ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к области авиационного наблюдения и предназначено для управления воздушным движением и обеспечения безопасности полетов летательных аппаратов (ЛА) путем использования сигналов автоматического зависимого наблюдения с элементами независимого кооперативного наблюдения.
Технический результат изобретения заключается в независимом подтверждении достоверности и независимой проверке точности информации о местоположении ЛА, а также в повышении точности наблюдения при отказах в навигационном обслуживании потребителя глобальной навигационной спутниковой системы, что обеспечивает возможность использования предлагаемой системы наблюдения в качестве единственного источника информации наблюдения для обслуживания воздушного движения.
УРОВЕНЬ ТЕХНИКИ
Традиционно задача управления воздушным движением решается с помощью радаров, установленных на диспетчерских пунктах [1]. Воздушная обстановка, наблюдаемая с помощью радаров, используется для целей управления воздушным движением. Недостатками традиционного способа решения задачи являются низкий темп обновления навигационных данных (4-12 сек), низкая точность определения координат ЛА (сотни метров и более), высокая стоимость наземного оборудования и его недоступность в удаленных районах.
В настоящее время известно другое решение задачи - автоматическое зависимое наблюдение в режиме радиовещания (ADS-B - Automatic Dependent Surveillance - Broadcast) [2]. Автоматическое зависимое наблюдение в режиме радиовещания - это технология, внедряемая в настоящее время по всему миру и позволяющая на борту ЛА, а также на наземном диспетчерском пункте, видеть движение ЛА на экране индикатора воздушной обстановки без использования традиционных радаров. Преимуществами данного способа решения задачи являются высокий темп обновления навигационных данных (1 сек), высокая точность определения координат ЛА (около 1 метра), меньшая стоимость, а также доступность в удаленных районах.
Известны следующие недостатки системы автоматического зависимого наблюдения: зависимость от надлежащей оснащенности автоматическим зависимым наблюдением всех ЛА, что может быть серьезной проблемой, так как требуется установка и сертификация навигационного средства, способного предоставлять информацию о местоположении и скорости наряду с указанием на целостность и точность такой информации; существующие установки при получении данных о местоположении и скорости полагаются исключительно на глобальную навигационную спутниковую систему, поэтому возможны отказы в случаях, когда уровень характеристик или геометрия спутниковой группировки недостаточны для поддержки того или иного вида применения [16].
Также существенный недостаток автоматического зависимого наблюдения заключается в низкой помехоустойчивости и отсутствии защиты от специально организованных помех (например, от ложных целей). В случае применения радара, благодаря большой мощности, а также пространственной и временной селекции сигналов, постановка специально организованных помех существенно затруднена. В системе автоматического зависимого наблюдения передача умышленно недостоверных данных может быть выполнена с помощью несложного оборудования, в результате чего на экране индикатора воздушной обстановки появятся ложные отметки от несуществующих ЛА [3]. Можно предполагать, что со временем будут внедрены криптографические методы защиты системы автоматического зависимого наблюдения в режиме радиовещания, однако в современной аппаратуре они не используются [4].
В настоящее время предложен ряд способов защиты системы автоматического зависимого наблюдения от помех. Известны варианты защиты автоматического зависимого наблюдения от специально организованных помех, использующие наземные многопозиционные системы наблюдения (системы мультилатерации) для определения местоположения источника радиоизлучения [5-7]. Такие варианты нуждаются в разветвленной сети наземных станций или группировке спутников, так как для определения координат этим способом требуется принимать не менее четырех сигналов. Подобный способ можно использовать в сети связанных между собой наземных станций, но затруднительно реализовать на борту ЛА.
Известны способы защиты автоматического зависимого наблюдения с использованием направленных антенн или антенных решеток [8-11]. Защита от помех осуществляется сравнением измеренной угловой координаты источника сигнала, принятого с помощью направленной антенны, с вычисленной угловой координатой на основе использования пространственных координат ЛА и источника сигнала. Такие способы нуждаются в многоэлементной фазированной антенной решетке и многоканальном приемнике на борту ЛА и предполагают использование фазовой информации. Последнее требование чрезвычайно усложняет реализацию приемника, т.к. в системе автоматического зависимого наблюдения сигналы имеют большой динамический диапазон порядка 80 дБ. В стандартных приемниках проблема большого динамического диапазона решается путем применения логарифмического усилителя промежуточной частоты, реализуемого на одной микросхеме. При фазовой обработке требуется многоканальный приемник с линейной обработкой и сложной системой автоматической регулировки усиления. Другим недостатком этого способа защиты при использовании на ЛА являются большие размеры антенной системы.
Известен способ защиты автоматического зависимого наблюдения от помех, в котором выполняется сравнение вычисленной дальности источника сигнала, полученной с использованием пространственных координат ЛА и координат источника, с дальностью, полученной путем измерения задержки распространения сигнала [12, 13]. Этот способ не требует усложнения приемного устройства и может быть использован на борту ЛА.
Известен способ, в котором сравнение дальностей дополняется проверкой направления прихода сигнала, однако такую проверку сложно реализовать на борту ЛА [14].
