Изобретение относится к точному приборостроению, а именно к способам определения параметров транспортных средств, характеризующих свойства при их движении.
Известен способ контроля остойчивости и скорости судна (1), согласно которому измеряют период бортовой качки, осадки носом и кормой, скорость судна, глубину акватории, длину волны на море, затем вычисляют дисперсию волнового процесса, высоту волны, после чего находят метацентрическую высоту путем использования математической модели и введения поправок, зависящих от длины волны моря.
Недостатком такого способа является его сложность, когда для нахождения величины метацентрической высоты необходимо измерить и вычислить большое количество других параметров, каждый из которых вносит в процесс измерения дополнительную погрешность.
Известен также способ измерения остойчивости судна (2). Согласно данному способу измеряют период бортовой качки, измеряют осадки носом и кормой судна, измеряют кажущийся период волн моря, измеряют ординаты процессов волнения и бортовой качки, затем вычисляют спектральные плотности волнения и бортовой качки, устанавливают периоды колебаний, соответствующие частотам максимумов спектральной плотности волнений и бортовой качки, определяют собственный период бортовой качки, а затем находят метацентрическую высоту, учитывая при этом размеры судна.
Недостатком такого способа является его сложность и невысокая точность определения метацентрической высоты, так как при осуществлении способа измеряют многочисленные параметры, * каждый из которых вносит дополнительную погрешность в процесс измерения. Затем используют при вычислении эмпирические формулы, коэффициенты в которых зависят, от размеров судна и его формы, что ухудшает точность измерения метацентрической высоты.
Известен способ определения параметра транспортного средства (3), взятый за прототип, согласно которому регистрируют процесс колебаний транспортного средства, затем производят спектральный анализ колебаний, определяют частоту максимальной амплитуды составляющей спектра, которая является частотой собственных колебаний транспортного средства, при этом регистрируют колебания в виде переменных ускорений в четырех точках транспортного средства, расположенных в ортогональной системе с координатами (0; 0; 0), (lx; 0; 0), (0; 1у; 0), (0; 0; lz), после чего для каждой из ортогональных осей определяют разность двух ускорений, затем производят спектральный анализ «n» реализаций разности ускорений, усредняют между собой полученные «n» спектров для нахождения частоты собственных колебаний транспортного средства, после чего производят спектральный анализ «n» реализаций ускорений, зарегистрированных в точке начала координат, и определяют усредненную амплитуду спектральной составляющей данного ускорения на частоте собственных колебаний транспортного средства, которую затем делят на усредненную амплитуду спектральной составляющей разности ускорений на частоте собственных колебаний, а результат деления умножают на величину соответствующей координаты lx,y,z, в результате чего находят значение координаты центра массы транспортного средства по данной ортогональной оси.
Недостатком данного способа является наличие трудностей в определении частоты собственных колебаний транспортного средства, находящегося в условиях сильного волнения моря и сильных переменных ветров, когда сложно найти четкий максимум в усредненном спектре разностей ускорений.
Заявленное изобретение решает задачу создания простого и точного способа нахождения центра массы транспортного средства, которое можно использовать для определения характеристик движущегося транспортного средства, в том числе для нахождения метацентрической высоты и остойчивости.
Для решения поставленной задачи способ, согласно которому регистрируют колебания в виде переменных ускорений в четырех точках транспортного средства, расположенных в ортогональной системе с координатами (0; 0; 0), (lx, 0, 0), (0, ly, 0), (0, 0, lz), после чего для каждой из ортогональных, осей определяют разность двух ускорений, затем производят спектральный анализ «n» реализаций разности ускорений, усредняют между собой полученные «n» спектров разностей ускорений, после чего, производят спектральный анализ «n» реализаций ускорения, зарегистрированных в точке начала координат, после чего полученные спектры усредняют между собой и определяют амплитуду спектральной составляющей усредненного спектра данного ускорения на частоте собственных колебаний транспортного средства, которую затем делят на усредненную амплитуду спектральной составляющей разности ускорений на частоте собственных колебаний, а результат деления умножают на величину соответствующей координаты ix, у, r, в результате чего находят значение координаты центра массы транспортного средства для данной ортогональной оси, введена последовательность действий, согласно которой в указанных точках транспортного средства регистрируют также колебания виде переменных угловых скоростей, после чего для каждой из ортогональных осей определяют разность двух угловых скоростей, затем производят спектральный анализ «n» реализаций разности угловых скоростей, усредняют между собой полученные «n» спектров разностей угловых скоростей, после чего сравнивают между собой усредненные спектры ускорений угловых скоростей, при этом за частоту собственных колебаний транспортного средства принимают частоту спектральной составляющей, имеющей более выраженный максимум при сравнении обоих спектров.
