Изобретение относится к области гидроакустики и может быть использовано при определении параметров движения объектов, обнаруженных гидролокатором.
Известны способы определения радиальной скорости целей [см., Бакулев П.А., Степин В.М. Методы и устройства селекции движущихся целей. М., Радио и связь, 1986, с. 59; Бурдик B.C. Анализ гидроакустических систем. Л., Судостроение, 1988.], включающие излучение тонального сигнала, прием и селекцию эхосигнала, узкополосную фильтрацию и определение радиальной скорости движения цели.
В указанных способах по максимальному выходному напряжению узкополосных фильтров определяется доплеровское смещение частоты отраженного сигнала относительно излученного и производится определение радиальной составляющей скорости движущегося объекта.
Как известно [см. Справочник по гидроакустике (Библиотека инженера-гидроакустика). Л., Судостроение, 1982], зависимость доплеровской частоты fД эхосигнала от скорости объекта при излучении тонального сигнала частотой fИЗЛ определяется формулой:

где V - абсолютное значение скорости объекта относительно приемо-излучающей антенны гидролокатора, с - скорость звука в воде. Знак (+) используется когда объект приближается к гидролокатору и частота эхосигнала увеличивается, а знак (-), соответственно, когда объект удаляется и частота уменьшается. Если использовать значение относительной скорости со знаком, то радиальная относительная скорость объекта, обусловленная эффектом Доплера, может быть определена по формуле:

Как следует из (2) разрешающая способность по радиальной скорости при заданной ƒИЗЛ определяется дискретностью определения ƒД, т.е. полосой используемых доплеровских фильтров. Квазиоптимальная обработка тонального сигнала предполагает [см. Рыжиков А.В., Барсуков Ю.В. Системы и средства обработки сигналов в гидроакустике: Учеб. пособие. СПб., изд-во СПбГЭТУ «ЛЭТИ», 2007] выбор полосы узкополосного фильтра равной ΔF≈1/TC, где ТС - длительность сигнала излучения.
Формула (2) может быть записана в виде:

где n - номер доплеровского канала, n=nмин…nо…nмакс, nмин и nмакс определяют доплеровский диапазон частот или диапазон доплеровских скоростей объектов, nо - «нулевой» доплеровский канал, т.е. канал, при котором радиальная доплеровская скорость равна нулю. Значение nо может быть определено по формуле nо=int[(ƒИЗЛ-ƒ)/ΔF], где ΔF - полоса фильтра, int[*] - округление до целого в большую сторону. Тогда для i-го доплеровского канала и квазиоптимальной обработки, т.е. когда ΔF≈1/TC, формула (3) принимает вид:

Как видно из формулы (4), разрешающая способность по радиальной скорости с использованием эффекта Доплера тем выше, чем больше частота излучения и больше длительность излучаемого тонального сигнала. Однако в гидроакустике, особенно при использовании низких частот, например, когда fИЗЛ≈1 кГц, при обнаружении объектов в ближней зоне длительность сигнала излучения ограничена наличием так называемой «зоны тени», обусловленной собственно излучением и влиянием реверберационных ограничений.
Формулу (4) можно представить в виде:

где Δν1 - разрешение по радиальной скорости, соответствующее дискретности доплеровской частоты.
Например, при ƒИЗЛ=1500 Гц, Тс=0.2 с и с=1500 м/с разрешение по радиальной скорости Δv1=2.5 м/с или около 5 узлов. Такое разрешение в ряде случаев не позволит отличать подвижные и неподвижные объекты. Увеличение количества фильтров также не позволит повысить разрешающую способность указанных способов определения радиальной скорости, т.к. крутизна спада аналоговых фильтров, как правило, составляет 6 дБ на октаву, что не позволяет однозначно определить доплеровскую частоту эхосигнала.
Недостатком указанных способов является низкая разрешающая способность определения радиальной скорости для низкочастотной гидролокации при ограничениях на длительность излучаемых сигналов при обнаружении объектов на малых дистанциях.