Известен также способ, затрудняющий создание помех благодаря введению искажений в передаваемое сообщение [15]. Однако этот способ нарушает широковещательный принцип действия автоматического зависимого наблюдения, так как предполагается, что только некоторые потребители могут восстановить точные координаты (использование такого способа ограничивает число потребителей информации системы автоматического зависимого наблюдения).
Известен способ [13], основанный на сравнении вычисленной и измеренной дальности.
Недостаток способа [13] состоит в том, что предлагается способ контроля достоверности данных системы автоматического зависимого наблюдения, предусматривающий совместное использование системы автоматического зависимого наблюдения и глобальной навигационной спутниковой системы, в котором проводят прием сигналов глобальной навигационной спутниковой системы и определение координат и вектора скорости своего летательного аппарата (ЛА), прием сигналов автоматического зависимого наблюдения и определение координат соседних ЛА, вычисление дальностей соседних ЛА по определенным координатам, формирование временной шкалы и измерение дальностей соседних ЛА по времени задержки сигналов автоматического зависимого наблюдения, сравнение разности упомянутых вычисленных и измеренных дальностей с заданным порогом, в случае превышения упомянутой разностью заданного порога проводят формирование сигнала недостоверности данных автоматического зависимого наблюдения и отображение сигнала недостоверности на индикаторе воздушной обстановки, при этом в соответствии с упомянутой временной шкалой формируют сигналы автоматического зависимого наблюдения и проводят их излучение.
Известна система контрактного автоматически-зависимого наблюдения [16]. При использовании контрактного автоматически-зависимого наблюдения ЛА передает свои параметры движения, определенные с помощью глобальной навигационной спутниковой системы и бортовых систем, в систему управления воздушным движением по каналу спутниковой связи. Также ЛА могут принимать через спутниковый канал связи информацию наблюдения о других ЛА.
Недостатки контрактного автоматически-зависимого наблюдения: система является системой зависимого наблюдения, т.е. она рассчитана на то, что ЛА надлежащим образом оборудован для правильной передачи данных (требуется установка дополнительной авионики); рабочие характеристики могут ограничиваться предельными параметрами средств связи; передача каждого сообщения может требовать высоких расходов, поскольку данные передаются поставщиком услуг линии передачи данных; необходимость проверки точности передаваемых данных на случай отказа глобальной навигационной спутниковой системы. В результате частоту обновления данных обычно стараются уменьшить для сокращения затрат; система не поддерживает бортовую функцию наблюдения (ASA), поскольку сообщения прямо не доступны другим воздушным судам.
Наиболее близким аналогом является способ радиовещательного автоматически зависимого наблюдения [16], который принят за прототип. Способ-прототип заключается в том, что от бортовой аппаратуры глобальной навигационной спутниковой системы и инерциальной навигационной системы на борту ЛА получают данные о местоположении, скорости ЛА и связанные с ними указатели точности и целостности данных, передают с борта ЛА данные о его местоположении (широте и долготе), абсолютной высоте, скорости, опознавательном индексе и другой информации, полученной от бортовых систем. Каждое сообщение о местоположении ADS-В включает указание на качество данных, позволяющее пользователям определить, обеспечивает ли качество информации поддержку предполагаемой функции. Принимают данные наземной станцией приема сигналов автоматического зависимого наблюдения в режиме радиовещания. Передают данные на устройство обработки данных наблюдения, откуда передают данные на систему индикации УВД.
Недостатки прототипа: требуется установка и сертификация навигационного средства, способного предоставлять информацию о местоположении и скорости наряду с указанием на целостность и точность такой информации; существующие установки при получении данных о местоположении и скорости полагаются исключительно на глобальную навигационную спутниковую систему, из-за чего возможны отказы в случаях, когда уровень характеристик или геометрия спутниковой группировки недостаточны для поддержки того или иного вида применения; необходимо предусматривать возможность проверки точности передаваемых данных о местоположении.
При бортовом применении летательные аппараты, оборудованные приемниками автоматического зависимого наблюдения в режиме радиовещания, могут обрабатывать сообщения от других летательных аппаратов для определения воздушной обстановки в рамках обеспечения таких видов применения, как CDTI.
Наиболее близким из числа известных технических решений касательно предлагаемого устройства является устройство реализации технологии автоматического зависимого наблюдения в режиме радиовещания [16], содержащее приемник сигналов спутниковой навигационной системы, инерциальную навигационную систему, приемопередатчик сигналов автоматического зависимого наблюдения в режиме радиовещания, наземную станцию, принимающую сигналы от автоматического зависимого наблюдения в режиме радиовещания, устройство обработки данных наблюдения и систему индикации воздушной обстановки.
Недостатком данного устройства является низкая точность информации наблюдения.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Задачей изобретения является создание способа и устройства, обеспечивающих независимую от глобальной навигационной спутниковой системы оценку местоположения ЛА и подтверждение точности и достоверности передаваемых с ЛА данных, повышение точности наблюдения в случаях полного или частичного отказа спутниковой группировки глобальной навигационной спутниковой системы, когда уровень характеристик или геометрия спутниковой группировки недостаточны для обеспечения требуемых характеристик систем автоматического зависимого наблюдения в режиме радиовещания.
