Изобретение относится к машиностроению, а именно к захватным устройствам промышленных роботов и манипуляторов для автоматизации технологических процессов сборки и перемещения деталей.
Известен захват манипулятора [Патент на полезную модель Вакуумное захватное устройство: пат. №30113 РФ: МПК B25J 15/06: B62D 57/032 / Градецкий В.Г., Калиниченко С.В., Шокин А.И., Соловьев И.Л., Кравчук Л.Н., Самохвалов Г.В.; заявитель и патентообладатель: Институт проблем механики РАН; заявл. 26.03.2003; опубл. 20.06.2003], который относится к робототехнике и может быть использован в машиностроении. Захват манипулятора содержит корпус и размещенную в нем соединенную с источником вакуума герметичную полость из эластичного материала, выполненную в виде пластины с размещенным по ее периметру уплотнением относительно поверхности захвата. При этом пластина закреплена относительно корпуса с помощью размещенной в ее центре втулки и с помощью пружин, часть из которых, соединенных с краем пластины, размещены горизонтально, а соединенные с поверхностью пластины - вертикально.
Недостатком данного захвата является ограничение технологических возможностей, связанное с низкой грузоподъёмностью и ограниченной схватывающей способностью.
Наиболее близким техническим решением, выбранным в качестве прототипа, является захватное устройство [Патент на изобретение «Система концевого эффектора» пат. №2 762 436 РФ: МПК B25J 15/06 / РАЙНХОЛЬД, Рафаэль (DE), КВАСТ, Саша (DE); заявитель и патентообладатель: БРЕТЬЕ-АУТОМАЦИОН ГМБХ (DE); заявл. 20.07.2017; опубл. 21.12.2021, бюл. №36]. Система содержит манипулятор и захватное устройство (Концевой эффектор). Захватное устройство имеет по меньшей мере один захват Бернулли и один захватный вакуумный узел другого принципа работы. Каждый из захватов крепится на исполнительную систему, выполненную в виде подпружиненных штоков, подвижно закрепленных на основании, которые могут двигаться друг относительно друга, изгибая заготовку (объект). Между захватным устройством и поверхностью заготовки создается статическое пониженное давление всасывающей камерой (генератором вакуума) для удерживания заготовки. Отделение заготовки от захватных узлов захватного устройства происходит за счет клапана низкого давления, подключенного к системе управления.
С существенными признаками изобретения совпадает следующая совокупность признаков прототипа: содержит манипулятор, систему управления, клапан низкого давления, основание с установленной исполнительной системой, выполненной в виде подпружиненных штоков с закрепленными на них захватами Бернулли, каждый из которых имеет выпускной узел в виде соединительного штуцера вакуумной магистрали.
Недостатком прототипа является ограничение технологических возможностей, что связано с работой только с плоскими или вогнутыми заготовками относительно малой кривизны.
Задачей изобретения является расширение технологических возможностей за счет обеспечения надежного захвата и манипулирования объектов с криволинейной поверхностью любой формы.
Это достигается тем, что система манипулирования содержит манипулятор, систему управления, клапан низкого давления, всасывающую камеру (генератор вакуума) и вакуумное захватное устройство, имеющее корпус с установленной исполнительной системой, выполненной в виде подпружиненных штоков с закрепленными на них захватами Бернулли, каждый из которых имеет выпускной узел в виде штуцера, соединенного с вакуумной магистралью.
В предложенном решении каждый из независимых штоков соединен с захватом Бернулли посредством сферического шарнира, выполненного в виде обоймы, сопряженной с полой самоустанавливающейся сферой, связанной посредством штуцера с вакуумной магистралью.
Выполнение исполнительной системы в виде независимых штоков позволяет выровнять соединенные с ними захваты Бернулли по высоте (разница выступов и впадин) кривизны поверхности и обеспечить надёжную фиксацию заготовки.
Наличие сферического шарнира, соединяющего вакуумную магистраль и каждый захват Бернулли посредством штуцеров, позволяет устанавливать каждый из захватов Бернулли по нормали к любому участку криволинейной поверхности за счет наличия полой самоустанавливающейся сферы.
