Изобретение относится к акустике, в частности к оценке звуковых колебаний, возникающих при работе винтомоторной группы беспилотных летательных аппаратов (БПЛА), и может быть использовано для повышения эффективности мониторинговой миссии.
Для выполнения мониторинговых задач в условиях прямой видимости (до 10 км) используются оптические методы, такие как применение оптических приборов с высоким разрешением или фото- и видеофиксация с высоким разрешением, отслеживание изменения тепловых и магнитных полей. Эффективность применения этих методов существенным образом зависит от ряда объективных факторов, одним из которых является ограниченная видимость, (туман, ночное время суток, угол обзора, не позволяющий просмотреть отдельные детали в глубину сектора и др.). Исходя из этого, целесообразным является применение БПЛА, выполняющего мониторинговые задачи, такие как аэрофотосъемка, видеонаблюдение, отслеживание изменения тепловых и магнитных полей, радиотехническая разведка и многих других функций. При этом в случаях обнаружения нашего БПЛА, возможна его потеря, а значит цена обнаружения БПЛА достаточно велика.
Исторически пассивные акустические локаторы были первыми техническими средствами обнаружения самолетов - пассивного акустического контроля. Особенно эффективным этот метод оказался для обнаружения БПЛА с двигателями внутреннего сгорания. В то же время использование в современных БПЛА подавляющего большинства карбоновых и углепластиковых деталей приводит к снижению их радиолокационной заметности. В связи с чем все более важную роль начинают выполнять акустические средства контроля воздушного пространства. Многие защищаемые объекты оборудованы средствами акустического контроля, которые в сочетании с современными средствами цифровой обработки сигнала дают высокую вероятность заблаговременного обнаружения БПЛА [1].
Задачей настоящего изобретения является создание способа, позволяющего повысить эффективность мониторинговой деятельности с использованием БПЛА, в том числе в различных условиях эксплуатации.
Известен способ обнаружения и противодействия беспилотным летательным аппаратам [2].
На первом этапе этого способа производится первичное обнаружение неизвестного летательного объекта в контролируемой зоне воздушного пространства с помощью первичных средств обнаружения (видеофиксации, остронаправленные акустические антенны - содары, радары), а далее с их помощью определяют пространственные координаты обнаруженного неизвестного летательного объекта, которые отправляют средству управления и классификации для распознания и дальнейшего ведения наблюдения.
Недостатками данного способа являются: существенное снижение вероятности обнаружения БПЛА в плохих погодных условиях и ночью; необходимость иметь весь комплекс первичных средств обнаружения БПЛА, так как отдельно взятые средства обладают меньшей вероятностью обнаружения летательного аппарата.
Наиболее подходящим решением для достижения заявленного технического результата, совпадающим с назначением предлагаемого способа (прототипом), является стенд для исследования изменения шума винта беспилотного летательного аппарата от частоты вращения путем звукового воздействия на систему приемников звуковых волн, которые описаны в патенте на полезную модель [3].
Сущность указанной полезной модели: установка-стенд решает задачу, связанную с определением шума, производимого винтом и оценкой эффективности винтомоторных групп с одновременным увеличением достоверности получаемых результатов. Установка-стенд позволяет определять производимую винтомоторной группой тягу и создаваемый в режиме работы шум, формировать базы данных показателей создаваемой тяги и производимого шума для сравнения характеристик разных моделей винтов и эффективности работы разных винтомоторных групп.
Технический результат, достигаемый с помощью заявленного устройства, это измерение шума, создаваемого винтомоторной группой БПЛА, заключается в возможности оценки винтов для БПЛА по таким показателям, как создаваемые сила тяги и шум в режиме работы, таким образом производить сравнительные испытания винтов с разной геометрией для оценки их характеристик.
Недостатками данного стенда являются: необходимость использования разных, в том числе и современных винтомоторных групп, для постоянной наработки базы данных об акустических характеристиках.
Технический результат, на достижение которого направлен предлагаемый способ, заключается в возможности повысить эффективность мониторинговой деятельности с использованием БПЛА, за счет формирования научно-обоснованной опасной зоны полета путем оповещения оператора БПЛА блоком управления в онлайн-режиме или при использовании написанного полетного задания.
