Область техники
[0001] Настоящее изобретение относится к области автоматического управления интеллектуальными машинами, в частности, к способу управления роботом для интеллектуального напыления множества моделей транспортных средств.
Уровень техники
[0002] С бурным развитием электронных технологий в 1980-х годах, различные информационные роботы начали заменять некоторых рабочих в различных отраслях промышленного производства. С развитием информационных технологий промышленная робототехника широко применяется на производственных линиях, включая сборку, сварку, склеивание и другие случаи, где роботы часто используются для выполнения операций. Например, люди предъявляют все более высокие требования к характеристикам и внешнему виду изделий механической обработки, таких как автомобили. Эффект окраски автомобиля составляет основное впечатление от внешнего вида автомобиля. Процесс нанесения покрытия на автомобиль является одним из четырех основных процессов производства автомобилей (штамповка, сварка, нанесение покрытия и окончательная сборка), и его качество напрямую влияет на первое впечатление потребителей об автомобильной марке. Из-за влияния многих факторов на качество автомобильного покрытия, таких как само покрытие, среда покрытия и установка различных параметров процесса, автомобильное покрытие превратилось в высокоточную и сложную работу.
Технические проблемы
[0003] Благодаря преимуществам точности напыления и контролируемого диапазона напыления, в процессе напыления экономится большое количество промышленных покрытий, и в то же время во время напыления образуется меньше отходов краски, что снижает ущерб окружающей среде. Таким образом, большое количество новых роботов-напылителей и связанных с ними технологий управления стало предметом исследований. Имеется большое количество патентов, таких как патентная заявка номер CN201811569171.0 на данный тип «системы напыления заготовок», однако структура аппаратной системы робота-распылителя является аналогичной, поэтому направления исследований существующего робота-распылителя в основном заключаются в области планирования траектории, управления напылением и машинного зрения.
[0004] Большинство существующих роботов-напылителей выполняют операции напыления по сформированной идеальной траектории. Чтобы обеспечить качество напыления, обрабатываемая деталь, подлежащая напылению, должна быть помещена в идеальное положение, однако при фиксации обрабатываемой детали будет возникать ошибка положения, поэтому во время напыления идеальный эффект не может быть достигнут. Метод получения модели заготовки, основанный на сканировании заготовки на месте с последующей обработкой сканированных данных на месте для получения модели заготовки в режиме реального времени, увеличит вычислительную нагрузку на оборудование, что приведет к увеличению времени напыления отдельной заготовки, а также ускорению износа робота-распылителя. Для деталей со сложными контурами, например, узлов автомобиля, требующих напылений в большом количестве и в короткие сроки, крайне необходима высокая эффективность напыления, хороший эффект напыления, небольшие потери оборудования, высокая точность напыления и возможность реализации идентификация и напыления большого количества узлов различных транспортных средств с помощью робота-опрыскивателя в короткие сроки.
Техническое решение
[0005] Чтобы решить вышеупомянутые технические проблемы, настоящее изобретение предлагает способ управления роботом для интеллектуального напыления множества моделей транспортных средств, который применяется для идентификации узлов различных моделей транспортных средств и напыления частиц.
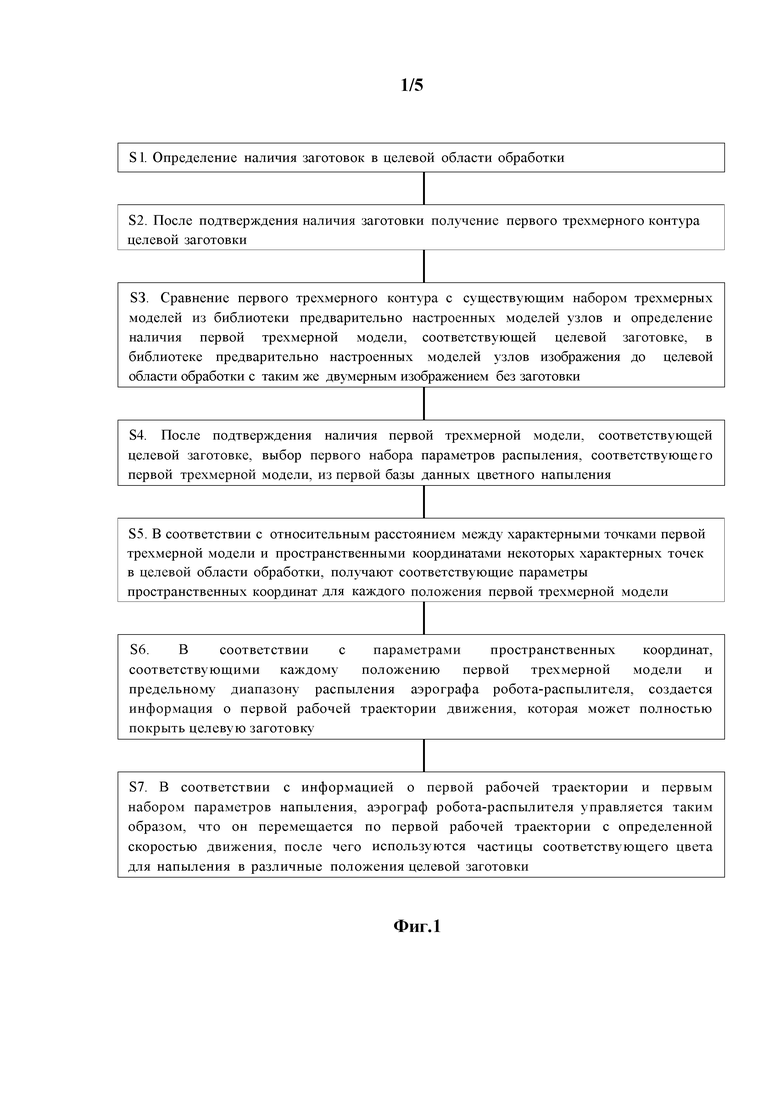
[0006] Настоящее изобретение обеспечивает способ управления, включая следующие этапы: S1. Определение наличия заготовок в целевой области обработки; S2. После подтверждения наличия заготовки получение первого трехмерного контура целевой заготовки; S3. Сравнение первого трехмерного контура с существующим набором трехмерных моделей из библиотеки предварительно настроенных моделей узлов и определение наличия первой трехмерной модели, соответствующей целевой заготовке, в библиотеке предварительно настроенных моделей узлов; S4. После подтверждения наличия первой трехмерной модели, соответствующей целевой заготовке, выбор первого набора параметров напыления, соответствующего первой трехмерной модели, из первой базы данных цветного напыления; S5. В соответствии с относительным расстоянием между характерными точками первой трехмерной модели и пространственными координатами некоторых характерных точек в целевой области обработки, получают соответствующие параметры пространственных координат для каждого положения первой трехмерной модели; S6. В соответствии с параметрами пространственных координат, соответствующими каждому положению первой трехмерной модели и предельному диапазону распыления аэрографа робота-распылителя, создается информация о первой рабочей траектории движения, которая может полностью покрыть целевую заготовку; S7. В соответствии с информацией о первой рабочей траектории и первым набором параметров распыления, аэрограф робота-распылителя управляется таким образом, что он перемещается по первой рабочей траектории с определенной скоростью движения, после чего используются частицы соответствующего цвета для напыления в различные положения целевой заготовки.
