Изобретение относится к устройству управления машиной, приспособленной для обработки участка полосами по заранее заданной траектории, которая включает в себя по меньшей мере две дорожки, в частности, последовательно расположенные первую и вторую дорожки (и которая имеет начало), определяющее начальную позицию машины.
Такие устройства управления известны и применяются для направления собирающей урожай машины вдоль рядов участка, на котором собирают урожай, например, участка с урожаем свеклы.
Известные системы автоматического направления свеклоуборочных машин используют механические датчики для обнаружения положения урожая свеклы, при этом направляющими осями машины управляют на основе упомянутого обнаружения корнеплодов.
Кроме того, на основе GPS информации машины во время посева сельскохозяйственной культуры вырабатывают карту положений посева. Карта на основе GPS, созданную во время посева, далее используется для направления уборочной машины во время сбора урожая.
Уборочная машина собирает урожай в соответствии с последовательно расположенными рядами. Во время сбора урожая при достижении машиной конца ряда водители, особенно неопытные, тратят большое количество времени для надлежащего изменения положения машины в начале следующего ряда, если вообще они могут этого добиться.
Небольшие ошибки позиционирования могут быть скомпенсированы датчиками обнаружения сельскохозяйственной культуры. Однако большие ошибки позиционирования, на уровне определения расстояния между двумя соседними свеклами, не могут быть скорректированы управлением только на основе датчиков.
Также карта посеянных растений, основанная на GPS, часто недоступна, в частности, для некоторых типов растений, таких как сахарная свекла.
В документе WO2013/071190 описано устройство управления, которое, в целом, позволяет управлять машиной в более или менее незнакомой обстановке.
Задача изобретения заключается в устранении известных недостатков и обеспечении эффективного и экономичного по времени управления машиной, которую необходимо направлять по заданной траектории. В частности, изобретение направлено на обеспечение экономичного направления собирающей урожай машины к идеальному положению в начале ряда, подлежащего обработке.
Поставленная задача решения устройством управления по пункту 1 формулы изобретения.
Варианты выполнения такого устройства описаны в зависимых пунктах 2 - 9 формулы изобретения.
Кроме того, изобретение относится к машине, содержащей такое устройство и к способу обработки участка такой машиной.
Изобретение станет более понятным из дальнейшего описания со ссылками на чертежи.
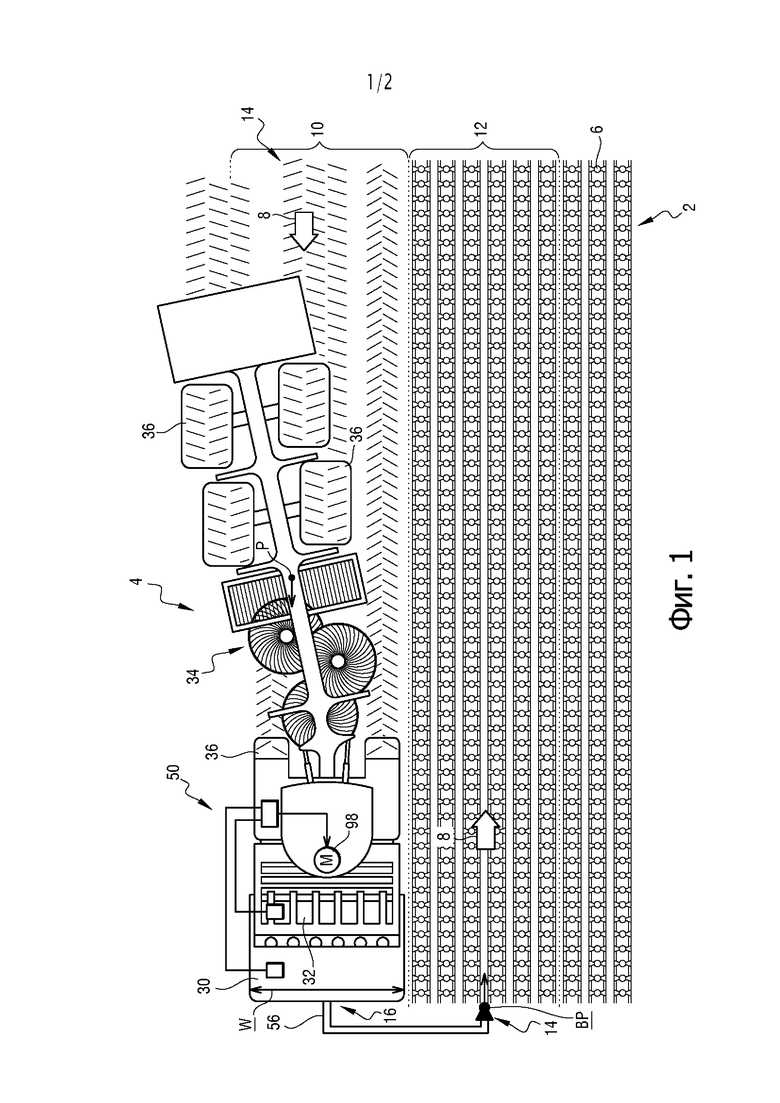
На фиг. 1 схематично показан участок, подлежащий обработке машиной, содержащей устройство управления согласно изобретению;
на фиг. 2 схематично показано устройство управления согласно изобретению, установленное на машине по фиг. 1.