Данная задача решается в способе тем, что с наблюдаемого объекта передают сигналы, содержащие данные о его местоположении в горизонтальной плоскости, высоте, скорости, опознавательном индексе, параметры точности и целостности данных и другую информацию, полученную от бортовых систем, в точках приема сигналов принимают сигналы, выделяют из сигналов переданные данные, проводят комплексную обработку данных наблюдения и отображают обработанные данные о наблюдаемых объектах, причем предварительно определяют координаты точек приема сигналов, в том числе их относительную геометрическую высоту, задают пределы допускаемых погрешностей измерения горизонтальной дальности до объекта и его высоты, от источника метеорологической информации передают на точки приема сигналов данные о температуре и давлении воздуха на разных высотах в районе точки приема сигналов и другую метеорологическую информацию, от источников аэронавигационной и плановой информации получают аэронавигационную и плановую информацию, вместе с передаваемыми с наблюдаемого объекта данными в сигнале на точки приема сигналов передают высокоточное время излучения сигнала и имеющуюся на борту метеорологическую информацию, в том числе, температуру воздуха за бортом наблюдаемого объекта, измеряют время приема сигнала, измеряют наклонную дальность до наблюдаемого объекта, по разности времен передачи и приема сигналов, по барометрической высоте наблюдаемого объекта и температуре воздуха за его бортом, а также температуре и давлении воздуха в районе точки приема сигналов определяют геометрическую высоту наблюдаемого объекта относительно точки приема сигналов, после чего с учетом относительной геометрической высоты точки приема сигналов определяют геометрическую высоту наблюдаемого объекта, по принятым в сигнале координатам объекта и координатам точек приема сигналов вычисляют наклонную дальность между точкой приема сигналов и наблюдаемым объектом по измеренной наклонной дальности и высоте объекта вычисляют горизонтальную дальность до объекта, по горизонтальным дальностям от точек приема сигналов до наблюдаемого объекта и его геометрической высоте оценивают координаты наблюдаемого объекта, при наличии неопределенности оцененных координат объекта по предыстории движения объекта, плановой и аэронавигационной информации выбирают истинные координаты наблюдаемого объекта, по горизонтальной дальности до объекта и заданным пределам допускаемых погрешностей измерения горизонтальной дальности и высоты полета формируют трехмерный кольцевой строб возможного местоположения объекта, вычисляют кольцевые стробы относительно всех точек приема сигналов от объекта, по кольцевым стробам с использованием аэронавигационной и плановой информации определяют трехмерные области возможного местоположения объекта, если принятые в сигнале трехмерные координаты наблюдаемого объекта находятся за пределами областей возможного местоположения наблюдаемого объекта, то при наличии двух и более точек приема для наблюдения используют оцененные координаты наблюдаемого объекта, при наличии одной точки приема формируют сигнал недостоверности данных и отображают сигнал недостоверности на индикаторе воздушной обстановки.
Технический результат достигается за счет введения новых существенных отличий (в способе), заключающихся в предварительном определении координаты точек приема сигналов, в том числе их относительной геометрической высоты, задании пределов допускаемых погрешностей измерения горизонтальной дальности до объекта и его высоты, от источника метеорологической информации передаче на точки приема сигналов данных о температуре и давлении воздуха на разных высотах в районе точки приема сигналов и другой метеорологической информации, от источников аэронавигационной и плановой информации получении аэронавигационной и плановой информации, вместе с передаваемыми с наблюдаемого объекта данными в сигнале на точки приема сигналов передаче высокоточного времени излучения сигнала и имеющейся на борту метеорологической информации, в том числе, температуры воздуха за бортом наблюдаемого объекта, измерении времени приема сигнала, измерении наклонной дальности до наблюдаемого объекта, по разности времен передачи и приема сигналов, по барометрической высоте наблюдаемого объекта и температуре воздуха за его бортом, а также температуре и давлении воздуха в районе точки приема сигналов определении относительной геометрической высоты наблюдаемого объекта относительно точки приема сигналов, после чего с учетом относительной геометрической высоты точки приема сигналов определении геометрической высоты наблюдаемого объекта, по принятым в сигнале координатам объекта и координатам точек приема сигналов вычислении наклонной дальности между точкой приема сигналов и наблюдаемым объектом по измеренной наклонной дальности и высоте объекта вычислении горизонтальной дальности до объекта, по горизонтальным дальностям от точек приема сигналов до наблюдаемого объекта и его геометрической высоте оценке координат наблюдаемого объекта, при наличии неопределенности оцененных координат объекта по предыстории движения объекта, плановой и аэронавигационной информации выборе истинных координат наблюдаемого объекта, по горизонтальной дальности до объекта и заданным пределам допускаемых погрешностей измерения горизонтальной дальности и высоты полета формировании трехмерного кольцевого строба возможного местоположения объекта, вычислении кольцевых стробов относительно всех точек приема сигналов от объекта, по кольцевым стробам с использованием аэронавигационной и плановой информации определении трехмерных областей возможного местоположения объекта, если принятые в сигнале трехмерные координаты наблюдаемого объекта находятся за пределами областей возможного местоположения наблюдаемого объекта, то при наличии двух и более точек приема для наблюдения использовании оцененных координат наблюдаемого объекта, при наличии одной точки приема формировании сигнала недостоверности данных и отображении сигнала недостоверности на индикаторе воздушной обстановки, что позволяет обеспечить независимую от глобальной навигационной спутниковой системы оценку местоположения ЛА и подтверждение точности и достоверности передаваемых с ЛА данных, а также повысить точность наблюдения в случаях полного или частичного отказа спутниковой группировки глобальной навигационной спутниковой системы.
