Изобретение касается системы концевого эффектора, имеющей концевой эффектор (рабочий орган) для манипулятора и имеющей управление для концевого эффектора согласно ограничительной части по п.1 формулы изобретения, способа эксплуатации системы концевого эффектора по п.7 формулы изобретения, а также манипулятора по п.18 формулы изобретения.
Из уровня техники известны разные виды захватных устройств для концевых эффекторов манипуляторов. Это, например, вакуумные захватные устройства и захватные устройств Бернулли. Вакуумные захватные устройства имеют, как правило, всасывающую камеру, в которой создается статическое пониженное давление для удерживания заготовки. Это пониженное давление может создаваться по принципу Вентури или посредством источника пониженного давления. Помимо этого, и независимо от этого, известны так называемые захватные устройства Бернулли, которые создают поток между захватным устройством и заготовкой таким образом, что между захватным устройством Бернулли и заготовкой возникает пониженное давление для удерживания заготовки.
На практике оказалось, что ни вакуумные захватные устройства, ни захватные устройства Бернулли не могут в полном объеме удовлетворять требованиям в рамках процесса манипулирования. Правда, вакуумные захватные устройства делают возможным надежное удерживание, подобно неподвижной опоре, что, однако, связано с ограниченной точностью захвата. Захватные устройства Бернулли, напротив, делают возможным плавающее удерживание, так что в любое время возможно выравнивание заготовки. Однако с их помощью возможны только небольшие скорости транспортировки.
В основе изобретения лежит задача, предоставить захватное устройство, которое лучше удовлетворит требования в рамках процесса манипулирования.
Решается эта задача с помощью системы концевого эффектора согласно ограничительной части п.1 формулы изобретения с помощью признаков отличительной части п.1 формулы изобретения.
Благодаря тому, что захватное устройство оснащено как захватным узлом Бернулли, так и захватным узлом другого рода, могут комбинироваться друг с другом преимущества различных захватных устройств. В частности, предусмотренное (согласованное) управление предназначено для того, чтобы во время удерживания заготовки переключать концевой эффектор между удерживанием заготовки посредством по меньшей мере одного захватного узла Бернулли и удерживанием с помощью по меньшей мере одного захватного узла другого рода. В соответствии с этим предложением можно, например, для обработки заготовки подключать захватные узлы Бернулли, а для приема и/или транспортировки и/или складывания заготовки применять захватные узлы другого рода. Становится возможным гибкое манипулирование заготовками самого разного размера при высоких скоростях процесса с помощью одной и той же системы концевого эффектора.
Здесь и предпочтительно захватное устройство имеет захватный узел Бернулли и захватный узел другого рода. Особенно предпочтительно при этом, что захватное устройство выполнено, как описано в заявке на патент, имеющей такую же дату подачи. Поэтому она становится предметом этой заявки.
Предпочтительно захватный узел, который несет заготовку по другому физическому принципу, представляет собой вакуумный захватный узел, имеющий всасывающую камеру, причем в этой всасывающей камере и вместе с тем в ограниченной области между вакуумным захватным узлом и поверхностью заготовки может создаваться пониженное давление для удерживания заготовки. Вакуумные захватные узлы хорошо зарекомендовали себя, в частности, для прочного удерживания заготовок.
По п.5 формулы изобретения предлагается, чтобы концевой эффектор имел исполнительную систему, путем перестановки которой захватные устройства системы инструмента могут переставляться друг относительно друга. Предпочтительно концевой эффектор имеет также несущую систему, на которой расположены захватные устройства, образующие систему инструмента, при этом посредством исполнительной системы захватные устройства путем перестановки несущей системы могут переставляться друг относительно друга. Благодаря этому можно обрабатывать заготовку после приема и перед складыванием. В частности, для изготовления волокнистых композитных конструктивных элементов хорошо зарекомендовало себя, если концевой эффектор адаптирует форму заготовки к форме складочного места перед складыванием. Особенно предпочтительно при этом, что исполнительная система имеет по меньшей мере один, в частности плавно (бесступенчато) переставляемый исполнительный привод, который, в частности, с обращенной от заготовки стороны носителя действует на носитель для его обработки. Предпочтительно предусмотрены несколько исполнительных приводов, которые распределены по поверхности носителя. При этом хорошо зарекомендовало себя, в частности, применение различных исполнительных приводов.
Здесь и предпочтительно концевой эффектор системы концевого эффектора выполнен, как описано в DE 10 2011 106 214 A1 и/или в DE 10 2015 009 177, которые поэтому становятся предметом этой заявки.
Помимо этого, вышеописанная задача в отношении способа решается с помощью способа по п.7 формулы изобретения. Достигаются те же преимущества, что и с помощью системы концевого эффектора, которые описаны выше. При этом для способа применяется описанная система концевого эффектора.
В соответствии с усовершенствованием по п.8 формулы изобретения управление во время удерживания заготовки переключает захватное устройство между удерживанием посредством захватного узла Бернулли и удерживанием посредством захватного узла другого рода. Благодаря наличию захватных устройств, имеющих как захватный узел Бернулли, так и захватный узел другого рода, становится возможным особенно компактный вариант осуществления захватного устройства, которое также может очень гибко манипулировать заготовками различного размера.
Также предпочтительно предусмотрено, что по п.9 формулы изобретения концевой эффектор деформирует (обрабатывает давлением) заготовку путем перестановки переключательной системы перед складыванием. Это хорошо зарекомендовало себя, в частности, для изготовления волокнистых композитных конструктивных элементов и/или гибридных конструктивных элементов.
По п.10 формулы изобретения предлагается, чтобы концевой эффектор, держа заготовку, перемещал ее относительно системы инструмента. То есть не обязательно необходимо складывать заготовку и снова принимать ее, чтобы производить перемещение на концевом эффекторе. Предпочтительно концевой эффектор может путем давления, в частности на стационарную, выравнивающую поверхность перемещать заготовку относительно системы инструмента, или концевой эффектор может путем деформации заготовки перемещать ее относительно системы инструмента. Последнее возможно даже во время транспортировки к месту складывания.
