ОБЛАСТЬ ТЕХНИКИ
Заявленное техническое решение относится к области вооружения, конкретно к устройствам контроля параметров лазерных датчиков цели взрывателей снарядов и ракет.
УРОВЕНЬ ТЕХНИКИ
Основным параметром неконтактных взрывателей, к которым относятся лазерные взрыватели, является дальность срабатывания до цели, которая в зависимости от назначения боеприпаса лежит обычно в пределах 3-10 м. Известные стенды настройки и контроля лазерных датчиков цели (например, указанные в методике настройки и контроля изделия 9Э347 ТГ1.070.003ПМ, в методике настройки и контроля изделия 9-Х-1028 ТГ1.000.019ПМ) содержат аппаратуру контроля параметров, фиксирующую момент срабатывания датчика при приближении отражателя, имитирующего цель, к датчику. Обычно отражатель устанавливают на платформе с колесами, которую вручную перемещают по рельсам, уложенным по направлению излучения лазерного излучателя датчика. Платформу останавливают при загорании индикатора срабатывания, после чего с помощью дальномера замеряют расстояние до отражателя.
Недостатком известного технического решения является то, что оператору необходимо самому передвигать платформу или привлекать для этого дополнительного работника, момент срабатывания датчика цели фиксируется визуально по загоранию индикатора и остановка платформы зависит от реакции рабочего, что снижает точность определения расстояния срабатывания. Кроме того, измерение расстояния составляет самостоятельную операцию с использованием отдельного прибора. Учитывая, что лазерные датчики цели, как правило, многолучевые, контроль на существующем стенде занимает значительное время.
Целью предлагаемого технического решения является уменьшение трудоемкости операции контроля и повышение точности измерения расстояния срабатывания датчика.
Поставленная цель достигается за счет того, что на платформе устанавливается привод движения, содержащий шаговый электродвигатель, на валу которого закреплена зубчатая шестерня, входящая в зацепление с зубчатым ремнем, неподвижно закрепленным на рельсах. Стенд содержит процессорный пульт управления, который управляет работой электродвигателя, а процессор пульта управления считает текущее положение платформы.
Во время проверки платформа движется с заданного пультом расстояния к датчику цели, а при поступлении с аппаратуры контроля сигнала срабатывания датчика цели процессор фиксирует положение платформы и выводит на дисплей пульта управления расстояние срабатывания. Управление платформой и ее движением осуществляется тем же оператором, который управляет аппаратурой контроля, он же считывает с дисплея замеренное расстояние срабатывания, что позволяет снизить трудозатраты при выполнении операции. Фиксация момента срабатывания датчика цели производится процессором пульта управления, что исключает погрешность, вносимую в измерение оператором, и повышает точность измерения.
