Изобретение относится к области измерительной техники и может быть использовано для измерения кажущейся скорости в автомате дальности баллистических ракет, а также в инерциальных навигационных системах, как чувствительный элемент по одной из осей, а также при комплексировании интеграторов линейных ускорений различной физической природы.
Известен электролитический интегратор линейных ускорений [БСЭ], состоящий из маятникового компенсационного акселерометра кажущегося ускорения, преобразующего величину кажущегося ускорения в электрический сигнал, который подается на электроды электролитической кюветы, где под действием протекающего электрического тока растворяется и переносится осажденная ранее масса вещества. При полном растворении данного вещества происходит скачок потенциала. При этом электрический ток, протекающий через электролит пропорционален кажущемуся ускорению, а перенесенная при этом масса пропорциональна заряду, а следовательно пропорциональна и кажущейся скорости. Недостатком является большое время готовности устройства при точности 1,6-2,0 км.
Известно устройство для интегрирования линейных ускорений [SU №433404 A1, G01P 7/00, G01R 11/00], содержащее акселерометр с потенциометром и интегратор, выполненный в виде тепловой трубы с капиллярной структурой насыщенной охлаждающей жидкостью, и вакуумированной термоэлектрической батареи с терморезистором, закрепленном на «холодной» стороне термобатареи, «горячая» сторона которой служит теплоприемным концом тепловой трубы, причем питание термобатареи осуществляется через потенциометры акселерометра. Недостатком является низкая точность, обусловленная влиянием внешней температуры.
Известен гироинтегратор линейных ускорений [SU №278138], содержащий трехстепенной гироскоп с жесткой межрамочной коррекцией в виде датчика угла и датчика момента, установленных по оси прецессии. Центр тяжести трехстепенного гироскопа смещен относительно оси подвеса, вследствие чего гироскоп чувствителен к кажущемуся ускорению, вызывающему момент сил инерции, который приводит к прецессии с угловой скоростью пропорциональной величине кажущегося ускорения, а угол прецессии пропорционален кажущейся скорости объекта. Недостатком гироинтегратора линейных ускорений является низкий порог чувствительности, обусловленный трением в осях подвеса, а также большое время готовности, пропорциональное времени разгона ротора гироскопа.
Наиболее близким по совокупности существенных признаков к предлагаемому устройству является гироинтегратор линейных ускорений [RU №2097701 G01C 19/02], содержащий трехстепенной неуравновешенный гироскоп, систему межрамочной коррекции, состоящую из последовательно соединенных датчика угла, закрепленного на оси подвеса, усилителя, датчика угла и датчика момента, установленных на оси чувствительности, и датчик скорости, установленный на главной оси гироскопа, блок сравнения, вычислитель, состоящий из преобразователя напряжения в код, микропроцессора, блока памяти и таймера, согласующего устройства и датчика момента, последовательно соединены цифроаналоговый преобразователь, вход которого соединен со вторым входом вычислителя, электронный ключ, выход которого связан со вторым входом датчика момента, закрепленного на оси подвеса, дифференцирующий блок, вход которого соединен с выходом датчика угла, расположенного на оси чувствительности, а выход соединен с третьим входом вычислителя, выход датчика скорости, установленного на главной оси гироскопа, подключен к четвертому входу вычислителя, второй выход датчика угла, закрепленного на оси подвеса, соединен со вторым входом электронного ключа, второй вход блока сравнения подключен через последовательно соединенные формирователь пилообразного напряжения и блок задержки к шине питания, причем выход датчика угла, закрепленного на оси подвеса, соединен с первым входом усилителя через контактное реле, третий выход цифроаналогового преобразователя соединяется со вторым входом усилителя и выход электронного ключа соединен со вторым входом датчика момента, закрепленного на оси подвеса.
Недостатком такого гироинтегратора линейных ускорений является большое время разгона гиромотора.
Задачей, решаемой предлагаемым изобретением, является разработка интегратора линейных ускорений, позволяющего максимально снизить время готовности и за счет этого повысить точность измерения.
