Область техники, к которой относится изобретение
Заявляемое изобретение относится к области систем управления беспилотными летательными аппаратами (БПЛА) и предназначено для обеспечения заряда аккумуляторных батарей (АКБ) БПЛА мультикоптерного типа.
Уровень техники
В настоящее время БПЛА работают, в основном, от электрических аккумуляторов. Недостатком таких летательных аппаратов является небольшое время полета. Однако существуют задачи, когда необходимо длительное использование БПЛА в воздухе со значительным удалением от оператора. В мирное время такой задачей может быть обследование протяженных воздушных линий электропередач с целью выявления недостатков обслуживающими организациями. В военное время и в угрожаемый период существует задача по ведению разведки территории противника с использованием БПЛА. Для выполнения таких длительных задач необходима периодическая посадка аппарата и подзарядка аккумуляторов, которая может выполняться от воздушных линий электропередач переменного тока, с помощью устройства, обеспечивающего отсутствие непосредственного электрического контакта с токоведущими частями.
Известно изобретение (Патент на изобретение US 7318564, опубл. 15.01.2008) выбранное в качестве прототипа. В данном изобретении предполагается использовать кольцевой магнитопровод, расположенный сверху БПЛА самолетного типа, для зацепления с проводом воздушной линии электропередачи переменного тока с целью последующего отбора электрической энергии для заряда АКБ. При этом в описании изобретения рассматриваются два типа самолетов: одномоторный и с двумя дополнительными канальными пропеллерами для обеспечения лучшей маневренности. В обеих конструкциях существует сложность в точном позиционировании самолета при подлете к неподвижному проводу воздушной линии электропередачи. Велика вероятность промаха из-за высокой горизонтальной скорости БПЛА. Наличие двух дополнительных канальных пропеллеров позволяет лишь частично снизить горизонтальную скорость аппарата при подлете к проводу, что облегчает прицеливание, но не позволяет осуществить его с высокой степенью точности. Это является недостатком данного изобретения.
Существует также сложность с набором минимальной скорости планера обеспечивающей устойчивый полет и необходимую подъемную силу крыла после выхода из зацепления с неподвижным проводом воздушной линии электропередачи, т.е. аппарату необходимо в максимально короткий срок успеть развить скорость от ноля до скорости, превышающей скорость сваливания планера. На земле набор этой скорости осуществляется постепенно по мере разгона по взлетной поверхности или с помощью катапульты. Также усложняет задачу старта с неподвижного провода необходимость отсутствия вращения двигателей планера в момент отсоединения от провода. Иначе это вызовет вращение аппарата вокруг оси провода, т.е. имеется недостаток в осуществлении устойчивого полета БПЛА после отсоединения его от провода воздушной линии электропередачи.
Раскрытие изобретения
Задача изобретения - создание такой конструкции БПЛА с кольцевым магнитопроводом, которая обеспечивала бы надежное прицеливание, удержание и отстыковку от провода воздушной линии аппарата с последующим устойчивым полетом, после осуществления таким образом подзарядки АКБ от провода воздушной линии электропередачи.
Техническим результатом настоящего изобретения является повышение точности прицеливания БПЛА при охвате разомкнутым магнитопроводом неподвижного провода воздушной линии электропередачи для осуществления заряда аккумуляторных батарей, а также обеспечение устойчивого полета при выполнении отстыковки БПЛА от провода воздушной линии электропередачи. Дополнительным техническим результатом является возможность использования магнитопровода, выполненного в форме клещей, для удержания полезного груза и сброса его в необходимой точке.
Указанный технический результат достигается тем, что на БПЛА коптерного типа размыкаемый кольцевой магнитопровод располагается в нижней части аппарата на вертикальной оси симметрии. При этом размыкание магнитопровода осуществляется в нижней точке на вертикальной оси симметрии аппарата, путем разведения двух симметричных полуколец магнитопровода, т.е. магнитопровод представляет собой токовые клещи, расположенные в нижней части аппарата.
