Изобретение относится к машиностроению, и в частности к платформенным механизмам параллельной структуры, и может найти применение в разных областях техники и преимущественно в удаленных механических устройствах, где необходимо обеспечить надежную и безотказную работу приводных устройств при аварийном выходе из строя их приводных двигателей и невозможности их замены из-за отсутствия доступа к ним человека. Примерами таких областей являются луноходы и марсоходы на других планетах с манипуляторами для отбора проб грунта, МКС и спутниковое группировки с манипуляторами в безвоздушном пространстве, а также другие беспилотные космические аппараты с управляемыми с земли манипуляционными устройствами.
Известен пространственный платформенный манипулятор в виде «Платформы Стюарта», содержащий устройство перемещения круглой подвижной платформы посредством шести приводных двигателей через 12 сложных сферических шарниров (книга Вульфсон И.И. и др. «Механика машин», Москва: Высшая школа, 1996, с. 28, рис. 1.20) - аналог.
Недостатками известного платформенного манипулятора является сложность конструкции и системы управления одновременно всеми шестью приводными двигателями, большие пространственные габариты и низкая эксплуатационная надежность (выход из строя хотя бы одного из шести двигателей приводит к полной неработоспособности всего манипулятора).
Наиболее близким к предлагаемому изобретению является пространственный платформенный манипулятор, содержащий треугольную подвижную платформу с закрепленным на ней рабочим органом, приводимую от трех вращательных двигателей через три сложных сферических шарнира (статья Мирзаев Р.А. и др. «Исследование кинематики манипулятора параллельной структуры (дельта-механизм)» // Вестник Сибирского госуд. аэрокосм. ун-та, 2012, Вып. 4, с. 46-50, рис. 1-4) - прототип.
Недостатками указанного платформенного манипулятора являются сложность конструкции, большие пространственные габариты, низкая жесткость и точность позиционирования, а также низкая эксплуатационная надежность (так как выход из строя хотя бы одного из приводных двигателей приводит к полной неработоспособности всего манипулятора, что исключается применение такого манипулятора, например, в беспилотных летательных аппаратах и космических станциях, где нет возможности замены и ремонта сломанных узлов привода).
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции и повышении ее жесткости, снижении пространственных габаритов манипулятора и повышении его эксплуатационной надежности в труднодоступных для ремонта и удаленных областях применения (например, в беспилотных летательных космических аппаратах и управляемых беспилотниках с земли и на других планетах) - за счет сохранения (при отказе привода) полной работоспособности манипулятора без замены и ремонта его вышедших из строя приводных двигателей платформы.
Получение технического результата достигается за счет того, что манипулятор с опорным основанием и подвижной платформой содержит приводное шарнирно-рычажное устройство, которое выполнено в виде сборки плоской замкнутой кинематической цепи, связывающей между собой опорное основание и подвижную платформу, с пространственной замкнутой кинематической цепью, которая дополнительно подвижно связывает между собой рабочий орган и упомянутую подвижную платформу, а привод манипулятора выполнен с избыточным общим числом приводных двигателей N>W, превышающем число степеней свободы W приводного шарнирно-рычажного устройства манипулятора и снабжен дополнительными аварийными приводными двигателями с автоматической системой их автономного включения, срабатывающей при выходе из строя одного из основных двигателей, число которых равно W.
Плоская замкнутая кинематическая цепь может быть выполнена в виде установленных между опорным основанием и четырехшарнирной подвижной платформой и расположенных по периметру этой платформы четырех подвижных стержневых опор, каждая из которых составлена из двух двухшарнирных соединительных рычагов, при этом каждая из трех упомянутых подвижных стержневых опор выполнена с приводом от основного приводного вращательного двигателя, а четвертая подвижная стержневая опора снабжена одним дополнительными приводным вращательным двигателем для образования манипулятора с W=3 числом степеней свободы перемещения подвижной платформы.
Плоская замкнутая кинематическая цепь может быть выполнена в виде установленных между опорным основанием и пятишарнирной подвижной платформой и расположенных по периметру этой платформы пяти подвижных стержневых опор, каждая из которых составлена из двух двухшарнирных соединительных рычагов, при этом каждая из трех упомянутых подвижных стержневых опор выполнена с приводом от основного приводного вращательного двигателя, а каждая из двух других упомянутых подвижных стержневых опор снабжена дополнительным приводным вращательным двигателем для образования манипулятора с W=3 числом степеней свободы перемещения подвижной платформы.