По количеству общих признаков наиболее близким к предлагаемому способу и выбранным в качестве прототипа является способ определения радиальной скорости объекта [Рыжиков А.В., Барсуков Ю.В. Системы и средства обработки сигналов в гидроакустике: Учеб. пособие. СПб., изд-во СПбГЭТУ «ЛЭТИ», 2007, с. 103].
Способ-прототип включает излучение тонального сигнала, прием и селекцию эхосигнала, вычисление спектра эхосигнала на основе преобразования Фурье, выделение огибающей спектра эхосигнала (детектирование) и определение радиальной скорости по максимальному значению частоты эхосигнала.
Устройство, реализующее указанный способ в гидролокаторе, содержит последовательно соединенные приемо-излучающий тракт с селекцией эхосигнала в пространственной и временной области, буферное запоминающее устройство (БЗУ), где накапливаются N отсчетов эхосигнала, блок дискретного преобразования Фурье (ДПФ) или быстрого преобразования Фурье (БПФ), блок выделения огибающей спектра эхосигнала (линейный или квадратичный детектор), блок определения относительной радиальной скорости объекта.
Значение радиальной скорости объекта определяется по максимальной амплитуде доплеровской частоты спектра эхосигнала в соответствии с формулой (5), при этом дискретность приращения радиальной скорости, соответствующая дискретности приращения доплеровской частоты, определяется по формуле
Δv1=ΔFДПФ/Δƒ1,
где Δƒ1=2*ƒИЗЛ/с - приращение доплеровской частоты (в Гц), соответствующее приращению радиальной скорости на 1 м/с (размерность Δƒ1 есть Гц/(м/с)).
ΔFДПФ=Fd/NДПФ - полоса ДПФ,
Fd - частота дискретизации,
NДПФ - размерность (количество отсчетов) ДПФ.
В способе-прототипе размерность ДПФ (NДПФ) равна количеству отсчетов излучаемого (опорного) сигнала N=Tсигн⋅Fd.
Таким образом, недостатком способа определения радиальной скорости объекта [Рыжиков А.В., Барсуков Ю.В. Системы и средства обработки сигналов в гидроакустике: Учеб. пособие. СПб., изд-во СПбГЭТУ «ЛЭТИ», 2007] (способа-прототипа) является низкая разрешающая способность по радиальной скорости при обнаружении малоподвижных объектов в ближней зоне акустической освещенности, т.к. точность данного способа непосредственно зависит от дискретности ΔFДПФ. В случае ограничения на максимальную длительность излучаемого сигнала обеспечить необходимую точность определения радиальной скорости способом-прототипом невозможно.
Задачей изобретения является снижение погрешности определения радиальной скорости объектов для низкочастотной гидролокации при ограничениях длительности излучаемых сигналов при обнаружении объектов на малых дистанциях.
Технический результат от использования предлагаемого технического решения заключается в снижении погрешности определения радиальной скорости объектов для низкочастотной гидролокации при ограничениях длительности излучаемых сигналов.
Указанный технический результат достигается тем, что в способ определения радиальной скорости объекта, включающий излучение тонального сигнала, прием и селекцию эхосигнала, аналого-цифровое преобразование и накопление N отсчетов на длительности сигнала, вычисление спектра эхосигнала на основе дискретного преобразования Фурье (ДПФ), выделение огибающей спектра эхосигнала и определение максимального значения амплитуды доплеровской частоты, определение относительной радиальной скорости объекта с использованием значения доплеровской частоты эхосигнала, отличающийся тем, что при вычислении спектра эхосигнала устанавливают размерность преобразования Фурье NДПФ в виде NДПФ=К⋅N, где К=2, 4, запоминают значения К/2 амплитуд и номеров частотных составляющих, соседних с каждой стороны от номера частоты с максимальным значением амплитуды, определяют уточненное значение доплеровской частоты путем интерполяции, а значение радиальной скорости определяют с учетом интерполированного значения доплеровской частоты эхосигнала.