Таким образом, совокупность отличительных признаков предлагаемого решения позволит расширить функциональные возможности за счет обеспечения требуемой ориентации захватов Бернулли на криволинейной поверхности и, соответственно, надежного захвата, и манипулирования.
Сущность изобретения поясняется графическим материалом.
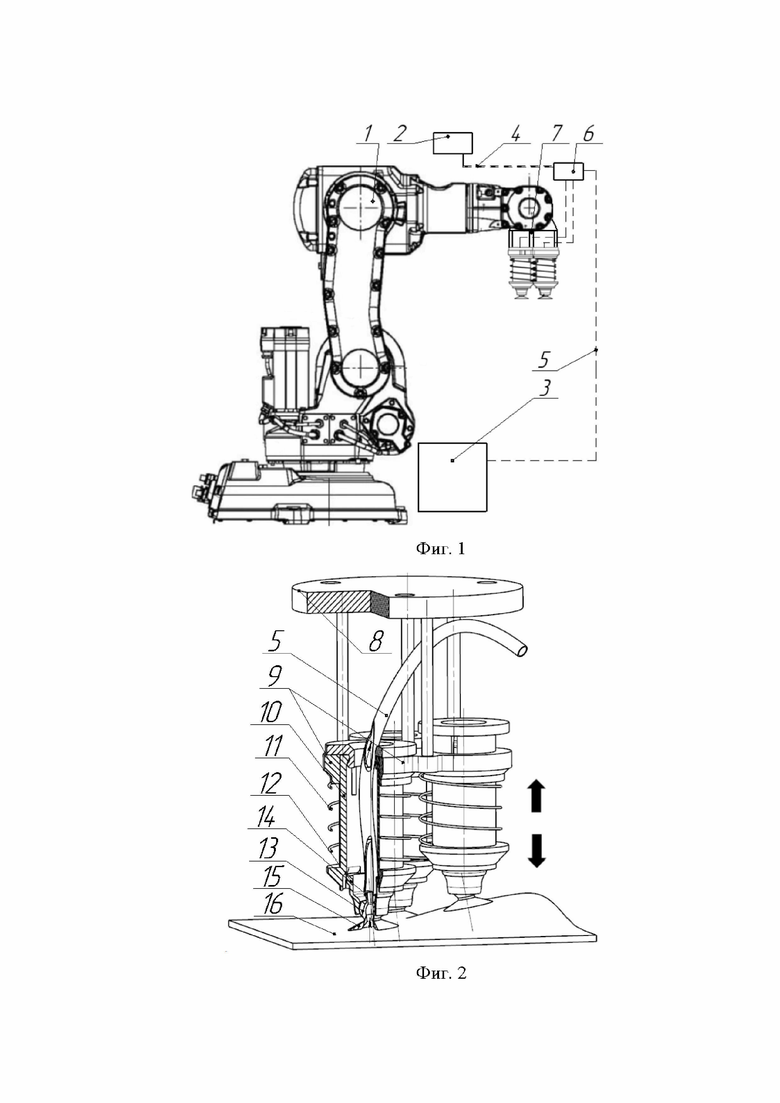
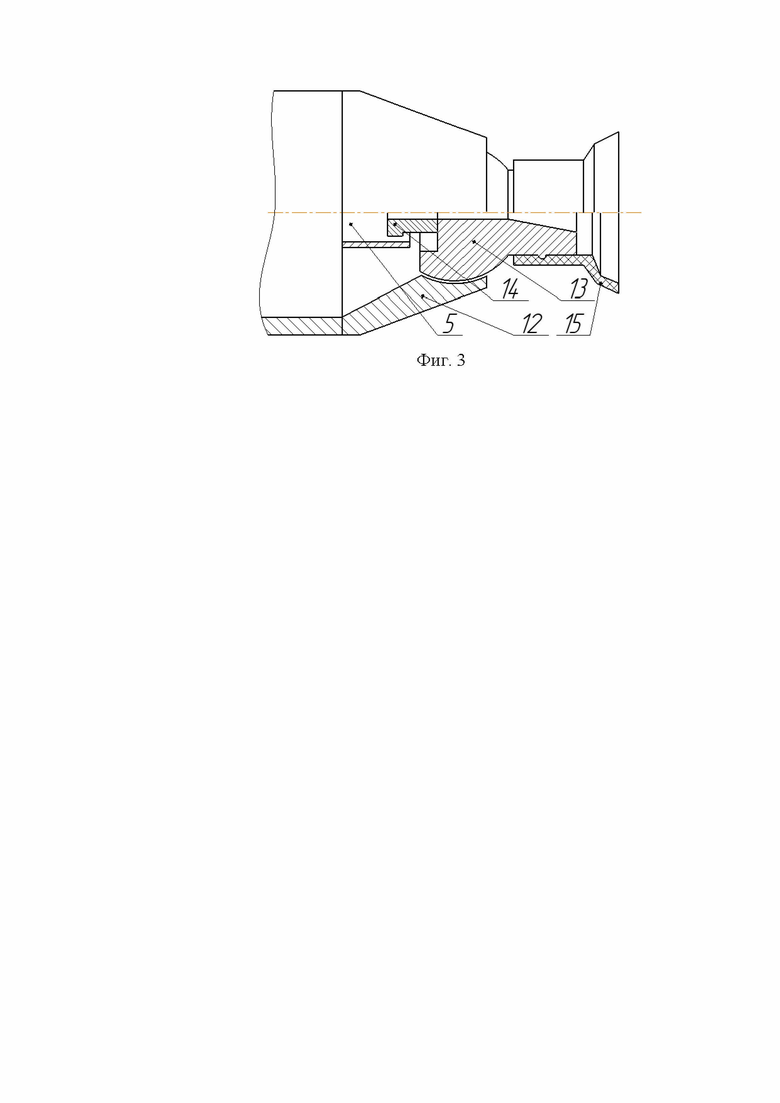
На фигуре 1 представлен общий вид системы. На фигуре 2 представлен общий вид захватного устройства. На фигуре 3 представлен сферический шарнир.
Система манипулирования имеет манипулятор 1, связанный с системой управления 2 и генератором вакуума (всасывающей камерой) 3 посредством проводного канала связи 4. Генератор вакуума 3 связан вакуумной магистралью 5 с клапаном низкого давления 6 и захватным устройством 7.
Захватное устройство 7 содержит фланец 8, соединенный с корпусом 9, имеющим, например, три отверстия для установки подвижных штоков 10. Каждый шток 10 оснащен пружиной 11 и обоймой 12 сферического шарнира. Полая самоустанавливающаяся сфера 13 сферического шарнира имеет штуцер 14, соединенный с вакуумной магистралью 5. На каждую полую сферу 13 сферического шарнира устанавливается захват Бернулли 15, который контактирует с заготовкой 16.
Захватное устройство работает следующим образом: манипулятор 1 перемещает и позиционирует захватное устройство 7 на заготовку 16. В зависимости от кривизны поверхности заготовки 16, под действием прикладываемой силы манипулятора 1, происходит сжатие пружин 11 и перемещение штоков 10 относительно корпуса 9 и фланца 8. При этом каждый из захватов Бернулли 15 устанавливается по нормали к участку поверхности заготовки 16 за счет поворота полой самоустанавливающейся сферы 13 в обойме 12 сферического шарнира. Система управления 2 подает сигнал по проводному каналу связи 4 для открытия клапана низкого давления 6 вакуумной магистрали 5, в которой создается низкое давление всасывающей камерой (генератором вакуума) 3. Разряжение между захватом Бернулли 15 и заготовкой 16 происходит за счет соединения полой самоустанавливающейся сферы 13 с вакуумной магистралью 5 посредством штуцера 14. Когда заготовка 16 удерживается захватами Бернулли 15, манипулятор 1 осуществляет перемещение. В заданной точке система управления 2 отправляет сигнал клапану низкого давления 6, в результате открытия которого заготовка 16 отделяется от захватов Бернулли 15.