Плоская замкнутая кинематическая цепь может быть выполнена в виде установленных между опорным основанием и пятишарнирной подвижной платформой и расположенных по периметру этой платформы пяти подвижных стержневых опор, каждая из которых содержит приводную поступательную кинематическую пару, выполненную в виде поворотного пневмоцилиндра или гидроцилиндра, три их этих пар образуют три основных приводных поступательных двигателя, а каждая из двух других поступательных кинематических пар представляет дополнительный приводной поступательный двигатель манипулятора с W=3 числом степеней свободы перемещения подвижной платформы.
Плоская замкнутая кинематическая цепь может быть выполнена в виде установленных между опорным основанием и шестишарнирной подвижной платформой и расположенных по периметру этой платформы шести подвижных стержневых опор, каждая из которых составлена из двух двухшарнирных соединительных рычагов, при этом каждая из трех упомянутых подвижных стержневых опор выполнена с приводом от основного приводного вращательного двигателя, каждая из трех других упомянутых подвижных стержневых опор снабжена дополнительным приводным поступательным двигателем для образования манипулятора с W=3 числом степеней свободы перемещения подвижной платформы, а опорное основание выполнено с возможностью подвешивания, например, на крюке крана через многократный гибкий подвес.
Плоская замкнутая кинематическая цепь может быть выполнена в виде установленных между опорным основанием и шестишарнирной подвижной платформой и расположенных по периметру этой платформы шести подвижных стержневых опор, три их которых составлены каждая из двух двухшарнирных соединительных рычагов и выполнены с приводом от основного приводного вращательного двигателя, а каждая из трех упомянутых подвижных стержневых опор содержит приводную вращательную кинематическую пару, которая представляет дополнительный приводной вращательный двигатель манипулятора с W=3 числом степеней свободы перемещения подвижной платформы.
Плоская замкнутая кинематическая цепь может быть выполнена в виде установленных между опорным основанием и шестишарнирной подвижной платформой и расположенных по периметру этой платформы шести подвижных стержневых опор, каждая из которых содержит приводную поступательную кинематическую пару, выполненную в виде поворотного пневмоцилиндра или гидроцилиндра, три их которых образуют три основных приводных поступательных двигателя, а каждая из трех других поступательных кинематических пар представляет дополнительных приводной поступательных двигатель манипулятора с W=3 числом степеней свободы, выполненного с чередованием между собой основных и дополнительных приводных поступательных двигателей для образования симметричного шестиногого манипулятора.
Пространственная замкнутая кинематическая цепь может быть образована из дополнительной поступательной платформы треугольной формы с установленным на ней рабочим органом, которая кинематически связана с подвижной платформой через три параллельных кривошипа одинаковой длины, один из которых соединен с основным приводным вращательным двигателем, а каждый из двух других кривошипов снабжен дополнительным приводным вращательным двигателем, включаемым при выходе из строя упомянутого основного приводного двигателя данной поступательной платформы.
Пространственная замкнутая кинематическая цепь может быть образована из дополнительной поступательной платформы четырехугольной формы, выполненной с возможностью установочного изменения ориентации закрепленного на ней рабочего органа посредством кинематической связи упомянутой поступательной платформы с подвижной платформой манипулятора через два параллельных кривошипа одинаковой длины и два шарнирно-сочлененных двухшарнирных соединительных рычага, соединенных с основными и дополнительными приводными вращательными и поступательными двигателями, выполненными с возможностью включения дополнительных двигателей в случае выхода из строя соответствующих основных двигателей, а манипулятор снабжен поворотной платформой и выполнен с возможностью установки его опорного основания на упомянутую поворотную платформу для их совместного углового поворота.
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3, фиг. 4, фиг. 5, фиг. 6 и фиг. 7.