По п.12 формулы изобретения управление выполнено для переключения захватного устройства отдельно или группами в разные рабочие режимы. Благодаря этому возможно в высшей степени гибкое управление концевым эффектором.
По п.13 формулы изобретения предлагается, чтобы заготовка принималась и/или складывалась концевым эффектором с помощью по меньшей мере одного захватного устройства, предпочтительно с помощью нескольких активных, более предпочтительно всех активных захватных устройств в вакуумном рабочем режиме. Прием в вакуумном рабочем режиме, соответственно, складывание в вакуумном рабочем режиме делает возможным надежное складывание заготовки также относительно других заготовок, которые в данном случае находятся в области, близкой к месту складывания, соответственно, месту приема.
Помимо этого, вышеназванная задача решается с помощью манипулятора по п.18 формулы изобретения.
С помощью предлагаемого манипулятора достигаются те же самые преимущества, что и выше в связи с системой концевого эффектора и вышеописанным способом.
Предпочтительно манипулятор выполнен с системой концевого эффектора вышеописанного рода и/или для выполнения способа вышеописанного рода.
Далее изобретение поясняется подробнее с помощью чертежей, изображающих только примеры осуществления. На чертежах показано:
фиг.1: предлагаемая система концевого эффектора, концевой эффектор которой расположен на предлагаемом манипуляторе;
фиг.2: концевой эффектор предлагаемой системы концевого эффектора;
фиг.3: предлагаемый манипулятор при изготовлении гибридного конструктивного элемента;
фиг.4: захватное устройство, которое предпочтительно расположено на предлагаемом концевом эффекторе;
фиг.5: захватное устройство в соответствии с фиг.4 в Бернуллиевском рабочем режиме, и
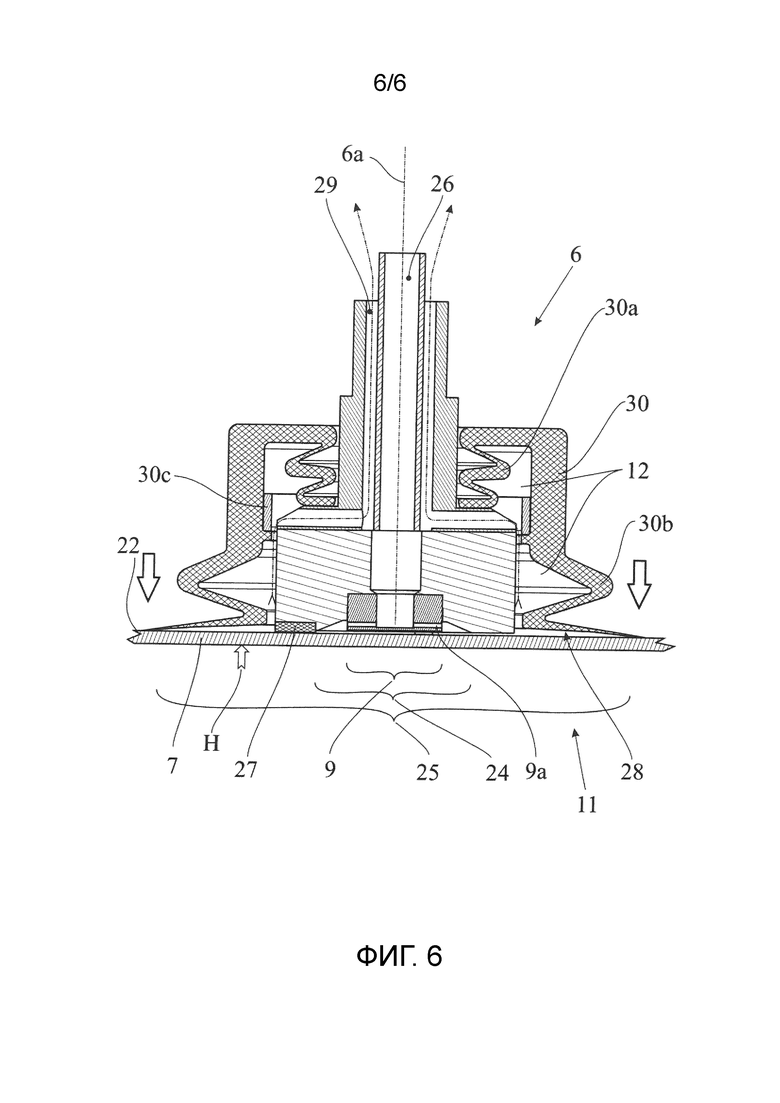
фиг.6: захватное устройство в соответствии с фиг.5 в вакуумном рабочем режиме.
На фиг.1 показана предлагаемая система 1 концевого эффектора, имеющая концевой эффектор 2 для манипулятора 3 и имеющая управление 4 для концевого эффектора 2. Манипулятор 3, в частности робот, имеет предпочтительно по меньшей мере три оси, в частности четыре или пять, или особенно предпочтительно шесть осей. Далее, предусмотрена система 5 инструмента, имеющая несколько захватных устройств 6 для удерживания заготовки 7 по поверхности 22 этой заготовки.
Заготовка 7 может представлять собой объемную заготовку 7, такую как, например, пакет или структурный конструктивный элемент, в частности заготовка 7 может представлять собой структурный конструктивный элемент наземного транспортного средства и/или структурный конструктивный элемент самолета.
Однако с помощью концевого эффектора 2 в качестве заготовки 7 могут также удерживаться материалы, не держащие форму. Эти не держащие форму материалы могут, в частности, представлять собой алюминиевые листы, соответственно, алюминиевые фольги и/или волокнистые материалы, в частности волокнистые маты. Волокнистые материалы могут представлять собой сухие волокна, в частности волокнистые маты, и/или это могут быть предимпрегнированные волокна, в частности предимпрегнированные волокнистые маты, так называемые препреги.