Устройство авиационного наблюдения для реализации способа согласно изобретению содержит последовательно соединенные приемник сигналов спутниковой навигационной системы, приемопередатчик сигналов автоматического зависимого наблюдения в режиме радиовещания, приемные наземные станции автоматического зависимого наблюдения в режиме радиовещания, устройство обработки данных наблюдения и систему индикации воздушной обстановки. Устройство авиационного наблюдения дополнительно содержит последовательно соединенные комплекс средств автоматизации планирования использования воздушного пространства (КСА ПИВП) и базу аэронавигационных и плановых данных, а также высокоточные часы, базу данных метеорологической информации, датчик давления и датчик температуры, расположенные вблизи приемной наземной станции, и датчик температуры и барометрический высотомер, расположенные на корпусе летательного аппарата (ЛА), при этом выход базы аэронавигационных и плановых данных соединен со входом устройства обработки данных наблюдения, первый вход устройства обработки данных наблюдения соединен с выходом высокоточных часов, а второй вход с выходом базы данных метеорологической информации, первый вход базы данных метеорологической информации соединен с выходом датчика давления, а второй вход соединен с выходом датчика температуры, выход датчика температуры соединен со входом приемопередатчика сигналов автоматического зависимого наблюдения в режиме радиовещания, и выход барометрического высотомера соединен со входом приемопередатчика сигналов автоматического зависимого наблюдения в режиме радиовещания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
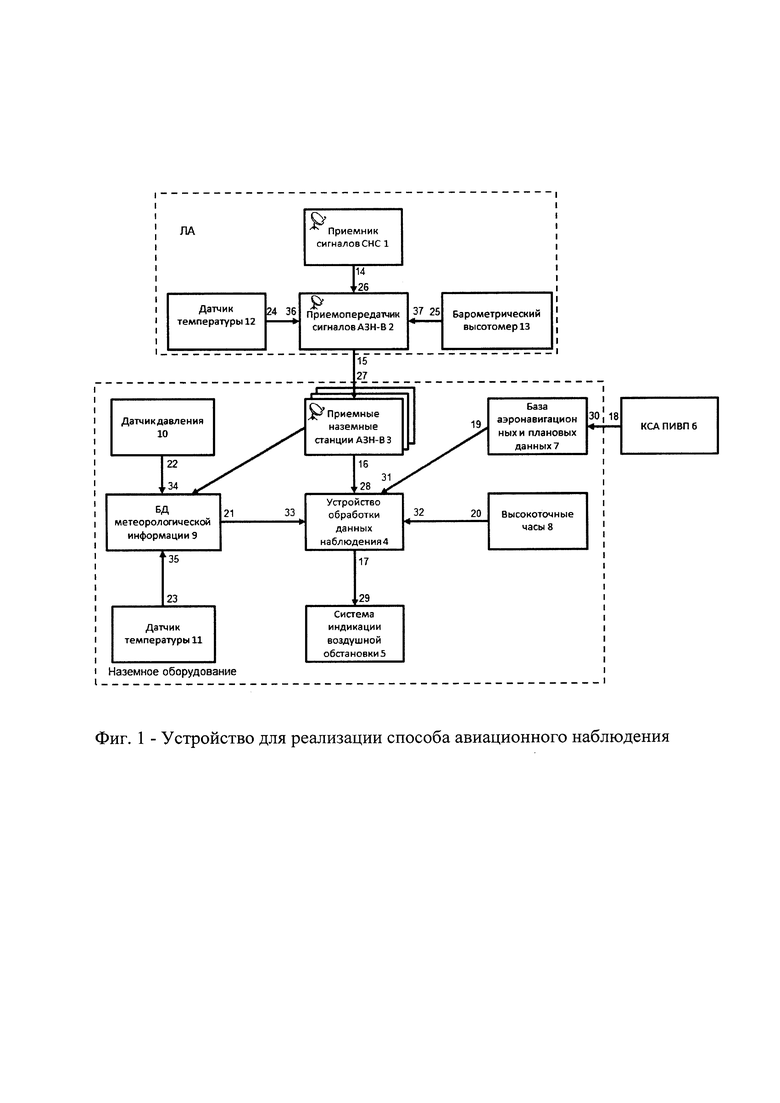
На фиг 1. представлено устройство авиационного наблюдения для реализации способа авиационного наблюдения и введены следующие обозначения:
1 - приемник сигналов спутниковой навигационной системы (СНС);
2 - приемопередатчик сигналов автоматического зависимого наблюдения в режиме радиовещания (АЗН-В);
3 - приемные наземные станции АЗН-В;
4 - устройство обработки данных наблюдения;
5 - система индикации воздушной обстановки;
6 - комплекс средств автоматизации планирования использования воздушного пространства (КСА ПИВП);
7 - база аэронавигационных и плановых данных;
8 - высокоточные часы;
9 - база данных метеорологической информации;
10 - датчик давления, расположенный вблизи приемной наземной станции автоматического зависимого наблюдения в режиме радиовещания;
11 - датчик температуры, расположенный вблизи приемной наземной станции автоматического зависимого наблюдения в режиме радиовещания;
12 - датчик температуры, расположенный на корпусе летательного аппарата;
13 - барометрический высотомер, расположенный на корпусе летательного аппарата.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Предлагаемый способ осуществляют следующим образом:
1. определяют координаты точек хст, уст, hст приема сигналов, в том числе их относительную геометрическую высоту hcт, например, в геодезической или прямоугольной системе координат; здесь хст, уст - прямоугольные координаты точек приема сигналов или широта и долгота, hст - геометрическая высота;
2. задают пределы допускаемых погрешностей измерения горизонтальной θмакс_гор дальности до объекта и его высоты θh;
3. от источника метеорологической информации передают на точки приема сигналов данные о температуре Т и давлении Р воздуха на разных высотах в районе точки приема сигналов и другую метеорологическую информацию;
4. от источников аэронавигационной и плановой информации получают аэронавигационную и плановую информацию, например, аэронавигационная информация содержит данные о маршрутах полетов, задаваемых в виде наборов контрольных точек, через которые должны пролетать воздушные суда и максимально допустимом отклонении ЛА от маршрута по горизонтали и по вертикали; плановая информация представляет собой множество четырехмерных траекторий воздушных судов, задаваемых в виде последовательности ключевых контрольных точек, через которые по плану проходит траектория воздушного судна, и времен их прохождения;
5. с наблюдаемого объекта передают сигналы, содержащие данные о его местоположении в горизонтальной плоскости, высоте, скорости, опознавательном индексе, параметры точности и целостности данных и другую информацию, полученную от бортовых систем; указателями точности могут являться среднеквадратические отклонения соответствующих параметров, в единицах измерения системы Си, целостность может передаваться, например, в диапазоне от 0 до 1, в зависимости от уровня доверия информации;
