Настоящее изобретение касается способа и системы контроля автоматической посадки/взлета беспилотного летательного аппарата на круглую посадочную сетку платформы, в частности, морской платформы.
Как известно, уже многие годы стоит проблема контроля посадки/взлета беспилотного летательного аппарата на палубе платформы, в частности, морской платформы.
В частности, такой контроль должен быть обеспечен, например, при волнении на море на морской платформе ограниченного размера, например типа корвета, причем при любом размере беспилотного летательного аппарата, который тоже может иметь ограниченные размеры и движения которого поэтому имеют высокую частоту.
Уже было предложены способы автоматического контроля этого типа, в которых применяют, например, лазерные средства, средства GPS, оптические или другие средства.
Эти различные средства позволяют начать посадку беспилотного летательного аппарата на палубу согласно стратегиям посадки, которые меняются в зависимости от различных известных технических решений.
Так, например, уже предложенная стратегия посадки состоит в постоянном автоматическом отслеживании положения беспилотного летательного аппарата по отношению к палубе платформы.
Другие стратегии посадки состоят в предсказании отдельного положения палубы, например, на гребне волны, чтобы начать посадку.
Другие стратегии состоят в подаче команды на посадку при минимальных значениях скорости перемещения палубы.
Однако ни одно из предложенных решений не дает удовлетворительных результатов, в частности, при волнении на море.
Задачей настоящего изобретения является решение этих проблем.
В связи с этим, объектом настоящего изобретения является способ автоматического контроля посадки/взлета беспилотного летательного аппарата на круглой посадочной сетке платформы, в частности, морской платформы, содержащий следующие этапы:
- этап отслеживания перемещения сетки,
- этап вычисления среднего положения сетки,
- этап вычисления предсказаний положения сетки,
- этап вычисления минимальных значений скорости перемещения сетки,
- этап определения положения беспилотного летательного аппарата, при этом:
- если беспилотный летательный аппарат не может следовать за перемещением сетки и если перемещение сетки является ограниченным, то есть меньше ее радиуса, применяют стратегию посадки путем отслеживания среднего положения сетки, тогда как, если перемещение сетки является значительным, то есть превышающим радиус сетки, применяют стратегию посадки путем позиционирования по минимальным значениям скорости сетки; и
- если беспилотный летательный аппарат может следовать за перемещением сетки и если перемещение сетки является ограниченным, то есть меньше ее радиуса, применяют стратегию посадки путем отслеживания среднего положения сетки, а, если перемещение сетки является значительным, то есть превышающим радиус сетки, применяют стратегию посадки путем отслеживания предсказанного положения сетки в момент посадки на палубу.
Согласно другим аспектам изобретения, способ и система автоматического контроля посадки на палубу/взлета беспилотного летательного аппарата содержат следующие признаки:
- способ содержит этап контроля динамических условий по скорости и относительному положению платформы и беспилотного летательного аппарата, этап проверки, чтобы беспилотный летательный аппарат находился точно на вертикали к сетке, и этап проверки, чтобы предсказанное положение сетки, когда он завершит свое снижение, находилось точно под беспилотным летательным аппаратом, чтобы можно было подать команду на посадку беспилотного летательного аппарата,
- перед самой фазой посадки на палубу способ содержит фазу встречи между беспилотным летательным аппаратом и платформой в заданной географической точке за кормой платформы, после которой следует фаза захода на посадку, во время которой траекторию захода на посадку в основном ориентируют по среднему курсу перемещения платформы, чтобы осуществить заход на посадку со стороны ее кормы,
- способ содержит этап проверки условий относительного положения платформы перед подачей команды на взлет беспилотного летательного аппарата, и
- этап контроля условий относительного положения состоит в вычислении предсказаний бортового и килевого крена платформы и в проверке, чтобы эти предсказания бортового и килевого крена платформы находились в заданных пределах пороговых значений в течение времени, необходимого для взлета.
Объектом настоящего изобретения является также система для применения этого способа.