Техническим результатом изобретения является уменьшение трудоемкости операции контроля и повышение точности измерения расстояния срабатывания датчика цели.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
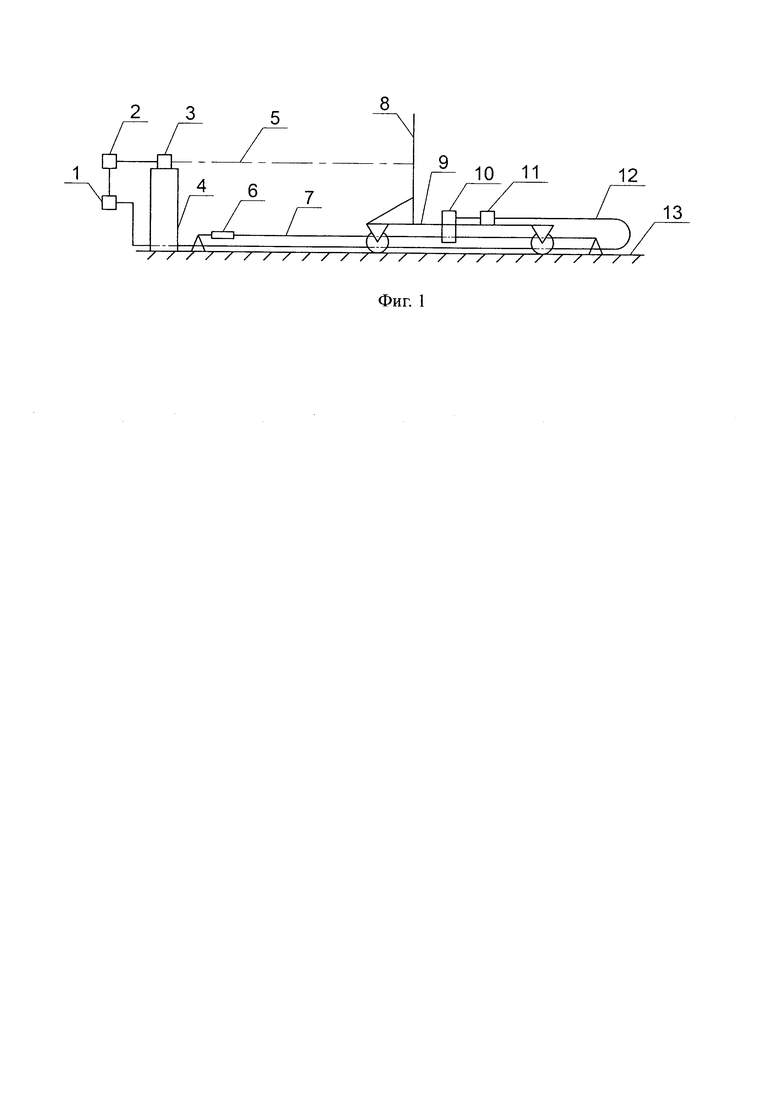
Изобретение иллюстрируется описанием и чертежом (фиг. 1).
В состав устройства входят (фиг. 1): штатная КПА 2 для проверки изделия, устройство 3 для закрепления и электрического подсоединения изделия к КПА, процессорный пульт управления 1, отражатель 8, закрепленный на колесной платформе 9, установленной на рельсовом пути 13. Для перемещения колесной платформы используется неподвижно закрепленный на рельсовом пути зубчатый ремень 7 с натяжителем 6, двигательный узел 10, в котором зубчатый ремень перекинут через зубчатую шестерню, установленную на валу шагового электродвигателя. Для управления и контроля установлен блок 11 драйвера шагового двигателя и концевых датчиков. Устройство закрепления изделия 3 установлено на рельсовом пути с помощью подставки 4 таким образом, что оптическая ось 5 установленного изделия параллельна рельсовому пути, а отражатель 8, в свою очередь, перпендикулярен оптической оси. Электрическое подключение блока драйвера и концевых датчиков 11 колесной платформы к процессорному пульту управления 1 осуществляется с помощью кабеля 12, проложенного внутри гибкого кабель-канала, уложенного вдоль рельсового пути.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Процессорный пульт управления платформой имеет вход, к которому подключается выход сигнала срабатывания изделия от КПА. Перед проверкой изделие устанавливается в приспособление и подключается кабелями к КПА.
Оператор дает команду с помощью пульта управления платформе переместиться на расстояние, большее предполагаемого расстояния срабатывания проверяемого изделия. Затем изделие включается в рабочий режим, а платформа включается в режим поиска. При этом платформа начинает движение по направлению к изделию. При срабатывании изделия КПА формирует сигнал для пульта управления, при этом процессор фиксирует текущее расстояние платформы, выводит расстояние на дисплей и возвращает платформу в начальную точку поиска. Погрешность определения расстояния срабатывания определяется, в основном, относительным удлинением ремня, так как остальные составные части погрешности, такие как время обработки сигнала срабатывания КПА, дискретность шагов двигателя, время реакции микропроцессора являются пренебрежимо малыми. При этом относительное удлинение зубчатого ремня является известной величиной.