Техническим результатом заявленного изобретения является увеличение надежности определения параметров транспортного средства в сложных климатических условиях.
Сущность изобретения поясняется чертежом, где:
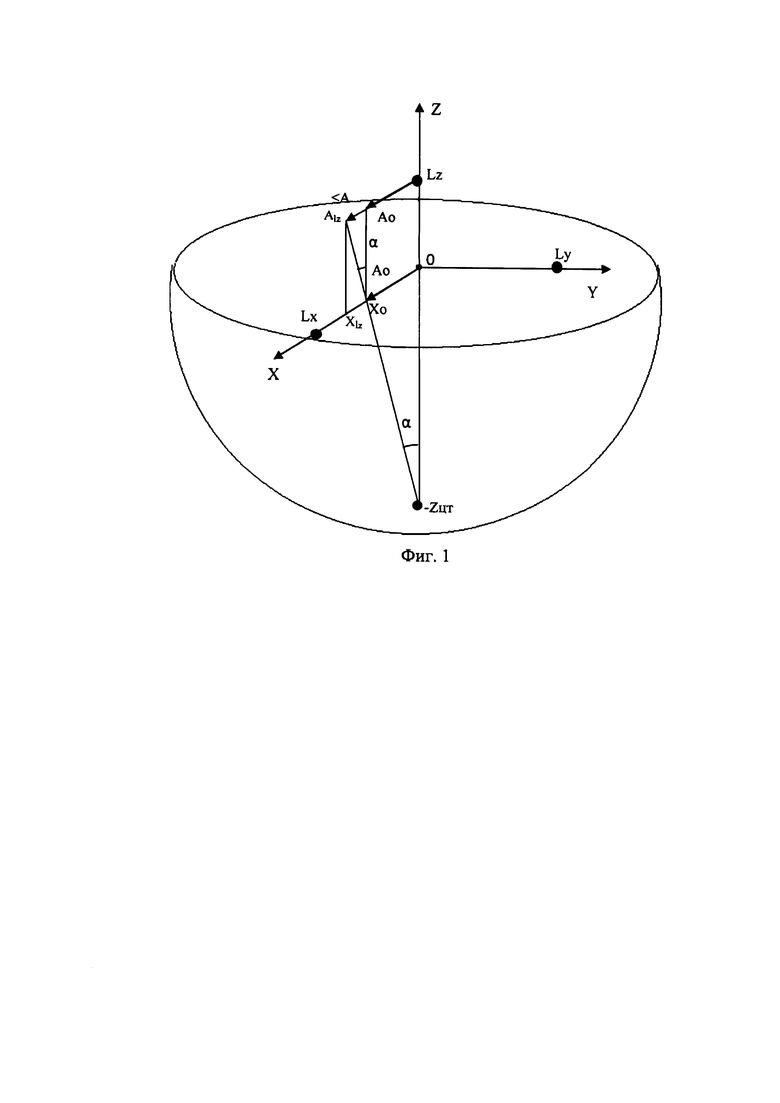
Фиг. 1 - диаграмма ускорений, измеренных для вертикальной к палубе плавающего транспортного средства оси.
Как показано на фиг. 1 ортогональные оси координат ориентируют, например, на условном судне таким образом, что ось Z расположена перпендикулярно палубе, ось Y расположена вдоль направления нос - корма, ось X расположена перпендикулярно борту. При этом для оси Z измеряют ускорения в точках с координатами (0; 0; 0) и (0; 0; lz). Причем регистрируют ускорения, направленные перпендикулярно к борту, то есть вдоль оси X, по которой наиболее выражена качка судна.