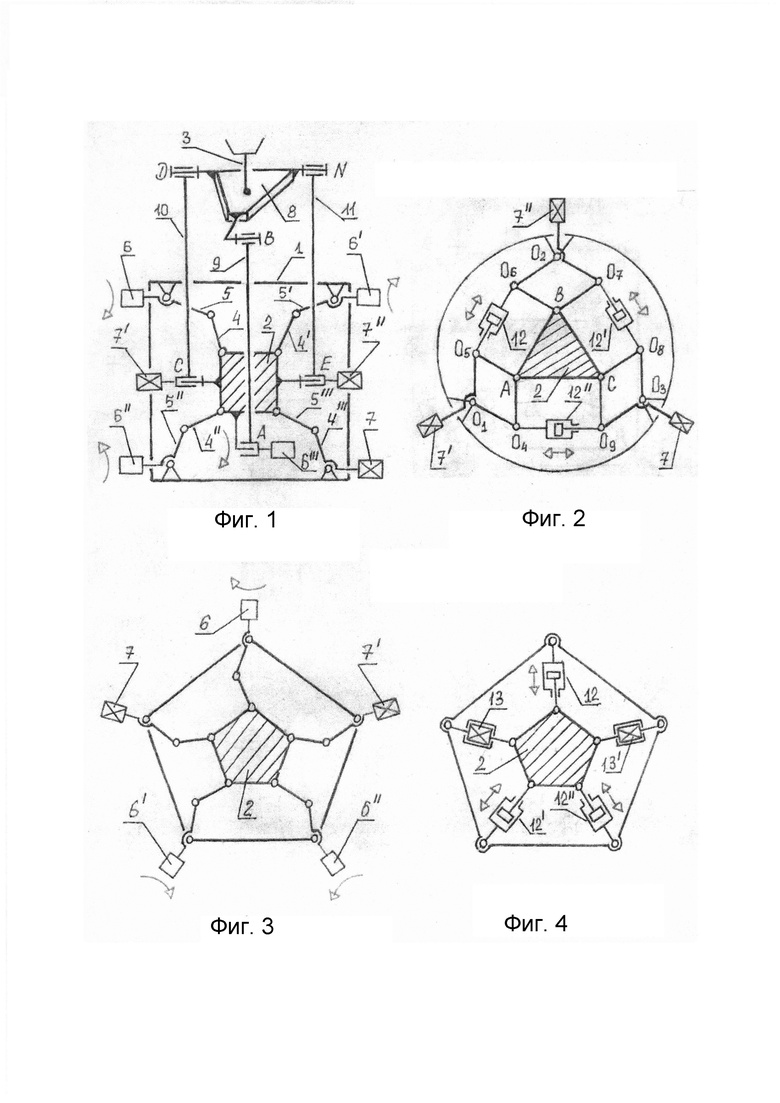
На фиг. 1 изображен общий вид плоско-пространственного платформенного манипулятора, содержащего опорное основание 1, подвижную платформу 2, взаимодействующую с рабочим органом 3, и приводное шарнирно-рычажное устройство, выполненное в виде сборки плоской замкнутой кинематической цепи (связывающий между собой опорное основание 1 с подвижной платформой 2) и пространственной замкнутой кинематической цепи (связывающей подвижную платформу 2 с рабочим органом 3) с применением для этой сборки цилиндрических шарниров с параллельными осями вращения и выполнением привода манипулятора с избыточным общим числом приводных двигателей N>W, превышающем число степеней свободы W приводного шарнирно-рычажного устройства.
Плоская замкнутая кинематическая цепь манипулятора образована из четырехшарнирной подвижной платформы 1 с установленными по ее периметру четырьмя подвижными стержневыми опорами, каждая из которых составлена из двух двухшарнирных рычагов 4 и 5 (4' и 5', 4'' и 5'', 4''' и 5'''). При этом каждая из трех упомянутых опор выполнена с приводом от основного приводного вращательного двигателя 6, 6', 6'', а четвертая из этих опор снабжена одним дополнительным приводным вращательным двигателем 7 для образования манипулятора с W=3 числом степеней свободы перемещения подвижной платформы 2.
Пространственная замкнутая кинематическая цепь манипулятора образована из дополнительной поступательной треугольной платформы 8 с установленным на ней рабочим органом 3, которая кинематически связана с подвижной платформой 2 через три параллельных кривошипа 9, 10 и 11 одинаковой длины АВ=CD=EN. Кривошип 9 соединен с основным приводным вращательным двигателем 6''', а другие два кривошипа 10 и 11 снабжены дополнительными приводными вращательными двигателями 7' и 7'', установленными с возможностью аварийного включения при выходе из строя основного двигателя 6''' в приводе поступательной платформы 8 для сохранения ее дальнейшей работоспособности.