6. вместе с передаваемыми с наблюдаемого объекта данными в сигнале на точки приема сигналов передают высокоточное время излучения сигнала tизл и имеющуюся на борту метеорологическую информацию, в том числе температуру воздуха за бортом Тб наблюдаемого объекта, например, используя технологию автоматического зависимого наблюдения; в качестве протокола передачи сообщений можно использовать ASTERIX;
7. в точках приема сигналов принимают сигналы, выделяют из сигналов переданные данные, в том числе местоположение, геометрическую и барометрическую высоты, скорость, опознавательный индекс наблюдаемого объекта, параметры точности и целостности данных и другую информацию;
8. измеряют время приема сигнала 
9. измеряют наклонную дальность до наблюдаемого объекта по разности времен передачи и приема сигналов 
где с - скорость света;
10. по барометрической высоте наблюдаемого объекта и температуре воздуха за его бортом, а также температуре и давлении воздуха в районе точки приема сигналов определяют геометрическую высоту наблюдаемого объекта относительно точки приема сигналов, например, с использованием барометрической формулы Лапласа;
11. после чего с учетом относительной геометрической высоты точки приема сигналов определяют геометрическую высоту наблюдаемого объекта;
12. по принятым в сигнале координатам объекта и координатам точек приема сигналов вычисляют наклонную дальность между точкой приема сигналов и наблюдаемым объектом, например, по формуле

13. по измеренной наклонной дальности и высоте объекта вычисляют горизонтальную дальность до объекта rгор по формуле
14. по горизонтальным дальностям от точек приема сигналов до наблюдаемого объекта и его геометрической высоте оценивают координаты наблюдаемого объекта, например, в случае одной точки приема сигналов вероятные координаты наблюдаемого объекта расположены по окружности, образованной радиусом  в случае двух точек приема сигналов будет две точки вероятного местоположения наблюдаемого объекта, в которых пересекаются окружности, образованные
в случае двух точек приема сигналов будет две точки вероятного местоположения наблюдаемого объекта, в которых пересекаются окружности, образованные  в случае трех и более точек приема сигналов неопределенность по координатам будет исключена, координата определится точкой пересечения всех окружностей;
в случае трех и более точек приема сигналов неопределенность по координатам будет исключена, координата определится точкой пересечения всех окружностей;
15. при наличии неопределенности оцененных координат объекта по предыстории движения объекта, плановой и аэронавигационной информации выбирают истинные координаты наблюдаемого объекта, например, путем выбора координаты, которая находится ближе к плановой четырехмерной траектории;
16. по горизонтальной дальности до объекта и заданным пределам допускаемых погрешностей измерения горизонтальной дальности и высоты полета формируют трехмерный кольцевой строб возможного местоположения объекта, например, путем формирования окружностей по радиусу  относительно точки приема сигналов и определения ширины строба на основе заданной погрешности измерения горизонтальной дальности θгор и заданной погрешности оценки геометрической высоты наблюдаемого объекта
относительно точки приема сигналов и определения ширины строба на основе заданной погрешности измерения горизонтальной дальности θгор и заданной погрешности оценки геометрической высоты наблюдаемого объекта
17. вычисляют кольцевые стробы относительно всех точек приема сигналов от объекта;
18. по кольцевым стробам с использованием аэронавигационной и плановой информации определяют трехмерные области возможного местоположения объекта, например, как область пересечения кольцевых стробов и области возможного местоположения наблюдаемого объекта, определяемой путем задания ограничения на максимально допустимое отклонение от плановой четырехмерной траектории;
19. если принятые в сигнале трехмерные координаты наблюдаемого объекта находятся за пределами областей возможного местоположения наблюдаемого объекта, то при наличии двух и более точек приема для наблюдения используют оцененные координаты наблюдаемого объекта;
20. при наличии одной точки приема формируют сигнал недостоверности данных и отображают сигнал недостоверности на индикаторе воздушной обстановки;
21. проводят комплексную обработку данных наблюдения, например, объединяя в один массив выделенные из разных сигналов данные о наблюдаемых объектах;
22. отображают обработанные данные о наблюдаемых объектах, например, на индикаторе воздушной обстановки автоматизированного рабочего места диспетчера.