Краткое описание чертежей
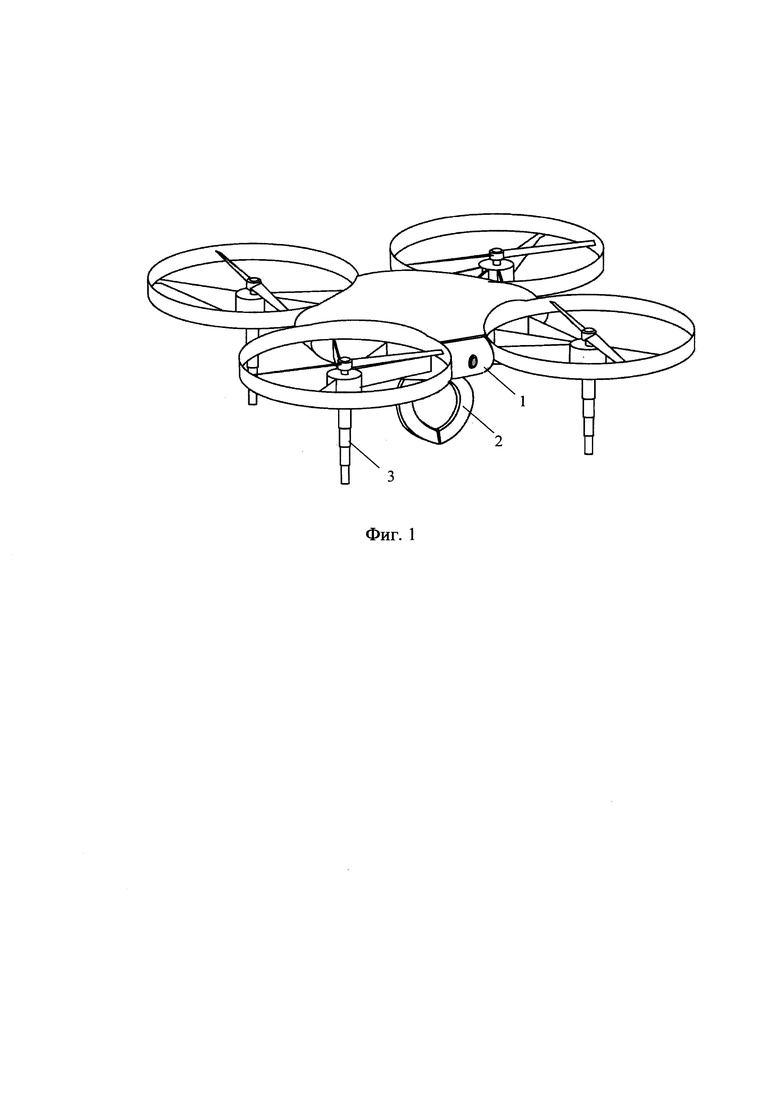
На фиг. 1 изображен БПЛА мультикоптерного типа (квадрокоптер) в наземном положении, где:
1 - поворотная видеокамера; 2 - кольцевой магнитопровод (токовые клещи); 3 - телескопические ножки, выдвигающиеся в момент посадки на ровную поверхность.