Увеличение размерности ДПФ и применение интерполяции доплеровской частоты внутри дискретного интервала позволяет получить более высокую разрешающую способность по частоте и уменьшить погрешность определения радиальной скорости объектов.
Сущность изобретения поясняется фиг. 1-3.
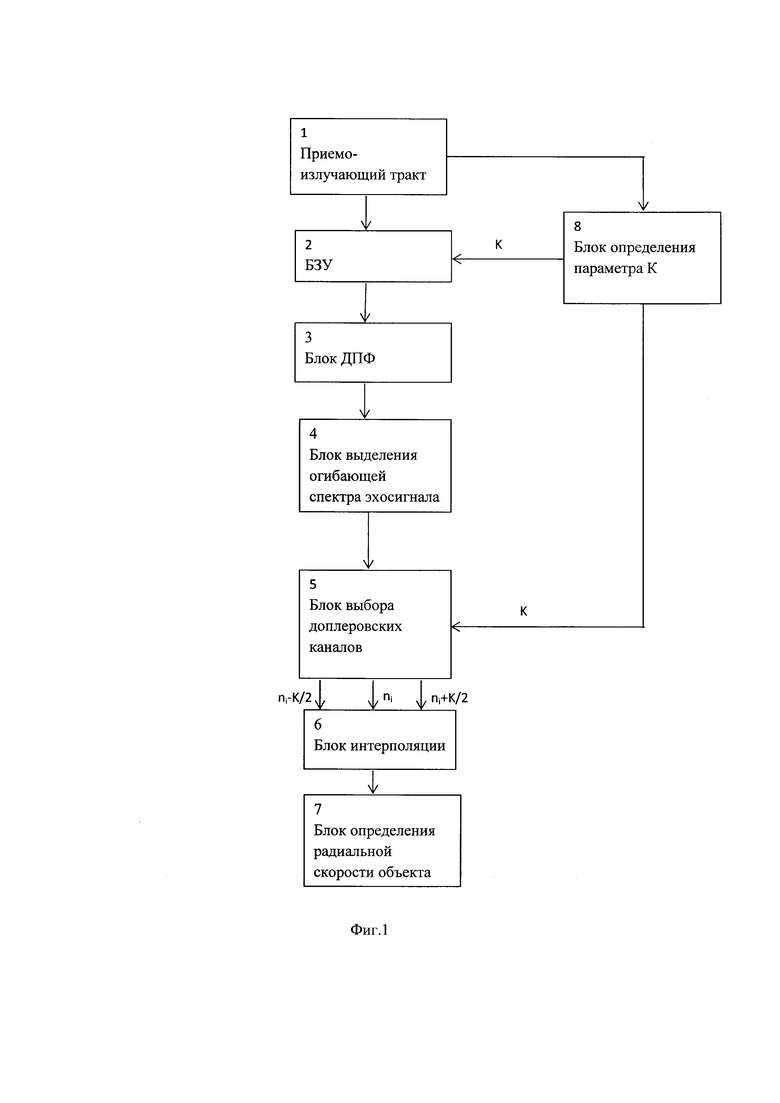
На фиг. 1 приведена блок-схема устройства, реализующего предлагаемый способ.