Поставленная задача решается за счет того, что предлагаемый интегратор линейных ускорений, так же, как и известный содержит чувствительный элемент, электронный ключ, первый вход которого соединен с выходом чувствительного элемента, а второй вход соединен с общей шиной, аналогово-цифровой преобразователь, вычислитель, информационные входы которого соединены с выходами аналогово-цифрового преобразователя. Но, в отличие от известного устройства, в предлагаемом интеграторе в качестве чувствительного элемента использован акселерометр кажущегося ускорения, а также он содержит два интегратора аналоговых сигналов, работающих попеременно, входы которых соединены с выходами электронного ключа, аналоговый мультиплексор, входы которого соединены с выходами интеграторов аналоговых сигналов, а выход подключен ко входу аналогово-цифрового преобразователя, при этом первый управляющий выход вычислителя соединен с управляющим входом электронного ключа, второй управляющий выход вычислителя соединен с управляющим входом первого интегратора аналоговых сигналов, третий управляющий выход вычислителя соединен с управляющим входом второго интегратора аналоговых сигналов, четвертый управляющий выход вычислителя соединен с управляющим входом аналогового мультиплексора, а пятый управляющий выход вычислителя соединен с управляющим входом аналогово-цифрового преобразователя.
Достигаемым техническим результатом является минимизация времени готовности за счет отсутствия вращающегося ротора, на разгон которого требуется время, имеющегося у известного устройства.
Предложенное изобретение базируется на том, что интеграл равен сумме интегралов, первая часть которых является результатами интегрирования аналоговых сигналов, а вторая часть является суммой преобразованных в код результатов интегрирования аналоговых сигналов. Таким образом, интеграл является суммой квантованных по уровню и по времени значений, причем квантом времени является период интегрирования интеграторов аналоговых сигналов tИ, которое выбирается исходя из допустимого приращения (кванта) кажущейся скорости.
Например, при задании дискрета приращения кажущейся скорости Vk в 1 м/с и наличии максимального ускорения Wmax=10g, имеем дискрет, по времени равный 10-2 с. Квантование по уровню с максимальной разрядностью, которую обеспечивает высокоразрядный аналогово-цифровой преобразователь, позволяет получить минимальную разрешающую способность и минимальную погрешность суммирования цифровых отсчетов.
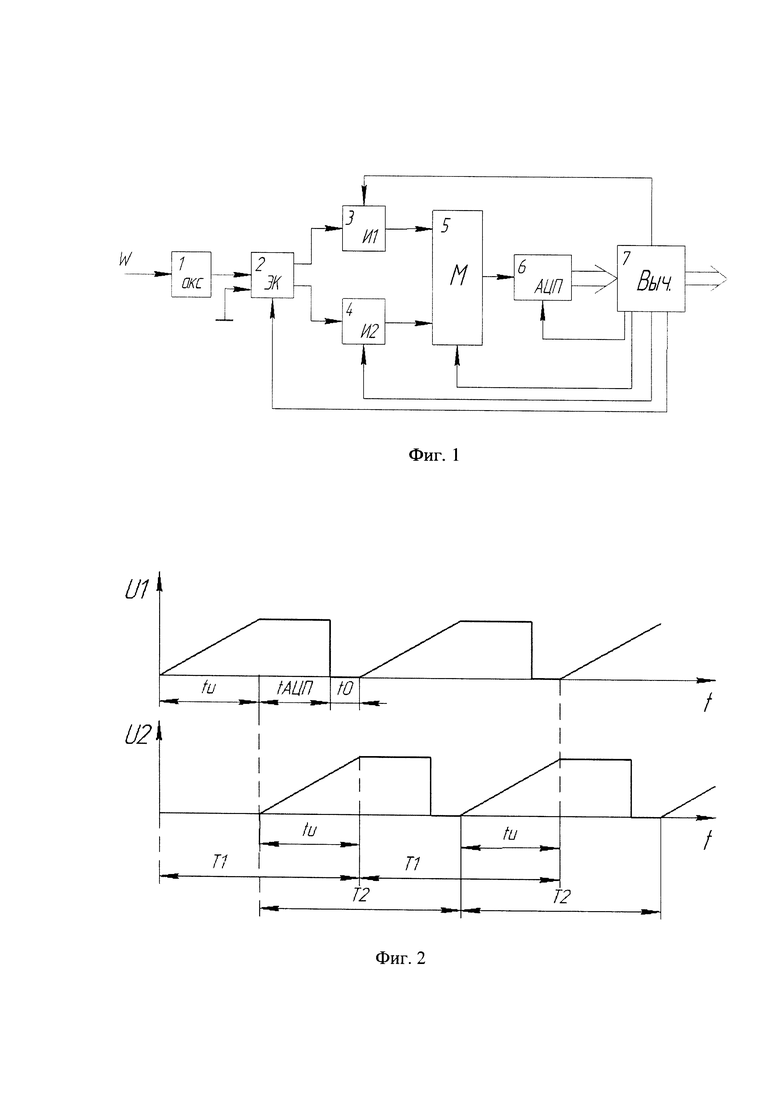
Изобретение поясняется чертежами, где на фиг. 1, где приведена структурная схема предложенного интегратора, а на фиг. 2 приведена временная диаграмма работы устройства.