На фиг. 2 представлен вариант выполнения шарнирно-рычажного устройства платформенного манипулятора с приводом трехшарнирной подвижной платформы 2 с тремя подвижными стержневыми опорами посредством трех основных приводных поступательных двигателей 12, 12', 12'' и трех дополнительных приводных вращательных двигателей 7, 7' и 7'', установленных с возможностью аварийного включения при выходе из строя одного из основных приводных поступательных двигателей для сохранения работоспособности подвижной платформы 2 при ее заданном перемещении с W=3 степенями свободы.
На фиг. 3 представлен вариант выполнения платформенного манипулятора с пятишарнирной подвижной платформой 2, по периметру которой установлено пять подвижных стержневых опор с тремя основными приводными вращательными двигателями 6, 6', 6'' и двумя дополнительными приводными вращательными двигателями 7 и 7'.
На фиг. 4 представлен вариант выполнения платформенного манипулятора с пятишарнирной подвижной платформой 2, по периметру которой установлено пять подвижных стержневых опор с тремя основными приводными поступательными двигателями 12, 12', 12'' и двумя дополнительными приводными тоже поступательными двигателями 13 и 13'.
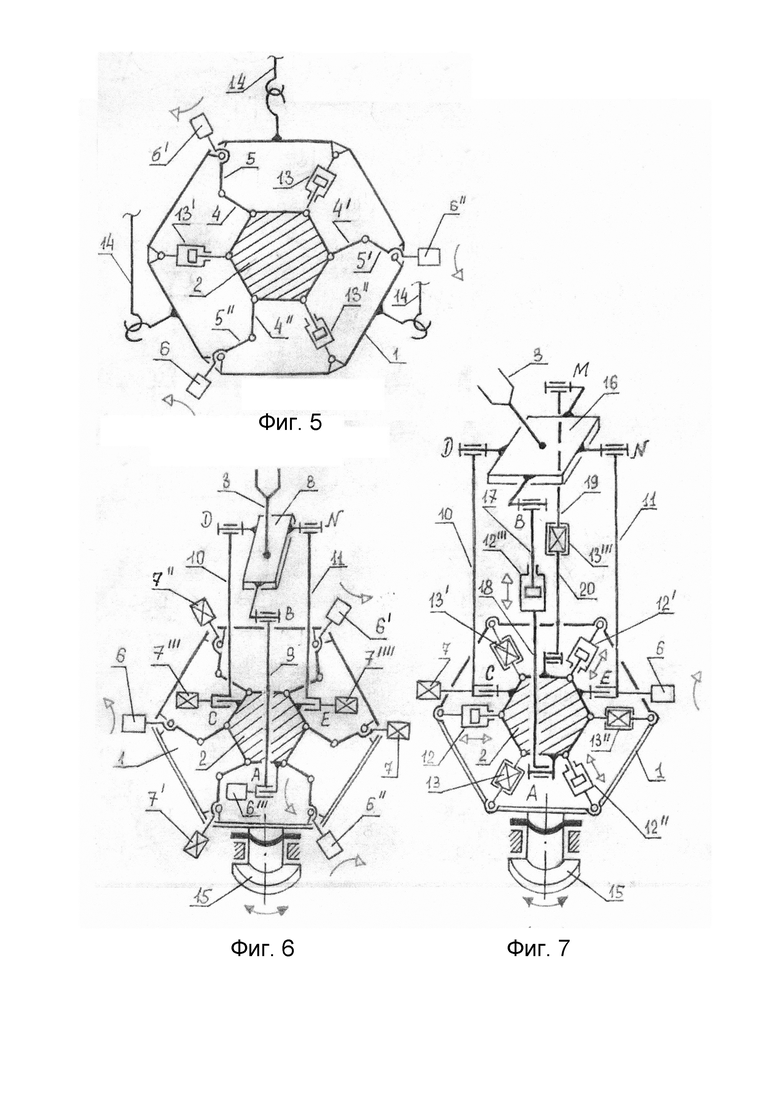
На фиг. 5 представлен вариант выполнения платформенного манипулятора с шестишарнирной подвижной платформой 2, по периметру которой установлены с чередованием между собой шесть подвижных стержневых опор, три из которых выполнены в виде двух двухшарнирных соединительных рычагов 4 и 5 (4' и 5', 4'' и 5'') и снабжены тремя основными приводными вращательными двигателями 6, 6' и 6'', а другие три подвижные опоры выполнены в виде трех дополнительных приводных поступательных двигателей 13, 13' и 13'', представляющих собой приводные поворотные пневмоцилиндры или гидроцилиндры. Подвижная платформа 2 вместе с шестью подвижными стержневыми опорами и опорным основанием 1 образуют плоскую замкнутую кинематическую цепь, в которой опорное основание 1 выполнено с возможностью подвешивания, например, на крюке крана через многократный гибкий подвес 14.