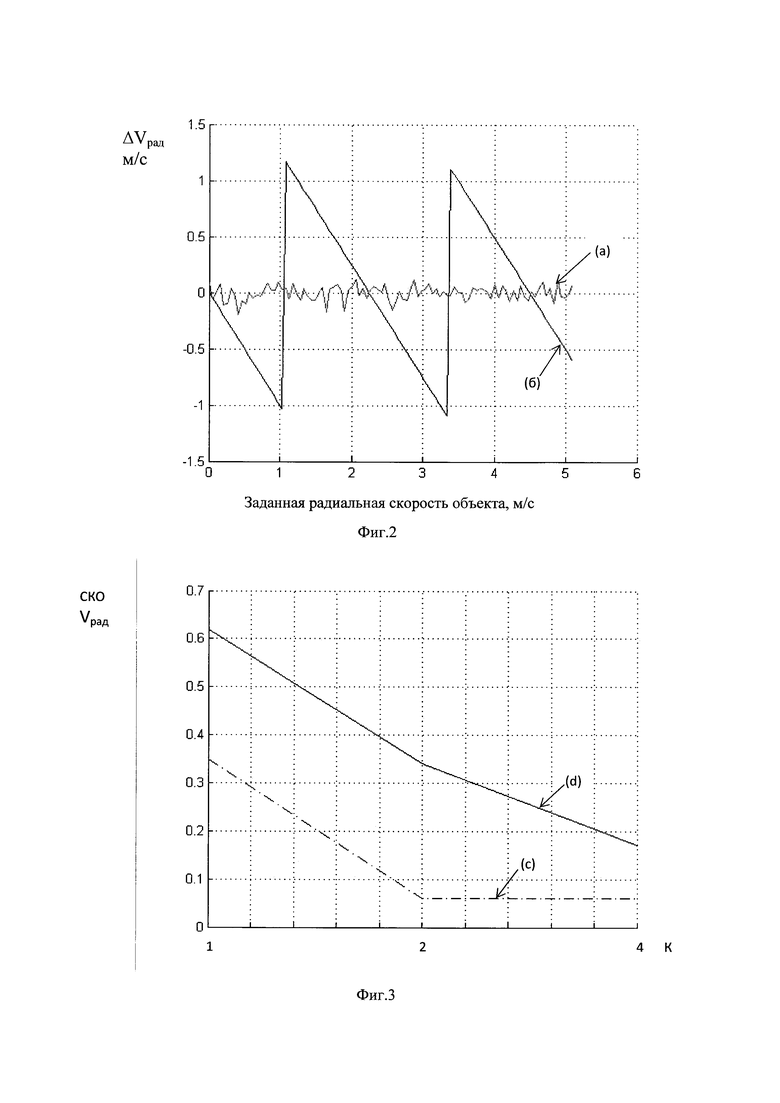
На фиг. 2 представлены результаты моделирования и сравнительной оценки погрешностей определения радиальной скорости объекта предлагаемого способа и способа-прототипа, где обозначены графики: (а) - абсолютная погрешность расчетного значения радиальной скорости ΔVрад по предлагаемому способу, (б) - абсолютная погрешность расчетного значения радиальной скорости по способу-прототипу.
На фиг. 3 представлены результаты моделирования и сравнительной оценки зависимости среднеквадратической ошибки (СКО) абсолютного отклонения радиальной скорости объекта от заданной предлагаемого способа и способа-прототипа с различными значениями К, где обозначены: (с) - СКО по предлагаемому способу, (d) - по способу-прототипу.
Устройство (фиг. 1) содержит последовательно соединенные приемо-излучающий тракт 1, буферное запоминающее устройство (БЗУ) 2, блок 3 дискретного преобразования Фурье (ДПФ) размерности NДПФ=К⋅N, блок 4 выделения огибающей спектра эхосигнала, блок 5 выбора доплеровских каналов (ДК) с максимальным откликом и соседних с ним доплеровских каналов, блок 6 интерполяции, блок 7 определения радиальной скорости объекта, также содержит блок 8 выбора значения К, причем второй выход блока 1 соединен со входом блока 8, первый выход блока 8 соединен со вторым входом блока 2, а второй выход блока 8 соединен со вторым входом блока 5.
Практическое исполнение устройств, входящих в изобретение, известно из практики гидроакустики и реализуется на основе применения цифровых устройств [см., например, Рыжиков А.В., Барсуков Ю.В. Системы и средства обработки сигналов в гидроакустике: Учеб. пособие. СПб., изд-во СПбГЭТУ «ЛЭТИ», 2007].