Сущность способа мониторинга при помощи БПЛА заключается в том, что на БПЛА предварительно устанавливается один из известных дальномеров, соответствующего разрешения и массогабаритных характеристик, осуществляется запуск и выполнение мониторинговой задачи, под контролем оператора БПЛА или по заранее написанному полетному заданию, в ходе которой установленный по направлению движения дальномер непрерывно осуществляет измерение расстояния до объектов наблюдения. При достижении опасной дистанции до объекта наблюдения (с высокой вероятностью выявления пассивными акустическими локаторами) на пульте управления БПЛА производится звуковой сигнал, оповещающий оператора БПЛА о нахождении в опасной близости к объекту наблюдения и производится снижение акустической заметности БПЛА, за счет автоматического снижения частоты вращения винтомоторной группы на величину, позволяющую увеличить опасную дистанцию до объекта контроля (также просчитывается программным обеспечением [4]) или прекращение полетного задания, с аналогичным снижением акустической заметности, с фиксацией координаты и возвращением на базу. Эту опасную (слышимую) дистанцию рассчитывают при помощи программы оценки, например, на основе способа обнаружения, измерения дальностей, скоростей и ускорений нескольких малоскоростных низковысотных целей в главном луче импульсно-доплеровских радиолокаторов (Патент на изобретение №2801393 от 08.08.2023 г.) [4].
Сравнительный анализ показал, что предлагаемый способ отличается от наиболее близкого по технической сущности стенда для исследования изменения шума винта беспилотного летательного аппарата [3], в первую очередь, тем, что БПЛА постоянно использует дальномер для определения опасного расстояния до объекта контроля, во-вторых, определение опасной дистанции выполняется по предварительно написанному программному обеспечению, учитывающему тип БПЛА, погодные условия, в третьих, при приближении к опасной дистанции осуществляется звуковой сигнал оператору БПЛА и автоматическое снижение акустической заметности, путем снижения частоты вращения винтомоторной группы, но не ниже скорости, обеспечивающей достаточную подъемную силу, либо прекращается выполнение полетного задания БПЛА с предварительным снижением акустической заметности аналогичным способом, что в совокупности приводит к повышению эффективности мониторинговой деятельности с использованием БПЛА, в том числе за счет сохранения БПЛА.
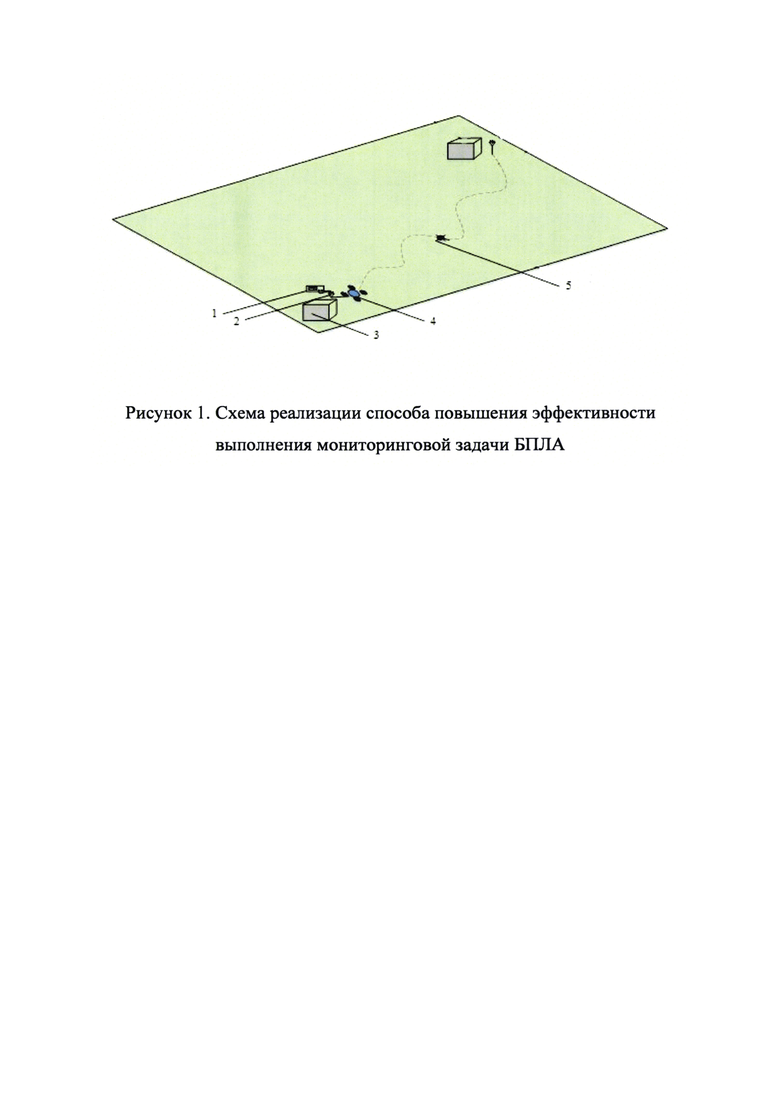
Сущность предлагаемого способа повышения эффективности выполнения мониторинговой задачи БПЛА поясняется рис. 1, на котором изображена схема реализации мониторинга при помощи БПЛА.