На фиг. 1 показан участок 2, подлежащий обработке машиной 4. Участок содержит, например, сельскохозяйственную культуру 6, такую как сахарная свекла или другие корнеплоды.
Участок подлежит обработке машиной 4 полосами по заранее заданной траектории 8, которая содержит по меньшей мере два последовательно расположенных ряда 10 и 12, называемые первым и вторым рядами. Ряды 10 и 12 ограничены рабочей шириной W машины 4 и включают в себя заданное количество смежных отдельных линий сельскохозяйственной культуры. В данном примере показано шесть отдельных линий культуры. В общем смысле, траектория вместо рядов содержит дорожки, ограниченные рабочей шириной машины 4, и среднюю линию, вдоль которой машине необходимо перемещаться во время обработки. В частности, далее будут описаны дорожки, представленные рядами 10 и 12. В дальнейшем ряд в частном случае будет называться дорожкой.
Участок 2 имеет границы, и каждый ряд 10, 12 содержит начало 14 и конец 16, определенные этими границами. Когда машина обрабатывает участок, например, S-образным способом, начало второго ряда 12 является смежным концу первого ряда 10. Ряды 10 и 12, например, параллельны друг другу и примыкают друг к другу. Если участок обрабатывают несколько машин 4, первый и второй ряды 10 и 12 могут быть не смежными, а могут быть отделены промежуточными рядами. В качестве альтернативы, первый и второй ряды 10 и 12 могут быть не параллельны друг другу, а располагаться с некоторым угловым смещением друг относительно друга, например, если участок не имеет прямоугольную форму.
Машина 4 определяет позицию Р, которая указывает на положение этой машины относительно участка 2, а также ориентацию каждого компонента машины относительно участка. Таким образом, позиция Р однозначно определяет расположение машины относительно участка 2. В качестве альтернативы, позиция Р показывает положение и ориентацию части компонентов машины, которая используются для обработки участка 2. Например, позиция Р может быть определена только теми компонентами, которые воздействуют на сельскохозяйственную культуру, такими как распылительные головки, ножи, выкорчевывающие элементы. В случае машины для сбора свеклы, содержащей секцию 30 обрезания листвы и секцию 32 корчевания (описана ниже), позиция Р может быть определена только положением и ориентацией секции 30 обрезания листвы и/или секции 32 корчевания.
Начало 14 второго ряда 12 определяет начальную позицию ВР машины, идеальную для обработки второго ряда 12 с самого его начала 14. Начальная позиция представляет собой позицию, в которой машина 4 обрабатывает сельскохозяйственную культуру 6, расположенную наиболее близко к началу 14 ряда, и/или последующая сельскохозяйственная культура второго ряда 12 также может быть обработана без каких-либо потерь или с минимальными потерями. Начальная позиция ВР также может быть позицией машины, в которой вся сельскохозяйственная культура второго ряда 12 может быть собрана с минимальным временем обработки второго ряда машиной или с минимальной длиной траектории для второго ряда.