Реализацию способа можно продемонстрировать на примере работы устройства.
В приемо-излучающем тракте 1 производится излучение тонального сигнала с частотой излучения ƒИЗЛ и длительностью Тсигн, далее производится селекция временной реализации по пеленгу и дистанции, содержащей эхосигнал от объекта.
Временная реализация эхосигнала преобразуется в блоке 2 буферного запоминающего устройства с частотой дискретизации Fd в выборку из N отсчетов, где N={Fd⋅Тс}, {*} - операция округления до ближайшего целого, кратного 2n. Таким образом условие квазиоптимального приема сохраняется, т.е. когда ΔF≈1/Tсигн.
В блоке 8, исходя из параметров излучаемого сигнала, определяется величина К, как частное от деления расчетной дискретности приращения радиальной скорости объекта (см. формулу 5) и некоторой заданной величины Δv1зад с округлением до ближайшего четного целого числа. Предположим Δv1зад=1 м/с, тогда для вышеприведенного примера при Δv1=2.5 значение К=2.5/1 следует выбрать равным 2.
Полученная выборка из N отсчетов дополняется справа (К-1)⋅N нулевыми отсчетами и в блоке 3 подвергается преобразованию Фурье размерности (К⋅N).
Далее в блоке 4 выделения огибающей спектра эхосигнала производится вычисление модулей первых K⋅N/2 отсчетов спектра. Полученные модули спектральных отсчетов передаются в блок 5.
В блоке 5 производится выбор i-го доплеровского канала ni с максимальным уровнем амплитуды частотной составляющей Амакс, а также К/2 каналов, соседних с ним с каждой стороны. Амплитуды и номера выбранных доплеровских каналов поступают в блок 6 интерполяции.
В блоке 6 производится интерполяция значения доплеровского канала по известным алгоритмам линейной или квадратичной интерполяции и определяется nint [см. например, Фильчаков П.Ф. Справочник по высшей математике. Киев, Наукова думка, 1973., с. 333; И.Н. Бронштейн и К.А. Семендяев. Справочник по математике. М., 1962, с. 571].
В блоке 7 производится расчет интерполированного значения радиальной скорости объекта по расчетному значению приращения Δv1 радиальной скорости на доплеровский канал (5) и интерполированному значению доплеровского канала nint по формуле:

где 
Значение nint в формуле (6) соответствует интерполированному значению доплеровской частоты эхосигнала.
Результаты моделирования работы устройства, реализующего предлагаемый способ, приведены на фиг. 2. Для моделирования выбраны значения ƒИЗЛ=1500 Гц, Тс=0.2 с, Fd=5000 Гц, N=1024, с=1500 м/с. При моделировании относительная радиальная скорость V плавно изменялась в пределах 0-5 м/с. Отношение сигнал/помеха задавалось на уровне порогового.
Как видно из графиков фиг. 2, отклонение интерполированного значения радиальной скорости объекта от заданного существенно меньше, чем отклонение в способе-прототипе. Особенно заметно такое отклонение при плавном изменении скорости и малых отношениях сигнал/помеха, когда возможен «дребезг» в оценке максимальной амплитуды доплеровской частоты эхосигнала.
По результатам моделирования были выполнены сравнительные оценки погрешности определения радиальной скорости по предлагаемому способу (7) и способу-прототипу (5). Приведенные расчеты (см. фиг. 3) показывают, что погрешность оценки радиальной скорости объектов в среднем в 2-3 раза меньше, чем в способе-прототипе.
В общем случае погрешность определения радиальной скорости будет определяться погрешностью метода интерполяции и конечно погрешностью определения скорости звука в воде.