То есть с помощью концевого эффектора 2 могут удерживаться как воздухопроницаемые, так и воздухонепроницаемые заготовки.
Концевой эффектор 2 хорошо зарекомендовал себя, в частности, для изготовления гибридных конструктивных элементов, таких как, напр., Glare®. Эти гибридные конструктивные элементы здесь и предпочтительно изготавливаются путем накладывания друг на друга нескольких не держащих форму материалов. Также с помощью предлагаемого концевого эффектора 2 могут изготавливаться плоскостные конструктивные элементы из стекловолокна или пластика, усиленного стекловолокном.
По меньшей мере одно захватное устройство 6 имеет захватный узел 8 Бернулли, имеющий выпускной узел 9 для вывода потока SB из захватного узла 8 Бернулли между захватным устройством 5 и заготовкой 7 таким образом, чтобы поток SB в ограниченной области между захватным устройством 6 и поверхностью 22 заготовки создавал пониженное давление для удерживания заготовки 7.
Помимо этого, по меньшей мере одно захватное устройство 6 имеет захватный узел 10 другого рода, который переносит заготовку 7 по другому физическому принципу по сравнению с захватным узлом 6 Бернулли.
Для этого управление 4 предназначено для того, чтобы во время удерживания заготовки 7 переключать концевой эффектор 2 между удерживанием заготовки 7 посредством по меньшей мере одного захватного узла 8 Бернулли и удерживанием с помощью по меньшей мере одного захватного узла 10 другого рода.
То есть здесь и предпочтительно по меньшей мере один захватный узел 8 Бернулли отключается, а захватный узел 10 другого рода подключается, или захватный узел 10 другого рода отключается, а захватный узел 8 Бернулли подключается. Благодаря этому можно всегда применять заготовку 7 с захватным устройством 6, идеальным для задачи, выполняемой в данный момент манипулятором 3, соответственно, концевым эффектором 2. Благодаря этому может экономиться энергия и могут лучше выполняться определенные задачи.
Здесь и предпочтительно одно захватное устройство 6 имеет захватный узел 8 Бернулли и захватный узел 10 другого рода. Особенно предпочтительно несколько захватных устройств 6 имеет, в частности все захватные устройства 6 системы 5 инструмента имеют захватный узел 8 Бернулли и захватный узел 10 другого рода.
Особенно хорошо зарекомендовало себя, что захватный узел 10, который несет заготовку по другому физическому принципу, представляет собой вакуумный захватный узел 11, имеющий всасывающую камеру 12, при этом во всасывающей камере 12 и вместе с тем в ограниченной области между вакуумным захватным узлом 10 и заготовкой 7 может создаваться пониженное давление для удерживания заготовки 7.
Предпочтительно захватное устройство 6, имеющее захватный узел 8 Бернулли, имеет Бернуллиевский рабочий режим, в котором заготовка 7 удерживается захватным узлом 8 Бернулли, и/или захватное устройство 6, имеющее вакуумный захватный узел 11, имеет вакуумный рабочий режим, в котором заготовка 7 удерживается вакуумным захватным узлом 11.
Здесь и предпочтительно также захватное устройство 6 имеет захватный узел 8 Бернулли для эксплуатации захватного устройства 6 в Бернуллиевском рабочем режиме и вакуумный захватный узел 11 для эксплуатации захватного устройства 6 в вакуумном рабочем режиме. Помимо этого, захватное устройство 6 может при необходимости иметь комбинированный рабочий режим, в котором заготовка 7 удерживается захватным узлом 8 Бернулли и вакуумным захватным узлом 11.
Необходимо более детально описать один из предпочтительных вариантов осуществления захватного устройства 6, соответственно, захватных устройств 6 с помощью фиг.4, 5 и 6. Однако сначала надо более подробно остановиться на одном из предпочтительных вариантов осуществления концевого эффектора 2, который изображен на фиг.1-3.
Концевой эффектор 2 имеет исполнительную систему 13, путем перестановки которой захватные устройства 6 системы 5 инструмента могут переставляться друг относительно друга, сравн. фиг.2. Дополнительно концевой эффектор 2 может иметь несущую систему 14, на которой расположены захватные устройства 6, образующие систему 5 инструмента, и при этом посредством исполнительной системы 13 захватные устройства 5 путем перестановки несущей системы 14 могут переставляться друг относительно друга. Это показано, например, на последовательности фиг.3. Благодаря этому можно деформировать удерживаемую заготовку 7.
Несущая система 14 имеет по меньшей мере один, предпочтительно по меньшей мере два, более предпочтительно по меньшей мере три носителя 15. Носители 15 по меньшей мере отчасти выполнены из деформируемого материала, в частности упруго деформируемого материала. При этом речь может идти, в частности, о полимерном материале и/или резиновом материале. Дополнительно может быть предусмотрено, чтобы носители 15 несущей системы 14 были соединены между собой.
Исполнительная система 13 имеет по меньшей мере один, в частности плавно переставляемый исполнительный привод 16. Этот привод здесь и предпочтительно с обращенной от заготовки 7 стороны носителя 15 действует на носитель 15 для его деформации.
В этом примере осуществления несколько исполнительных приводов 16 расположены, будучи распределены по поверхности носителя 15. При этом речь может идти о разных видах исполнительных приводов 16. Их привод предпочтительно осуществляется пневматически.
Предпочтительно по меньшей мере один исполнительный привод 16 выполнен в виде пневматического мускула 17. Этот мускул имеет предпочтительно рукавный участок. В этот рукавный участок может подаваться давление, в частности давление воздуха, которое вызывает изменение длины рукавного участка и при этом приводит к созданию движения привода.
Дополнительно или альтернативно исполнительный привод 16 может быть также выполнен в виде пневматического цилиндра 18. Здесь и предпочтительно в качестве исполнительных приводов 16 предусмотрены как пневматический цилиндр 18, так и пневматический мускул 17.