На фиг. 1 показана машина 4, которая является уборочной машиной для свеклы и содержит секцию 30 обрезания листвы, секцию 32 корчевания и средства 34 транспортировки и очищения корнеплодов. Тем не менее, такая машина показана только для пояснения, и может представлять собой любую другую сельскохозяйственную машину. Например, машина 4 может быть машиной для распыления жидкостей на участке с растениями или без них, например, удобрений, гербицидов или пестицидов.
Машина 4 содержит колеса 36. В качестве альтернативы, машина может содержать гусеничные ленты или гусеничное шасси.
Машина 4 содержит устройство 50 управления, выполненное с возможностью управления перемещением и отклонением машины. Устройство управления выполнено с возможностью сбора информации о первом ряде во время его обработки машиной.
Устройство 50 управления содержит блок 52 задания траектории, выполненный с возможностью создания траектории 56 для направления машины 4 к начальной позиции ВР на основании информации о первом ряде 10.
Блок 52 задания траектории содержит средство 58 запоминания положений, выполненное с возможностью сохранения информации о последовательных положениях машины 4 при обработке первого ряда 10. Кроме того, средство запоминания 58 положений также может быть выполнено с возможностью сохранения информации о позиции Р машины в каждом сохраненном положении.
Устройство 50 управления также содержит модуль 60 формирования траектории, выполненный с возможностью задания траектории 56 на основе информации о последовательности положений, сохраненных в средстве 58 запоминания положений. Для этого средство 58 запоминания положений связано с модулем 60 формирования траектории посредством связи 62.
Преимущественно средство 58 запоминания положений представляет собой циклическую буферную память, в которой информация о последовательных положениях машины содержит сведения о наиболее позднем положении машины 4, причем циклическая буферная память выполнена с возможностью перезаписи информации о наиболее позднем положении машины на информацию о новом или текущем положении машины при добавлении в нее информации о новом или текущем положении машины. Циклическая буферная память 58 имеет объем, позволяющий сохранять информацию по меньшей мере об одном положении, а по большей мере - о максимальном количестве положений. Преимущественно максимальное количество положений составляет от 1 до 100. Это приводит к незначительным требованиям к памяти устройства, позволяя в тоже время определить средний вектор траектории с достаточной надежностью. Объем циклической буферной памяти также является достаточным для сохранения соответствующей информации о позиции для каждого сохраненного положения.
Блок 52 задания траектории также содержит средство 70 определения положения, которое выполнено с возможностью определения текущего положения машины. Средство 70 определения положения выполнено с возможностью определения текущего положения машины относительно участка, в частности, относительно первого ряда 10 при его обработке.
Средство 70 определения положения содержит, например, приемный GPS модуль 72, выполненный с возможностью приема GPS сигнала от GPS спутника 74, и модуль 76 определения положения. Таким образом, GPS модуль позволяет определить абсолютное положение машины на участке.
GPS модуль 72 связан с модулем 76 определения положения посредством связи 78, через которую модуль 76 определения положения принимает сигналы, представляющие собой GPS положение машины.
Средство 70 определения положения также содержит по меньшей мере один датчик положения, выполненный с возможностью определения положения машины относительно участка и, в частности, относительно подлежащей обработке сельскохозяйственной культуры 6. Таким образом, датчик положения выполнен с возможностью определения относительного положения машины относительно участка или текущего ряда. В этом варианте осуществления изобретения датчик положения включает в себя датчик 80 для обрезания листвы свеклы и датчик 82 для корчевания свеклы. Датчики положения соединены с модулем 76 определения положения посредством связи 84, и модули определения положения принимают сигналы определения от датчика/датчиков 80, 82 посредством связи 84. В целом, датчики положения могут содержать датчики обнаружения сельскохозяйственной культуры, в частности, датчики обнаружения корнеплодов. Датчик (датчики) положения может содержать механический датчик, такой как палец, связанный с потенциометром, или механический переключатель, или ультразвуковые датчики. Палец соединен с пружиной, толкающей палец в нейтральное положение, когда отсутствует контакт с сельскохозяйственной культурой. В качестве альтернативы, средство 70 определения положения содержит только один из датчиков 80 и 82 или другие датчики.
Средство 70 определения положения, в данном случае модуль 76 определения положения, соединено со средством запоминания 58 положений посредством связи 86 и выполнено с возможностью записи информации о текущем положении Р и, при необходимости, другой информации о текущей позиции машины 4 в средство 58 запоминания положений.