Способ может быть реализован следующим образом (рис. 1).
1. Предварительно на БПЛА 1 в направлении поступательного движения устанавливается один из известных дальномеров, с учетом ТТХ и массогабаритных характеристик (например оптические: Nikon PROSTAFF 1000, дальность определения 910 м или RGK D1500 - 1500 м; лазерные: Vector Optics Forester 6×21 - около 1000 м).
2. В программу [4] для расчета опасной дистанции на основе оценки акустических шумов разнотипных БПЛА вносятся данные об используемом БПЛА и погодных условиях (скорость ветра, облачность, высота планируемого полета и пр.). БПЛА 1 с установленным на нем дальномером поднимается с точки старта 2 и движется под управлением оператора или по предварительно написанному полетному заданию 3 в направлении объектов контроля 4, при этом осуществляется непрерывный контроль за расстоянием до объектов контроля 4.
3. При достижении координаты 5, которая будет соответствовать рассчитанному программой опасной акустической дистанции до объекта контроля блок управления БПЛА издаст звуковой сигнал, оповещающий оператора о достижении опасной дистанции до объекта контроля, после чего автоматически снижается акустическая заметность БПЛА, за счет снижения числа оборотов винтомоторной группы на величину, но не ниже необходимой для создания требуемой подъемной силы, далее оператор должен отвести БПЛА 1 на безопасное расстояние и продолжить движение на более безопасном расстоянии или прекратить выполнение мониторинговых задач.
Если же БПЛА двигался по предварительному полетному заданию, то после получения сигнала о достижении координаты 5 будет автоматически снижена акустическая заметность БПЛА аналогичным способом и будет выполнена либо отмена полетного задания, либо переход на другой (менее глубокий) маршрут выполнения мониторинговых задач.
4. Далее БПЛА возвращается на домашнюю (указанную конечную) точку или, если заряда его батареи не хватит для безопасного возвращения, остается у места опасной дистанции.
Возможность осуществления предлагаемого способа подтверждается использованием для его реализации средств, известных до даты приоритета, в том числе на уровне их функционального обобщения. Таким образом, можно предположить, что изобретение соответствует критерию «промышленная применимость».
Предлагаемый способ позволяет повысить эффективность выполнения мониторинговой задачи БПЛА за счет формирования научно-обоснованной опасной зоны для полета путем оповещения оператора блоком управления БПЛА в онлайн-режиме и автоматического снижения акустической заметности или прекращением полетного задания (со снижением акустической заметности в процессе обратного движения) при использовании автоматического режима управления, при пересечении этой опасной зоны (дистанции).
Список документов, цитированных в отчете о поиске:
1. Исследование зависимости звукового давления шума от количества винтов беспилотного летательного аппарата / Машиностроение. Методы исследования и моделирования №4 // Гайворонский О.В., Кабаков В.В., Смирнов М.Р., Голенко П.М., Осипов И.А., Трехлебов А.С. // стр. 3-8.
2. Заявка на изобретение 2019130599 А (Система и способ обнаружения и противодействия беспилотным летательным аппаратам).
3. Патент на полезную модель 205914 U1 (Стенд для исследования изменения шума винта беспилотного летательного аппарата от частоты вращения путем звукового воздействия на систему приемников звуковых волн).