Настоящее изобретение будет более очевидно из нижеследующего описания, представленного в качестве примера, со ссылками на прилагаемые чертежи, на которых:
фиг.1 и 2 - вид сбоку и сверху морской платформы и траектории захода на посадку беспилотного летательного аппарата;
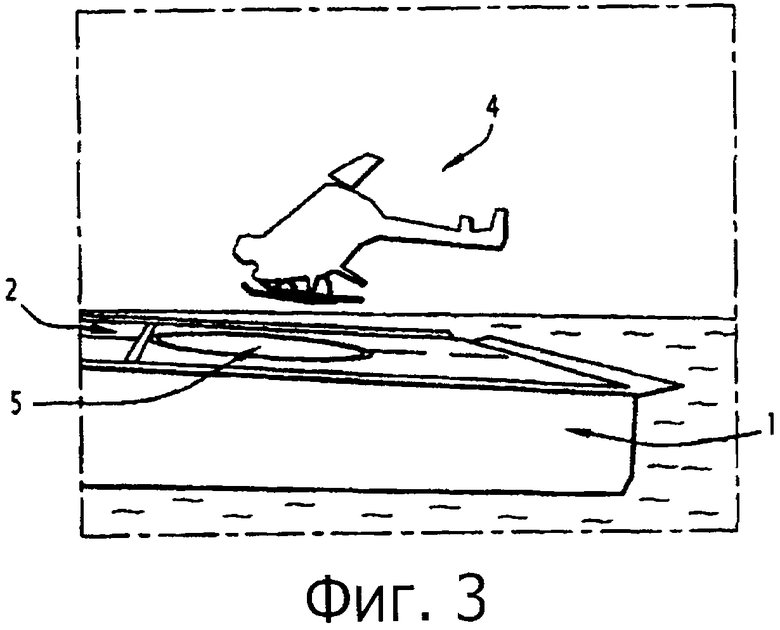
фиг.3 - посадка на палубу такого беспилотного летательного аппарата;
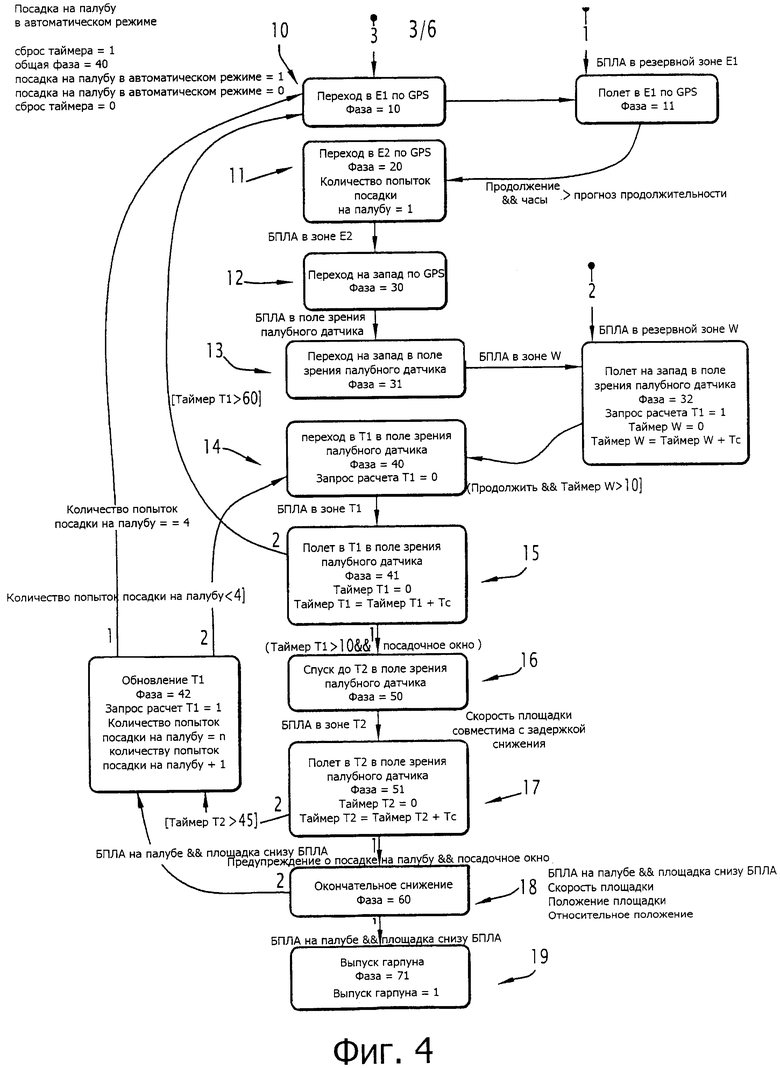
фиг.4 - диаграмма состояния способа автоматической посадки на палубу в соответствии с настоящим изобретением;
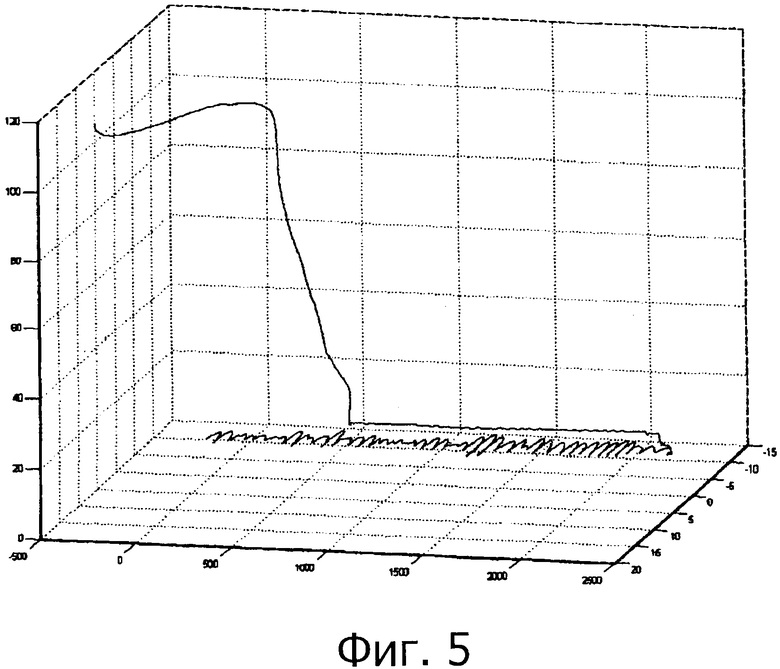
фиг.5 и 6 - моделирование касаний с палубой, полученное при помощи способа контроля в соответствии с настоящим изобретением;
фиг.7 - диаграмма состояния способа автоматического взлета в соответствии с настоящим изобретением.
На фиг.1, 2 и 3 показан способ автоматической посадки на палубу беспилотного летательного аппарата на круглую посадочную сетку морской платформы.
Эта платформа обозначена на фигурах общей позицией 1 и содержит зону посадки, обозначенную общей позицией 2, оборудованную сеткой, предназначенной для установки на ней классического крюка для удержания на месте беспилотного летательного аппарата в момент его посадки.
По сути дела способ контроля в соответствии с настоящим изобретением состоит в приведении беспилотного летательного аппарата в поле, близкое к платформе, при помощи данных географической локализации этой платформы, затем в автоматическом управлении скоростью беспилотного летательного аппарата относительно этой платформы при помощи датчика движений высокой частоты, например, типа оптического датчика посадки на палубу, чтобы обеспечить его безопасную посадку на посадочную сетку платформы.
Для этого производят обработку измерений положения и скорости платформы для выработки траектории захода на посадку беспилотного летательного аппарата, затем обрабатывают измерения отклонений положения платформы/беспилотного летательного аппарата в сочетании с инерциальными измерениями платформы для выработки конечной траектории посадки беспилотного летательного аппарата.
Вычисленная траектория подобна траектории посадки на палубу вертолета, когда необходимо установить устойчивый режим циркуляции воздуха вокруг надстроек платформы и обеспечить стабильность полета, а также чтобы визуальный контроль безопасности был идентичен контролю для вертолетов, осуществляемому офицерами авиации.
Таким образом, речь идет не только о непрерывном автоматическом отслеживании положения беспилотного летательного аппарата относительно палубы платформы, но также о позиционировании беспилотного летательного аппарата в отдельном месте при общем движении палубы и в последующем выжидании совпадения условий положения, скорости и относительного положения.
Речь не идет также только о предсказании высшей точки волны для осуществления посадки на палубу.
Действительно, краткосрочное предсказание положений и относительных перемещений палубы позволяет только проверить, чтобы условия всегда были соблюдены при касании с палубой, при этом повышение прочности посадочного шасси беспилотного летательного аппарата позволяет компенсировать соответствующие скорости.