На фиг. 6 представлен вариант выполнения платформенного манипулятора с шестишарнирной подвижной платформы 2, по периметру которой установлено шесть подвижных стержневых опор с тремя основными 6, 6', 6'' и тремя дополнительными приводными вращательными двигателями 7, 7' и 7'', где дополнительные двигатели 7, 7' и 7'' включаются при аварийном выходе из строя основных двигателей 6, 6' и 6''.
Указанная на фиг. 6 шестишарнирная подвижная платформа 2 вместе с шестью подвижными стержневыми опорами, кинематически связанными через шарниры с опорным основанием 1, расположены в одной плоскости и образуют плоскую замкнутую кинематическую цепь c W1=3 степенями свободы.
С другой стороны, подвижная платформа 2 кинематически связана с дополнительной поступательной платформой 8 четырехугольной формы с рабочим органом 3 через три параллельных кривошипа 9, 10 и 11 одинаковой длины АВ=CD=EN, из которых кривошип 9 снабжен основным приводным вращательным двигателем 6''', а два других кривошипа 10 и 11 снабжены дополнительными вращательными приводными двигателями 7''' и 7''''. Указанная на фиг. 6 совокупность подвижной платформы 2, поступательной платформы 8 на выходе манипулятора и связывающих эти платформы трех параллельных кривошипов 9, 10 и 11 образует пространственную замкнутую кинематическую цепь с W2=1 степенью свободы.
Опорное основание 1 может быть установлено на поворотную платформу 15, выполненную с возможностью полного реверсивного поворота с W3=1 степенью свободы.
В представленном на фиг. 6 варианте выполнения платформенного манипулятора общее число степеней свободы рабочего органа 9 равно: WΣ=W1+W2+W3=5.
На фиг. 7 представлен вариант выполнения платформенного манипулятора с шестишарнирной подвижной платформой 2, по периметру которой установлено шесть подвижных стержневых опор с тремя основными 12, 12', 12'' и тремя дополнительными приводными поступательными двигателями 13, 13' и 13'' в виде поворотных пневмоцилиндров или гидроцилиндров. Указанная на фиг. 7 шестишарнирная подвижная платформа 2 вместе с шестью подвижными стержневыми опорами, связанными с опорным основанием 1 через поступательные кинематические пары, расположены в одной плоскости и образуют плоскую замкнутую кинематическую цепь манипулятора с числом W1=3 степеней свободы подвижной платформы 2, раздельно перемещаемой двигателями 12, 12' и 12''.
С другой стороны подвижная платформа 2 кинематически связана с дополнительной поступательной платформой 16 четырехугольной формы с рабочим органом 3 через установленные посредством шарниров В, D, M, N два параллельных кривошипа 10 и 11 одинаковой длины CD=EN, а также через два соединительных рычага 17 (19) и 18 (20), снабженных двумя основными 6, 12''' и двумя дополнительными 7, 13''' приводными вращательными 6, 7 и поступательными 12''', 13''' двигателями. Указанная на фиг. 7 совокупность платформы 2, платформы 16 и связывающих их соединительных рычагов 10, 11, 17 и 18 образует пространственную замкнутую кинематическую цепь с W2=2.
Опорное основание 1 может быть установлено на поворотную платформу 15, выполненную с возможностью полного реверсивного поворота с W3=1 числом степеней свободы. Тогда общее число степеней свободы движения рабочего органа 10 равно: WΣ=W1+W2+W3=6.
Работа представленного манипулятора заключается в следующем:
1. Во всех показанных на фиг. 1-7 вариантах конструкции штатный управляемый режим работы достигается при включении всех основных приводных двигателей (направление их движения указано стрелками), на котором обеспечивается постоянная ориентация рабочего органа во всем пространстве за счет обеспечения его кругового поступательного движения.