При воздействии внешних факторов на судно (волнение моря, ветер) судно колеблется вокруг центра тяжести по сложной траектории, в которой имеется составляющая колебаний с частотой собственных колебаний. Причем амплитуда этих колебаний максимальна в направлении оси X. Амплитуда ускорений в двух точках оси z на частоте собственных колебаний равны.
Ао=Хо ⋅ (2 π fc)2
Alz=Xlz ⋅ (2 π fc)2
где Хо, Xlz - амплитуды колебаний вдоль оси X,
fc - частота собственных колебаний судна.
Затем вычитают друг из друга реализации двух ускорений последовательно «n» раз. В полученных результатах остается составляющая колебаний на частоте fc, так как согласно фиг. 1 амплитуды ускорений в точке (0, 0, Z) больше амплитуды ускорений в точке (0, 0, 0). А составляющие ускорений, вызванные осадкой судна на нос или на корму, вызванные плоскопараллельными движениями судна от ветра и волны моря, практически одинаковы в обоих точках измерения и при вычитании ускорений амплитуды их стремятся к нулю.
В условиях сильного волнения и сильных переменчивых ветров, когда на собственные колебания судна накладываются колебания, вызванные периодическими влияниями волн моря и штормового ветра, трудно определить частоту собственных колебаний судна. При этом «n» реализаций разностей ускорений подвергают спектральному анализу, полученные «n» спектров усредняют между собой. В усредненном спектре разности ускорений в нормальных климатических условиях максимальная спектральная составляющая имеет частоту, равную частоте собственных колебаний судна. Однако при наличии сильного волнения и шквалистого ветра в спектре ускорений могут появляться частоты, на которых амплитуды спектральных составляющих сравнимы с спектральной составляющей на частоте собственных колебаний судна.
Для повышения надежности работы измеряют также угловые скорости в указанных точках судна. При этом производят те же операции, что и с реализациями ускорения, и получают усредненный спектр разности угловых скоростей. Из-за того, что ускорение колебаний точек судна и угловая скорость этих колебаний имеют разную физическую природу и угловая скорость зависит от частоты колебаний в первой степени, а не во второй степени, как у ускорения, то спектр угловых скоростей имеет высшие значения на низких частотах, чем спектр ускорений, и меньшие значения на высших частотах, чем спектр ускорений. Поэтому для больших судов с низшими собственными частотами в спектре угловых скоростей максимум более выражен, а частоту этого максимума принимают за частоту собственных колебаний. А для малых судов с повышенными собственными частотами их определяют в основном по спектру ускорений.
Для обеспечения одновременного измерения в необходимых точках судна ускорения и угловой скорости лучшим решением является использование современных микросхем, имеющих внутри себя ортогональную триаду акселерометров и гироскопов. Полученные реализации колебаний по ускорению и угловой скорости совпадают между собой по месту и по времени, увеличивая точность измерений.
Затем производят спектральный анализ «n» ускорений, зарегистрированных в точке (0; 0; 0). Полученные спектры усредняют между собой и в усредненном спектре определяют амплитудную составляющую на частоте собственных колебаний Ао, которую делят на величину ΔА0 и получают результат
Согласно фиг. 1 из подобия двух треугольников с одним углом а имеет место равенство:
Из полученного выражения находят координату центра массы судна по оси Z
Аналогичным образом определяют координаты центра массы по другим ортогональным координатам X и Y. Причем, если начало координат находится над точкой центра массы судна, то координаты Хцт и Yцт будут равны нулю.
Предложенный способ измерения координат центра массы транспортного, средства имеет незначительную погрешность, так как она зависит от относительной погрешности измерения расстояний Ix,y,z 10-3, и от относительной погрешности измерения ускорении, которая находится на уровне 10-4. При этом в целом относительная погрешность измерения координат центра массы реально будет составлять 10-3, что для практических целей достаточно.
Данный способ может быть применен на автомобильном транспорте, на самолетах, на подводных лодках, на морских судах. При этом обеспечивают контроль за положением центра массы транспортного средства, что очень важно для центровки жидких и сыпучих грузов при их погрузке и транспортировке. Для плавающих транспортных средств координаты центра массы позволяют определить метацентрическую высоту и остойчивость транспортного средства.
Литература
1. Заявка 5032476/11 от 17.02.1992 г., опубликована 10.04.1996 «Способ контроля остойчивости и скорости судна».