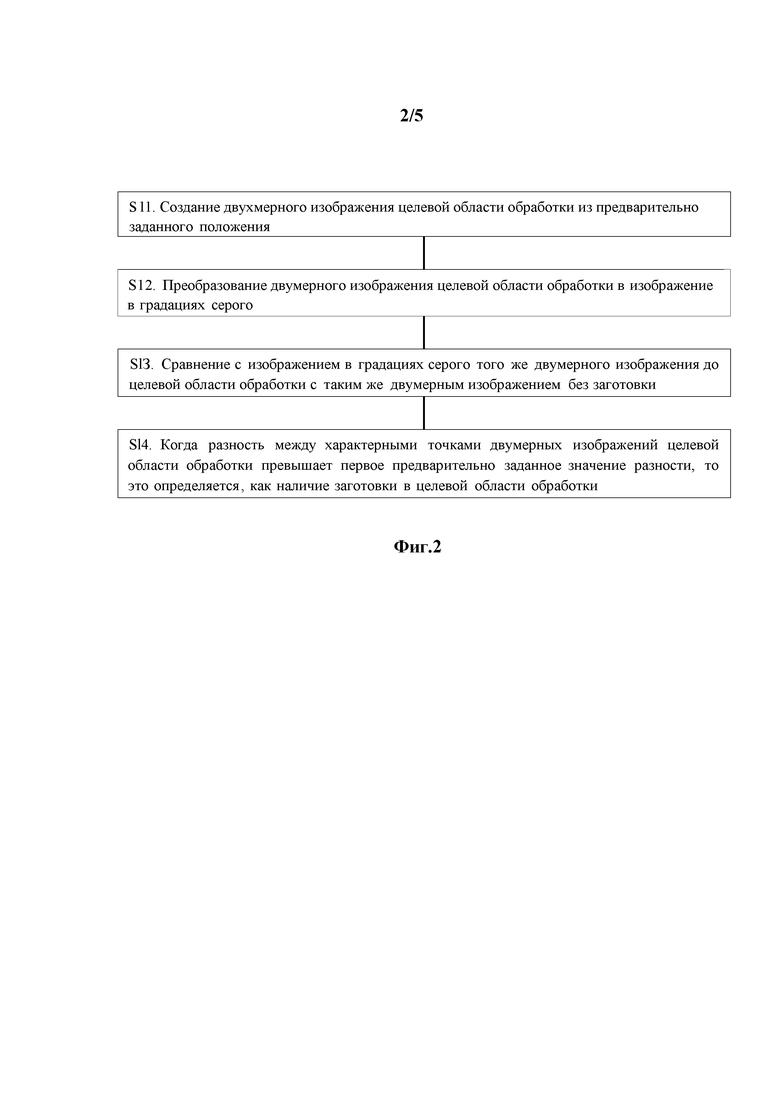
[0007] Кроме того, этап S1 «определение наличия заготовки в целевой области обработки», в частности, включает: S11. Создание двухмерного изображения целевой области обработки из предварительно заданного положения; S12. Преобразование двумерного изображения целевой области обработки в изображение в градациях серого; S13. Сравнение с изображением в градациях серого того же двумерного изображения до целевой области обработки с таким же двумерным изображением без заготовки; S14. Когда разность между характерными точками двумерных изображений целевой области обработки превышает первое предварительно заданное значение разности, то это определяется, как наличие заготовки в целевой области обработки.
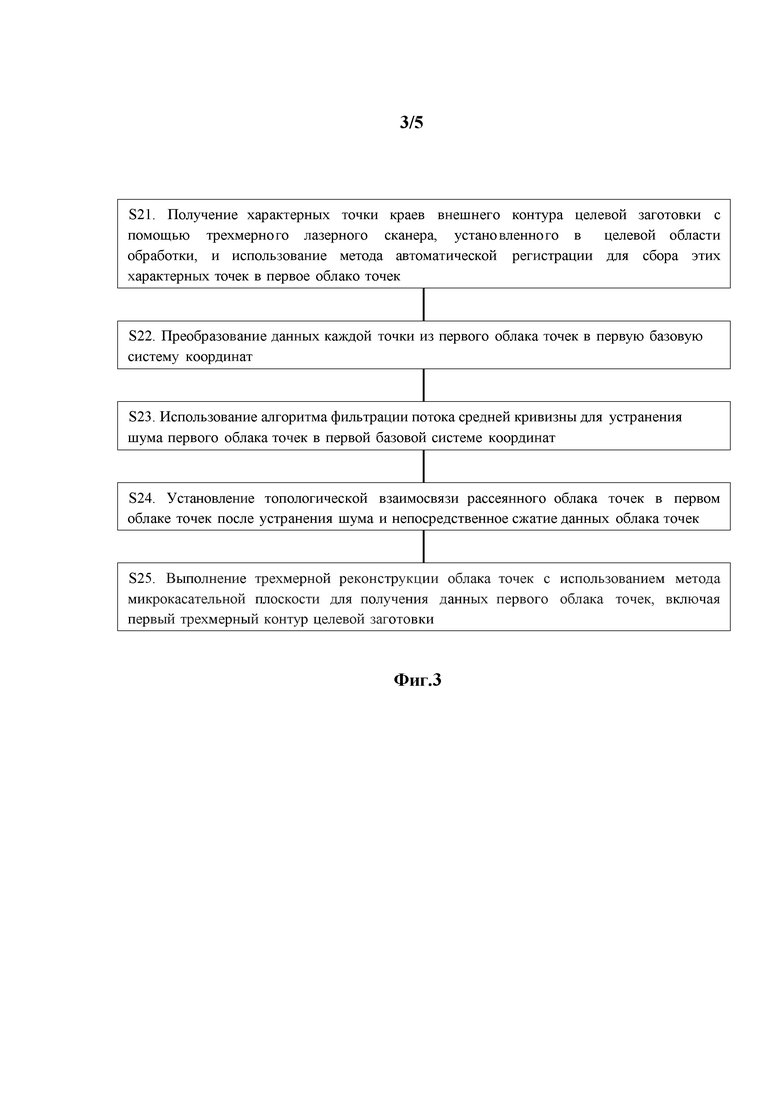
[0008] Кроме того, этапе S2 «получение первого трехмерного контура целевой детали», в частности, включает: S21. Получение характерных точки краев внешнего контура целевой заготовки с помощью трехмерного лазерного сканера, установленного в целевой области обработки, и использование метода автоматической регистрации для сбора этих характерных точек в первое облако точек; S22. Преобразование данных каждой точки из первого облака точек в первую базовую систему координат; S23. Использование алгоритма фильтрации потока средней кривизны для устранения шума первого облака точек в первой базовой системе координат; S24. Установление топологической взаимосвязи рассеянного облака точек в первом облаке точек после устранения шума и непосредственное сжатие данные облака точек; S25. Выполнение трехмерной реконструкции облака точек с использованием метода микрокасательной плоскости для получения данных первого облака точек, включая первый трехмерный контур целевой заготовки.