2. Совместная работа основных и дополнительных (т.е. избыточных) приводных двигателей приводит к повышению жесткости и точности позиционирования, а также расширяет рабочее пространство манипулятора без мертвых неуправляемых положений.
3. В случае аварийного отказа одного или даже всех основных двигателей манипулятор остается полностью работоспособным за счет включения уже установленных на нем дополнительных приводных двигателей (что расширяет его функциональностью и обеспечивает надежную и безотказную работу манипулятора-робота в удаленных условиях, например, при его эксплуатации в беспилотных космических летательных аппаратах).
Достигаемый в предлагаемом манипулятора положительный эффект заключается в упрощении конструкции (на основе простых шарниров), уменьшении пространственных габаритов (за счет компоновки частично плоской кинематической цепи с частично пространственной цепью), повышении жесткости и безотказности работы в удаленных условиях эксплуатации, например, в беспилотных космических летательных аппаратах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ТРЕХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2774279C1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2758607C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ СКЛАДЫВАЮЩИЙСЯ МАНИПУЛЯТОР | 2021 |
|
RU2759552C1 |
| ПЛАТФОРМЕННЫЙ РОБОТ | 2020 |
|
RU2751778C1 |
| ПРОСТРАНСТВЕННО-ПЛОСКИЙ ПЛАТФОРМЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2781602C1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2022 |
|
RU2784764C1 |
| ТРЁХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2024 |
|
RU2835540C1 |
Изобретение относится к машиностроению, в частности к платформенным механизмам параллельной структуры, и может найти применение в разных областях техники, преимущественно в удаленных механических устройствах. Плоско-пространственный платформенный манипулятор содержит приводное шарнирно-рычажное устройство, которое выполнено в виде сборки плоской замкнутой кинематической цепи, связывающей между собой опорное основание и подвижную платформу, с пространственной замкнутой кинематической цепью, связывающей между собой рабочий орган и упомянутую подвижную платформу. А привод манипулятора выполнен с избыточным общим числом приводных двигателей, превышающим число степеней свободы шарнирно-рычажного устройства манипулятора, и снабжен цилиндрическими шарнирами с параллельными осями вращения. Обеспечивается упрощение конструкции, уменьшение пространственных габаритов, повышение жесткости и обеспечение безотказной работы в аварийных ситуациях в удаленных условиях эксплуатации, например на беспилотных космических летательных аппаратах. 8 з.п. ф-лы, 7 ил.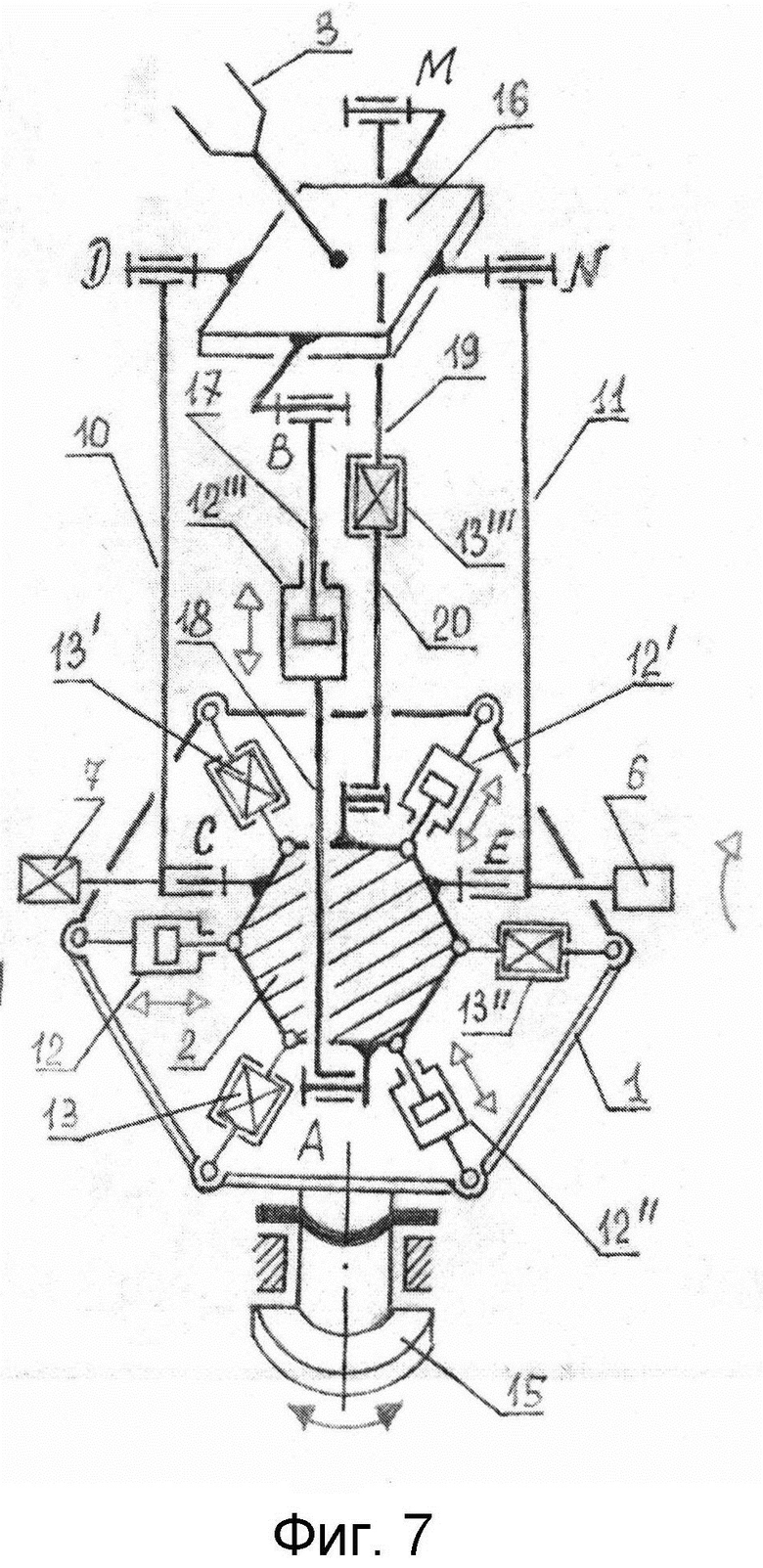