| название | год | авторы | номер документа |
|---|---|---|---|
| Метрологический стенд по поверке, калибровке уровнемеров и сигнализаторов уровня | 2018 |
|
RU2690701C2 |
| ПУТЕВАЯ ВЫПРАВОЧНО-ПОДБИВОЧНАЯ МАШИНА | 1993 |
|
RU2111308C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ НАРУЖНОЙ ДИАГНОСТИКИ ТРУБОПРОВОДА И АВТОМАТИЗИРОВАННЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2757203C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2019 |
|
RU2737634C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2006 |
|
RU2326016C2 |
| Способ определения параметров геометрии рельсовой колеи и система для его осуществления | 2018 |
|
RU2686341C1 |
| Устройство для градуировки шкал генераторов сигналов | 1982 |
|
SU1080016A1 |
| Устройство контроля нарушения нижнего габарита в железнодорожном составе (УКНГ "Неваляшка") | 2024 |
|
RU2840916C1 |
| УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОП "ЛАСТОЧКА" | 2001 |
|
RU2231783C2 |
| Боевой ударный радиоуправляемый комплекс | 2021 |
|
RU2757095C1 |
Изобретение относится к области вооружения, конкретно к устройствам контроля параметров лазерных датчиков цели взрывателей снарядов и ракет. Дальность срабатывания является основной характеристикой лазерных датчиков цели, и для ее контроля разработаны методики и соответствующая аппаратура, сигнализирующая о срабатывании при приближении цели-имитатора во время проверки. Однако, как правило, цель (отражатель) при таких проверках передвигается оператором вручную, что влечет за собой следующие основные недостатки:
- срабатывание датчика определяется визуально, по загоранию индикатора, а значит погрешность определения расстояния практически полностью зависит от скорости реакции оператора. Для уменьшения погрешности срабатывания можно уменьшить скорость перемещения отражателя, однако это влечет уменьшение темпа проверки, особенно для многоканальных датчиков, а также может быть нежелательно для датчиков с ограниченным временем включения;
- передвижение отражателя оператором увеличивает трудоемкость, либо необходимо введение еще одного оператора;
- измерение расстояния после срабатывания это отдельная операция с использованием отдельного прибора.
Для устранения перечисленных выше недостатков предложено использование автоматически перемещающейся по рельсовому пути колесной платформы, с закрепленным на ней отражателем, при этом платформа управляется дистанционно с процессорного пульта управления. Пульт управления имеет вход для подключения выхода сигнала срабатывания от аппаратуры проверки изделия, что позволяет осуществить автоматический поиск расстояния срабатывания лазерного датчика. Таким образом, исключается человеческий фактор при определении основной характеристики лазерных датчиков цели: уменьшается погрешность определения расстояния срабатывания, исключается отдельная операция по измерению расстояния до отражателя, снижается трудоемкость, уменьшается время включения датчика. 1 ил.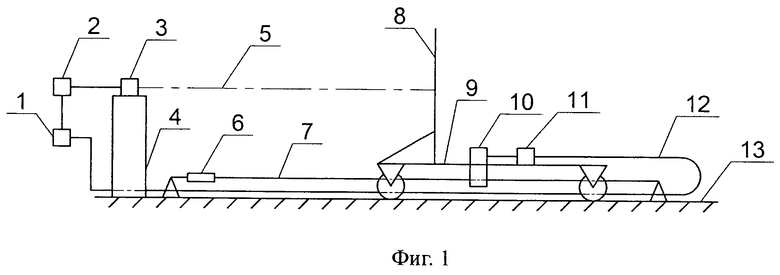
Стенд контроля лазерных датчиков цели, состоящий из аппаратуры контроля параметров датчиков, обеспечивающей индикацию сигнала срабатывания датчика, отражателя, имитирующего цель, установленного на платформе, движущейся по рельсам, отличающийся тем, что на платформе установлен привод движения, содержащий шаговый электродвигатель с установленной на его валу зубчатой шестерней, входящей в зацепление с зубчатым ремнем, неподвижно закрепленным на рельсах, при этом электродвигатель управляется процессорным пультом управления, процессор которого считает текущее положение платформы, а также фиксирует и выводит на дисплей расстояние срабатывания датчика при поступлении сигнала с аппаратуры контроля датчика цели при движении платформы к датчику с заданного расстояния.
| Стенд для испытаний датчиков цели взрывательных устройств | 2019 |
|
RU2716073C1 |
| СТЕНД ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ИЗДЕЛИЙ | 2003 |
|
RU2249808C2 |
| US 4975573 A, 04.12.1990 | |||
| CN 110095260 A, 06.08.2019. | |||