Предлагаемое устройство состоит из акселерометра кажущегося ускорения 1, выход которого соединен с электронным ключом 2, интеграторов аналоговых сигналов 3 и 4, входы которых попеременно соединяются с выходом электронного ключа 2, а выходы подключены ко входу аналогового мультиплексора 5, выход которого подключен к аналогово-цифровому преобразователю 6, а тот в свою очередь к вычислителю 7. Один из выходов вычислителя 7 подключается к электронному ключу 2, второй и третий выходы соединены с интеграторами 3 и 4, четвертый выход подключается к мультиплексору и, наконец, пятый выход соединяется с АЦП.
Устройство работает следующим образом. Акселерометр 1 формирует электрический сигнал пропорциональный кажущемуся ускорению. На первых двух тактах работы в статическом режиме, определяющим время готовности интегратора, электронный ключ 2 подключает на входы интеграторов аналоговых сигналов 3 и 4 нулевое напряжение, при этом определяется дрейф нулей интеграторов 3 и 4. Мультиплексор 5 поочередно подключает выходы интеграторов аналоговых сигналов 3 и 4 ко входу аналогово-цифрового преобразователя 6.
На фиг. 2, где обозначены: U1 - напряжение на выходе первого интегратора аналоговых сигналов 3, U2 - напряжение на выходе второго интегратора аналоговых сигналов 4, tИ - время интегрирования аналоговых интеграторов 3 и 4, tАЦП - время преобразования аналогово-цифрового преобразователя, t0 - время обнуления интеграторов аналогового сигнала 3 и 4, а также занесения результатов преобразования аналогово-цифрового преобразователя 6 в вычислитель 7, T1 и Т2 - такты работы интеграторов аналоговых сигналов 3 и 4, причем:
Т1=Т2=Т=tИ+tАЦП+t0
На втором такте статического режима контролируются масштабные множители интеграторов аналогового сигнала 3 и 4, базирующиеся на том, что заранее известна проекция ускорения свободного падения на ось чувствительности акселерометра 1. Отклонения масштабных множителей заносятся в память вычислителя 7 и используются при обработке отсчетов аналогово-цифрового преобразования в динамическом режиме. В динамическом режиме электронный ключ 2 подключают ко входам интеграторов аналоговых сигналов 3 и 4 под управлением вычислителя 7 поочередно, выходной сигнал акселерометра 1 подается на время tИ и нулевой сигнал в остальное время Т - tИ. Аналоговый мультиплексор 5 подключает поочередно, под управлением вычислителя 7, выходы интеграторов аналоговых сигналов 3 и 4 ко входу аналогово-цифрового преобразователя 6, затем вычислитель 7 подает команду на запуск аналогово-цифрового преобразователя 6. Вычислитель 7, кроме управления устройством, осуществляет обработку каждого отсчета и их суммирование. Полученная сумма отсчетов является цифровым представлением интеграла от кажущегося ускорения.
Время готовности устройства составляет доли секунды, также серьезно сокращаются массо-габаритные показатели устройства в сравнении с аналогами, что в условиях применения на авиационных объектах играет существенную роль.