Кроме того, относительное расстояние между двумя движущимися объектами, то есть между платформой и беспилотным летательным аппаратом, во время критической фазы посадки отслеживают не с помощью технологии GPS, а, например, при помощи оптических устройств, то есть средств, постоянно имеющихся в наличии, и надежных средств.
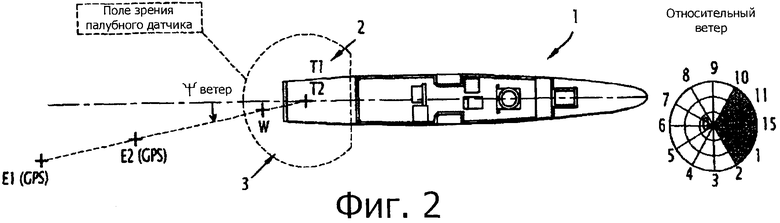
По сути дела, посадка беспилотного летательного аппарата делится на три основные фазы, показанные на фиг.1, 2 и 3.
Этими фазами являются встреча, заход на посадку и посадка.
Встреча беспилотного летательного аппарата с платформой является фазой позиционирования беспилотного летательного аппарата в фиксированной точке, например, в точке GPS в географической системе координат NED (от North East Down).
Эту точку определяют по безопасной высоте сзади платформы в расчетный момент встречи. На фиг.1 и 2 эта точка обозначена Е1.
Заход на посадку является фазой, которая позволяет беспилотному летательному аппарату выйти на палубу в направлении относительного ветра.
Данные средней географической локализации платформы позволяют определить заданную траекторию захода на посадку для беспилотного летательного аппарата путем выравнивания курса двух движущихся объектов, начиная от точки Е1.
Затем траекторию беспилотного летательного аппарата приводят точно по ветру в бесконечности впереди по курсу платформы, если он находится в допустимых габаритных пределах для пары аппарат/платформа. Если этот габарит ветра не соблюдается, командный авиационный мостик платформы не принимает условия по ветру, и корабль должен изменить курс для соблюдения этого габарита ветра.
Эта траектория захода на посадку проходит через точку Е2, показанную на фиг.1 и 2, при этом беспилотный летательный аппарат сближается с платформой по расстоянию и по высоте.
Беспилотный летательный аппарат продолжает сближаться с платформой и входит в поле зрения оптических средств измерения отклонений, установленных на платформе, и на фиг.1 и 2 это поле зрения обозначено общей позицией 3.
После этого начинается фаза точного управления беспилотным летательным аппаратом с целью его посадки на палубу.
Под контролем средств, включающих датчик измерения отклонений, беспилотный летательный аппарат последовательно проходит через заданные положения W, Т1 и Т2 с фазами выжидания, предусмотренными в каждой из этих точек для проверки, чтобы были соблюдены все динамические условия посадки на палубу и, в частности, относительные скорости и углы относительного положения между палубой и беспилотным летательным аппаратом.
При этом применяемая стратегия посадки будет зависеть от перемещений платформы и от динамики беспилотного летательного аппарата.
Так, если беспилотный летательный аппарат не может следовать за перемещением сетки и если перемещение сетки является незначительным, то есть меньше ее радиуса, применяют стратегию посадки путем отслеживания среднего положения сетки, тогда как, если перемещения являются большими, то есть превышающими радиус сетки, применяют стратегию посадки путем позиционирования по минимальным значениям скорости сетки.
Если беспилотный летательный аппарат может следовать за перемещением сетки и если перемещения сетки являются незначительными, то есть меньше ее радиуса, применяют стратегию посадки по среднему положению сетки, а если перемещения сетки являются большими, то есть превышающими радиус сетки, применяют стратегию посадки путем отслеживания предсказанного положения сетки в момент посадки на палубу. Команду на вертикальное снижение подают, когда беспилотный летательный аппарат находится в точке Т2 и одновременно удовлетворены все следующие условия:
1) Соблюдены динамические условия по скорости и относительному положению, и они в основном зависят от прочности посадочного шасси и от высоты центра тяжести беспилотного летательного аппарата.
2) Положение беспилотного летательного аппарата по вертикали относительно сетки измеряют при помощи средств в виде оптического датчика измерения отклонения.
3) Положение сетки под беспилотным летательным аппаратом предсказывают, когда он завершает свое вертикальное снижение, то есть, например, менее чем на пять секунд.