1. Плоско-пространственный платформенный манипулятор с избыточными приводами, преимущественно для беспилотных и труднодоступных космических летательных аппаратов, содержащий опорное основание и подвижную платформу, взаимодействующую с рабочим органом и перемещаемую посредством приводного шарнирно-рычажного устройства, отличающийся тем, что приводное шарнирно-рычажное устройство выполнено в виде сборки плоской замкнутой кинематической цепи, связывающей между собой опорное основание и подвижную платформу, с пространственной замкнутой кинематической цепью, которая подвижно связывает между собой рабочий орган и упомянутую подвижную платформу посредством цилиндрических шарниров с параллельными осями вращения соединяемых рычажных звеньев, а привод манипулятора выполнен с избыточным общим числом приводных двигателей N>W, превышающим число степеней свободы W приводного шарнирно-рычажного устройства, и снабжен дополнительными аварийными приводными двигателями с автоматической системой их автономного включения, срабатывающей при выходе из строя одного из основных двигателей, число которых равно W.
2. Манипулятор по п. 1, отличающийся тем, что плоская замкнутая кинематическая цепь выполнена в виде установленных между опорным основанием и четырехшарнирной подвижной платформой и расположенных по периметру этой платформы четырех подвижных стержневых опор, каждая из которых составлена из двух двухшарнирных соединительных рычагов, при этом каждая из трех упомянутых подвижных стержневых опор выполнена с приводом от основного приводного вращательного двигателя, а четвертая подвижная стержневая опора снабжена одним дополнительным приводным вращательным двигателем для образования манипулятора с W=3 числом степеней свободы перемещения подвижной платформы.
3. Манипулятор по п. 1, отличающийся тем, что плоская замкнутая кинематическая цепь выполнена в виде установленных между опорным основанием и пятишарнирной подвижной платформой и расположенных по периметру этой платформы пяти подвижных стержневых опор, каждая из которых составлена из двух двухшарнирных соединительных рычагов, при этом каждая из трех упомянутых подвижных стержневых опор выполнена с приводом от основного приводного вращательного двигателя, а каждая из двух других упомянутых подвижных стержневых опор снабжена дополнительным приводным вращательным двигателем для образования манипулятора с W=3 числом степеней свободы перемещения подвижной платформы.