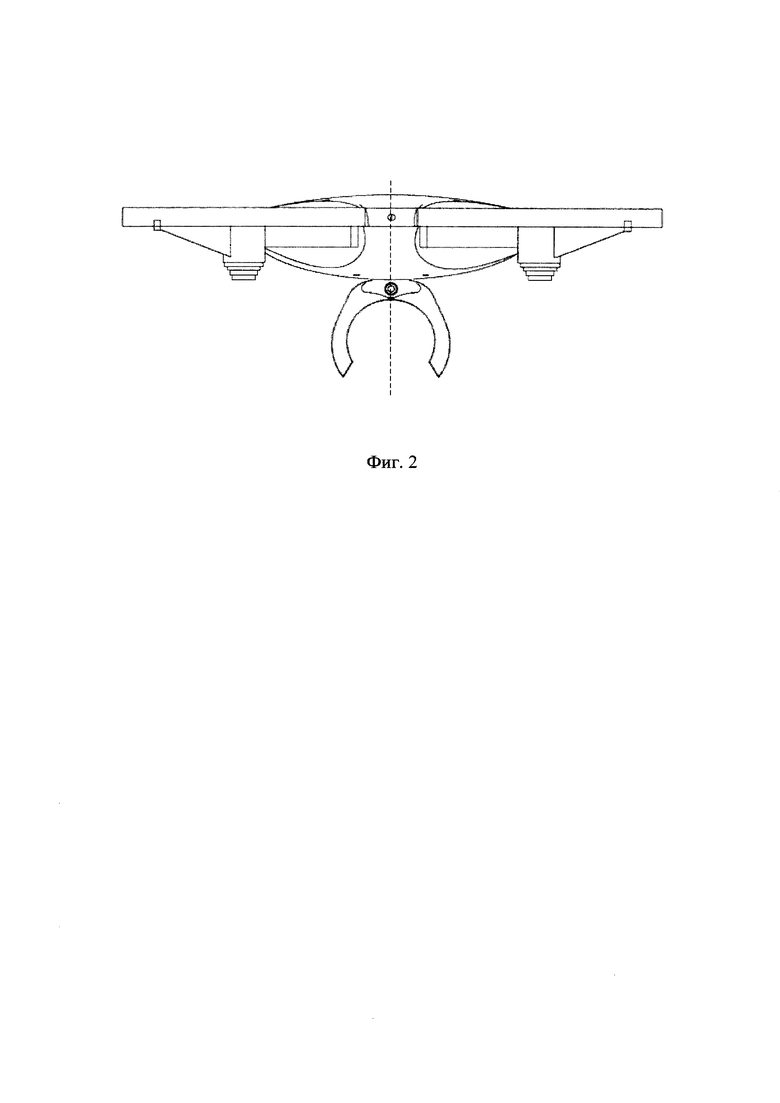
На фиг. 2 изображен БПЛА мультикоптерного типа (квадрокоптер) в состоянии полета со сложенными телескопическими ножками, с разведенными клещами.
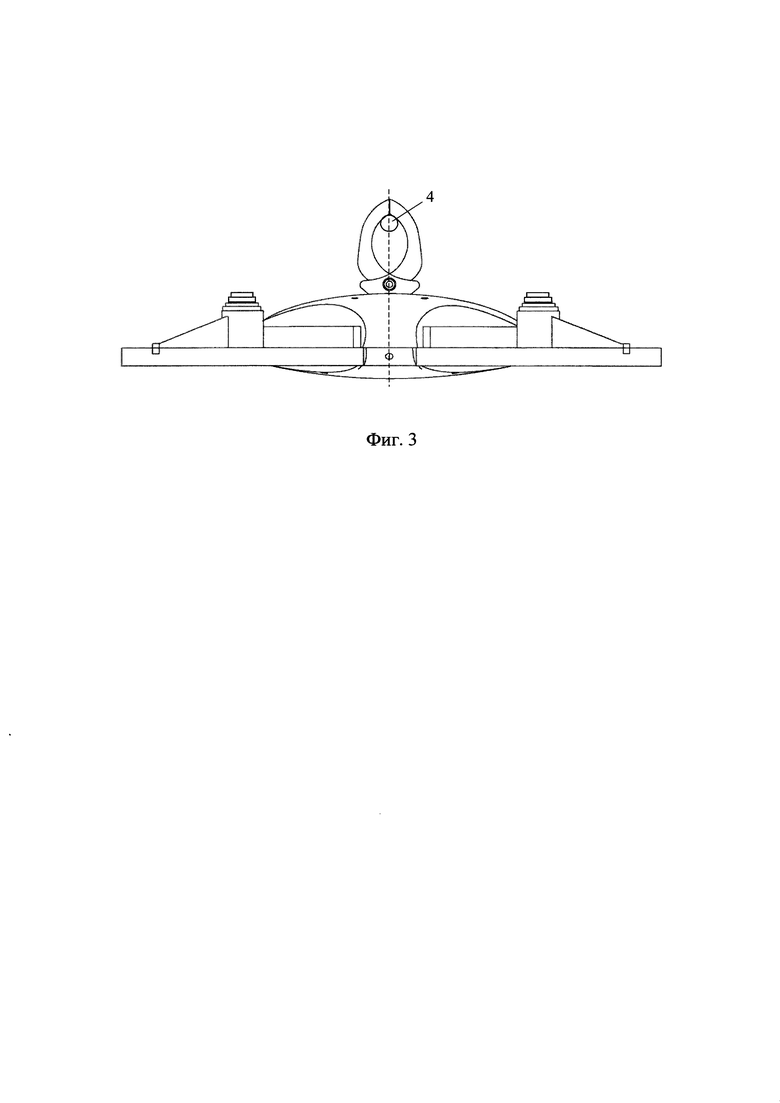
На фиг. 3 изображен БПЛА мультикоптерного типа (квадрокоптер), находящийся в перевернутом состоянии после захвата провода и отключения двигателей, где 4 - провод воздушной линии электропередачи.