Для наблюдения перемещения сетки и определения стратегии посадки применяют принцип выделения перемещений в средней псевдоинерциальной системе координат платформы, и при краткосрочном предсказании положения сетки используют классические технологии обработки сигнала для статистической идентификации поведения физической системы с использованием оценки коэффициента колебательного фильтра в момент устойчивости, чтобы предсказать положение сетки в псевдоинерциальной системе координат с учетом скорости платформы.
Цифровая обработка коэффициентов фильтра является определяющей, и с учетом случайных составляющих движения платформы эти технологии обеспечивают надежное предсказание на несколько секунд, что позволяет убедиться, что посадка на палубу будет произведена правильно.
Все эти средства уже хорошо известны, и их подробное описание опускается.
Как показано на фиг.3, это позволяет подвести беспилотный летательный аппарат, обозначенный на этой фигуре общей позицией 4, над палубой платформы 1 и, в частности, над ее посадочной сеткой 5.
Сразу после касания с палубой можно активировать средство обеспечения безопасности беспилотного летательного аппарата на палубе, например, такое как крюк в посадочной сетке.
Это показано, например, на фиг.4, из которой видно, что различные команды, передаваемые на беспилотный летательный аппарат и, в частности, на его средства автоматического пилотирования, предписывают ему на этапе 10 выйти в точку Е1, на этапе 11 - выйти в точку Е2, на этапе 12 - выйти в точку W, где контроль за его положением переходит на этапе 13 от системы GPS к оптическому датчику измерения отклонений.
После этого на этапе 14 беспилотный летательный аппарат перемещается в Т1, затем после фазы выжидания на этапе 15 снижается в Т2 на этапе 16 и после фазы выжидания на этапе 17 садится на палубу на этапе 18, после чего на этапе 19 срабатывают средства обеспечения безопасности, например, крюк.
На фиг.5 и 6 показано моделирование траекторий и касаний при посадке в виде развертки моделирования типа Монте-Карло для 50 посадок на палубу при волнении моря в 5 баллов и при волне 165° (15° спереди).
Из этих фигур видно, что из 50 имитаций посадки на палубу 39 посадок оказались успешными с первого раза.
11 посадок находятся в стороне от сетки при первой посадке, и в этом случае беспилотный летательный аппарат должен опять набрать высоту и повторить попытку посадки на палубу.
Надежность этого способа была подтверждена испытаниями в реальных условиях.
Способ в соответствии с настоящим изобретением содержит также этап проверки условий относительного положения платформы до подачи команды на взлет беспилотного летательного аппарата.
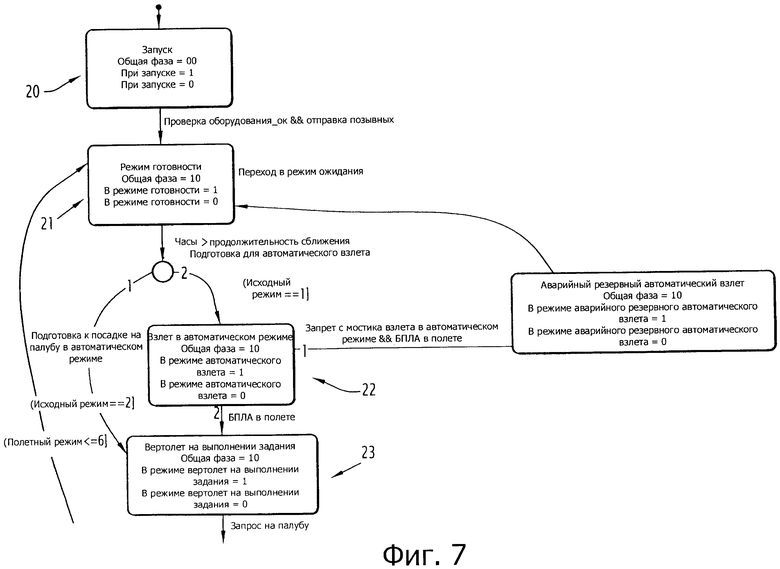
Этот этап контроля содержит вычисление предсказаний бортового и килевого крена и проверку, чтобы в течение времени, необходимого для взлета, эти предсказания бортового и килевого крена находились в пределах заранее определенных пороговых значений, как показано на фиг.7, или чтобы после этапа запуска 20 беспилотный летательный аппарат выдержал время выжидания на этапе 21 перед включением на этапе 22 автоматического взлета, после чего на этапе 23 считается, что беспилотный летательный аппарат находится в полете.