4. Манипулятор по п. 1, отличающийся тем, что плоская замкнутая кинематическая цепь выполнена в виде установленных между опорным основанием и пятишарнирной подвижной платформой и расположенных по периметру этой платформы пяти подвижных стержневых опор, каждая из которых содержит приводную поступательную кинематическую пару, выполненную в виде поворотного пневмоцилиндра или гидроцилиндра, три из этих пар образуют три основных приводных поступательных двигателя, а каждая из двух других поступательных кинематических пар представляет дополнительный приводной поступательный двигатель манипулятора с W=3 числом степеней свободы перемещения подвижной платформы.
5. Манипулятор по п. 1, отличающийся тем, что плоская замкнутая кинематическая цепь выполнена в виде установленных между опорным основанием и шестишарнирной подвижной платформой и расположенных по периметру этой платформы шести подвижных стержневых опор, каждая из которых составлена из двух двухшарнирных соединительных рычагов, при этом каждая из трех упомянутых подвижных стержневых опор выполнена с приводом от основного приводного вращательного двигателя, каждая из трех других упомянутых подвижных стержневых опор снабжена дополнительным приводным поступательным двигателем для образования манипулятора с W=3 числом степеней свободы перемещения подвижной платформы, а опорное основание выполнено с возможностью подвешивания, например, на крюке крана через многократный гибкий подвес.
6. Манипулятор по п. 1, отличающийся тем, что плоская замкнутая кинематическая цепь выполнена в виде установленных между опорным основанием и шестишарнирной подвижной платформой и расположенных по периметру этой платформы шести подвижных стержневых опор, три их которых составлены, каждая, из двух двухшарнирных соединительных рычагов и выполнены с приводом от основного приводного вращательного двигателя, а каждая из трех упомянутых подвижных стержневых опор содержит приводную вращательную кинематическую пару, которая представляет дополнительный приводной вращательный двигатель манипулятора с W=3 числом степеней свободы перемещения подвижной платформы.
7. Манипулятор по п. 1, отличающийся тем, что плоская замкнутая кинематическая цепь выполнена в виде установленных между опорным основанием и шестишарнирной подвижной платформой и расположенных по периметру этой платформы шести подвижных стержневых опор, каждая из которых содержит приводную поступательную кинематическую пару, выполненную в виде поворотного пневмоцилиндра или гидроцилиндра, три из которых образуют три основных приводных поступательных двигателя, а каждая из трех других поступательных кинематических пар представляет дополнительный приводной поступательный двигатель манипулятора с W=3 числом степеней свободы, выполненный с чередованием между собой основных и дополнительных приводных поступательных двигателей для образования симметричного шестиногого манипулятора.
8. Манипулятор по п. 1, отличающийся тем, что пространственная замкнутая кинематическая цепь образована из дополнительной поступательной платформы треугольной формы с установленным на ней рабочим органом, которая кинематически связана с подвижной платформой через три параллельных кривошипа одинаковой длины, один из которых соединен с основным приводным вращательным двигателем, а каждый из двух других кривошипов снабжен дополнительным приводным вращательным двигателем, включаемым при выходе из строя упомянутого основного приводного двигателя данной поступательной платформы.
9. Манипулятор по п. 1, отличающийся тем, что пространственная замкнутая кинематическая цепь образована из дополнительной поступательной платформы четырехугольной формы, выполненной с возможностью установочного изменения ориентации закрепленного на ней рабочего органа посредством кинематической связи упомянутой поступательной платформы с подвижной платформой манипулятора через два параллельных кривошипа одинаковой длины и два шарнирно-сочлененных двухшарнирных соединительных рычага, соединенных с основными и дополнительными приводными вращательными и поступательными двигателями, выполненными с возможностью включения дополнительных двигателей в случае выхода из строя соответствующих основных двигателей, а манипулятор снабжен поворотной платформой и выполнен с возможностью установки его опорного основания на упомянутую поворотную платформу для их совместного углового поворота.
| ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ VIP-МАНИПУЛЯТОР | 2019 |
|
RU2722165C1 |
| СПОСОБ ПОЛУЧЕНИЯ ДДТ | 0 |
|
SU170930A1 |
| US 6729202 B2, 04.05.2004 | |||
| US 6425177 B1, 30.07.2002. | |||