Блок 52 задания траектории также содержит устройство 90 запоминания параметров, которое сохраняет информацию о параметрах машины 4. Информация о параметрах машины содержит, в частности, сведения о геометрии или конфигурации машины, такие как кинематика, количество и степени свободы осей и колес, рабочая ширина W инструментов, таких как ножи для листвы и секция корчевания.
Устройство 90 запоминания параметров соединено с модулем 60 формирования траектории посредством связи 92, причем модуль 60 формирования траектории выполнен с возможностью задания траектории 56 на основе информации о параметрах, содержащейся в устройстве запоминания параметров.
В результате, модуль 60 формирования траектории учитывает геометрию и конфигурацию машины 4 при вычислении траектории к начальной позиции ВР.
Модуль 60 формирования траектории также может быть выполнен для определения начальной позиции ВР машины 4 на основе информации из устройства запоминания параметров и/или информации о первом ряде 10 до формирования траектории 56.
Машина 4 также содержит средство 96 руления, выполненное с возможностью управления перемещением этой машины 4. В частности, средство 96 руления выполнено с возможностью управления углом поворота колес 36 и приведением их в движение посредством управления рулением и/или приведением в действие двигателя 98.
Средство 96 руления содержит модуль 100 руления по заданной траектории, который выполнен с возможностью выработки команд руления на основе заданной траектории, сформированной модулем 60 для направления машины 4 к начальной позиции по траектории 56. Для этого модуль 60 формирования траектории связан с модулем 100 руления посредством связи 102, так что модуль 100 принимает информацию о траектории 56 от модуля 60. Модуль 100 руления по заданной траектории также соединен с модулем 76 определения положения посредством связи 104 и принимает информацию о текущем положении машины 4 относительно участка от модуля 76 определения положения. Модуль 100 руления по заданной траектории также может быть соединен с другими датчиками, которые указывают текущее положение и/или позицию машины.
Средство 96 руления также может содержать модуль 110 руления по дорожке, выполненный с возможностью выработки команд руления на основе текущего положения и, в рассматриваемом варианте выполнения, на основе одного или нескольких датчиков 80 и 82. Модуль 110 руления по дорожке, при необходимости, выполнен с возможностью выработки команд руления на основе информации о положениях, принятой от модуля 76 определения положения. Модуль руления по дорожке выполнен с возможностью поддержания определенного положения или определенного перемещения машины относительно текущего ряда, который в это время обрабатывается машиной. Для этого модуль 110 руления по дорожке может быть соединен с датчиками 80 и 82 посредством связи 112. Датчики 80, 82 определяют положение машины относительно текущего ряда.
Модуль 110 руления по дорожке также может быть соединен посредством связи 114 с модулем 76 определения положения, который направляет информацию о текущем положении на указанный модуль 110.
Средство 96 руления также содержит модуль 116 переключения, выполненный с возможностью поочередного переключения между модулем 110 руления по дорожке и модулем 100 руления по заданной траектории для руления и перемещения машины. Модуль 116 переключения связан посредством соединительных линий 118, 120 с каждым из модулей 100 и 110 и выполнен с возможностью поочередной передачи одного или другого сигналов, созданных указанными модулями 100 и 110, на двигатель 98 и колеса 36. Что касается рядов, то модуль 110 руления по дорожке также может быть модулем руления по ряду.
Модуль 116 переключения, например, управляется водителем, который может перевести машину во время обработки ряда, например, первого ряда 10, в режим руления по дорожке, в котором машина управляется модулем 110 руления по дорожке, и в конце ряда перевести машину в режим руления по заданной траектории, в котором машина перемещается к начальной позиции следующего ряда, например, второго ряда 12.
Машина работает следующим образом.
Во время обработки первого ряда 10 модуль 110 руления по дорожке посредством модуля 116 переключения связан с колесами 36 и двигателем 98, при этом датчики 80 и 82 определяют положение подлежащей обработке сельскохозяйственной культуры 6. Модуль 110 руления по дорожке создает команды руления, поддерживающие машину в первом ряду 10 и выравнивающие секцию 30 обрезания листвы и секцию 32 корчевания относительно подлежащей уборке сельскохозяйственной культуры.