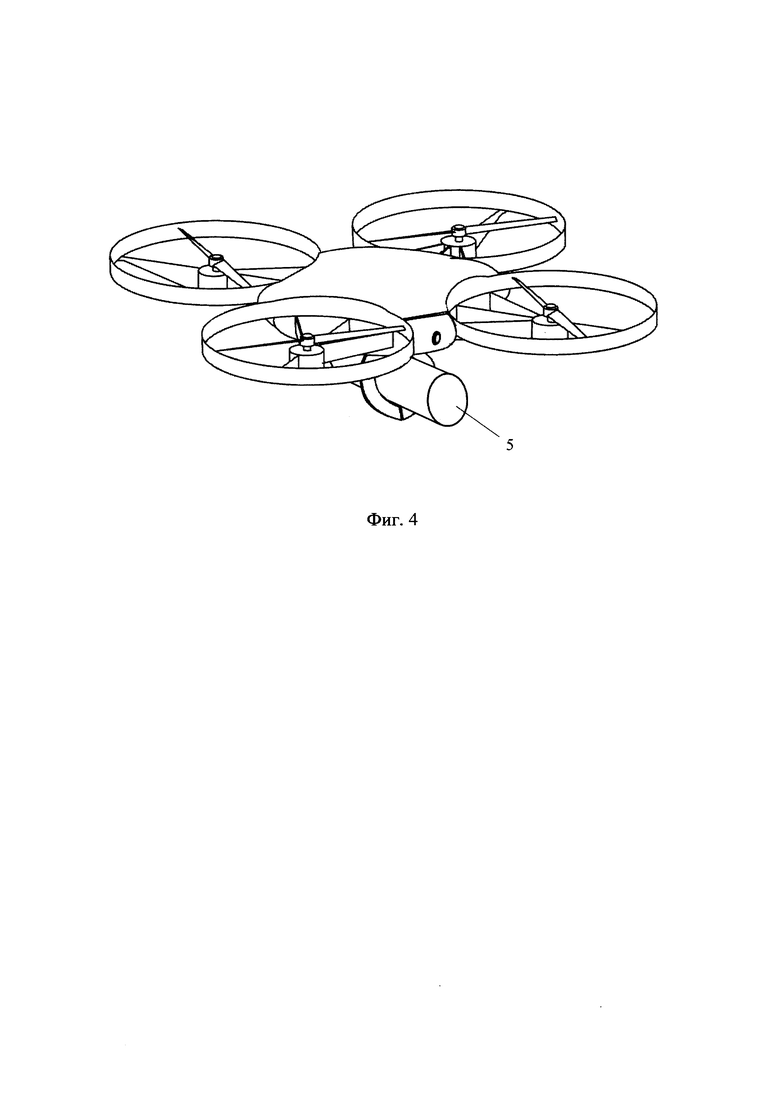
На фиг. 4 изображен БПЛА мультикоптерного типа (квадрокоптер) в состоянии полета с полезным грузом, удерживаемым сведенными токовыми клещами, где 5 - противопехотная осколочная мина повышенной эффективности дистанционной установки ПОМ-3 в транспортном положении.