Устройство авиационного наблюдения для реализации способа авиационного наблюдения работает следующим образом. Из комплекса 6 средств автоматизации планирования использования воздушного пространства (КСА ПИВП) в базу 7 аэронавигационных и плановых данных передается плановая и аэронавигационная информация, откуда аэронавигационная и плановая информация передается в устройство 4 обработки данных наблюдения. После чего в базу 5 данных метеорологической информации от датчика 10 давления и датчика 11 температуры, расположенных вблизи приемной станции, передается информация о давлении и температуре вблизи приемной наземной станции 3 автоматического зависимого наблюдения в режиме радиовещания, соответственно. Далее приемник 1 сигналов спутниковой навигационной системы принимает от спутниковой навигационной системы параметры движения ЛА и передает их в приемопередатчик 2 сигналов автоматического зависимого наблюдения в режиме радиовещания. Одновременно с датчика 12 температуры и барометрического высотомера 13, расположенных на корпусе ЛА, передаются в приемопередатчик 2 сигналов автоматического зависимого наблюдения в режиме радиовещания данные о барометрической высоте и температуре, вблизи ЛА, соответственно. После чего в приемопередатчике 2 сигналов автоматического зависимого наблюдения в режиме радиовещания параметры движения ЛА объединяются с данными о температуре и барометрической высоте вблизи ЛА и объединенные данные в сигнале передают на приемные наземные станции 3 автоматического зависимого наблюдения в режиме радиовещания, которые передают данные о температуре и высоте по координатам ЛА в базу 9 данных метеорологической информации и данные о параметрах движения ЛА на устройство 4 обработки данных наблюдения, в которое сразу после получения сигнала от высокоточных часов 8 поступает высокоточное время приема сигнала, после чего производится интеграция информации, оценка информации наблюдения и ее передача на систему 5 индикации воздушной обстановки, которая отображает данные о наблюдаемых ЛА.
Список литературы
1. Сосновский А.А. и др. Авиационная радионавигация, справочник. - М.: Транспорт, 1990.
2. Автоматизированные системы управления воздушным движением: Новые информационные технологии в авиации: Учебное пособие / P.M. Ахмедов, А.А. Бибутов, А.В. Васильев и др.; под ред. С.Г. Пятко и А.И. Красова. СПб.: Политехника, 2004.
3. CostinandA. Francillon. "GhostintheAir (Traffic): OninsecurityofADS-Bprotocolandpractical attacks on ADS-B devices," conf. Black Hat USA, 2012.
4. Strohmeier M., Lenders V., Martinovic I., On the Security of the Automatic Dependent Surveillance-Broadcast Protocol // IEEE Communication Surveys & Tutorials. 2015, T. 17, N2, p. 1066-1087.
5. Патент US 2008211709 Int. C1. G01S 3/02. Deployable passive broadband aircraft tracking / A.E. Smith, R. Hulstrom, C.A. Evers. Pub. Date 04.09.2008.
6. Патент US 2010149019 Int. CI. G01S 13/93, 1/24, 3/02, 19/24, 5/02. Method and apparatus for ADS-B validation, active and passive multilateration, and elliptical surveillance / A.E. Smith, R. Hulstrom, C.A. Evers, T.J. Breen. Pub. Date 17.06.2010.
7. Патент US 7570214 Int. C1. G01S 13/93, 1/24, 3/02, 19/24, 5/02. Method and apparatus for ADS-B validation, active and passive multilateration, and elliptical surveillance / A.E. Smith, R. Hulstrom, C.A. Evers, T.J. Breen. Pub. Date 04.08.2009.
8. Патент CN 202770990 Int. cl. G01S 5/04, g01S 3/14, G08G 5/00. ADS-B anti-fake-object processing system / Pub. Date 6.03.2013.