4. Способ обнаружения, измерения дальностей, скоростей и ускорений нескольких малоскоростных низковысотных целей в главном луче импульсно-доплеровских радиолокаторов. Патент на изобретение №2801393 от 08.08.2023 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2837059C1 |
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ ПРИ ДВИЖЕНИИ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2829561C2 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2834270C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2001 |
|
RU2189625C1 |
| Многоразовый беспилотный летательный аппарат в транспортно-пусковом контейнере и способ старта многоразового беспилотного летательного аппарата из транспортно-пускового контейнера | 2019 |
|
RU2714616C1 |
| СПОСОБ ЗАЩИТЫ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА КОПТЕРНОГО ТИПА ОТ УЗКОНАПРАВЛЕННОГО СВЕРХШИРОКОПОЛОСНОГО ИМПУЛЬСНОГО ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2024 |
|
RU2840142C1 |
| Модульный беспилотный летательный аппарат с системой защиты тяговых винтов | 2020 |
|
RU2752110C1 |
| СПОСОБ МОНИТОРИНГА ВОЗДУШНОГО ПРОСТРАНСТВА В ЗОНАХ РАСПРОСТРАНЕНИЯ ОБЛАКОВ ВУЛКАНИЧЕСКОГО ПЕПЛА | 2015 |
|
RU2650850C2 |
| Способ обеспечения централизованного управления группы беспилотных летательных аппаратов с использованием сервера-агрегатора | 2023 |
|
RU2809495C1 |
| ЛЕГКИЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТОЛЕТНОГО ТИПА ДЛЯ ТУШЕНИЯ ПОЖАРОВ В ВЫСОТНЫХ ЗДАНИЯХ | 2023 |
|
RU2807458C1 |
Способ мониторинга при помощи беспилотного летательного аппарата (БПЛА) относится к оценке звуковых колебаний винтомоторной группы БПЛА и применяется для повышения эффективности мониторинга. Сущность заявленного способа заключается в том, что на БПЛА предварительно устанавливают оптический или лазерный дальномер, осуществляют запуск БПЛА и выполнение мониторинговой задачи под контролем оператора БПЛА или по полетному заданию (ПЗ). При этом направленный по ходу движения дальномер непрерывно измеряет расстояния до объектов наблюдения. При достижении опасной дистанции до объекта наблюдения посредством звукового сигнала с пульта управления БПЛА оповещают оператора БПЛА о нахождении в опасной близости, обеспечивают автоматическое снижение акустической заметности БПЛА за счет уменьшения частоты оборотов винтомоторной группы или прекращают выполнение ПЗ с фиксацией координат точки прекращения ПЗ с дальнейшим возвращением БПЛА на базу. Техническим результатом предлагаемого способа является повышение эффективности осуществления мониторинга при помощи БПЛА. 1 ил.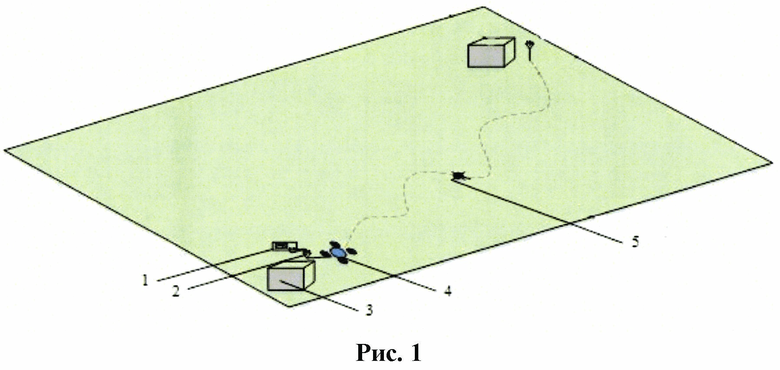
Способ мониторинга при помощи беспилотного летательного аппарата (БПЛА), при котором на БПЛА предварительно устанавливают оптический или лазерный дальномер, осуществляют запуск БПЛА под контролем оператора БПЛА или по полетному заданию для выполнения мониторинговой задачи, отличающийся тем, что при помощи установленного в направлении движения БПЛА дальномера непрерывно осуществляют измерение расстояния до объектов наблюдения и сравнивают их с опасными дистанциями до объектов наблюдения, полученными на основе данных о погодных условиях и оценки акустических шумов разнотипных БПЛА, при этом в случае достижения опасной дистанции до объекта наблюдения посредством блока управления БПЛА подают звуковой сигнал, оповещающий о нахождении БПЛА в опасной близости от объекта наблюдения, обеспечивают снижение акустической заметности БПЛА за счет уменьшения частоты оборотов винтомоторной группы до величины, необходимой для создания подъёмной силы, или прекращают выполнение мониторинговой задачи с возвращением на указанную конечную точку.
| Система и способ обнаружения и противодействия беспилотным летательным аппаратам | 2019 |
|
RU2755603C2 |
| СИСТЕМА ЦЕНТРАЛИЗОВАННОГО ПРОГРАММНОГО УНРАВЛЕНИЯ ГРУППОЙ ОБЪЕКТОВ | 0 |
|
SU205914A1 |
| RU 2791283 С1, 07.03.2023 | |||
| US 20060167599 A1, 27.07.2006. | |||