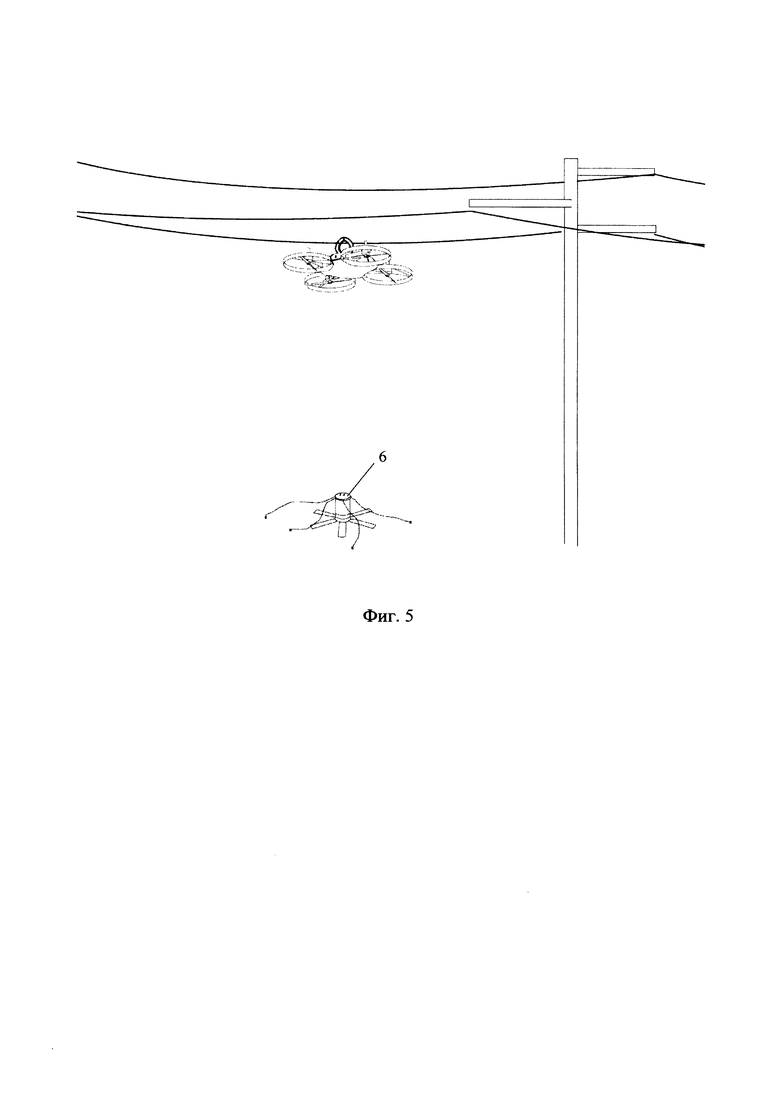
На фиг. 5 изображен БПЛА мультикоптерного типа (квадрокоптер), находящийся в подвешенном состоянии на проводе воздушной линии электропередачи после захвата провода токовыми клещами и отключения двигателей, где 6 - противопехотная осколочная мина повышенной эффективности дистанционной установки ПОМ-3, находящаяся в боевом положении.
Осуществление изобретения
Прицеливание БПЛА при приближении к проводу осуществляется оператором посредством управления аппаратом с использованием поворотной видеокамеры 1, установленной таким образом, чтобы имелась возможность ее использования на всех основных этапах функционирования БПЛА. Такими этапами являются:
- наблюдение (ведение разведки) во время полета;
- поиск провода воздушной линии для осуществления заряда и осуществление захвата данного провода токовыми клещами (при этом, когда провод оказывается внутри разведенных токовых клещей, оператор, наблюдая данный момент посредством видеокамеры, дает сигнал на замыкание клещей, а затем, в случае успешного захвата - на отключение двигателей);
- осуществление заряда АКБ БПЛА в подвешенном (перевернутом) состоянии (на данном этапе также имеется возможность осуществления разведки посредством поворота камеры в нужную сторону);
- запуск двигателей и выход из захвата провода воздушной линии электропередач (выход из захвата происходит по команде оператора на разведение токовых клещей при наблюдении им посредством видеокамеры перехода БПЛА в устойчивое, не перевернутое положение).