[0009] Кроме того, библиотека предварительно настроенных моделей узлов включает в себя данные моделей узлов множества различных моделей транспортных средств. Когда данные облака точек первого трехмерного контура на 99% идентичны предварительно настроенным данным облака точек определенной модели узла в библиотеке предварительно настроенных моделей узлов, это означает наличие первой трехмерной модели.
[0010] Кроме того, параметры напыления, соответствующие библиотеке предварительно настроенных моделей узлов, хранятся в первой базе данных цветного напыления. Предполагается, что каждая трехмерная модель в библиотеке предварительно настроенных моделей узлов соответствует нескольким наборам параметров напыления в первой базе данных цветного напыления, а различные наборы параметров напыления записывают разные схемы напыления.
[0011] Кроме того, когда соответствующий набор параметров первой трехмерной модели в первой базе данных цветного напыления не соответствует требованиям использования, параметры первого набора параметров напыления корректируются в режиме онлайн в соответствии с первой трехмерной моделью для получения второго набора параметров напыления, отвечающего требованиям напыления. В то же время вторые параметры напыления сохраняются в первой базе данных цветного напыления.
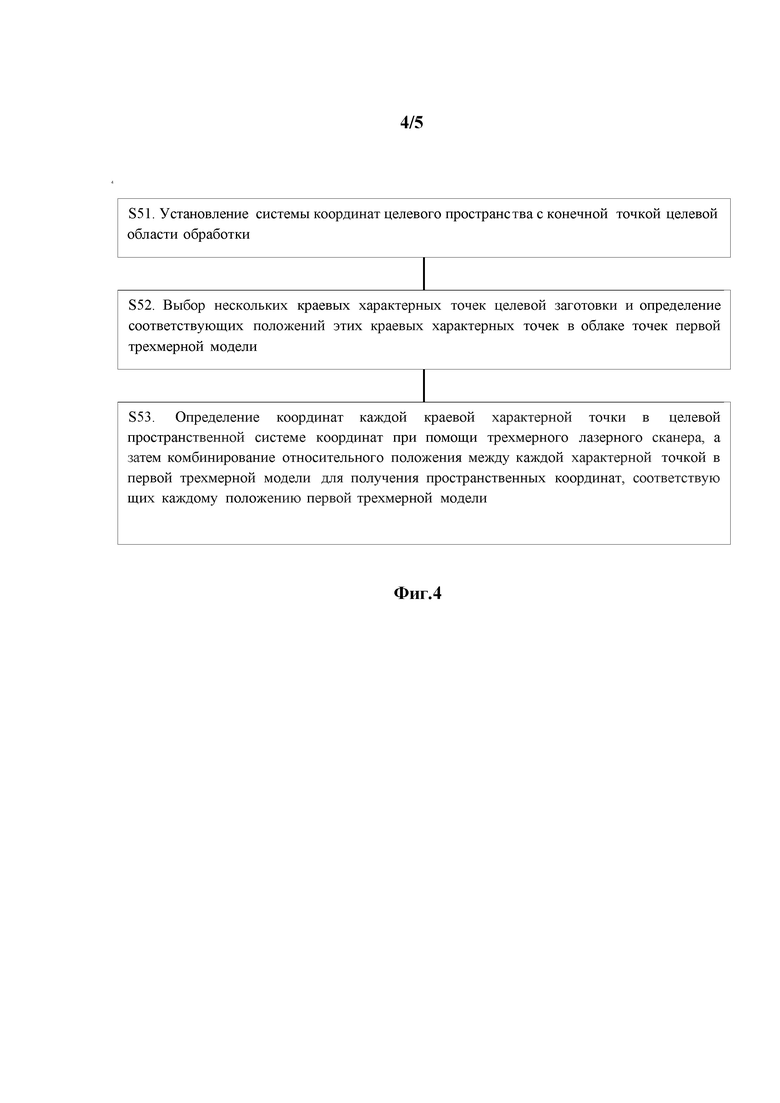
[0012] Кроме того, этап S5, в частности, включает: S51. Установление системы координат целевого пространства с конечной точкой целевой области обработки; S52. Выбор нескольких краевых характерных точек целевой заготовки и определение соответствующих положений этих краевых характерных точек в облаке точек первой трехмерной модели; S53. Определение координат каждой краевой характерной точки в целевой пространственной системе координат при помощи трехмерного лазерного сканера, а затем комбинирование относительного положения между каждой характерной точкой в первой трехмерной модели для получения пространственных координат, соответствующих каждому положению первой трехмерной модели.