Таким образом, разрабатываемое захватное устройство является важным элементом любой роботизированной системы, эксплуатируемой при особых условиях труда, например, где необходимо исключить человеческий фактор и повысить качество труда. Захватное устройство позволяет осуществлять захват заготовок с различной криволинейной поверхностью, а также повысить надежность их удержания за счет самовыравнивания захватов Бернулли относительно нормали криволинейной поверхности. Захватное устройство на основе самовыравнивающихся захватов Бернулли может быть использовано в различных отраслях промышленности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОНЦЕВОГО ЭФФЕКТОРА | 2017 |
|
RU2762436C2 |
| Манипулятор | 1982 |
|
SU1045992A1 |
| Вакуумное захватное устройство | 1981 |
|
SU1030292A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО С ЗАХВАТНЫМ УЗЛОМ БЕРНУЛЛИ И ВАКУУМНЫМ ЗАХВАТНЫМ УЗЛОМ | 2017 |
|
RU2767926C2 |
| Робот-манипулятор | 2018 |
|
RU2700304C1 |
| Вакуумный захватный орган | 1980 |
|
SU904846A1 |
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
| Манипулятор | 1988 |
|
SU1563969A1 |
| Вакуумный захват | 1985 |
|
SU1263526A1 |
| Микроманипулятор для установки узлов механизма часов | 1982 |
|
SU1083154A1 |
Изобретение относится к машиностроению, а именно к захватным устройствам промышленных роботов и манипуляторов для автоматизации технологических процессов сборки и перемещения деталей. Система манипулирования содержит манипулятор, связанный с системой управления и генератором вакуума посредством проводного канала связи, клапан низкого давления и вакуумное захватное устройство. Вакуумное захватное устройство имеет фланец с установленной исполнительной системой, содержащей подпружиненные штоки с закрепленными на них захватами Бернулли, каждый из которых имеет выпускной узел в виде штуцера, соединенного с вакуумной магистралью. Исполнительная система выполнена в виде корпуса с подвижно закрепленными независимыми подпружиненными штоками. Каждый из независимых подпружиненных штоков соединен с захватом Бернулли посредством сферического шарнира, выполненного в виде обоймы, сопряженной с полой самоустанавливающейся сферой, связанной посредством штуцера с вакуумной магистралью. Обеспечиваются надежный захват и манипулирование объектами с криволинейной поверхностью любой формы. 3 ил.
Система манипулирования с вакуумным захватным устройством, содержащая манипулятор, связанный с системой управления и генератором вакуума посредством проводного канала связи, клапан низкого давления и вакуумное захватное устройство, имеющее фланец с установленной исполнительной системой, содержащей подпружиненные штоки с закрепленными на них захватами Бернулли, каждый из которых имеет выпускной узел в виде штуцера, соединенного с вакуумной магистралью, отличающаяся тем, что исполнительная система выполнена в виде корпуса с подвижно закрепленными независимыми подпружиненными штоками, каждый из которых соединен с захватом Бернулли посредством сферического шарнира, выполненного в виде обоймы, сопряженной с полой самоустанавливающейся сферой, связанной посредством штуцера с вакуумной магистралью.
| СИСТЕМА КОНЦЕВОГО ЭФФЕКТОРА | 2017 |
|
RU2762436C2 |
| ЕP 4028223 A1, 20.07.2022 | |||
| ЗАХВАТНОЕ УСТРОЙСТВО С ЗАХВАТНЫМ УЗЛОМ БЕРНУЛЛИ И ВАКУУМНЫМ ЗАХВАТНЫМ УЗЛОМ | 2017 |
|
RU2767926C2 |
| Приспособление к мокрому ватеру для отжима аппретированной непосредственно на машине пряжи | 1932 |
|
SU30113A1 |
| JP 2003048620 A, 21.02.2003 | |||
| JP 2003128279 A, 08.05.2003. | |||