Особенностью предлагаемого решения выхода аппарата из захвата с проводом является такое включение двигателей, при котором БПЛА переворачивается из висячего состояния в устойчивое состояние полета, при котором захваченный провод оказывается в крайнем нижнем положении внутреннего пространства токовых клещей на оси симметрии аппарата. После этого клещи разводятся в стороны и БПЛА осуществляет свободный полет, выходя из зацепления с проводом. Таким образом, за счет размещения кольцевого магнитопровода в нижней части на оси симметрии, появляется возможность уверенного осуществления отсоединения от провода воздушной линии электропередачи, без неуправляемого вращения аппарата вокруг него. Контроллер управления двигателями настроен таким образом, что включение двигателей в висячем положении осуществляется поэтапно относительно расположения их справа или слева от провода. Это позволяет осуществить поворот аппарата относительно провода и выйти на устойчивое состояние ограниченного полета перед разведением клещей и выходом из зацепления с проводом.
Также БПЛА включает в себя вторичную катушку на магнитопроводе, цепь заряда АКБ с контроллером заряда, АКБ, механизм разведения и сведения полуколец магнитопровода (токовых клещей). Данные элементы находятся в корпусе аппарата и не отражены на фигурах.
Таким образом, за счет особенностей размещения и конструкции кольцевого магнитопровода на БПЛА мультикоптерного типа повышается точность прицеливания БПЛА при охвате разомкнутым магнитопроводом неподвижного провода воздушной линии электропередачи, а также обеспечивается устойчивый полет при выходе БПЛА из зацепления с проводом воздушной линии электропередачи. Дополнительным техническим результатом является возможность использования магнитопровода, выполненного в форме клещей, для удержания полезного груза и сброса его в необходимой точке.
Сопоставительный анализ заявляемого изобретения показал, что совокупность существенных признаков заявленной конструкции БПЛА мультикоптерного типа для осуществления заряда АКБ неизвестна из уровня техники и значит, заявленное изобретение соответствует условию патентоспособности «Новизна».
В уровне техники не было выявлено признаков, совпадающих с отличительными признаками заявленного изобретения и влияющих на достижение заявленного технического результата, поэтому заявленное изобретение соответствует условию патентоспособности «Изобретательский уровень».
Приведенные сведения подтверждают возможность применения заявленного способа для обеспечения заряда АКБ беспилотных летательных аппаратов мультикоптерного типа, и поэтому заявленное изобретение соответствует условию патентоспособности «Промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для зарядки БПЛА от провода воздушной линии электропередачи | 2023 |
|
RU2811167C1 |
| Беспилотный летательный аппарат вертолётного типа | 2022 |
|
RU2799689C1 |
| Роботизированный боевой комплекс | 2023 |
|
RU2819942C1 |
| КОМПЛЕКС БОРЬБЫ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2018 |
|
RU2700107C1 |
| ГИБРИДНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КРИШТОПА (ГЛАК) И СПОСОБ ФУНКЦИОНИРОВАНИЯ ГЛАК (ВАРИАНТЫ) | 2023 |
|
RU2815129C1 |
| Беспилотный летательный аппарат | 2016 |
|
RU2617320C1 |
| Беспилотный летательный аппарат и способ посадки такого аппарата | 2022 |
|
RU2808061C1 |
| ЛЕТАТЕЛЬНЫЕ АППАРАТЫ С НЕСВЯЗАННЫМИ СТЕПЕНЯМИ СВОБОДЫ | 2019 |
|
RU2769822C1 |