Заявители: Нечаев Ю.И. и другие.
2. Заявка 94030622/11 от 08.08.1996 г., опубликована 27.09.1997 «Способ контроля остойчивости судна».
Заявители: Нечаев Ю.И. и другие.
3. Патент на изобретение №2598973 от 08.09.2016 «Способ измерения параметра транспортного средства».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРА ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2598973C2 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2272739C1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2467914C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 1994 |
|
RU2091269C1 |
| Способ контроля остойчивости судна | 1990 |
|
SU1782863A1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА | 1991 |
|
RU2040429C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА НА МОРСКОМ ВОЛНЕНИИ С ЦЕЛЬЮ СНИЖЕНИЯ БОРТОВОЙ И КИЛЕВОЙ КАЧКИ И СИСТЕМА, РЕАЛИЗУЮЩАЯ СПОСОБ (ВАРИАНТЫ) | 2019 |
|
RU2720122C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА | 1998 |
|
RU2147540C1 |
| СПОСОБ КОНТРОЛЯ НЕПОТОПЛЯЕМОСТИ СУДНА | 1991 |
|
RU2016812C1 |
Изобретение относится к точному приборостроению, а именно к способам определения технических параметров транспортного средства. Регистрируют колебания в виде переменных ускорений в четырех точках транспортного средства, расположенных в ортогональной системе с координатами. В точках транспортного средства регистрируют колебания переменных угловых скоростей. Для каждой из ортогональных осей определяют разности двух угловых скоростей. Производят спектральный анализ «n» реализаций разностей угловых скоростей, усредняют между собой полученные «n» спектров разностей угловых скоростей, сравнивают между собой усредненные спектры ускорений и угловых скоростей. За частоту собственных колебаний транспортного средства принимают частоту спектральной составляющей, имеющей более выраженный максимум при сравнении обоих спектров. Точно находят значение координаты центра массы. Увеличивается надежность определения параметров транспортного средства в сложных климатических условиях. 1 ил.
Способ определения параметра транспортного средства, согласно которому регистрируют колебания в виде переменных ускорений в четырех точках транспортного средства, расположенных в ортогональной системе с координатами (0; 0; 0), (1х; 0; 0), (0; 1у; 0), (0; 0; lz), после чего для каждой из ортогональных осей определяют разность двух ускорений, затем производят спектральный анализ «n» реализаций разности ускорений, усредняют между собой полученные «n» спектров разностей ускорений, после чего производят спектральный анализ «n» реализаций ускорений, зарегистрированных в точке начала координат, и определяют усредненную амплитуду спектральной составляющей данного ускорения на частоте собственных колебаний транспортного средства, которую затем делят на усредненную амплитуду спектральной составляющей разности ускорений на частоте собственных колебаний, а результат деления умножают на величину соответствующей координаты lx,y,z, в результате чего находят значение координаты центра массы транспортного средства по данной ортогональной оси, отличающийся тем, что в указанных точках транспортного средства регистрируют также колебания переменных угловых скоростей, после чего для каждой из ортогональных осей определяют разности двух угловых скоростей, затем производят спектральный анализ «n» реализаций разностей угловых скоростей, усредняют между собой полученные «n» спектров разностей угловых скоростей, после чего сравнивают между собой усредненные спектры ускорений и угловых скоростей, при этом за частоту собственных колебаний транспортного средства принимают частоту спектральной составляющей, имеющей более выраженный максимум при сравнении обоих спектров.
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРА ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2598973C2 |
| СПОСОБ УМЕРЕНИЯ БОРТОВОЙ КАЧКИ СУДНА ПОСРЕДСТВОМ ПАССИВНОГО УСПОКОИТЕЛЯ БОРТОВОЙ КАЧКИ И ПАССИВНЫЙ УСПОКОИТЕЛЬ БОРТОВОЙ КАЧКИ СУДНА | 2013 |
|
RU2529244C1 |
| СПОСОБ РЕНТГЕНОДИАГНОСТИКИ РАКА ЖЕЛУДОЧНО-КИШЕЧНОГО ТРАКТА | 0 |
|
SU195040A1 |
| DE 102013211697 A1, 24.12.2014 | |||
| WO 2017119008 A1, 13.07.2017 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