Относительно другого варианта осуществления концевого эффектора ссылаемся на DE 10 2015 009 177 и/или DE 10 2011 106 214 A1. Эти заявки становятся предметом этой заявки, что касается варианта осуществления концевого эффектора 2.
Система 1 концевого эффектора, соответственно, манипулятор 3, в частности концевой эффектор 2, имеет предпочтительно включаемое клапанное устройство 19 для присоединения захватных устройств 6 к источнику 20 снабжения. Предпочтительно клапанное устройство 19 имеет несколько клапанов.
Могут быть также предусмотрены несколько источников 20 снабжения. Источник 20 снабжения, соответственно, источники 20 снабжения могут представлять собой источник давления и/или источник пониженного давления.
Здесь захватный узел 8 Бернулли и вакуумные захватные узлы 11 присоединены к различным источникам 20 снабжения, в этом случае к двум источникам 20a, 20b давления. Один источник 20a давления снабжает сжатым воздухом сопло Вентури, соответственно, несколько сопел Вентури для создания пониженного давления для вакуумного захватного узла 11. Один источник 20b давления снабжает сжатым воздухом захватный узел 6 Бернулли. Здесь и предпочтительно эти два источника давления имеют различные уровни давления. В частности, источник 20a давления для снабжения вакуумного захватного узла 9 имеет более низкий уровень давления, чем источник 20b давления для снабжения захватного узла 6 Бернулли.
Также предпочтительно несколько захватных устройств 5 посредством клапанного устройства 19 могут присоединяться к источнику 20 давления группой. Для включения клапанного устройства 19 здесь и предпочтительно предусмотрено управление 4. Это управление здесь и предпочтительно управляет также исполнительной системой 13. Помимо этого, управление 4 может также управлять манипулятором 3.
При этом группы захватных устройств 6 могут быть выполнены различным образом. Например, для каждого захватного устройства 6 может быть предназначен собственный клапан клапанного устройства 19, так что каждое захватное устройство 6 может активироваться отдельно. В этом случае присоединение захватного устройства 6 к источнику 20 снабжения может осуществляться группой чисто по технологии управления с помощью управления 4. Однако предпочтительно захватные устройства 6 уже присоединены группами к клапанам клапанного устройства 19 таким образом, что группа может включаться только целиком. Благодаря этому может сокращаться количество клапанов.
Группа в одном из примеров осуществления может быть выполнена в виде венца, также группа может быть образована центрально расположенными на концевом эффекторе 2 захватными устройствами 6. Предпочтительно группу образуют два расположенных в углах концевого эффектора 2 захватных устройства 6 и/или группу образуют ряд, в частности расположенных на крае, захватных устройств 6. Помимо этого, группу могут образовывать также отдельные захватные устройства 6, не расположенные рядом друг с другом на концевом эффекторе 2.
В соответствии с предложением, система 1 концевого эффектора, соответственно, манипулятор 3, имеющий систему 1 концевого эффектора, эксплуатируется таким образом, что управление 4 во время удерживания заготовки 7 осуществляет переключение между удерживанием заготовки 7 посредством по меньшей мере одного захватного узла 8 Бернулли и удерживанием с помощью по меньшей мере одного захватного узла 10 другого рода, в частности вакуумного захватного узла 11. Особенно предпочтительно управление во время удерживания заготовки 7 переключает захватное устройство 6 между удерживанием заготовки 7 посредством захватного узла 8 Бернулли и удерживанием посредством захватного узла 10 другого рода, в частности вакуумного захватного узла 11.
Переключение захватных устройств 6, соответственно, между разными захватными устройствами 6 осуществляется здесь и предпочтительно последовательно. То есть переключение захватных устройств, соответственно, групп захватных устройств осуществляется здесь и предпочтительно со сдвигом во времени. Благодаря этому заготовка может надежно удерживаться во время переключения, так как всегда по меньшей мере одно, предпочтительно несколько захватных устройств держат заготовку 7 при переключении захватных устройств, соответственно, между захватными устройствами.
Принимается и/или складывается заготовка 7 здесь и предпочтительно концевым эффектором 2 с помощью по меньшей мере одного захватного устройства 6, предпочтительно с помощью нескольких активных, более предпочтительно всех активных захватных устройств 6, в вакуумном рабочем режиме. Благодаря этому можно избежать негативного влияния потока SB узла Бернулли на окружающие заготовки. После приема заготовки 7 по меньшей мере одно захватное устройство 6, предпочтительно несколько активных захватных устройств 6 во время удерживания заготовки переключается, соответственно, переключаются из вакуумного рабочего режима в Бернуллиевский рабочий режим. Однако здесь и предпочтительно также по меньшей мере одно захватное устройство 6, предпочтительно по меньшей мере два захватных устройства 6, более предпочтительно ровно два захватных устройства 6 может, соответственно, могут оставаться в вакуумном рабочем режиме.
Концевой эффектор 2 может, держа заготовку 7, перемещать ее относительно системы 5 инструмента, когда он давит, в частности на стационарную, выравнивающую поверхность 21. Предпочтительно все активные захватные устройства 6 находятся в Бернуллиевском рабочем режиме.
Помимо этого, здесь и предпочтительно концевой эффектор 2 может деформировать заготовку 7 после приема (фиг.3a) путем перестановки исполнительной системы 13 перед складыванием (фиг.3d). Это можно видеть на фиг.3b и 3c. Для деформации здесь и предпочтительно несколько, в частности все активные захватные устройства 6, за исключением одного или двух захватных устройств 6, эксплуатируются в Бернуллиевском рабочем режиме.
Альтернативно перемещению заготовки 7 относительно системы 5 инструмента посредством давления на выравнивающую поверхность 21, заготовка 7 может также перемещаться относительно системы 5 инструмента путем деформации. Для этого здесь и предпочтительно несколько, в частности все активные захватные устройства 6, за исключением одного или двух захватных устройств 6, эксплуатируются в Бернуллиевском рабочем режиме. Путем двух противоположных движений деформации концевого эффектора 2, при которых различные активные захватные устройства эксплуатируются не в Бернуллиевском рабочем режиме, в частности в вакуумном рабочем режиме, возможно перемещение заготовки 7 относительно системы 5 инструмента подобно движению змеи.
Соответственно после приема и/или перед складыванием, в частности во время транспортировки и/или деформации заготовки 7, заготовка 7 удерживается концевым эффектором 2 посредством нескольких из активных захватных устройств 6, более предпочтительно всех активных захватных устройств 6, в частности за исключением одного или двух захватных устройств 6, в Бернуллиевском рабочем режиме.
Перед складыванием заготовки 7 по меньшей мере одно захватное устройство 6, предпочтительно несколько активных захватных устройств 6, в частности все активные захватных устройств 6, во время удерживания заготовки 7 переключается, соответственно, переключаются из Бернуллиевского рабочего режима в вакуумный рабочий режим. Для облегчения отсоединения заготовки 7 может быть предусмотрено, чтобы при складывании заготовки 7 в вакуумном рабочем режиме для отсоединения захватного устройства 6 от заготовки 7 создавался импульс сжатого воздуха по меньшей мере одним захватным узлом 8 Бернулли, более предпочтительно по меньшей мере несколькими захватными узлами 8 Бернулли, в частности всеми захватными узлами 8 Бернулли.
Для выполнения вышеописанного способа здесь и предпочтительно управление 4 выполнено для включения захватных устройств 6 отдельно или группами в разные рабочие режимы. Предпочтительно управление 4 может включать захватные устройства 6 в рабочий режим «активный», в котором захватное устройство 6 может действовать, соответственно, действует на заготовку 7 с удерживающей силой, и в рабочий режим «неактивный», в котором захватное устройство не действует, соответственно, не может действовать на заготовку 7 с удерживающей силой. Рабочий режим «активный» включает в себя здесь и предпочтительно вакуумный рабочий режим и/или Бернуллиевский рабочий режим и при необходимости комбинированный рабочий режим. И в эти рабочие режимы управление 4 здесь и предпочтительно может включать захватные узлы 6, соответственно, переключать между этими рабочими режимами.
Теперь с помощью фиг.4-6 надо более подробно описать само захватное устройство 6. На предлагаемом концевом эффекторе 2, как уже описано, предусмотрены несколько захватных устройств 6. Захватные устройства 6 удерживают заготовку 7 здесь и предпочтительно с помощью предназначенных для отдельных захватных устройств 6 захватных поверхностей 22. Эти поверхности образуют здесь и предпочтительно общую захватную поверхность 23.
Захватное устройство 6 имеет захватный узел 8 Бернулли. Захватный узел Бернулли имеет выпускной узел 9 для вывода потока SB из захватного узла 8 Бернулли между захватным устройством 6 и заготовкой 7 таким образом, что потоком SB в ограниченной области - Бернуллиевская область 24 пониженного давления - на захватной поверхности 22 может создаваться статическое пониженное давление для удерживания заготовки 7. Поток имеет дополнительно к статической составляющей давления динамическую составляющую давления. В этой связи ссылаемся на уравнение Бернулли.
Далее, предлагаемое захватное устройство 6 имеет вакуумный захватный узел 11. Этот захватный узел включает в себя всасывающую камеру 12. С помощью всасывающей камеры 12 в ограниченном пространстве на захватной поверхности 22 - вакуумная область 25 пониженного давления - может создаваться статическое пониженное давление для удерживания заготовки 7. Здесь и предпочтительно при удерживании заготовки 7 устанавливается статическое состояние. Предпочтительно при удерживании с помощью вакуумного захватного узла 11 во всасывающей камере 12 по существу не возникает потока, так что здесь динамическое давление по существу равно нулю.
При использовании термина «вакуум» здесь имеется в виду давление, более низкое по сравнению с давлением окружающей среды. Это касается, в частности, терминов «вакуумный захватный узел», «вакуумная область пониженного давления» и «вакуумный рабочий режим».
При удерживании заготовки 7 всасывающая камера 12 здесь и предпочтительно образует с заготовкой 7 по существу закрытое пространство. Благодаря этому только для приема заготовки 7 во всасывающей камере 12 должно создаваться пониженное давление, которое затем должно по существу только поддерживаться для удерживания заготовки 7. Это делает возможным особенно низкий расход энергии. Поэтому область между заготовкой 7 и захватным устройством 6 при удерживании заготовки 7 с помощью вакуумного захватного узла 11 выполнена по существу без потока. Таким образом, при удерживании заготовки 7 с помощью вакуумного захватного узла 11 в захватном устройстве 6, в частности во всасывающей камере 12 устанавливается по существу статическое состояние.
В противоположность этому для удерживания заготовки 7 с помощью захватного узла 6 Бернулли непрерывно создается поток SB по меньшей мере в одной отдельной области между захватным устройством 6 и заготовкой 7.
Для создания особенно компактного, надежно удерживающего заготовку 7 и гибко применяемого захватного устройства 6 Бернуллиевская область 24 пониженного давления и вакуумная область 25 пониженного давления здесь по меньшей мере частично пересекаются, или Бернуллиевская область 24 пониженного давления и вакуумная область 25 пониженного давления окружаются друг другом. Благодаря этому захватное устройство может применяться чрезвычайно гибко для заготовок 7 различного размера.
В показанном на фигурах примере осуществления Бернуллиевская область 24 пониженного давления полностью расположена в вакуумной области 25 пониженного давления. Но альтернативно может быть также предусмотрено, чтобы вакуумная область 25 пониженного давления была расположена в Бернуллиевской области 24 пониженного давления.