| Система доставки груза на место проведения горнодобывающим субъектом взрывных работ (варианты) | 2024 |
|
RU2840365C1 |
| Малый беспилотный летательный аппарат (варианты) | 2023 |
|
RU2824014C1 |
Изобретение относится к области систем управления беспилотными летательными аппаратами. Технический результат - повышение точности прицеливания беспилотного летательного аппарата при охвате разомкнутым магнитопроводом неподвижного провода воздушной линии электропередачи для осуществления заряда аккумуляторных батарей, а также обеспечение устойчивого полета при выполнении отстыковки аппарата от провода воздушной линии. Для этого на беспилотном летательном аппарате коптерного типа размыкаемый кольцевой магнитопровод располагается в нижней части аппарата на вертикальной оси симметрии. При этом размыкание магнитопровода осуществляется путем разведения двух симметричных полуколец магнитопровода. Магнитопровод представляет собой токовые клещи, расположенные в нижней части аппарата. Контроллер управления двигателями настроен таким образом, что включение двигателей в висячем положении осуществляется поэтапно относительно расположения их справа или слева от провода. Это позволяет осуществить поворот аппарата относительно провода и выйти на устойчивое состояние ограниченного полета перед разведением клещей и выходом из зацепления с проводом. 5 ил.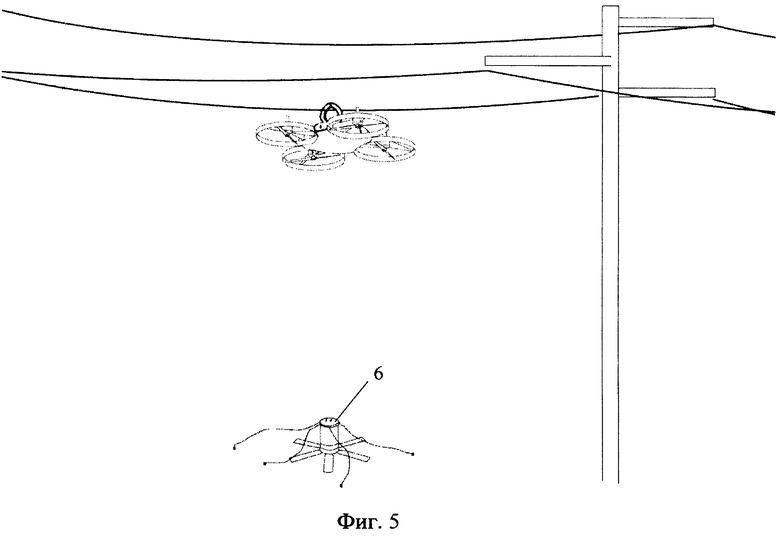
Беспилотный летательный аппарат мультикоптерного типа, подзаряжаемый от воздушных линий электропередач, содержащий расположенный на наружной поверхности аппарата размыкаемый кольцевой магнитопровод, при обхвате которым провода воздушной линии электропередач переменного тока происходит заряд аккумуляторных батарей аппарата от ЭДС, индуцируемой во вторичной катушке данного магнитопровода, отличающийся тем, что магнитопровод расположен на вертикальной оси симметрии в нижней части беспилотного летательного аппарата мультикоптерного типа в форме симметрично расположенных и симметрично разводящихся полуколец, образующих токовые клещи, что позволяет повысить точность прицеливания беспилотного летательного аппарата за счет конструкции коптерного типа при охвате разомкнутым магнитопроводом провода воздушной линии электропередачи, а также обеспечить устойчивый полет при выходе беспилотного летательного аппарата из зацепления с проводом воздушной линии электропередачи, при этом, БПЛА выполнен с возможностью такого включения двигателей, при котором БПЛА переворачивается из висячего состояния в устойчивое состояние полета, при котором захваченный провод оказывается в крайнем нижнем положении внутреннего пространства токовых клещей на оси симметрии аппарата, после этого клещи разводятся в стороны и БПЛА осуществляет свободный полет, выходя из зацепления с проводом, при этом появляется возможность использования магнитопровода, выполненного в форме клещей, для удержания полезного груза и сброса его в необходимой точке, БПЛА включает в себя вторичную катушку на магнитопроводе, цепь заряда АКБ с контроллером заряда, АКБ, механизм разведения и сведения полуколец магнитопровода.
| US 7318564 B1, 15.01.2008 | |||
| Ярусный сдвоенный двухдечный концентрационный стол | 1962 |
|
SU149069A1 |
| Беспилотный летательный аппарат | 2016 |
|
RU2617320C1 |
| Робототехнический комплекс и способ его эксплуатации на высотных объектах, относящихся к электроэнергетике и радиосвязи | 2019 |
|
RU2715682C1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |