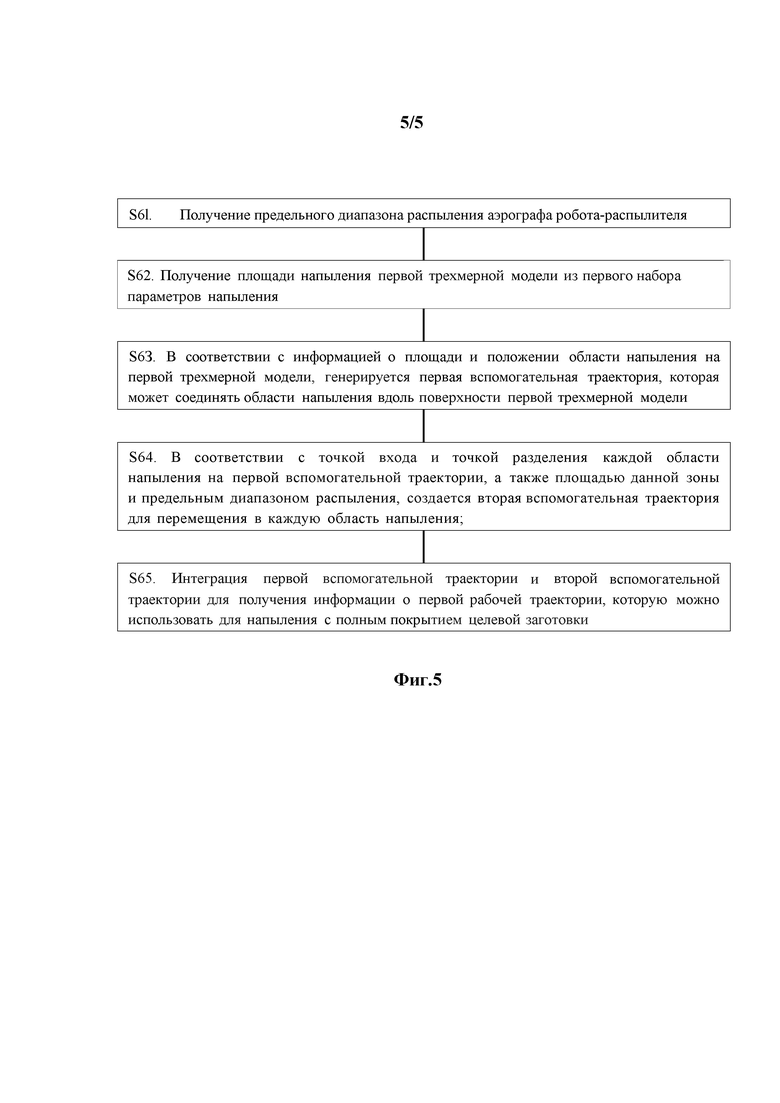
[0013] Кроме того, этап S6, в частности, включает: S61. Получение предельного диапазона распыления аэрографа робота-распылителя; S62. Получение площади напыления первой трехмерной модели из первого набора параметров напыления; S63. В соответствии с информацией о площади и положении области напыления на первой трехмерной модели, генерируется первая вспомогательная траектория, которая может соединять области напыления вдоль поверхности первой трехмерной модели; S64. В соответствии с точкой входа и точкой разделения каждой области напыления на первой вспомогательной траектории, а также площадью данной зоны и предельным диапазоном напыления, создается вторая вспомогательная траектория для перемещения в каждую область напыления; S65. Интеграция первой вспомогательной траектории и второй вспомогательной траектории для получения информации о первой рабочей траектории, которую можно использовать для напыления с полным покрытием целевой заготовки.
[0014] Кроме того, на первой вспомогательной траектории и второй вспомогательной траектории аэрограф робота-распылителя находится примерно на одинаковом расстоянии от каждой области напыления во время движения.
Положительный эффект
[0015] Настоящее изобретение позволяет получать двумерное изображение целевой области обработки в режиме реального времени из предварительно заданного положения и определяет наличие входящей детали в соответствии с изменением характерных точек в изображении значений серого двумерного изображения до и после входа заготовки. В то же время, когда получен первый трехмерный контур целевой заготовки, можно определить, является ли она заготовкой узла; настоящее изобретение сравнивает первый трехмерный контурный элемент с существующим набором трехмерных моделей из библиотеки предварительно настроенных моделей узлов, тем самым быстро получая первую трехмерную модель, соответствующую целевой заготовке. Это позволяет избежать необходимости генерировать новую трехмерную модель и увеличения вычислительной нагрузки на оборудование. Изобретение выбирает несколько краевых характерных точек целевой заготовки с помощью трехмерного лазерного сканера, а затем быстро получает пространственные координаты каждого положения целевой заготовки по этим характерными точками и первой трехмерной модели, и получает точную информацию о положении заготовки с небольшим количеством систематических вычислений, что является удобным для создания рабочих траекторий аэрографа последующего робота-распылителя и уменьшения ошибок, вызванных фиксацией заготовки для напыления в указанном положении с последующим позиционированием координат каждой точки положения заготовки в указанном положении. В соответствии с площадью напыления целевой заготовки настоящее изобретение получает первую вспомогательную траекторию, которая может соединять области напыления вдоль поверхности первой трехмерной модели, после чего в соответствии с каждой точкой входа и точки разделения, а также площадью данной зоны и предельным диапазоном распыления, создается вторая вспомогательная траектория, которая перемещается в каждую область напыления, а первая вспомогательная траектория и вторая вспомогательная траектория объединяются для создания первой рабочей траектории, уменьшая ненужные перемещения аэрографа робота-распылителя, повышая эффективность напыления и сокращая время напыления.
Перечень фигур чертежей
[0016] Фиг. 1 представляет собой блок-схему способа управления роботом для интеллектуального напыления множества моделей транспортных средств согласно настоящему изобретению; Фиг. 2 представляет собой процесс этапа S1 способа управления согласно настоящему изобретению. Фиг. 3 - блок-схема этапа S2 способа управления согласно настоящему изобретению; Фиг. 4 - блок-схема этапа S5 способа управления согласно настоящему изобретению. Фиг. 5 - блок-схема этапа S6 способа управления согласно настоящему изобретению.
Предпочтительный способ реализации изобретения
[0017] Как показано на Фиг. 1, настоящее изобретение предлагает способ управления роботом для интеллектуального напыления множества моделей транспортных средств, который применяется для идентификации узлов различных моделей транспортных средств и напыления частиц, включая следующие этапы S1-S7.
[0018] S1. Определение наличия заготовок в целевой области обработки;
[0019] Как показано на Фиг. 1 и 2, этап S1 в настоящем изобретении, в частности, включает: S11. Создание двухмерного изображения целевой области обработки из предварительно заданного положения; S12. Преобразование двумерного изображения целевой области обработки в изображение в градациях серого; S13. Сравнение с изображением в градациях серого того же двумерного изображения до целевой области обработки с таким же двумерным изображением без заготовки; S14. Когда разность между характерными точками двумерных изображений целевой области обработки превышает первое предварительно заданное значение разности, то это определяется, как наличие заготовки в целевой области обработки. Получение двухмерных изображений может быть реализовано с помощью камеры, установленной в области обработки цели, либо встроенной камеры трехмерного лазерного сканера. По сравнению с лазерным позиционированием данный метод потребляет наименьшее количество энергии.
[0020] S2. После подтверждения наличия заготовки получение первого трехмерного контура целевой заготовки.
[0021] Как показано на Фиг. 3, первый элемент трехмерного контура целевой заготовки, полученный с помощью настоящего изобретения, в частности: S21. Получение характерных точки краев внешнего контура целевой заготовки с помощью трехмерного лазерного сканера, установленного в целевой области обработки, и использование метода автоматической регистрации для сбора этих характерных точек в первое облако точек; S22. Преобразование данных каждой точки из первого облака точек в первую базовую систему координат; S23. Использование алгоритма фильтрации потока средней кривизны для устранения шума первого облака точек в первой базовой системе координат; S24. Установление топологической взаимосвязи рассеянного облака точек в первом облаке точек после устранения шума и непосредственное сжатие данные облака точек; S25. Выполнение трехмерной реконструкции облака точек с использованием метода микрокасательной плоскости для получения данных первого облака точек, включая первый трехмерный контур целевой заготовки. В настоящем изобретении регистрируются только характерные точки краев внешнего контура целевой заготовки, поэтому нет необходимости измерять все данные, если они могут соответствовать библиотеке предварительно настроенных моделей узлов, таким образом, сокращается большой объем расчетных работ с сохранением точности измерений.
[0022] Среди них библиотека предварительно установленных моделей узлов включает в себя данные моделей узлов множества различных моделей транспортных средств. Когда данные облака точек первого трехмерного контура на 99% идентичны предварительно настроенным данным облака точек определенной модели узлов в библиотеке предварительно настроенных моделей узлов, это означает наличие первой трехмерной модели.
[0023] S4. После подтверждения наличия первой трехмерной модели, соответствующей целевой заготовке, выбор первого набора параметров напыления, соответствующего первой трехмерной модели, из первой базы данных цветного напыления.
[0024] В настоящем изобретении параметры напыления, соответствующие библиотеке предварительно настроенных моделей узлов, хранятся в первой базе данных цветного напыления. Предполагается, что каждая трехмерная модель в библиотеке предварительно настроенных моделей узлов соответствует нескольким наборам параметров напыления в первой базе данных цветного напыления, а различные наборы параметров напыления записывают разные схемы напыления. Когда соответствующий набор параметров первой трехмерной модели в первой базе данных цветного напыления не соответствует требованиям использования, параметры первого набора параметров напыления корректируются в режиме онлайн в соответствии с первой трехмерной моделью для получения второго набора параметров напыления, отвечающего требованиям напыления. Среди них первый набор параметров напыления включает в себя цвет напыляемых частиц краски и параметры толщины напыления в каждой позиции первой трехмерной модели. В то же время параметры второго напыления хранятся в базе данных первого цветного напыления. Таким образом, вторичной регулировки можно избежать при последующей обработке одной и той же заготовки.
[0025] S5. В соответствии с относительным расстоянием между характерными точками первой трехмерной модели и пространственными координатами некоторых характерных точек в целевой области обработки, получают соответствующие параметры пространственных координат для каждого положения первой трехмерной модели.
[0026] Среди них, как показано на Фиг. 4. Шаг S5, в частности, включает: S51. Установление системы координат целевого пространства с конечной точкой целевой области обработки; S52. Выбор нескольких краевых характерных точек целевой заготовки и определение соответствующих положений этих краевых характерных точек в облаке точек первой трехмерной модели; S53. Определение координат каждой краевой характерной точки в целевой пространственной системе координат при помощи трехмерного лазерного сканера, а затем комбинирование относительного положения между каждой характерной точкой в первой трехмерной модели для получения пространственных координат, соответствующих каждому положению первой трехмерной модели.
[0027] S6. В соответствии с параметрами пространственных координат, соответствующими каждому положению первой трехмерной модели и предельному диапазону распыления аэрографа робота-распылителя, создается информация о первой рабочей траектории движения, которая может полностью покрыть целевую заготовку.
[0028] Как показано на Фиг. 5, этап S6 также включает следующие подэтапы. S61. Получение предельного диапазона распыления аэрографа робота-распылителя; S62. Получение площади напыления первой трехмерной модели из первого набора параметров напыления; S63. В соответствии с информацией о площади и положении области напыления на первой трехмерной модели, генерируется первая вспомогательная траектория, которая может соединять области напыления вдоль поверхности первой трехмерной модели; S64. В соответствии с точкой входа и точкой разделения каждой области напыления на первой вспомогательной траектории, а также площадью данной зоны и предельным диапазоном напыления, создается вторая вспомогательная траектория для перемещения в каждую область напыления; S65. Интеграция первой вспомогательной траектории и второй вспомогательной траектории для получения информации о первой рабочей траектории, которую можно использовать для напыления с полным покрытием целевой заготовки.
[0029] S7. В соответствии с информацией о первой рабочей траектории и первым набором параметров напыления, аэрограф робота-распылителя управляется таким образом, что он перемещается по первой рабочей траектории с определенной скоростью движения, после чего используются частицы соответствующего цвета для напыления в различные положения целевой заготовки.