Таким образом, автоматический взлет определяется условиями относительного положения платформы в момент взлета, чтобы избежать взлета беспилотного летательного аппарата под большим углом наклона и чтобы он не произвел взлет с непредсказуемой горизонтальной скоростью.
При этом принцип взлета основан на выходе в точку Е1 после команды на взлет, причем команду на взлет подают только после непрерывного предсказания относительных положений платформы по бортовому и килевому крену в пределах допустимых пороговых значений в течение времени, необходимого для взлета.
Система для применения этого способа содержит для этого определенное число средств сбора данных, например, перемещения сетки и средств вычисления, например, среднего положения этой сетки, или вычисления предсказаний положения сетки и минимальных значений скорости ее перемещения.
Она содержит также средства определения положения беспилотного летательного аппарата и средства передачи команд на беспилотный летательный аппарат и, в частности, на его средства автоматического пилотирования, чтобы обеспечить его посадку на палубу и/или его взлет в условиях полной безопасности.
Эти средства на основе инерциальных датчиков сбора данных, систем GPS, оптических или других устройств имеют классические конструкции, и их подробное описание опускается.
По сути дела эти средства могут иметь любую соответствующую конструкцию и структуру, включая компьютерные программы для осуществления описанных выше различных этапов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПОСАДКОЙ МАЛОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2735196C1 |
| УСТРОЙСТВО ДЛЯ ВЗЛЕТА И ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2694251C2 |
| Способ автономного приземления беспилотного летательного аппарата на мобильную платформу | 2023 |
|
RU2821253C1 |
| Информационно-измерительная и управляющая система посадки группы беспилотных летательных аппаратов на посадочную платформу | 2022 |
|
RU2784221C1 |
| СПОСОБ ТОЧНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА НА ПОСАДОЧНУЮ ПЛАТФОРМУ | 2019 |
|
RU2722521C1 |
| СПОСОБ ПОСАДКИ БПЛА НА МОБИЛЬНУЮ ПЛАТФОРМУ | 2024 |
|
RU2828305C1 |
| Способ посадки беспилотного вертолета на движущееся судно | 2020 |
|
RU2747587C1 |
| Способ посадки группы беспилотных летательных аппаратов со случайной структурой на посадочную платформу | 2021 |
|
RU2776621C1 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |

Изобретение относится к способу и системе контроля автоматической посадки/взлета беспилотного летательного аппарата на круглую посадочную сетку платформы, в частности морской платформы. Технический результат - контроль посадки/взлета беспилотного летательного аппарата при волнении на море. Способ содержит этапы отслеживания движений, вычисления среднего положения, вычисления предсказаний положения и вычисления минимальных значений скорости перемещения сетки (5), а также этап определения положения беспилотного летательного аппарата (4), при этом если беспилотный летательный аппарат не может следовать за перемещением сетки и если перемещение сетки является ограниченным, то есть меньше ее радиуса, применяют стратегию посадки путем отслеживания среднего положения сетки, тогда как, если перемещение сетки является значительным, то есть превышающим радиус сетки, применяют стратегию посадки путем позиционирования по минимальным значениям скорости сетки; и, если беспилотный летательный аппарат (4) может следовать за перемещением сетки и если перемещение сетки является ограниченным, то есть меньше ее радиуса, применяют стратегию посадки путем отслеживания среднего положения сетки, и, если перемещение сетки является значительным, то есть превышающим радиус сетки, применяют стратегию посадки путем отслеживания предсказанного положения сетки в момент посадки на палубу. 2 н. и 4 з.п. ф-лы, 7 ил.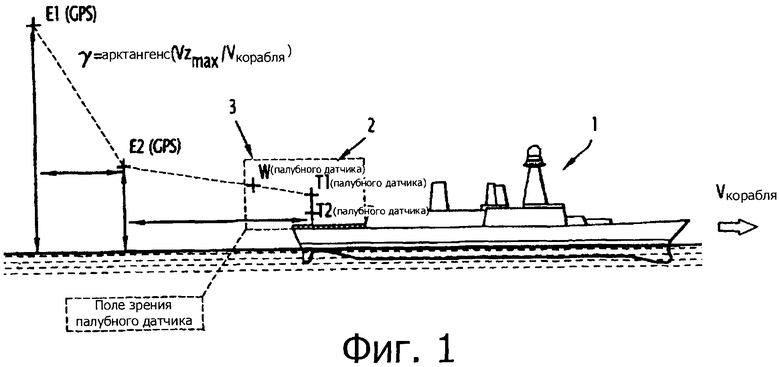