Во время этого периода, модуль 76 определения положения определяет положение машины относительно участка и последовательно записывает информацию о текущем положении в циклическую буферную память 58. Когда циклическая буферная память 58 заполнена, наиболее давняя информация перезаписывается информацией о добавленном текущем положении.
Когда машина 4 достигает конца ряда 1, или автоматически, или посредством ввода оператором, устройство 50 управления переключается в режим руления по заданной траектории, в котором модуль 60 формирования траектории генерирует начальную позицию ВР машины 4 для следующего ряда (второй ряд 12) на основе параметров из устройства 90 запоминания параметров и на основе информации о самом последнем положении из циклической буферной памяти 58. Модуль 60 формирования траектории может быть выполнен с возможностью использования только части информации о положениях из циклической буферной памяти 58 при определении начальной позиции ВР машины 4 для следующего ряда, причем в этом случае модуль 60 использует только самую последнюю информацию о положениях. Например, когда объем циклического буфера 58 соответствует 100 положениям, модуль 60 формирования траектории может использовать только информацию о 50 последних положениях и не учитывает 50 наиболее давних положений. В качестве альтернативы, модуль 60 формирования траектории использует всю информацию о положениях из циклической буферной памяти 58 при определении начальной позиции ВР машины 4 для следующего ряда.
Частота определения положений, сохраняемых в циклической буферной памяти 58, и/или количество положений, используемых модулем 60 формирования траектории, таковы, что длина траектории соответствует длине от 0 (только одно положение) до 10 м, в частности, от 1 м до 10 м. Например, когда циклический буфер содержит положения с расстоянием 50 см и с учетом последних 5 м, модуль формирования траектории использует информацию, соответствующую последним 10 положениям. Это позволяет сгладить информацию о траектории и уменьшить влияние отсутствия растений или влияние растений, которые расположены вне ряда.
Модуль 60 формирования траектории может быть выполнен с возможностью создания выходного вектора, представляющего собой направление машины или положений машины в конце первого ряда. Выходной вектор создается с использованием информации о положениях из циклической буферной памяти 58. На основе выходного вектора модуль 60 формирования траектории создает входной вектор, являющийся направлением машины или учитываемых частей машины, который, в целом, является вектором, параллельным выходному вектору, но имеет противоположное направление. Входной вектор смещен относительно выходного вектора на основе параметров машины и схемы расположения участка.
В качестве альтернативы, модуль формирования траектории при определении начальной позиции может использовать вспомогательную информацию об участке 2.
Далее, модуль 60 формирования траектории создает заданную траекторию от текущего положения до начальной позиции ВР, и это выполняется так, что перемещение машины к начальной позиции занимает минимум времени и/или обеспечивает минимальную потерю сельскохозяйственной культуры. Далее информацию о целевой траектории направляют от модуля 60 в модуль 100 руления по заданной траектории.
Далее модуль 100 руления по заданной траектории последовательно сравнивает текущее положение машины 4, указанное модулем 76 определения положения, с заданной траекторией, что делается на основе GPS данных и/или на основе другой информации о машине, например, скорости и информации о конфигурации, собранной датчиками, такими как датчики ускорения или скорости, и направляет машину по заданной траектории к начальной позиции ВР.
При достижении начальной позиции ВР, модуль 116 переключения переключает назад на модуль 110 руления по дорожке, который далее направляет машину по второму ряду 12. Переключение назад может быть запущено автоматически или может быть выполнено посредством ввода информации оператором.
Следует отметить, что если в настоящем описании указывается, что некоторый элемент «выполнен с возможностью выполнения некоторого действия», то это означает, что во время использования этот элемент эффективно выполняет указанное действие. Например, если указано, что устройство формирования заданной траектории выполнено с возможностью задания траектории, то это означает, что при работе это устройство эффективно формирует заданную траекторию. Аналогично это относится ко всем другим описываемым элементам.
Элементы, соответствующие изобретению, могут быть реализованы посредством любой комбинации аппаратных и программных компонентов, доступных специалисту в этой области. Эти элементы могут быть реализованы, например, с использованием CPU (центрального процессора), системы-на-кристалле, ASIC (специализированной интегральной схемы); FPGA (программируемой пользователем вентильной матрицы). Описанные связи могут быть любым технически реализуемым соединением, доступным специалисту в рассматриваемой области, например, проводным или беспроводным соединением, оптическим или электрическим соединением.