Погрешность интегратора линейных ускорений в основном определяется погрешностью акселерометра кажущегося ускорения, так как систематическая погрешность интеграторов аналоговых сигналов (дрейф нуля) исключается в процессе обработки отсчетов. Если использовать сигма-дельта аналогово-цифровые преобразователи, например 32 разрядные от фирмы Texas Instruments, то погрешность будет иметь равномерное распределение на кванте АЦП, а погрешность суммы будет иметь нормальный закон распределения на кванте.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОИНТЕГРАТОР ЛИНЕЙНЫХ УСКОРЕНИЙ | 1995 |
|
RU2097701C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНОЙ И УГЛОВОЙ СКОРОСТЕЙ И УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1994 |
|
RU2097700C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| ДАТЧИК КРЕНА И ТАНГАЖА | 2018 |
|
RU2682589C1 |
| ГИРОАЗИМУТГОРИЗОНТКОМПАС | 2001 |
|
RU2202769C2 |
| ГИРОГОРИЗОНТКОМПАС | 2014 |
|
RU2550592C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1997 |
|
RU2130118C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2000 |
|
RU2171450C1 |
Изобретение относится к области измерительной техники. Интегратор линейных ускорений содержит чувствительный элемент, в качестве которого использован акселерометр кажущегося ускорения, а также содержит два интегратора аналоговых сигналов, работающих попеременно, входы которых соединены с выходами электронного ключа, аналоговый мультиплексор, входы которого соединены с выходами интеграторов аналоговых сигналов, а выход подключен ко входу аналогово-цифрового преобразователя, при этом первый управляющий выход вычислителя соединен с управляющим входом электронного ключа, второй управляющий выход вычислителя соединен с управляющим входом первого интегратора аналоговых сигналов, третий управляющий выход вычислителя соединен с управляющим входом второго интегратора аналоговых сигналов, четвертый управляющий выход вычислителя соединен с управляющим входом аналогового мультиплексора, а пятый управляющий выход вычислителя соединен с управляющим входом аналогово-цифрового преобразователя. Технический результат - минимизация времени готовности, уменьшение масса-габаритных показателей предлагаемого устройства. 2 ил.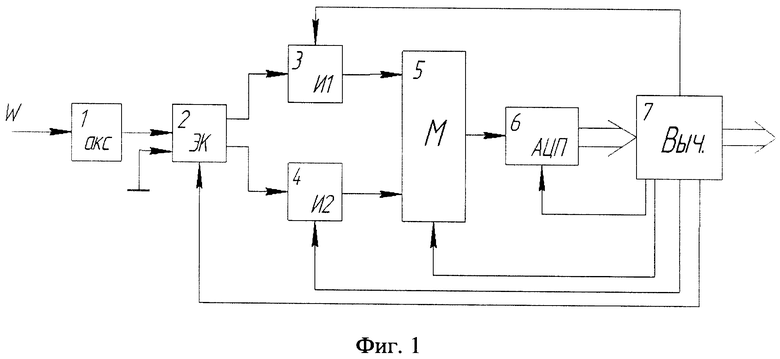
Интегратор линейных ускорений, содержащий чувствительный элемент, электронный ключ, первый вход которого соединен с выходом чувствительного элемента, а второй вход соединен с общей шиной, аналогово-цифровой преобразователь, вычислитель, информационные входы которого соединены с выходами аналогово-цифрового преобразователя, а информационные выходы вычислителя являются выходами интегратора линейных ускорений, отличающийся тем, что в качестве чувствительного элемента использован акселерометр кажущегося ускорения, а также он содержит два интегратора аналоговых сигналов, работающих попеременно, входы которых соединены с выходами электронного ключа, аналоговый мультиплексор, входы которого соединены с выходами интеграторов аналоговых сигналов, а выход подключен ко входу аналогово-цифрового преобразователя, при этом первый управляющий выход вычислителя соединен с управляющим входом электронного ключа, второй управляющий выход вычислителя соединен с управляющим входом первого интегратора аналоговых сигналов, третий управляющий выход вычислителя соединен с управляющим входом второго интегратора аналоговых сигналов, четвертый управляющий выход вычислителя соединен с управляющим входом аналогового мультиплексора, а пятый управляющий выход вычислителя соединен с управляющим входом аналогово-цифрового преобразователя.
| ГИРОИНТЕГРАТОР ЛИНЕЙНЫХ УСКОРЕНИЙ | 1995 |
|
RU2097701C1 |
| СИСТЕМА ИЗМЕРЕНИЯ И КОНТРОЛЯ ПАРАМЕТРОВ ЛИНЕЙНОГО УСКОРЕНИЯ | 2010 |
|
RU2429492C1 |
| RU 93043115 A, 20.12.1996 | |||
| US 7040166 B2, 09.05.2006 | |||
| US 4823626 A, 25.04.1989. | |||