1. Способ контроля автоматической посадки/взлета беспилотного летательного аппарата (4) на круглую посадочную сетку (5) морской платформы (1), характеризующийся тем, что содержит следующие этапы:
этап отслеживания перемещений сетки (5),
этап вычисления среднего положения сетки (5),
этап вычисления предсказаний положения сетки (5),
этап вычисления минимальных значений скорости перемещения сетки (5), и
этап определения положения беспилотного летательного аппарата (4), при этом,
если беспилотный летательный аппарат (4) не способен следовать за перемещениями сетки (5) и если перемещения сетки (5) являются ограниченными, то есть меньше ее радиуса, применяют стратегию посадки путем отслеживания среднего положения сетки, тогда как, если перемещения сетки являются значительными, то есть превышающими радиус сетки, применяют стратегию посадки путем позиционирования по минимальным значениям скорости сетки;
если беспилотный летательный аппарат (4) способен следовать за перемещениями сетки и если перемещения сетки (5) являются ограниченными, то есть меньше ее радиуса, применяют стратегию посадки путем отслеживания среднего положения сетки, а, если перемещения сетки являются значительными, то есть превышающими радиус сетки, применяют стратегию посадки путем отслеживания предсказанного положения сетки в момент посадки на палубу.
2. Способ контроля автоматической посадки/взлета беспилотного летательного аппарата по п.1, дополнительно содержащий этап контроля динамических условий по скорости и относительному положению платформы (1) и беспилотного летательного аппарата (4), этап проверки, чтобы беспилотный летательный аппарат (4) находился точно на вертикали к сетке (5), и этап проверки, чтобы предсказанное положение сетки (5), когда он завершит свое снижение, находилось точно под беспилотным летательным аппаратом, чтобы можно было подать команду на посадку беспилотного летательного аппарата.
3. Способ контроля автоматической посадки/взлета беспилотного летательного аппарата по п.1 или 2, в котором перед самой фазой посадки на палубу способ содержит фазу встречи между беспилотным летательным аппаратом (4) и платформой (1) в заданной географической точке за кормой платформы, после которой следует фаза захода на посадку, во время которой траекторию захода на посадку в основном ориентируют по среднему курсу перемещения платформы, чтобы осуществить заход на посадку со стороны ее кормы.
4. Способ контроля автоматической посадки/взлета беспилотного летательного аппарата по п.1 или 2, отличающийся тем, что содержит этап проверки условий относительного положения платформы (1) перед подачей команды на взлет беспилотного летательного аппарата (4).
5. Способ контроля автоматической посадки/взлета беспилотного летательного аппарата по п.4, в котором этап контроля условий относительного положения состоит в вычислении предсказаний бортового и килевого крена платформы (1) и в проверке, чтобы эти предсказания бортового и килевого крена платформы находились в заданных пределах пороговых значений в течение времени, необходимого для взлета беспилотного летательного аппарата (4).
6. Система контроля автоматической посадки/взлета беспилотного летательного аппарата (4) на круглую посадочную сетку (5) морской платформы (1) для осуществления способа по любому из пп.1-5, содержащая средства сбора данных о перемещениях сетки (5), средства вычисления среднего положения сетки (5), средства вычисления предсказаний положения сетки (5), средства вычисления минимальных значений скорости перемещения сетки (5), средства определения положения беспилотного летательного аппарата и средства проверки условий относительного положения платформы.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| СПОСОБ И УСТАНОВКА ДЛЯ ОБЕСПЕЧЕНИЯ ОПТИЧЕСКОГО КОНТРОЛЯ СОСУДОВ ПО ИХ ПРОФИЛЮ, ВКЛЮЧАЯ ДНО | 2016 |
|
RU2727082C2 |
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2278060C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2200900C2 |