9. Патент CN 104360323 Int. Cl. G01S 13/91, 7/36. ADS-B deception jamming restraining method based on cross array / Pub. Date 18.02.2015.
10. Патент US 2011215960 Int. Cl. G01S 13/91, H04B 1/06, 1/18. Radio receiver / M. Stevens, M. Stevens. Pub. Date 08.09.2011.
11. Патент US 2011057830 Int. C1. G01S 13/91. Method for validating aircraft traffic control data / R.G. Sampigethaya, R. Poovendran, L. Bushnell. Pub. Date 10.03.2011.
12. Патент RU 2333538 C2. МПК G08G 5/00, B64D 45/00. Способ индикации положения объектов наблюдения / С.Г. Пятко, Э.Я. Фальков, А.И. Красов и др., заявл. 12.07.2006, опубл. 10.09.2008, Бюл. №25.
13. Патент US 20110140950 Int. C1. G01S 13/74, 13/93, 13/91. Validity check of vehicle position information transmitted over a time-synchronized data link / S. Andersson. Pub. Date 16.06.2011.
14. Патент US 20110163908 Int. C1. G01S 13/74, 1/24. Validity check of vehicle position information / S. Andersson, A. Persson. Pub. Date 07.07.2011.
15. Патент US 2014/0327564 Al Intel. G08G 5/0004. System and method to prevent misuse of aircraft messages / Radhakrishna G. Sampigethaya. Pub. Date 06.11.2014.
16. Doc 9924. Руководство по авиационному наблюдению. Издание третье AN/474. - 2020 / Международная организация гражданской авиации, 429 с.
Группа изобретений относится к способу и устройству контроля местоположения летательных аппаратов. Для контроля местоположения с наблюдаемого объекта передают сигналы о его местоположении от бортовых систем и другую необходимую информацию, которую принимают в определенных точках приема, где выделяют переданные данные, производят их комплексную обработку, в том числе на предмет достоверности данных, отображают данные о наблюдаемых объектах или сигнал их недостоверности. Устройство содержит приемник сигналов спутниковой навигационной системы (1), приемопередатчик сигналов автоматического зависимого наблюдения в режиме радиовещания (2), приемные наземные станции автоматического зависимого наблюдения в режиме радиовещания (3), устройство обработки данных наблюдения 4), систему индикации воздушной обстановки (5), комплекс средств автоматизации планирования использования воздушного пространства (6), базу аэронавигационных и плановых данных (7), высокоточные часы (8), базу данных метеорологической информации (9), датчик давления (10), датчик температуры (11), расположенные вблизи приемной наземной станции (3), датчик температуры (12) и барометрический высотомер (13), расположенные на корпусе летательного аппарата, соединенные определенным образом. Обеспечивается повышение точности полученной информации о местоположении летательного аппарата, в том числе при отказах в навигационном обслуживании потребителя глобальной навигационной спутниковой системы. 2 н.п. ф-лы, 1 ил.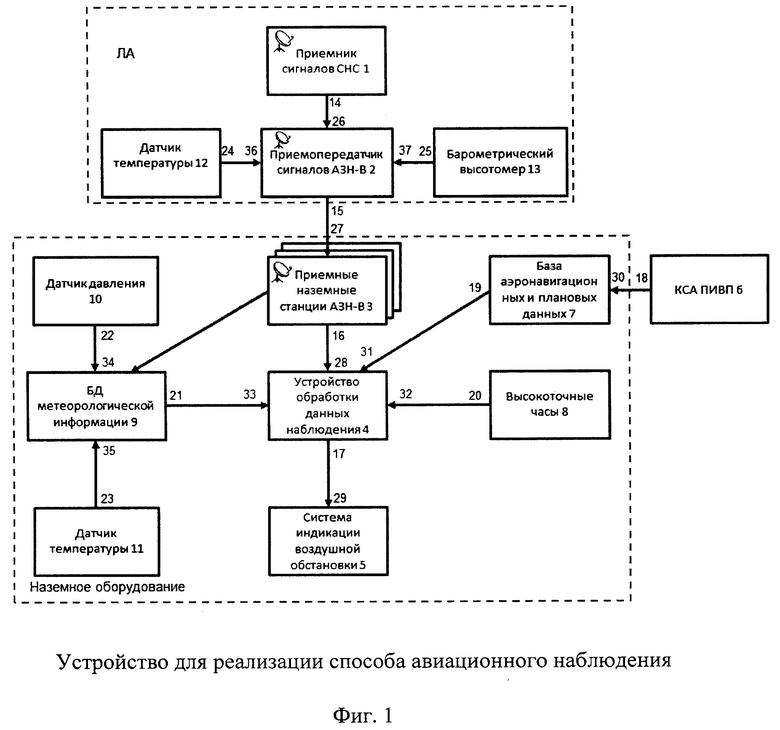
1. Способ контроля местоположения летательных аппаратов в системе организации воздушного движения, заключающийся в том, что с наблюдаемого объекта передают сигналы, содержащие данные о его местоположении в горизонтальной плоскости, высоте, скорости, опознавательном индексе, параметры точности и целостности данных и другую информацию, полученную от бортовых систем, в точках приема сигналов принимают сигналы, выделяют из сигналов переданные данные, проводят комплексную обработку данных наблюдения и отображают обработанные данные о наблюдаемых объектах,
отличающийся тем, что предварительно определяют координаты точек приема сигналов, в том числе их относительную геометрическую высоту, задают пределы допускаемых погрешностей измерения горизонтальной дальности до объекта и его высоты, от источника метеорологической информации передают на точки приема сигналов данные о температуре и давлении воздуха на разных высотах в районе точки приема сигналов и другую метеорологическую информацию, от источников аэронавигационной и плановой информации получают аэронавигационную и плановую информацию, вместе с передаваемыми с наблюдаемого объекта данными в сигнале на точки приема сигналов передают высокоточное время излучения сигнала и имеющуюся на борту метеорологическую информацию, в том числе температуру