[0030] На первой вспомогательной траектории и второй вспомогательной траектории аэрограф робота-распылителя находится примерно на одинаковом расстоянии от каждой зоны напыления во время движения, тем самым обеспечивая, что частицы напыляемой краски не будут иметь большого количества заливин, что повышает качество напыления.
Варианты реализации изобретения
[0031] Чтобы более четко проиллюстрировать варианты реализации настоящего изобретения и / или технического решения в предшествующем уровне техники, ниже будут приведены конкретные варианты реализации настоящего изобретения со ссылкой на прилагаемые чертежи. Очевидно, что приведенные ниже чертежи являются лишь некоторыми вариантами осуществления изобретения. Для специалистов в данной области техники без творческой работы можно получить другие чертежи и другие реализации на основе этих чертежей. Кроме того, принадлежность, относящаяся к ориентации, указывает только отношение касательно положения между компонентами, а не отношение абсолютного положения.
[0032] Как показано на Фиг. 1, настоящее изобретение предлагает способ управления роботом для интеллектуального напыления множества моделей транспортных средств, который применяется для идентификации узлов различных моделей транспортных средств и напыления частиц, включая следующие этапы S1-S7.
[0033] S1. Определение наличия заготовок в целевой области обработки;
[0034] Как показано на Фиг. 1 и 2, этап S1 в настоящем изобретении, в частности, включает: S11. Создание двухмерного изображения целевой области обработки из предварительно заданного положения; S12. Преобразование двумерного изображения целевой области обработки в изображение в градациях серого; S13. Сравнение с изображением в градациях серого того же двумерного изображения до целевой области обработки с таким же двумерным изображением без заготовки; S14. Когда разность между характерными точками двумерных изображений целевой области обработки превышает первое предварительно заданное значение разности, то это определяется, как наличие заготовки в целевой области обработки. Получение двухмерных изображений может быть реализовано с помощью камеры, установленной в области обработки цели, либо встроенной камеры трехмерного лазерного сканера. По сравнению с лазерным позиционированием данный метод потребляет наименьшее количество энергии.
[0035] S2. После подтверждения наличия заготовки получение первого трехмерного контура целевой заготовки.
[0036] Как показано на Фиг. 3, первый элемент трехмерного контура целевой заготовки, полученный с помощью настоящего изобретения, в частности: S21. Получение характерных точки краев внешнего контура целевой заготовки с помощью трехмерного лазерного сканера, установленного в целевой области обработки, и использование метода автоматической регистрации для сбора этих характерных точек в первое облако точек; S22. Преобразование данных каждой точки из первого облака точек в первую базовую систему координат; S23. Использование алгоритма фильтрации потока средней кривизны для устранения шума первого облака точек в первой базовой системе координат; S24. Установление топологической взаимосвязи рассеянного облака точек в первом облаке точек после устранения шума и непосредственное сжатие данные облака точек; S25. Выполнение трехмерной реконструкции облака точек с использованием метода микрокасательной плоскости для получения данных первого облака точек, включая первый трехмерный контур целевой заготовки. В настоящем изобретении регистрируются только характерные точки краев внешнего контура целевой заготовки, поэтому нет необходимости измерять все данные, если они могут соответствовать библиотеке предварительно настроенных моделей узлов, таким образом, сокращается большой объем расчетных работ с сохранением точности измерений.
[0037] Среди них библиотека предварительно установленных моделей узлов включает в себя данные моделей узлов нескольких различных моделей транспортных средств. Когда данные облака точек первого трехмерного контура на 99% идентичны предварительно настроенным данным облака точек определенной модели узла в библиотеке предварительно настроенных моделей узлов, это означает наличие первой трехмерной модели.
[0038]S4. После подтверждения наличия первой трехмерной модели, соответствующей целевой заготовке, выбор первого набора параметров напыления, соответствующего первой трехмерной модели, из первой базы данных цветного напыления
[0039] В настоящем изобретении параметры напыления, соответствующие библиотеке предварительно настроенных моделей узлов, хранятся в первой базе данных цветного напыления. Предполагается, что каждая трехмерная модель в библиотеке предварительно настроенных моделей узлов соответствует нескольким наборам параметров напыления в первой базе данных цветного напыления, а различные наборы параметров напыления записывают разные схемы напыления. Когда соответствующий набор параметров первой трехмерной модели в первой базе данных цветного напыления не соответствует требованиям использования, параметры первого набора параметров напыления корректируются в режиме онлайн в соответствии с первой трехмерной моделью для получения второго набора параметров напыления, отвечающего требованиям напыления. Среди них первый набор параметров напыления включает в себя цвет напыляемых частиц краски и параметры толщины напыления в каждой позиции первой трехмерной модели. В то же время параметры второго напыления хранятся в базе данных первого цветного напыления. Таким образом, вторичной регулировки можно избежать при последующей обработке одной и той же заготовки.
[0040] S5. В соответствии с относительным расстоянием между характерными точками первой трехмерной модели и пространственными координатами некоторых характерных точек в целевой области обработки, получают соответствующие параметры пространственных координат для каждого положения первой трехмерной модели;
[0041] Среди них, как показано на Фиг. 4. Шаг S5, в частности, включает: S51. Установление системы координат целевого пространства с конечной точкой целевой области обработки; S52. Выбор нескольких краевых характерных точек целевой заготовки и определение соответствующих положений этих краевых характерных точек в облаке точек первой трехмерной модели; S53. Определение координат каждой краевой характерной точки в целевой пространственной системе координат при помощи трехмерного лазерного сканера, а затем комбинирование относительного положения между каждой характерной точкой в первой трехмерной модели для получения пространственных координат, соответствующих каждому положению первой трехмерной модели.
[0042] S6. В соответствии с параметрами пространственных координат, соответствующими каждому положению первой трехмерной модели и предельному диапазону распыления аэрографа робота-распылителя, создается информация о первой рабочей траектории движения, которая может полностью покрыть целевую заготовку.
[0043] Как показано на Фиг. 5, этап S6 также включает в себя следующие подэтапы. S61. Получение предельного диапазона распыления аэрографа робота-распылителя; S62. Получение площади напыления первой трехмерной модели из первого набора параметров напыления; S63. В соответствии с информацией о площади и положении области напыления на первой трехмерной модели, генерируется первая вспомогательная траектория, которая может соединять области напыления вдоль поверхности первой трехмерной модели; S64. В соответствии с точкой входа и точкой разделения каждой области напыления на первой вспомогательной траектории, а также площадью данной зоны и предельным диапазоном распыления, создается вторая вспомогательная траектория для перемещения в каждую область напыления; S65. Интеграция первой вспомогательной траектории и второй вспомогательной траектории для получения информации о первой рабочей траектории, которую можно использовать для напыления с полным покрытием целевой заготовки.
[0044] S7. В соответствии с информацией о первой рабочей траектории и первым набором параметров напыления, аэрограф робота-распылителя управляется таким образом, что он перемещается по первой рабочей траектории с определенной скоростью движения, после чего используются частицы соответствующего цвета для напыления в различные положения целевой заготовки.
[0045] На первой вспомогательной траектории и второй вспомогательной траектории аэрограф робота-распылителя находится примерно на одинаковом расстоянии от каждой зоны напыления во время движения, тем самым обеспечивая, что частицы напыляемой краски не будут иметь большого количества заливин, что повышает качество напыления.
[0046] Вышеупомянутое содержание является дополнительным подробным описанием настоящего изобретения в сочетании с конкретными предпочтительными вариантами его реализации, и нельзя считать, что конкретная реализация настоящего изобретения ограничивается этими описаниями. Для специалистов в области техники, к которой принадлежит настоящее изобретение, можно сделать несколько простых выводов или замен без отступления от концепции изобретения, и их следует рассматривать как относящиеся к объему защиты изобретения.
Изобретение относится к способу роботизированного интеллектуального напыления множества моделей транспортных средств, включающему управление роботом, в котором осуществляют идентификацию узлов различных моделей транспортных средств и напыление частиц на поверхности узлов. Способ включает следующие этапы и действия: S1. - определяют наличие заготовок в целевой области обработки; S2. - после подтверждения наличия заготовки получают первый трехмерный контур целевой заготовки; S3. - сравнивают первый трехмерный контур с существующим набором трехмерных моделей из библиотеки предварительно настроенных моделей узлов и определяют наличие первой трехмерной модели, соответствующей целевой заготовке, в библиотеке предварительно настроенных моделей узлов; S4. - после подтверждения наличия первой трехмерной модели, соответствующей целевой заготовке, выбирают первый набор параметров напыления, соответствующий первой трехмерной модели, из первой базы данных цветного напыления; S5. - в соответствии с относительным расстоянием между характерными точками первой трехмерной модели и пространственными координатами некоторых характерных точек в целевой области обработки, получают соответствующие параметры пространственных координат для каждого положения первой трехмерной модели; S6. - в соответствии с параметрами пространственных координат, соответствующими каждому положению первой трехмерной модели и предельному диапазону распыления аэрографа робота-распылителя, создают информацию о первой рабочей траектории движения, которая может полностью покрыть целевую заготовку; S7. - в соответствии с информацией о первой рабочей траектории и первым набором параметров напыления, управляют аэрографом робота-распылителя таким образом, что перемещают аэрограф по первой рабочей траектории с определенной скоростью движения, при этом используют частицы соответствующего цвета для напыления в различные положения целевой заготовки. Технический результат: повышение эффективности способа при создании трехмерной модели и эффективности напыления большого количества узлов различных транспортных средств с помощью робота-опрыскивателя в короткие сроки. 8 з.п. ф-лы, 5 ил.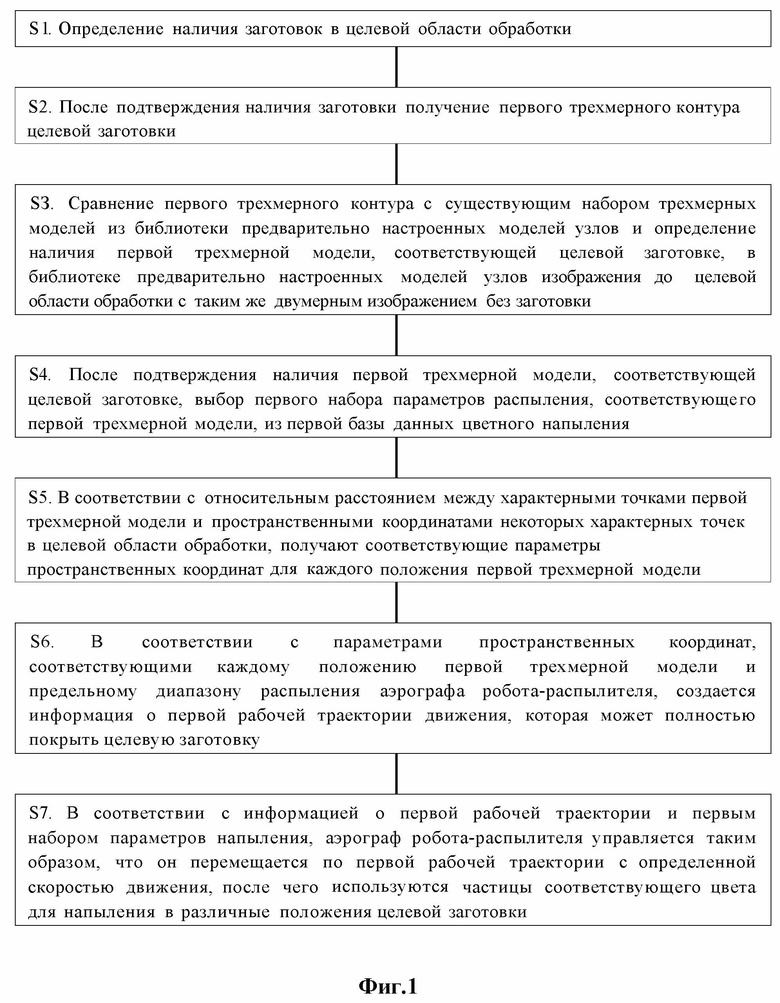
1. Способ роботизированного интеллектуального напыления множества моделей транспортных средств, включающий управление роботом, в котором осуществляют идентификацию узлов различных моделей транспортных средств и напыление частиц на поверхности узлов, включая следующие этапы и действия:
S1. - определяют наличие заготовок в целевой области обработки;
S2. - после подтверждения наличия заготовки получают первый трехмерный контур целевой заготовки;
S3. - сравнивают первый трехмерный контур с существующим набором трехмерных моделей из библиотеки предварительно настроенных моделей узлов и определяют наличие первой трехмерной модели, соответствующей целевой заготовке, в библиотеке предварительно настроенных моделей узлов;
S4. - после подтверждения наличия первой трехмерной модели, соответствующей целевой заготовке, выбирают первый набор параметров напыления, соответствующий первой трехмерной модели, из первой базы данных цветного напыления;
S5. - в соответствии с относительным расстоянием между характерными точками первой трехмерной модели и пространственными координатами некоторых характерных точек в целевой области обработки получают соответствующие параметры пространственных координат для каждого положения первой трехмерной модели;
S6. - в соответствии с параметрами пространственных координат, соответствующими каждому положению первой трехмерной модели и предельному диапазону распыления аэрографа робота-распылителя, создают информацию о первой рабочей траектории движения, которая может полностью покрыть целевую заготовку;
S7. - в соответствии с информацией о первой рабочей траектории и первым набором параметров напыления управляют аэрографом робота-распылителя таким образом, что перемещают аэрограф по первой рабочей траектории с определенной скоростью движения, при этом используют частицы соответствующего цвета для напыления в различные положения целевой заготовки.