Далее, может быть предусмотрено, чтобы Бернуллиевская область 24 пониженного давления и вакуумная область 25 пониженного давления окружали друг друга. В этом случае Бернуллиевская область 24 пониженного давления и вакуумная область 25 пониженного давления могут быть отделены друг от друга. Особенно предпочтительно Бернуллиевская область 24 пониженного давления и вакуумная область 25 пониженного давления в этом случае непосредственно примыкают друг к другу и разделяются, в частности, только барьером.
Как показано на фиг.4-6, захватный узел 8 Бернулли отчасти, здесь и предпочтительно полностью, расположен в вакуумном захватном узле 11. При этом захватный узел 8 Бернулли может по меньшей мере отчасти, здесь и предпочтительно полностью быть расположен во всасывающей камере 12. Однако в одном из альтернативных вариантов осуществления может быть также предусмотрено, чтобы вакуумный захватный узел 11 по меньшей мере отчасти, предпочтительно полностью, был расположен в захватном узле 8 Бернулли.
Захватный узел 8 Бернулли здесь и предпочтительно делает возможным плавающее удерживание плоскостной заготовки 7 с некоторой степенью свободы движения. Здесь и предпочтительно удерживаемая захватным узлом 8 Бернулли область заготовки 7 может двигаться относительно захватного узла 8 Бернулли ортогонально по двум осям относительно удерживающей силы H, которая является результатом созданного захватным узлом 8 Бернулли статического пониженного давления.
То есть здесь заготовка 7 может двигаться вдоль поверхности заготовки во время удерживания заготовки 7. При этом поток SB, делающий возможным удерживание заготовки 7 с помощью захватного узла 8 Бернулли, образует здесь и предпочтительно воздушную подушку, на которой может перемещаться заготовка 7.
Вакуумный захватный узел 11 здесь и предпочтительно допускает, в отличие от этого, неподвижное удерживание заготовки 7 без степени свободы движения заготовки 7 вдоль поверхности заготовки. Таким образом, заготовка 7 не может перемещаться относительно вакуумного захватного узла 11 в вакуумном рабочем режиме. Поэтому активный захватный узел 8 Бернулли образует своего рода скользящую опору, в то время как активный вакуумный захватный узел 11 – своего рода неподвижную опору для заготовки 7.
Здесь захватное устройство 6 имеет предпочтительно Бернуллиевский рабочий режим, в котором заготовка 7 удерживается захватным узлом 8 Бернулли, и/или вакуумный рабочий режим, в котором заготовка 7 удерживается вакуумным захватным узлом 11. Дополнительно или альтернативно захватное устройство 6 может иметь комбинированный рабочий режим, в котором заготовка 7 удерживается захватным узлом 8 Бернулли и вакуумным захватным узлом 11. Здесь и предпочтительно захватное устройство 6 в рабочем режиме Бернулли преимущественно, в частности исключительно, удерживает заготовку 7 с помощью захватного узла 8 Бернулли, соответственно, в вакуумном рабочем режиме преимущественно, в частности исключительно 7 с помощью вакуумного захватного узла 11.
Захватный узел 8 Бернулли имеет напорный трубопровод 26 для подачи сжатого воздуха, в частности к цилиндрическому, выпускному узлу 9. Как показано на фиг.5, сжатый воздух течет по напорному трубопроводу в выпускной узел 9 и выводится из него радиально. Для этого выпускной узел 9 здесь и предпочтительно имеет множество отверстий 9a, которые распределены по радиусу. Предпочтительно средние оси отверстий 9a проходят по существу параллельно захватной поверхности 22. Альтернативно они могут быть также наклонены относительно захватной поверхности 22 под углом до 30°. Как можно видеть на фиг.5, здесь и предпочтительно между заготовкой 7 и захватным устройством 6, в частности захватным узлом 8 Бернулли, образуется воздушная подушка, которая образуется потоком SB, создающим также пониженное давление для удерживания заготовки 7. Заготовка 7 удерживается здесь захватным узлом 8 Бернулли по существу без соприкосновения.
Далее, захватное устройство 6, в частности захватный узел 8 Бернулли имеет опорные элементы 27. Они гарантируют, что между заготовкой 7 и захватным устройством 6 в Бернуллиевском рабочем режиме будет оставаться зазор, сравн. фиг.5. Таким образом можно избежать отрыва потока SB. Заготовка 7 может надежно удерживаться в Бернуллиевском рабочем режиме.
Вакуумный захватный узел 11 имеет всасывающую камеру 12. Всасывающая камера 12 впадает во всасывающее отверстие 28, которое ограничивает здесь вакуумную область 26 пониженного давления на захватной поверхности 22. Удерживающая сила для удерживания заготовки 7 создается путем подачи пониженного давления к всасывающей камере 12. Для этого она может с помощью трубопровода 29 пониженного давления подключаться к источнику 20b пониженного давления, в частности насосу, работающему на всасывание, и/или соплу Вентури.
Всасывающая камера 12 предпочтительно по меньшей мере на отдельных участках выполнена трубчатой. Здесь и предпочтительно она образуется сильфонным всасывающим элементом 30, предпочтительно всасывающим элементом в виде сильфона-гармошки. В сильфонном всасывающем элементе 30 здесь и предпочтительно расположен усилительный элемент 30c, в частности из полимерного материала и/или металла.
Как показано на фиг.5, этот сильфонный всасывающий элемент 30 пружиня, установлен предпочтительно на остальной части захватного устройства, в частности своим пружинящим участком 30a. Помимо этого, сильфонный всасывающий элемент 30 имеет пружинящий участок 30b в области всасывающего отверстия для пружинящего прилегания к заготовке.
Сильфонный всасывающий элемент 30 может быть выполнен в виде одной части, в частности цельно, как показано на фиг.3-5, или он может быть выполнен из нескольких частей. Сильфонный всасывающий элемент 30 может иметь несколько, в частности две или три, части сильфонного всасывающего элемента. Они могут отличаться свойствами своего материала.