Помимо описанных выше особенностей, в случае посадки или посева сельскохозяйственной культуры с использованием GPS данных и доступности таких данных, представляющих положение посаженной или посеянной культуры, устройство может содержать устройство создания исходной позиции на основе данных, представляющих положения посаженной или посеянной культуры. В этом случае в начале обработки участка, устройство выработки исходного местоположения вырабатывает исходную позицию, представляющую идеальное или заранее заданную позицию начала обработки участка. Модуль руления к исходной позиции выполнен с возможностью руления машины в исходную позицию на основе только GPS информации о положениях, то есть без информации от датчиков 80/82, так как в это время они не определяют никаких сельскохозяйственных культур или растений.
Также возможно использовать данные посевной машины для полностью автоматической работы по траектории, сохраненной в памяти устройства для задания траектории, которая содержит заранее заданную примерную траекторию для обработки целого участка или существенной части участка, посредством GPS (в том числе для поворотов к следующему ряду) и определить точную траекторию в рамках примерной траектории, что делают на основе датчиков 80/82.
Следует отметить, что вместо GPS может быть использована любая другая система определения положения на основе спутников.
Устройство, соответствующее изобретению, позволяет надежно и экономично обрабатывать участок.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ, система и устройство автоматизации процессов посадки, обработки и уборки сельскохозяйственных делянок | 2023 |
|
RU2837897C2 |
| СПОСОБ НАВИГАЦИИ СЕЛЬСКОХОЗЯЙСТВЕННОГО ТРАНСПОРТНОГО СРЕДСТВА И СЕЛЬСКОХОЗЯЙСТВЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2508622C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА | 2016 |
|
RU2727648C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ СИСТЕМА | 2018 |
|
RU2749561C2 |
| Сельскохозяйственная машина | 2018 |
|
RU2756137C2 |
| СИМУЛЯТОР СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2014 |
|
RU2657617C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ СИСТЕМА | 2018 |
|
RU2749557C2 |
| СПОСОБ РАБОТЫ СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ И СЕЛЬСКОХОЗЯЙСТВЕННАЯ МАШИНА | 2018 |
|
RU2770706C2 |
| Роботизированная сельскохозяйственная платформа | 2024 |
|
RU2834465C1 |
| Способ и система для определения механического состояния сельскохозяйственных угодий | 2020 |
|
RU2802808C2 |

Группа изобретений относится к сельскому хозяйству. Сельскохозяйственная машина содержит устройство управления. Устройство управления сельскохозяйственной машиной, приспособленной для обработки участка полосами по заранее заданной траектории, которая включает в себя по меньшей мере две дорожки, в частности последовательно расположенные первую дорожку и вторую дорожку, и которая имеет начало, определяющее начальную позицию машины. Начальная позиция машины является позицией машины для обработки второй дорожки от ее начала. Устройство управления выполнено с возможностью сбора информации о первой дорожке во время ее обработки машиной и содержит блок задания траектории, выполненный с возможностью создания траектории для направления машины к указанной начальной позиции на основании информации о первой дорожке. Блок задания траектории содержит средство запоминания положений, выполненное с возможностью сохранения информации о последовательных положениях машины при обработке первой дорожки, и модуль формирования траектории, выполненный с возможностью задания траектории на основе информации о последовательных положениях, сохраненных в средстве запоминания положений. Способ обработки участка с использованием сельскохозяйственной машины включает в себя этапы, на которых управляют машиной вдоль первой дорожки обрабатываемой полосы; формируют траекторию к начальной позиции машины; и маневрируют машиной по указанной траектории к начальной позиции. Обеспечивается повышение эффективности направления сельскохозяйственной машины. 3 н. и 10 з.п. ф-лы, 2 ил.
1. Устройство (50) управления сельскохозяйственной машиной, приспособленной для обработки участка (2) полосами по заранее заданной траектории (8), которая включает в себя по меньшей мере две дорожки, в частности последовательно расположенные первую дорожку (10) и вторую дорожку (12), и которая имеет начало (14), определяющее начальную позицию (ВР) машины, отличающееся тем, что начальная позиция (ВР) машины является позицией машины для обработки второй дорожки от ее начала; а устройство управления выполнено с возможностью сбора информации о первой дорожке во время ее обработки машиной и содержит блок (52) задания траектории, выполненный с возможностью создания траектории (56) для направления машины к указанной начальной позиции на основании информации о первой дорожке, при этом блок (52) задания траектории содержит средство (58) запоминания положений, выполненное с возможностью сохранения информации о последовательных положениях машины при обработке первой дорожки, и модуль (60) формирования траектории, выполненный с возможностью задания траектории на основе информации о последовательных положениях, сохраненных в средстве запоминания положений.
2. Устройство по п. 1, отличающееся тем, что средство запоминания положений является циклической буферной памятью (58), в которой информация о последовательных положениях содержит сведения о наиболее позднем положении машины, причем циклическая буферная память выполнена с возможностью перезаписи информации о наиболее позднем положении машины на информацию о новом положении машины, при добавлении в нее этой информации о новом положении машины.
3. Устройство по любому из пп. 1 или 2, отличающееся тем, что блок задания траектории содержит средство (70) определения положения, приспособленное для обнаружения текущего положения машины, в частности, относительно первой дорожки при ее обработке, и выполненное с возможностью записи информации о текущем положении в средство запоминания положений.
4. Устройство по п. 3, отличающееся тем, что средство (70) определения положения содержит приемный GPS модуль (72) и/или датчик (80, 82) положения и модуль (76) определения положения, выполненный с возможностью приема информации о положении от приемного GPS модуля и/или датчика положения.
5. Устройство по п. 4, отличающееся тем, что содержит датчик положения и датчики обнаружения сельскохозяйственной культуры, в частности датчики обнаружения корнеплодов.
6. Устройство по любому из пп. 1 или 2, отличающееся тем, что блок (52) задания траектории содержит устройство (90) запоминания параметров, сохраняющее информацию о параметрах машины, в частности о ее геометрии и/или конфигурации, причем устройство запоминания параметров связано с модулем (60) формирования траектории, выполненным с возможностью задания траектории (56) на основе информации о параметрах.
7. Устройство по любому из пп. 1 или 2, отличающееся тем, что машина содержит средство (96) руления для управления перемещением машины, включающее в себя модуль (100) руления по заданной траектории, выполненный с возможностью выработки команд руления на основе заданной траектории, способных направлять машину к начальной позиции.
8. Устройство по п. 7, отличающееся тем, что средство (96) руления содержит модуль (110) руления по дорожке, выполненный с возможностью выработки команд руления на основе информации о положении, полученной от датчика (80, 82) положения, в частности датчика обнаружения сельскохозяйственной культуры, и/или на основе информации о положении, вырабатываемой модулем (76) определения положения, способствующих поддержанию определенного положения машины относительно текущей дорожки.
9. Устройство по п. 8, отличающееся тем, что средство (96) руления содержит модуль (116) переключения, выполненный с возможностью поочередного переключения между модулем (110) руления по дорожке и модулем (100) руления по заданной траектории для направления машины.
10. Сельскохозяйственная машина (4), содержащая устройство (50) управления по любому из пп. 1-9.
11. Сельскохозяйственная машина по п. 10, которая представляет собой машину для сбора урожая, или машину для посадки или посева сельскохозяйственной культуры, предпочтительно, корнеплодов, или обрабатывающую машину для распыления жидкости по участку.
12. Способ обработки участка с использованием сельскохозяйственной машины по любому из пп. 10 или 11, включающий в себя этапы, на которых:
управляют машиной вдоль первой дорожки (10) обрабатываемой полосы;
формируют траекторию (56) к начальной позиции машины; и
маневрируют машиной (4) по указанной траектории к начальной позиции.
13. Способ по п. 12, в котором дорожки по существу параллельны друг к другу.
| US 2008249692 A1, 09.10.2008 | |||
| WO 2013169919 A1, 14.11.2013 | |||
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ СЕЛЬХОЗМАШИН И АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2424642C2 |
| Способ направления движения машинно-тракторного агрегата и устройство для его осуществления | 1987 |
|
SU1690572A1 |