воздуха за бортом наблюдаемого объекта, измеряют время приема сигнала, измеряют наклонную дальность до наблюдаемого объекта, по разности времен передачи и приема сигналов, по барометрической высоте наблюдаемого объекта и температуре воздуха за его бортом, а также температуре и давлении воздуха в районе точки приема сигналов определяют относительную геометрическую высоту наблюдаемого объекта относительно точки приема сигналов, после чего с учетом относительной геометрической высоты точки приема сигналов определяют геометрическую высоту наблюдаемого объекта, по принятым в сигнале координатам объекта и координатам точек приема сигналов вычисляют наклонную дальность между точкой приема сигналов и наблюдаемым объектом, по измеренной наклонной дальности и высоте объекта вычисляют горизонтальную дальность до объекта, по горизонтальным дальностям от точек приема сигналов до наблюдаемого объекта и его геометрической высоте оценивают координаты наблюдаемого объекта, при наличии неопределенности оцененных координат объекта по предыстории движения объекта, плановой и аэронавигационной информации выбирают истинные координаты наблюдаемого объекта, по горизонтальной дальности до объекта и заданным пределам допускаемых погрешностей измерения горизонтальной дальности и высоты полета формируют трехмерный кольцевой строб возможного местоположения объекта, вычисляют кольцевые стробы относительно всех точек приема сигналов от объекта, по кольцевым стробам с использованием аэронавигационной и плановой информации определяют трехмерные области возможного местоположения объекта, если принятые в сигнале трехмерные координаты наблюдаемого объекта находятся за пределами областей возможного местоположения наблюдаемого объекта, то при наличии двух и более точек приема для наблюдения используют оцененные координаты наблюдаемого объекта, при наличии одной точки приема формируют сигнал недостоверности данных и отображают сигнал недостоверности на индикаторе воздушной обстановки.
2. Устройство контроля местоположения летательных аппаратов в системе организации воздушного движения, содержащее последовательно соединенные приемник (1) сигналов спутниковой навигационной системы, приемопередатчик (2) сигналов автоматического зависимого наблюдения в режиме радиовещания, приемные наземные станции (3) автоматического зависимого наблюдения в режиме радиовещания, устройство (4) обработки данных наблюдения и систему (5) индикации воздушной обстановки,
отличающееся тем, что дополнительно содержит последовательно соединенные комплекс (6) средств автоматизации планирования использования воздушного пространства и базу (7) аэронавигационных и плановых данных, а также высокоточные часы (8), базу (9) данных метеорологической информации, датчик (10) давления и датчик (11) температуры, расположенные вблизи приемной наземной станции (3), и датчик (12) температуры и барометрический высотомер (13), расположенные на корпусе летательного аппарата, при этом выход (19) базы (7) аэронавигационных и плановых данных соединен со входом (31) устройства (4) обработки данных наблюдения, первый вход (32) устройства (4) обработки данных наблюдения соединен с выходом (20) высокоточных часов (8), а второй вход (33) с выходом (21) базы (9) данных метеорологической информации, первый вход (34) базы (9) данных метеорологической информации соединен с выходом (22) датчика (10) давления, а второй вход (35) соединен с выходом (23) датчика (11) температуры, выход (24) датчика (12) температуры соединен со входом (36) приемопередатчика сигналов автоматического зависимого наблюдения в режиме радиовещания, и выход (25) барометрического высотомера (13) соединен со входом (37) приемопередатчика (2) сигналов автоматического зависимого наблюдения в режиме радиовещания.
| СПОСОБ КОНТРОЛЯ ДОСТОВЕРНОСТИ ДАННЫХ СИСТЕМЫ АВТОМАТИЧЕСКОГО ЗАВИСИМОГО НАБЛЮДЕНИЯ | 2017 |
|
RU2667494C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ АВИАЦИОННЫМИ БЕСПИЛОТНЫМИ СИСТЕМАМИ | 2016 |
|
RU2647390C1 |
| EP 2843646 B1, 18.05.2016 | |||
| US 6522295 B2, 18.02.2003 | |||
| ФОНТАННОЕ ОБОРУДОВАНИЕ УСТЬЯ СКВАЖИНЫ | 2018 |
|
RU2684299C1 |