Как можно видеть на фиг.1, здесь во всасывающем отверстии 28 предусмотрены опорные участки 31 для опирания и прилегания к заготовке 7. Они выполнены здесь и предпочтительно на сильфонном всасывающем элементе 30.
Далее, вакуумный захватный узел 11 имеет трубопровод 29 пониженного давления для подачи пониженного давления во всасывающую камеру 12. Здесь средние оси трубопровода 29 пониженного давления и напорного трубопровода 26 по меньшей мере на отдельных участках проходят коаксиально. Особенно предпочтительно, когда трубопровод 29 пониженного давления помещен в напорный трубопровод 26, и/или, когда напорный трубопровод 26 помещен в трубопровод 29 пониженного давления, как это показано в этом примере осуществления. Такое исполнение делает возможным в высшей степени простое присоединение захватного устройства 6 к концевому эффектору 2.
Здесь и предпочтительно захватное устройство 6 выполнено в виде предварительно смонтированного узла, который в виде узла может монтироваться на концевом эффекторе 2. В том случае, когда трубопровод 29 пониженного давления помещен в напорный трубопровод 26, соответственно, напорный трубопровод 26 в трубопровод 29 пониженного давления, такой монтаж особенно просто возможен с помощью винтового соединения. Здесь и предпочтительно захватное устройство 6 соединяется с концевым эффектором 2 с силовым и/или с геометрическим замыканием, так что возможна простая замена неисправного захватного устройства 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНОЕ УСТРОЙСТВО С ЗАХВАТНЫМ УЗЛОМ БЕРНУЛЛИ И ВАКУУМНЫМ ЗАХВАТНЫМ УЗЛОМ | 2017 |
|
RU2767926C2 |
| Система манипулирования с вакуумным захватным устройством | 2023 |
|
RU2813610C1 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| УЗЕЛ ЗАХВАТНОГО УСТРОЙСТВА И СПОСОБ ДЛЯ ЗАХВАТА КОМПОНЕНТА ШИНЫ | 2016 |
|
RU2699106C2 |
| СПОСОБ ПРОИЗВОДСТВА КОМПОНЕНТА САМОЛЕТА ИЗ ВОЛОКОННО-МЕТАЛЛИЧЕСКОГО СЛОИСТОГО МАТЕРИАЛА | 2016 |
|
RU2752348C2 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| ХИРУРГИЧЕСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА И ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ НЕЕ | 2018 |
|
RU2740114C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ МИНИМАЛЬНО ИНВАЗИВНЫХ ОПЕРАЦИЙ НА СЕРДЦЕ | 1997 |
|
RU2233626C2 |
| КОНФИГУРАЦИИ БРАНШЕЙ И ЭЛЕКТРОДОВ ХИРУРГИЧЕСКОГО КОНЦЕВОГО ЭФФЕКТОРА | 2013 |
|
RU2642219C2 |
| МНОГООСЕВЫЕ ШАРНИРНЫЕ И ПОВОРОТНЫЕ ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ | 2013 |
|
RU2642268C2 |





Изобретение относится к системе концевого эффектора, имеющей концевой эффектор для манипулятора и управление для концевого эффектора, способу управления системой концевого эффектора и манипулятору, имеющему по меньшей мере три оси и систему концевого эффектора. Концевой эффектор имеет систему инструмента, имеющую захватные устройства для удерживания заготовки по поверхности инструмента, исполнительную систему, посредством перестановки которой захватные устройства системы инструмента имеют возможность переставляться друг относительно друга. Захватное устройство имеет захватный узел Бернулли, который имеет выпускной узел для вывода потока воздуха из захватного узла Бернулли между захватным устройством и поверхностью заготовки таким образом, что указанный поток в области между захватным устройством и поверхностью заготовки создает статическое пониженное давление для удерживания заготовки, и захватное устройство имеет вакуумный захватный узел с всасывающей камерой. Управление предназначено для того, чтобы во время удерживания заготовки переключать концевой эффектор между удерживанием заготовки посредством захватного узла Бернулли и удерживанием с помощью по меньшей мере вакуумного захватного узла. Изобретение обеспечивает гибкое манипулирование заготовками разного размера при высоких скоростях. 4 н. и 14 з.п. ф-лы, 6 ил.
1. Система концевого эффектора, имеющая концевой эффектор (2) для манипулятора (3) и имеющая управление (4) для концевого эффектора (2),
причем этот концевой эффектор (2) имеет систему (5) инструмента, имеющую несколько захватных устройств (6) для удерживания заготовки (7) по поверхности (22) инструмента, причем концевой эффектор (2) имеет исполнительную систему (13), посредством перестановки которой захватные устройства (6) системы (5) инструмента имеют возможность переставляться друг относительно друга,
при этом по меньшей мере одно захватное устройство (6) имеет захватный узел (8) Бернулли, который имеет выпускной узел (9) для вывода потока (SB) воздуха из захватного узла (8) Бернулли между захватным устройством (6) и поверхностью (22) заготовки таким образом, что указанный поток (SB) в области между захватным устройством (6) и поверхностью (22) заготовки создает статическое пониженное давление для удерживания заготовки (7),
и при этом по меньшей мере одно захватное устройство (6) имеет вакуумный захватный узел (11) с всасывающей камерой (12), причем в этой всасывающей камере (12) и вместе с тем в ограниченной области между вакуумным захватным узлом (11) и заготовкой (7) может создаваться пониженное давление для удерживания заготовки (7),
причем упомянутое управление (4) предназначено для того, чтобы во время удерживания заготовки (7) переключать концевой эффектор (2) между удерживанием заготовки (7) посредством по меньшей мере одного захватного узла (8) Бернулли и удерживанием с помощью по меньшей мере вакуумного захватного узла (11).
2. Система концевого эффектора по п.1, отличающаяся тем, что захватное устройство (6) имеет захватный узел (8) Бернулли и вакуумный захватный узел (11).