Таким образом, использование предлагаемого технического решения обеспечивает снижение погрешности определения радиальной скорости объектов для низкочастотной гидролокации при ограничениях на длительность излучаемых сигналов, что подтверждает достижение технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕЛЯЦИОННОЙ ОБРАБОТКИ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ БЫСТРОДВИЖУЩИХСЯ ЦЕЛЕЙ | 2005 |
|
RU2293997C1 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩЕЙСЯ ЦЕЛИ | 2004 |
|
RU2293359C2 |
| Способ определения параметров цели гидролокатором | 2017 |
|
RU2650835C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ В ГИДРОЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2357269C2 |
| Способ обработки псевдошумового сигнала в гидролокации | 2020 |
|
RU2739478C1 |
| ЦИФРОВОЙ ФИЛЬТР | 1997 |
|
RU2123758C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи | 2019 |
|
RU2736097C1 |
| Гидролокационный способ обнаружения объекта и измерения его параметров | 2018 |
|
RU2697937C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИСТАНЦИИ ГИДРОЛОКАТОРОМ | 2015 |
|
RU2612201C1 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ СИГНАЛОВ ПРИ НАЛИЧИИ ПЕРЕМЕННОГО ДОПЛЕРОВСКОГО ЭФФЕКТА | 2009 |
|
RU2467350C2 |
Изобретение относится к области гидроакустики и может быть использовано при определении параметров движения объектов, обнаруженных гидролокатором. Сущность изобретения заключается в том, что способ определения радиальной скорости объекта, включающий излучение тонального сигнала, прием и селекцию эхосигнала, аналого-цифровое преобразование и накопление N отсчетов на длительности сигнала, вычисление спектра эхосигнала на основе дискретного преобразования Фурье (ДПФ), дополнительно содержит этапы, на которых при вычислении спектра эхосигнала устанавливают размерность преобразования Фурье NДПФ в виде NДПФ=К⋅N, где К=2, 4, запоминают значения К/2 амплитуд и номеров частотных составляющих, соседних с каждой стороны от номера частоты с максимальным значением амплитуды, определяют уточненное значение доплеровской частоты путем интерполяции, а значение радиальной скорости определяют с учетом интерполированного значения доплеровской частоты эхосигнала. Технический результат – снижение погрешности определения радиальной скорости объектов для низкочастотной гидролокации при ограничениях на длительность излучаемых сигналов при обнаружении объектов на малых дистанциях. 3 ил.
Способ определения радиальной скорости объекта, включающий излучение тонального сигнала, прием и селекцию эхосигнала, аналого-цифровое преобразование и накопление N отсчетов на длительности сигнала, вычисление спектра эхосигнала на основе дискретного преобразования Фурье (ДПФ), выделение огибающей спектра эхосигнала и определение максимального значения амплитуды доплеровской частоты, определение относительной радиальной скорости объекта с использованием значения доплеровской частоты эхосигнала, отличающийся тем, что при вычислении спектра эхосигнала устанавливают размерность преобразования Фурье NДПФ в виде NДПФ=К⋅N, где К=2, 4, запоминают значения К/2 амплитуд и номеров частотных составляющих, соседних с каждой стороны от номера частоты с максимальным значением амплитуды, определяют уточненное значение доплеровской частоты путем интерполяции, а значение радиальной скорости определяют с учетом интерполированного значения доплеровской частоты эхосигнала.
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ОБЪЕКТА ПО ЕГО ШУМОИЗЛУЧЕНИЮ | 2015 |
|
RU2593622C1 |
| Способ определения параметров цели гидролокатором | 2017 |
|
RU2650835C1 |
| СПОСОБ И УСТРОЙСТВО БЫСТРОГО ВЫЧИСЛЕНИЯ ФУНКЦИИ НЕОПРЕДЕЛЕННОСТИ СИГНАЛА С УЧЕТОМ РЕВЕРБЕРАЦИОННОЙ ПОМЕХИ | 2009 |
|
RU2487367C2 |
| US 4680739 A, 14.07.1987. | |||

