНОГО МОМЕНТА И ЕГО СИСТЕМА УПРАВЛЕНИЯ | 2005 |
|
RU2322747C2 |
| ЭЛЕКТРОПРИВОД ДЛЯ СОЗДАНИЯ ВРАЩАТЕЛЬНОГО МОМЕНТА (ЕГО ВАРИАНТЫ) И ЕГО СИСТЕМА УПРАВЛЕНИЯ (ЕЕ ВАРИАНТЫ) | 2005 |
|
RU2322746C2 |
| Способ управления шаговым двигателем | 1989 |
|
SU1647842A1 |
| Способ активирования оксидных катодов электронных приборов | 1973 |
|
SU474867A1 |