3. Система концевого эффектора по п.1 или 2, отличающаяся тем, что захватное устройство (6), имеющее захватный узел (8) Бернулли, имеет Бернуллиевский рабочий режим, в котором заготовка (7) удерживается захватным узлом (8) Бернулли, и/или захватное устройство (6), имеющее вакуумный захватный узел (11), имеет вакуумный рабочий режим, в котором заготовка (7) удерживается вакуумным захватным узлом (11), предпочтительно, что захватное устройство (6) имеет захватный узел (8) Бернулли для эксплуатации захватного устройства (6) в Бернуллиевском рабочем режиме и вакуумный захватный узел (11) для эксплуатации захватного устройства (6) в вакуумном рабочем режиме, также предпочтительно, что захватное устройство (6) имеет комбинированный рабочий режим, в котором заготовка (7) удерживается захватным узлом (8) Бернулли и вакуумным захватным узлом (11).
4. Система концевого эффектора по одному из пп.1-3, отличающаяся тем, что концевой эффектор (2) имеет несущую систему (14), на которой расположены захватные устройства (6), образующие систему (5) инструмента, и что посредством исполнительной системы (13) захватные устройства (6) путем перестановки несущей системы (14) могут переставляться друг относительно друга.
5. Система концевого эффектора по одному из пп.1-4, отличающаяся тем, что исполнительная система (13) имеет по меньшей мере один, в частности, плавно переставляемый исполнительный привод (16), который, в частности, с обращенной от заготовки (7) стороны носителя (15) действует на носитель (15) для его деформации, предпочтительно, что предусмотрены несколько исполнительных приводов (16), которые расположены, будучи распределены по поверхности носителя (15).
6. Способ управления системой (1) концевого эффектора по одному из пп.1-5,
при этом концевой эффектор (2) имеет систему (5) инструмента, имеющую несколько захватных устройств (6) для удерживания плоскостной заготовки (7),
при этом управление (4) во время удерживания заготовки (7) осуществляет переключение между удерживанием заготовки (7) посредством по меньшей мере одного захватного узла (8) Бернулли и удерживанием с помощью по меньшей мере одного вакуумного захватного узла (11).
7. Способ по п.6, отличающийся тем, что управление (4) во время удерживания заготовки (7) переключает захватное устройство (6) между удерживанием посредством захватного узла (8) Бернулли и удерживанием посредством вакуумного захватного узла (11).
8. Способ по п.6 или 7, отличающийся тем, что концевой эффектор (2) деформирует заготовку (7) путем перестановки исполнительной системы (13) перед складыванием.
9. Способ по одному из пп.6-8, отличающийся тем, что концевой эффектор (2), удерживая заготовку (7), перемещает ее относительно системы (5) инструмента, предпочтительно, что концевой эффектор (2) путем давления, в частности, на стационарную, выравнивающую поверхность (21) перемещает заготовку (7) относительно системы (5) инструмента, или что концевой эффектор (2) путем деформации заготовки (7) перемещает ее относительно системы (5) инструмента.
10. Способ по одному из пп.6-9, отличающийся тем, что для перемещения заготовки (7) относительно системы (5) инструмента все активные захватные устройства (6) эксплуатируются в Бернуллиевском рабочем режиме.
11. Способ по одному из пп.6-10, отличающийся тем, что управление (4) выполнено для включения захватных устройств (6) отдельно или группами в разные рабочие режимы.
12. Способ по одному из пп.6-11, отличающийся тем, что заготовка принимается и/или складывается концевым эффектором (2) с помощью по меньшей мере одного захватного устройства (6) в вакуумном рабочем режиме.
13. Способ по одному из пп.6-12, отличающийся тем, что после приема заготовки (7) по меньшей мере одно захватное устройство (6), предпочтительно несколько активных захватных устройств (6), в частности все активные захватные устройства (6), во время удерживания заготовки (7) переключается, соответственно переключаются, из вакуумного рабочего режима в Бернуллиевский рабочий режим,
и/или
что перед складыванием заготовки (7) по меньшей мере одно захватное устройство (6), предпочтительно несколько активных захватных устройств (6), в частности все активные захватные устройства (6), во время удерживания заготовки (7) переключается, соответственно переключаются, из Бернуллиевского рабочего режима в вакуумный рабочий режим.
14. Способ по одному из пп.6-13, отличающийся тем, что по меньшей мере одно захватное устройство (6), предпочтительно по меньшей мере два захватных устройства (6), более предпочтительно ровно два захватных устройства (6) остаются в вакуумном рабочем режиме.
15. Способ по одному из пп.6-14, отличающийся тем, что после приема и/или перед складыванием, в частности во время транспортировки и/или деформации заготовки (7), заготовка (7) удерживается концевым эффектором (2) посредством нескольких активных захватных устройств (6), более предпочтительно всех активных захватных устройств (6), в частности за исключением одного или двух захватных устройств (6), в Бернуллиевском рабочем режиме.
16. Способ по одному из пп.6-15, отличающийся тем, что при складывании заготовки (7) в вакуумном рабочем режиме для отсоединения захватных устройств (6) от заготовки (7) по меньшей мере одним захватным узлом (8) Бернулли, более предпочтительно по меньшей мере несколькими захватными узлами (8) Бернулли, создается импульс сжатого воздуха.
17. Манипулятор, в частности робот, имеющий по меньшей мере три оси, имеющий систему концевого эффектора по одному из пп.1-5.
18. Манипулятор, в частности робот, с по меньшей мере тремя осями и с системой концевого эффектора по одному из пп.1-5, которая выполнена с возможностью управления способом по одному из пп.6-17.
| DE 60313279 T2, 27.12.2007 | |||
| DE 10319272 A1, 25.11.2004 | |||
| JP 2003048620 A, 21.02.2003 | |||
| JP 2003128279 A, 08.05.2003 | |||
| JP 2010264551 A, 25.11.2010. |