2. Способ по п. 1, отличающийся тем, что этап S1 «определения наличия заготовки в целевой области обработки», в частности, включает следующие этапы и действия:
S11. - создают двухмерное изображение целевой области обработки из предварительно заданного положения;
S12. - преобразовывают двумерное изображение целевой области обработки в изображение в градациях серого;
S13. - сравнивают с изображением в градациях серого того же двумерного изображения до целевой области обработки с таким же двумерным изображением без заготовки;
S14. - когда разность между характерными точками двумерных изображений целевой области обработки превышает первое предварительно заданное значение разности, то это определяют как наличие заготовки в целевой области обработки.
3. Способ по п. 1, отличающийся тем, что на этапе S2 «получения первого трехмерного контура целевой детали» осуществляют, в частности, следующие действия:
S21. - получают характерные точки краев внешнего контура целевой заготовки с помощью трехмерного лазерного сканера, установленного в целевой области обработки, и используют при этом метод автоматической регистрации для сбора этих характерных точек в первое облако точек;
S22. - преобразовывают данные каждой точки из первого облака точек в первую базовую систему координат;
S23. - используют алгоритм фильтрации потока средней кривизны для устранения шума первого облака точек в первой базовой системе координат;
S24. - устанавливают топологическую взаимосвязь рассеянного облака точек в первом облаке точек после устранения шума и непосредственное сжатие данных облака точек;
S25. - выполняют трехмерную реконструкцию облака точек с использованием метода микрокасательной плоскости для получения данных первого облака точек, включая первый трехмерный контур целевой заготовки.
4. Способ по п. 1 или 3, отличающийся тем, что библиотека предварительно настроенных моделей узлов включает в себя данные моделей узлов множества различных моделей транспортных средств, причем когда данные облака точек первого трехмерного контура на 99% идентичны предварительно настроенным данным облака точек определенной модели узла колеса в библиотеке предварительно настроенных моделей узлов, определяют как наличие первой трехмерной модели.
5. Способ по п. 1, отличающийся тем, что параметры напыления, соответствующие библиотеке предварительно настроенных моделей узлов, хранят в первой базе данных цветного напыления, при этом предполагают, что каждая трехмерная модель в библиотеке предварительно настроенных моделей узлов соответствует нескольким наборам параметров напыления в первой базе данных цветного напыления, а различные наборы параметров напыления записывают разные схемы напыления.
6. Способ по п. 5, отличающийся тем, что когда соответствующий набор параметров первой трехмерной модели в первой базе данных цветного напыления не соответствует требованиям использования, параметры первого набора параметров напыления корректируют в режиме онлайн в соответствии с первой трехмерной моделью для получения второго набора параметров напыления, отвечающего требованиям напыления, при этом вторые параметры напыления сохраняют в первой базе данных цветного напыления.
7. Способ по п. 5, отличающийся тем, что этап S5, в частности, включает следующие этапы и действия:
S51. - устанавливают систему координат целевого пространства с конечной точкой целевой области обработки;
S52. - выбирают нескольких краевых характерных точек целевой заготовки и определяют соответствующие положения этих краевых характерных точек в облаке точек первой трехмерной модели;
S53. - определяют координату каждой краевой характерной точки в целевой пространственной системе координат при помощи трехмерного лазерного сканера, а затем комбинируют относительное положение между каждой характерной точкой в первой трехмерной модели для получения пространственных координат, соответствующих каждому положению первой трехмерной модели.
8. Способ по п. 1, отличающийся тем, что этап S6, в частности, включает следующие этапы и действия:
S61. - получают предельный диапазон распыления аэрографа робота-распылителя;
S62. - получают площади напыления первой трехмерной модели из первого набора параметров напыления;
S63. - в соответствии с информацией о площади и положении области напыления на первой трехмерной модели генерируют первую вспомогательную траекторию, которая может соединять области напыления вдоль поверхности первой трехмерной модели;
S64. - в соответствии с точкой входа и точкой разделения каждой области напыления на первой вспомогательной траектории, а также площадью данной зоны и предельным диапазоном напыления создают вторую вспомогательную траекторию для перемещения в каждую область напыления;
S65. - интегрируют первую вспомогательную траекторию и вторую вспомогательную траекторию для получения информации о первой рабочей траектории, которую используют для напыления с полным покрытием целевой заготовки.
9. Способ по п. 8, отличающийся тем, что на первой вспомогательной траектории и второй вспомогательной траектории аэрограф робота-распылителя устанавливают примерно на одинаковом расстоянии от каждой области напыления во время движения.
| CN 111013883 A 17.04.2020 | |||
| CN 111123853 A 08.05.2020 | |||
| РОБОТИЗИРОВАННЫЙ СТАНОК СО СТУПЕНЧАТОЙ ПОДАЧЕЙ | 2001 |
|
RU2279970C2 |
| СПОСОБ НАНЕСЕНИЯ ПОКРЫТИЯ РАСПЫЛЕНИЕМ | 2014 |
|
RU2650520C2 |
| СПОСОБ НАНЕСЕНИЯ ПОКРЫТИЯ И УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ПОКРЫТИЯ | 2013 |
|
RU2595660C1 |

